Tài liệu Các đặc tính cơ bản khi hãm động cơ điều khiển pdf
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (343.77 KB, 12 trang )
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
2.4.4. Các đặc tính cơ khi hãm động cơ ĐK:
Động cơ điện ĐK cũng có ba trạng thái hãm: hãm tái sinh, hãm
ngợc và hãm động năng.
2.4.4.1. Hãm tái sinh:
Động cơ ĐK khi hãm tái sinh: >
o
, và có trả năng lợng về
lới.
Hãm tái sinh động cơ ĐK thờng xảy ra trong các trờng hợp
nh: có nguồn động lực quay rôto động cơ với tốc độ >
o
(nh hình
2-34a,b), hay khi giảm tốc độ động cơ bằng cách tăng số đôi cực (nh
hình 2-35a,b), hoặc khi động cơ truyền động cho tải có dạng thế năng
lúc hạ tải với || > |-
o
| bằng cách đảo 2 trong 3 pha stato của động cơ
(nh hình 2-6a,b).
a) Hãm tái sinh khi MSX trở thành nguồn động lực:
Trong quá trình làm việc, khi máy sản xuất (MSX) trở thành
nguồn động lực làm quay rôto động cơ với tốc độ >
0
, động cơ trở
thành máy phát phát năng lợng trả lại nguồn, hay gọi là hãm tái sinh,
hình 2-34.
Trang 70
Phơng trình đặc tính cơ trong trờng hợp này là:
s
s
s
s
M2
M
th
th
th
+
(2-83)
Với:
nm0
2
f1
th
nm
'
2
th
X2
U3
M v;
X
R
s
(2-84)
Và: >
0
; I
2
= I
hts
< 0 ; M = M
hts
< 0 (tại điểm B)
b) Hãm tái sinh khi giảm tốc độ bằng cách tăng số đôi cực:
Động cơ đang làm việc ở điểm A, với p
1
, nếu ta tăng số đôi cực
lên p
2
> p
1
thì động cơ sẽ chuyển sang đặc tính có
2
và làm việc với
tốc độ >
2
, trở thành máy phát, hay là HTS, hình 2-35.
Phơng trình đặc tính cơ trong trờng hợp này chỉ khác là:
2
1
0
2nm02
2
f1
th
2nm
'
2
th
p
f2
v;
X2
U3
M ;
X
R
s
=
; (2-85)
Và: >
02
; I
2
= I
hts
< 0 ; M = M
hts
< 0 (đoạn B
02
)
Trang 71
ĐK
~
R
2f
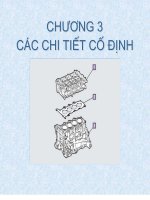
a)
H
ình 2-34: a) Sơ đồ nối dây ĐK khi hãm tái sinh (HTS)
b) Đặc tính hãm tái sinh khi: >
MSX
0
M
hts
0 M
B (m/f)
A(đ/c)
M
c
()
b)
HTS
H
ình 2-35: a) Sơ đồ nối dây ĐK khi HTS bằng cách tăng p
b) Đặc tính HTS khi thay đổi số đôi cực: p
2
> p
1
.
01
M
hts
0 M
c
M
B(m/f)
A
b)
C
p
1
< p
2
02
(đ/c)
~
ĐK
MSX
HTS
R
2f
a)
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
c) Hãm tái sinh khi đảo chiều từ trờng stato động cơ:
Động cơ đang làm việc ở chế độ động cơ (điểm A), nếu ta đảo
chiều từ trờng stato, hay đảo 2 trong 3 pha stato động cơ (hay đảo thứ
tự pha điện áp stato động cơ), với phụ tải là thế năng, động cơ sẽ đảo
chiều quay và làm việc ở chế độ máy phát (hay hãm tái sinh, điểm D),
nh trên hình 2-36. Nh vậy khi hạ hàng ta có thể cho động cơ làm
việc ở chế độ máy phát, đồng thời tạo ra mômen hãm để cho động cơ
hạ hàng với tốc độ ổn định
D
.
Phơng trình đặc tính cơ trong trờng hợp này thay
0
bằng -
0
:
;
X)(2
U3
M ;
X
R
s
nm0
2
f1
th
nm
'
2
th
(2-86)
Và : |
0
| > |-
0
| , M = M
hts
(điểm D, hạ tải ở chế độ HTS).
Trang 72
2.4.4.2. Hãm ngợc động cơ ĐK:
Hãm ngợc là khi mômen hãm của động cơ ĐK ngợc chiều với
tốc độ quay (M ngợc chiều với
). Hãm ngợc có hai trờng hợp:
a) Hãm ngợc bằng cách đa điện trở phụ lớn vào mạch rôto:
Động cơ đang làm việc ở điểm A, ta đóng thêm điện trở hãm lớn
(R
hn>
= R
2f>
) vào mạch rôto, lúc này mômen động cơ giảm (M < M
c
)
nên động cơ bị giảm tốc độ do sức cản của tải. Động cơ sẽ chuyển
sang điểm B, rồi C và nếu tải là thế năng thì động cơ sẽ làm việc ổn
định ở điểm D (
D
=
ôđ
ngợc chiều với tốc độ tại điểm A) trên đặc
tính cơ có thêm điện trở hãm R
hn>
, và đoạn CD là đoạn hãm ngợc,
động cơ làm việc nh một máy phát nối tiếp với lới điện (hình 2-37).
Động cơ vừa tiêu thụ điện từ lới vứa sử dụng năng lợng thừa từ tải
để tạo ra mômen hãm.
Với:
nm0
2
f1
th
nm
'
f2
'
2
th
X2
U3
M v
;
X
RR
s
+
>
(2-87)
Trang 73
ĐK
~
R
2f>
a) b)
0
0 M
n
M
c
M
D
A (đ/c)
B
HN
R
2f>
C
ụ
H
ình 2-37: a) Sơ đồ nối dây ĐK khi hãm ngợc với R
2f>
.
b) Đặc tính hãm ngợc (HN) khi có: R
2f>
.
0
0 M
c
M
A (đ/c)
(1)
b)
~
MSX
ĐK
D(m/f)
(2)
-
0
R
2f
G
HTS
a)
H
ình 2-36: a) Sơ đồ nối dây ĐK khi HTS bằng cách
đảo 2 trong 3 pha stato động cơ ĐK
b) Đặc tính HTS đảo 2 trong 3 pha stato động cơ
(hay đảo thứ tự pha điện áp stato động cơ ĐK
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
b) Hãm ngợc bằng cách đảo chiều từ trờng stato:
Động cơ đang làm việc ở điểm A, ta đổi chiều từ trờng stato
(đảo 2 trong 3 pha stato động cơ, hay đảo thứ tạ pha điện áp stato),
hình 2-38.
Khi đảo chiều vì dòng đảo chiều lớn nên phải thêm điện trở phụ
vào để hạn chế không quá dòng cho phép I
đch
I
cp
, nên động cơ sẽ
chuyển sang điểm B, C và sẽ làm việc xác lập ở D nếu phụ tải ma sát,
còn nếu là phụ tảI thế năng thì động cơ sẽ làm việc xác lập ở điểm E.
Đoạn BC là đoạn hãm ngợc, lúc này dòng hãm và mômen hãm của
động cơ.
Với:
;
X)(2
U3
M ;
X
RR
s
nm0
2
f1
th
nm
'
f2
'
2
th
+
(2-88)
ls
0
0
>
= (2-89)
Trang 74
2.4.4.3.Hãm động năng động cơ ĐK:
Có hai trờng hợp hãm động năng động cơ ĐK:
a) Hãm động năng kích từ độc lập (HĐN KTĐL):
~
Động cơ đang làm việc với lới điện (điểm A), khi cắt stato
động cơ ĐK ra khỏi lới điện và đóng vào nguồn một chiều (U
1c
) độc
lập nh sơ đồ hình 2-39a.
Do động năng tích lũy trong động cơ, cho nên động cơ vẫn quay
và nó làm việc nh một máy phát cực ẩn có tốc độ và tần số thay đổi,
và phụ tải của nó là điện trở mạch rôto.
Khi cắt stato khỏi nguồn xoay chiều rồi đóng vào nguồn một
chiều thì dòng một chiều này sẽ sinh ra một từ trờng đứng yên so
với stato nh hình 2-39b. Rôto động cơ do quán tính vẫn quay theo
chiều cũ nên các thanh dẫn rôto sẽ cắt từ trờng đứng yên, do đó xuất
hiện trong chúng một sức điện động e
2
.
Vì rôto kín mạch nên e
2
lại sinh ra i
2
cùng chiều. Chiều của e
2
và
i
2
xác định theo qui tắc bàn tay phải: + khi e
2
có chiều đi vào và
là đi ra. Tơng tác giữa dòng i
2
và tạo nên sức từ động F có chiều
xác định theo qui tắc bàn tay trái (hình 2-39b).
Trang 75
0
0 M
c
M
A (đ/c)
b)
(1)
-
0
HN
D
ôđ
H
ình 2-38: a) Sơ đồ nối dây ĐK khi Hãm ngợc bằng cách
đảo 2 trong 3 pha stato động cơ ĐK
b) Đặc tính HN đảo chiều từ trờng stato ĐK
ĐK
~
R
2f
a)
MSX
B
C M
c
M
h.bđ
ĐK
R
2f
K
MSX
H
R
đch
+
-
U
1c
H
ình 2-39: a)Sơ đồ nối dây ĐK khi HĐN KTĐL
b) Sơ đồ nguyên lý tạo mômen hãm HĐN KTĐL
+
+ +
+
F
M
h
e
2
R
i
2
F
b)
a)
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Chú ý rằng, trong trờng hợp hãm ngợc vì:
Lực F sinh ra mômen hãm M
h
có chiều ngợc với chiều quay
của rôto làm cho rôto quay chậm lai và sức điện động e
2
cũng giảm
dần.
* Để thành lập phơng trình đặc tính cơ của động cơ ĐK khi
hãm động năng ta thay thế một cách đẳng trị chế độ máy phát đồng bộ
có tần số thay đổi bằng chế độ động cơ không đồng bộ. Nghĩa là cuộn
dây stato thực tế đấu vào nguồn một chiều nhng ta coi nh đấu vào
nguồn xoay chiều.
Điều kiện đẳng trị ở đây là sức từ động do dòng điện một chiều
(F
mc
) và dòng điện xoay chiều đẳng trị (F
1
) sinh ra là nh nhau:
F
1
= F
mc
(2-90)
Sức từ động xoay chiều do dòng đẳng trị (I
1
) sinh ra là:
111
I.w.2
2
3
F = (2-91)
Sức từ động một chiều do dòng một chiều thực tế sinh ra phụ
thuộc vào cách đấu day của mạch stato khi hãm và biểu diễn tổng quát
nh sau:
F
mc
= a.w
1
.I
mc
(2-92)
Cân bằng (2-91) và (2-92) và rút ra:
mcmc
1
1
1
I.AI
w.2
2
3
w.a
I ==
(2-93)
Trong đó: a, A là các hệ số phụ thuộc sơ đồ nối mạch stato khi
hãm động năng nh bảng (2-2).
Ví dụ, theo bảng (2-2), sơ đồ nối dây và đồ thị vectơ (a):
mc1
o
1mcmc
I.w.330cosw.I2F == (2-94)
Trang 76
Và: a = 3 ;
3
2
A =
Đối với các sơ đồ đấu dây khác nhau của mạch stato, ta có thể
xác định hệ số A theo bảng 2-2.
Bảng 2-2
+ Sơ đồ đấu dây mạch stato và đồ thị véc tơ sức điện động:
Hệ số A: ;
32
1
:d) ;
3
2
:c) ;
2
2
:b) ;
3
2
:)a
Dựa vào sơ đồ thay thế một pha của động cơ trong chế độ hãm
động năng để xây dựng đặc tính cơ (hình 2-40).
ở chế độ động cơ ĐK thì điện áp đặt vào stato không đổi, đó là
nguồn áp, dòng từ hóa từ thông không đổi, còn dòng điện stato
I
à
I
1
, dòng điện stato I
2
biến đổi theo độ trợt s.
Trang 77
R
đch
I
mc
/3
2I
mc
/3
+U
m
-
c)
I
mc
/3
W
1
W
1
R
đch
I
mc
W
1
I
mc
/2
+U
m
-
b)
I
mc
/2
W
1
R
đch
I
mc
W
1
I
mc
+U
m
-
a)
R
đch
+U
m
I
mc
/2
I
mc
/2
W
1
-
d)
30
o
I
mc
W
1
2I
mc
W
1
/3
30
o
I
mc
W
1
/2
I
mc
W
1
F
mc
F
mc
I
mc
W
1
I
mc
W
1
/2
F
mc
I
mc
W
1
/2 I
mc
W
1
/3
F
mc
I
mc
W
1
/2
I
mc
W
1
/3
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Còn ở trạng thái hãm động năng kích từ độc lập, vì dòng điện
một chiều I
mc
không đổi nên dòng xoay chiều đẳng trị cũng không đổi,
do đó nguồn cấp cho stato là nguồn dòng. Mặt khác, vì tổng trở mạch
rôto khi hãm phụ thuộc vào tốc độ nên dòng rôto I
2
và dòng từ hóa I
à
đều thay đổi, vậy nên từ thông ở stato thay đổi theo tốc độ.
Trong chế độ làm việc của động cơ ĐK, độ trợt s là tốc độ cắt
tơng đối của thanh dẫn rôto với từ trờng stato, ở trạng thái hãm
động năng nó đợc thay bằng tốc độ tơng đối:
o
*
= (2-95)
Trang 78
Từ sơ đồ thay thế ta có:
2*'
2
2'
2
*'
2
2'
2
2
*
'
2
'
2
'
2
).X(R
.E
X
R
E
I
+
=
+
=
(2-96)
X
2
Hay:
2*'
2
2'
2
*
'
2
).X(R
.X.I
I
+
=
àà
(2-97)
I
2
R
2
/
*
I
1
X
à
Trong đó:
'
f2
'
2
'
2
RRR +=
E
2
Theo đồ thị vectơ ta có:
R
2f
/
*
I
à
;
2
2
'
2
2
2
'
2
2
1
)sinI()sinII(I ++=
à
H
ình 2-40: Sơ đồ thay thế khi hãm động năng ĐK
Hay ; (2-98)
2
2
'
2
2'
2
22
1
)sinI.I2III ++=
àà
Trong đó:
2*'
2
2'
2
*'
2
2
).X(R
.X
sin
+
=
(2-99)
Thay và sin
'
2
I
2
vào (2-98), ta có:
2*'
2
'2
2
*2'
2
2
à
2*'
2
'2
2
*22
à
2
à
22
1
)(XR
XX2I
)(XR
XI
II
+
+
+
+=
à
à
(2-100)
Từ đó rút ra:
2'
2
2
1
2'
2
2
1
'
2
*
X
I
I
)XX(
1
I
I
R
+
=
à
à
à
(2-101)
Trang 79
E
2
I
1
Từ sơ đồ tha
y
thế hình 2-39, ta có
đồ thị vectơ dòn
g
điện nh hình 2-41.
2
I
à
2
I
2
H
ình 2-41: Đồ thị vectơ
dòng điện khi HĐN
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Từ các biểu thức (2-98) (2-100), sau khi biến đổi ta có: ữ
2*2'
2
2'
2
*
'
2
.)XX(R
.X.I
I
++
=
à
àà
(2-102)
Tơng tự nh đã xét ở động cơ ĐK, ta xác định đợc mômen:
o
2
'
2
2'
2
R
I3
M
=
(2-103)
Hay:
])X(X[R
RX3I
M
2
*2'
2
'2
2o
*'
2
'2
2
à
à
++
=
(2-104)
Đờng cong M = f(
*
) cũng đợc khảo sát tơng tự nh với
đờng cong đặc tính cơ của động cơ ĐK và cho ta những kết quả:
'
2
'
2
*
th
XX
R
+
=
à
(2-105)
)XX(2
XI3
M
'
2o
22
1
th.th
+
=
à
à
(2-106)
Và:
*
*
th
*
th
*
th.th
M2
M
+
=
(2-107)
Biểu thức (2-107) là phơng trình đặc tính cơ của động cơ ĐK
khi hãm động năng kích từ độc lập.
Ta thấy rằng, khi thay đổi R
2f
thì thay đổi, nên thay
đổi, còn M
'
2
R
*
th
th
= const, còn khi thay đổi dòng điện xoay chiều đẳng trị
I
1
, nghĩa là thay đổi dòng điện một chiều I
mc
, thì mômen M
th
thay đổi,
còn
*
= const.
th
Trang 80
Các đờng đặc tính hãm động năng đợc biểu diễn nh trên
hình 2-42. Trên đó: đờng (1) và (2) có cùng điện trở
'
nhng có M
)2(2
'
)1(2
RR
=
th2
> M
th1
nên dòng một chiều tơng ứng I
mc2
> I
mc1
.
Nh vậy khi thay đổi nguồn một chiều đa vào stato động cơ khi
hãm động năng thì sẽ thay đổi đợc mômen tới hạn.
M
c
()
*
0
Còn đờng (2) và (3) thì có cùng dòng điện một chiều nhng
điện trở
'
.
)3(2
'
)2(2
RR
<
Nh vậy khi thay đổi điện trở phụ trong mạch rôto hoặc dòng
điện một chiều trong stato động cơ khi hãm động năng thì sẽ thay đổi
đợc vị trí của đặc tính tính cơ.
b) Hãm động năng tự kích từ:
Động cơ đang hoạt động ở chế độ động cơ (tiếp K kín, tiếp điểm
H hở), khi cho K hở, H kín lại, động cơ sẽ chuyển sang chế độ hãm
động năng tự kích từ. Khi đó, dòng điện I
mc
không phải từ nguồn điện
một chiều bên ngoài, mà sử dụng ngay năng lợng của động cơ thông
qua bộ chỉnh lu ở mạch rôto (hình 2-43a) hoặc bộ tụ điện ở mạch
stato.
Trang 81
H
ình 2-42: Đặc tính cơ của động cơ ĐK khi HĐN-KTĐL
M
th2
M
th1
0 M
A (đ/c)
(3)
(1)
(2)
*
th2
*
th1
HĐN
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
* Ví dụ 2-6:
Hãy lựa chọn đặc tính cơ hãm động năng và xác định các thông
số mạch hãm, gồm dòng điện một chiều I
mc
cấp vào cuộn dây stato và
điện trở phụ R
h
nối vào mạch rôto của động cơ không đồng bộ rôto
dây quấn sao cho mômen hãm cực đại đạt đợc M
h.max
= 2,5M
đm
và
hiệu quả hãm cao. Số liệu cho trớc: Động cơ 11KW; 220V;
953vg/ph, = M
th
/M
đm
= 3,1; cos
đm
= 0,71; cos
o
(không tải) = 0,24;
I
1đm
= 28,4A; I
1.0
(không tải) = 19,2A; R
1
= 0,415; X
1
= 0,465;
E
2nm
(điện áp dây) = 200V; I
2đm
= 35,4A; r
2
= 0,132; X
2
= 0,27; và
K
e
= 1,84.
* Giải:
Trớc hết, xác định thêm các thông số của động cơ:
Tốc độ định mức:
rad/s 8,99
55,9
953
55,9
n
m
m
===
Trang 82
Tốc độ từ trờng quay:
o
= 1000/9,55 = 104,7 rad/s
~
Mômen định mức:
m.N2,110
8,99
1000.11
1000.P
M
m
m
m
==
=
Độ trợt định mức:
05,0
7,104
8,997,104
s
o
mo
m
=
=
=
Điện kháng mạch hóa X
à
đợc xác định theo s.đ.đ. và dòng điện
không tải của stato (coi dòng không tải bằng dòng từ hóa):
===
à
05,11
2,19
212
I
E
X
0.1
0.1
(với:
V 212
3
200
.84,1E.KE
nmf2e0.1
=== )
Điện kháng rôto qui đổi về stato:
=== 92,084,1.27,0K.XX
22
e2
'
2
Theo yêu cầu của đề bài ta có thể chọn đặc tính hãm động năng
có mômen tới hạn là: M
th.đn
= M
h.max
= 2,5M
đm
.
Tốc độ tới hạn có thể chọn bằng tốc độ hãm ban đầu:
*
th
om
*
b
*
th
/ ==
Khi đó ta có đặc tính hãm là đờng 2 trên hình 2-38. Rõ ràng
đặc tính này có hiệu quả hãm thấp vì mômen giảm gần nh tuyến tính
từ tốc độ ban đầu
bđ
=
đm
cho đến = 0.
Để cho việc hãm có hiệu quả cao, ta cần tạo ra một đặc tính cơ
đảm bảo bao một diện tích lớn nhất giữa nó với trục tung của đồ thị
(vùng gạch sọc trên hình 2-44). Khi đó mômen hãm trung bình trong
toàn bộ quá trình hãm sẽ là lớn nhất. Việc tính toán cho thấy đặc tính
cơ dạng này có tốc độ tới hạn:
*
= 0,407.
tu.th
Trang 83
H
ình 2-43: a)Sơ đồ nối dây ĐK khi HĐN TKT
b) Sơ đồ nguyên lý tạo mômen hãm HĐN TKT
+
+ +
+
K
F
F
e
2
i
2
R
M
h
b)
ĐK
MSX
H H
R
đch
CL
a)
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Vậy đặc tính cơ hãm động năng đợc chọn là đờng (1) trên
hình 2-44.
Từ biểu thức của mômen tới hạn hãm động năng (biểu thức 2-
106) ta rút ra biểu thức tính dòng điện xoay chiều đẳng trị I
1
:
A4,43
05,11.3
)92,005,11.(7,104.2.2,110.5,2
X3
)XX(2.M
I
2
2
'
2on.th
1
=
+
=
=
+
=
à
à
Qua hệ số tỷ lệ A của sơ đồ nối dây stato vào nguồn điện một
chiều khi hãm, ví dụ chọn sơ đồ 1 trong bảng 2-2, ta có:
815,032A == , ta xác định đợc dòng điện một chiều cần thiết:
I
mc
= I
1
/A = 43,4/0,815 = 53A
Từ biểu thức của tốc độ tới hạn (2-74) ta xác định đợc giá trị
điện trở trong mạch rôto khi hãm:
Trang 84
=+=+=
à
87,4)92,005,11.(407,0)XX(R
'
2
*
th
'
t2
Tơng ứng với giá trị trớc khi qui đổi là:
=== 44,184,1/87,4K/RR
22
e
'
t2t2
Vậy điện trở phụ cần nối vào mạch rôto là:
R
h
= R
2t
- r
2
= 1,44 - 0,132 = 1,308
2.4.5. Đảo chiều động cơ ĐK:
Giả sử động cơ đang làm việc ở điểm A theo chiều quay thuận
trên đặc tính cơ tự nhiên thuận với tải M
c
:
th
th
th
thth
as2
s
s
s
s
)as1(M2
M
++
+
= (2-108)
Trang 85
0
0 M
c
M
A (đ/cT)
b)
s
thT
-
0
H
ình 2-45: a) Sơ đồ nối dây ĐK khi đảo 2 trong 3 pha
stato động cơ ĐK
b) Đặc tính cơ khi làm việc thuận (A) và ngợc (B)
ĐK
~
R
2f
a)
MSX
M
c
s
thN
B (đ/cN)
0
0,05
bđ
=
đm
(1)
(2)
*
th.t
M
h.max
= M
th.đn
M
đm
3,1M
đm
M
H
ình 2-44: Đặc tính cơ TN và đặc tính cơ hãm ĐN
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Muốn đảo chiều động cơ, ta có thể đảo chiều từ trờng stato
(
o
), hay đảo thứ tự pha điện áp (u
1
) động cơ ĐK (thờng đảo 2 trong
3 pha stato). Khi đảo chiều, dòng đảo chiều rất lớn nên phải cho thêm
điện trở phụ vào mạch rôto để hạn chế I
đch
I
cp
.
Khi động cơ ĐK làm việc ở chiều ngợc lại thì M
th
sẽ đảo dấu
và s
th
> 1 nh hình 2-45:
Động cơ quay ngợc chiều tơng ứng với điểm B trên đặc tính
cơ tự nhiên bên ngợc, hoặc trên đặc tính cơ nhân tạo ngợc.
Đ 2.5. ĐặC TíNH CƠ CủA động cơ đồng bộ (ĐĐB)
2.5.1. Đặc tính cơ của động cơ ĐĐB:
Khi đóng stato của động cơ đồng bộ vào lới điện xoay chiều có
tần số f
1
không đổi, động cơ sẽ làm việc với tốc độ đồng bộ không phụ
thuộc vào tải:
p
f2
1
0
= (2-109)
Trang 86
Nh vậy đặc tính cơ của động cơ ĐĐB này tong phạm vi mômen
cho phép M M
max
là đờng thẳng song song với trục hoành, với độ
cứng = và đợc biểu diễn trên hình 2 -46.
Tuy nhiên khi mômen vợt quá trị số cực đại cho phép M >
M
max
thì tốc độ động cơ sẽ lệch khỏi tốc độ đồng bộ.
2.5.2. Đặc tính góc của động cơ ĐĐB:
Trong nghiên cứu tính toán hệ truyền động dùng động cơ ĐĐB,
ngời ta sử dụng một đặc tính quan trọng là đặc tính góc. Nó là sự phụ
thuộc giữa mômen của động cơ với góc lệch vectơ điện áp pha của
lới U
l
và vectơ sức điện động cảm ứng E trong dây quấn stato do từ
trờng một chiều của rôto sinh ra:
M = f()
Đặc tính này đợc xây dựng bằng cách sử dụng đồ thị vectơ của
mạch stato vẽ trên hình 2-47 với giả thiết bỏ qua điện trở tác dụng
của cuộn dây stato (r
1
0).
Trên đồ thị vectơ hình 2-47:
U
l
- điện áp pha của lới (V)
E - sức điện động pha stato (V)
Trang 87
ĐKB
~
R
đch
a)
MSX
+ U
đk
-
0 M
đm
M
0
b)
H
ình 2-46: Sơ đồ nối dây và đặc tính cơ của động cơ ĐĐB
1
U
I
E
C
-
U
l
sin
j
ix
s
B
A
H
ình 2-47: Đồ thị vectơ của mạch stato của động cơ ĐĐB
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
I - dòng điện stato (A)
- goác lệch giữa U
l
và E;
- góc lệch giữa vectơ điện áp U
l
và dòng điện I.
X
s
= x
à
+ x
1
- điện kháng pha của stato là tổng của điện kháng
mạch từ hóa x
à
và điện kháng cuộn dây 1 pha của stato x
1
()
Từ đồ thị vectơ ta có:
)cos(EcosU
l
=
(2-110)
Từ tam giác ABC tìm đợc:
s
l
Ix
sinU
CA
CB
)cos(
==
(2-111)
Thay (2-110) vào (2-111) ta đợc:
s
l
1
Ix
sinU
EcosU
=
(2-112)
Hay:
= sin
x
EU
cosIU
s
l
1
(2-113)
Vế trái của (2-113) là công suất 1 pha của động cơ.
Vậy công suất 3 pha của động cơ:
= sin
x
EU
3P
s
l
(2-114)
Mômen của động cơ:
=
= sin
x
EU3
P
M
s0
l
0
(2-115)
(2-115) là phơng trình đặc tính góc của động cơ ĐĐB. Theo đó
ta có đặc tính góc là đờng cong hình sin nh trên hình 2-48.
Trang 88
Khi = /2 ta có biên độ cực đại của hình sin là:
s0
l
m
x
EU3
M
= (2-116)
Phơng trình (2-115) có thể viết gọn hơn:
M = M
m
sin (2-117)
M
m
đặc trng cho khả năng quá tảI của động cơ. Khi tải tăng
góc lệch pha tăng. Nếu tải tăng quá mức
2
> , mômen giảm.
Động cơ đồng bộ thờng làm việc định mức ở trị số của góc
lệch = 20
o
ữ
25
o
. Hệ số tải về mômen tơng ứng sẽ là:
5,22
M
M
m
m
M
ữ==
Những điều đã phân tích ở trên chỉ đúng với những động cơ
đồng bộ cực ẩn và mômen chỉ xuất hiện khi rôto có kích từ. Còn đối
với những động cơ đồng bộ cực lồi, do sự phân bố khe hở không khí
không đều giữa rôto và stato nên trong máy xuất hiện mômen phản
kháng phụ. Do đó đặc tính góc có biến dạng ít nhiều, nh đờng nét
đứt trên hình 2-48.
M
M
m
0 /2 2
3/2
H
ình 2-48: Đặc tính góc của động cơ đồng bộ
Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động Ths. Khơng Công Minh Giáo Trình: Truyền động điện Tự động
Trang 89
Câu hỏi ôn tập
1. Có thể biểu diễn phơng trình đặc tính cơ của động cơ một
chiều kích từ độc lập bằng mấy dạng ? hảy viết các dạng phơng trình
đó ? Giải thích các đại lợng trong phơng trình và cách xác định các
đại lợng đó ? Vẽ dạng đặc tính cơ điện và đặc tính cơ ĐM
đl
?
2. Đơn vị tơng đối là gì ? Đơn vị tơng đối của các đại lợng
điện, cơ của động cơ ĐM
đl
đợc xác định nh thế nào ? Viết phơng
trình đặc tính cơ ở dạng đơn vị tơng đối ? ý nghĩa của việc sử dụng
phơng trình dạng đơn vị tơng đối ?
3. Độ cứng đặc tính cơ của ĐM
đl
có biểu thức xác định nh thế
nào ? Giá trị tơng đối của nó ? Biểu thị quan hệ giữa độ cứng với sai
số tốc độ và điện trở mạch phần ứng (theo đơn vị tơng đối). ý nghĩa
của độ cứng đặc tính cơ ?
4. Cách vẽ đặc tính cơ của ĐM
đl
? Cách xác định các đại lợng:
M
đm
,
đm
,
0
, I
nm
, M
nm
, để vẽ đờng đặc tính này ?
5. Có những thông số nào ảnh hởng đến dạng đặc tính cơ của
ĐM
đl
? họ đặc tính cơ nhân tạo khi thay đổi thông số đó ? Sơ đồ nối
dây, phơng trình đặc tính, dạng của các họ đặc tính nhân tạo, nhận
xét về ứng dụng của chúng ?
6. Tại sao khi khởi động ĐM
đl
thờng phải đóng thêm điện trở
phụ vào mạch phần ứng động cơ ? Các dòng điện khởi động lớn nhất
và nhỏ nhất khi khởi động ĐM
đl
thờng khống ở mức nào ? Vẽ các
đặc tính cơ khi khởi động ĐM
đl
với 2 cấp điện trở khởi động ?
7. Động cơ ĐM
đl
có mấy phơng pháp hãm ? Điều kiện để xảy
ra các trạng thái hãm đó ? Sơ đồ nối dây động cơ khi thực hiện các
trạng thái hãm ? ứng dụng thực tế của các trạng thái hãm đó ? Giải
thích quan hệ về chiều tác dụng của các đại lợng điện và chiều
truyền năng lợng trong hệ ở các trạng thái hãm ?
8. Sự khác nhau giữa động cơ một chiều kích từ nối tiếp với
ĐM
đl
về cấu tạo, từ thông, dạng đặc tính cơ, các phơng pháp hãm ?
Có nhận xét gì về đặc điểm và khả năng ứng dụng của ĐM
nt
thực tế ?
Trang 90
9. Có thể biểu thị phơng trình đặc tính cơ của động cơ không
đồng bộ bằng những biểu thức nào ? Viết các phơng trình đó, giải
thích các đại lợng và cách xác định các đại lợng đó khi viết phơng
trình và dựng đặc tính cơ ?
10. Cách vẽ đặc tính cơ tự nhiên theo các số liệu định mức trong
catalo: dạng chính xác, dạng gần đúng và dạng tuyến tính hóa ?
11. Biểu thức xác định độ cứng đặc tính cơ ? Biểu thị quan hệ
giữa độ cứng đặc tính cơ với độ trợt định mức và điện trở mạch rôto
của động cơ ĐK ?
12. Có những thông số nào ảnh hởng đến dạng đặc tính cơ của
động cơ ĐK ? Cách nối dây động cơ ĐK để tạo ra đặc tính cơ nhân tạo
khi thay đổi các thông số này ? Dạng các hộ đặc tính cơ nhân tạo và
ứng dụng thực tế của chúng ?
13. Vẽ các dạng đặc tính cơ khi khởi động động cơ ĐK hai cấp
tốc độ ? Khi khởi động động cơ ĐK, các đại lợng: hệ số trợt tới hạn,
mômen tới hạn thay đổi nh thế nào ? Các biểu thức xác định các đại
lợng đó ? Thờng mômen khởi động lớn nhất của động cơ ĐK bằng
bao nhiêu mômen tới hạn của động cơ ?
14. Động cơ ĐK có mấy trạng thái hãm ? Cách nối dây động cơ
để thực hiện các trạng thái hãm và điều kiện để xảy ra hãm ? Giải
thích quan hệ năng lợng giữa máy sản xuất (tải của động cơ) và động
cơ ở từng trạng thái hãm ? ứng dụng thực tế của các trạng thái hãm ?
15. Giải thích ý nghĩa của đặc tính cơ và đặc tính goác của động
cơ đồng bộ ? Sự phụ thuộc giữa mômen cực đại của động cơ với điện
áp lới ? Mômen cực đại ở đặc tính góc có ý nghĩa nh thế nào với
đặc tính cơ của động cơ ĐĐB ?
Ths. Kh−¬ng C«ng Minh Gi¸o Tr×nh: TruyÒn ®éng ®iÖn Tù ®éng Ths. Kh−¬ng C«ng Minh Gi¸o Tr×nh: TruyÒn ®éng ®iÖn Tù ®éng
Trang 91