mô phỏng truyền động chính của máy bào giường hệ t- đ công suất 15kw
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (365.97 KB, 22 trang )
đề cơng sơ bộ bàI tập lớn
môn: trang bị điện_điện tử máy gia công kim loại
Đề tài : Mô phỏng truyền động chính của máy bào giờng hệ T- Đ
Lời mở đầu
Chơng1. Tổng quan về máy bào giờng
1.1. Đặc điểm công nghệ của máy bào giờng
1.2. Các yêu cầu đối với hệ thống truyền động điện và trang bị điện máy
bào giờng
Chơng2. Các phơng trình cơ bản động cơ điện một chiều của hệ
truyền động T- Đ
2.1. Phơng trình cân bằng điện áp
2.2. Phơng trình mômen của động cơ
Chơng3. Tổng hợp mạch vòng tốc độ truyền động chính máy bào
giờng T-Đ
3.1. Tổng hợp bộ điều khiển của mạch vòng dòng điện R
i
3.2. Tổng hợp bộ điều khiển mạch vòng tốc độ R
Chơng4. Mô phỏng Matlab truyền động chính của máy bào giờng
hệ T- Đ
4.1. Lựa chọn tham số cho động cơ
4.2.Tính chọn bộ điều khiển dòng điện và tốc độ
4.3. Viết chơng trình tạo tín hiệu tốc độ đặt cho máy bào giờng hệT-Đ
4.4. Sơ đồ mô phỏng mạch vòng tốc độ động cơ truyền động chính
4.5. Các đặc tính ra của máy sau khi mô phỏng
Tài liệu tham khảo
Lời nói đầu
1
Sự bùng nổ tiến bộ kĩ thuật trong lĩnh vực điện _ điện tử _ tin học trong
những năm gần đây đã dẫn tới những sự thay đổi sâu sắc cả về mặt lí thuyết và
thực tế của lĩnh vực truyền động điện tự động. Trớc hết phải kể đến là sự ra đời
và ngày càng hoàn thiện của các bộ biến đổi điện tử công suất, với kích thớc gọn
nhẹ, tác động nhanh, độ chính xác cao, .Việc tự động hoá các thiết bị máy móc
sản xuất làm tăng năng suất lao động, nâng cao chất lợng kĩ thuật của quá trình
sản xuất và giảm nhẹ cờng độ lao động. Việc tăng năng suất máy, giảm giá
thành thiết bị của máy là hai yêu cầu chủ yếu đối với hệ thống truyền động điện
và tự động hoá. ở nớc ta hiện nay đã và đang du nhập khá nhiều loại máy móc,
thiết bị rất hiện đại. Điều này đòi hỏi những ngời kĩ s làm việc với chúng phải có
những hiểu biết, những kiến thức tiên tiến bắt kịp thời đại công nghiệp hoá hiện
đại hoá. Trang bị điện _điện tử máy gia công kim loại đề cập tới phần điện_điện
tử máy gia công kim loại. Đây là loại máy chủ yếu và quạn trọng trong công
nghiệp nặng của nền kinh tế nớc ta. Trang bị điện máy bào giờng giúp ngòi kĩ s
có kiến thức về điều khiển tịnh tiến có chu kì của vật thể có quán tính lớn. Mô
phỏng chuyển động chính của máy bào giờng là cơ sở để chúng ta biết đợc dạng
chuyển động và để điều chỉnh tốc độ bàn máy. Để thực hiện việc mô phỏng này
ta sử dụng phần mềm Matlab & Simulink.
Chơng1. Tổng quan về máy bào giờng
2
1.1. Đặc điểm công nghệ của máy bào giờng
Máy bào giờng là loại máy có thể gia công các chi tiết lớn, chiều dài bàn có
thể từ 1,5 m ữ12 m. Tuỳ thuộc vào chiều dài của bàn máy và lực kéo ta có
thể phân loại máy thành ba loại :
+ Máy cỡ nhỏ :
Có chiều dài bàn L
b
< 3 (m)
Có lực kéo F
k
= 30 ữ 50 (kN)
+ Máy cỡ trung bình :
Có chiều dài bàn L
b
= 4ữ 5 (m)
Có lực kéo F
k
= 50 ữ70 (kN)
+ Máy cỡ nặng :
Có chiều dài bàn L
b
> 5 (m)
Có lực kéo F
k
> 70 (kN)
Hình 1-1: Dạng bên ngoài của máy bào giờng.
Trong đó : 1: chi tiết gia công
2: bàn máy
3: dao cắt
4: bàn dao đứng
5: xà ngang cố định
3
Chi tiết gia công đợc kẹp chặt trên bàn máy và có thể chuyển động tịnh
tiến qua lại. Dao cắt đợc kẹp chặt trên bàn dao đứng, bàn dao này đợc đặt trên xà
ngang cố định khi gia công.
Trong quá trình làm việc bàn máy di chuyển qua lại theo các chu kì lặp
lại, mỗi chu kì gồm hai hành trình thuạn và ngợc.
- Hành trình thuận thực hiện gia công chi tiết gọi là hành trình cắt gọt
- Hành trình ngợc bàn máy chạy về vị trí ban đầu, không cắt gọt gọi là
hành trình không tải.
Cứ sau khi kết thúc hành trình ngợc bàn dao lại di chuyển theo chiều
ngang một khoảng gọi là lợng ăn dao s ( mm/ hành trình kép ).
Chuyển động qua lại của bàn máy gọi là chuyển động chính.
Dịch chuyển của bàn dao sau mỗi hành trình kép gọi là chuyển động ăn dao.
Chuyển động phụ là chuyển động nhanh của xà, bàn dao, nâng đầu dao
trong hành trình không tải.
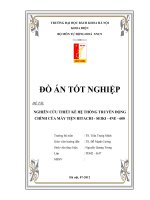
Hình 1-2: Đồ thị tốc độ của bàn máy
Đây là dạng đồ thị thờng gặp.
Khi bàn máy đang ở đầu hành trình thuận và đợc tăng tốc đến tốc độ
V
0
(m/phút) trong khoảng thời gian là t
1
. Sau khi chạy ổn định với tốc độ V
0
trong thời gian t
2
thì dao cắt vào chi tiết. Bàn máy tiếp tục chạy ổn định với tốc
độ V
0
đến hết thời gian t
3
. Khi kết thúc t
3
bàn máy đợc tăng tốc đến V
gh
trong
4
thời gian t
4
. Khoảng thời gian t
5
bàn máy chuyển động với tốc độ ổn định là V
gh
và lúc đó tiến hành gia công chi tiết. Khi gần hết quá trình cắt gọt thì bàn máy sơ
bộ giảm tốc độ đến V
0
trong thời gian t
6
. Khi tốc độ giảm về tới V
0
thì dao đợc đ-
a ra khỏi chi tiết ,bàn máy chạy ổn định tại tốc độ V
0
trong khoảng thời gian t
7
,
bàn máy vẫn chạy với tốc độ nh trên trong thời gian t
8
và dao cắt đợc nhấc lên
khỏi chi tiết. Trong khoảng t
9
bàn máy giảm tốc về 0 sau đó đảo chiều và tăng
tốc để thực hiện hành trình ngợc. Khi tốc độ đạt tới V
ng
thì bàn máy chạy ổn định
và nó giữ tốc độ đó trong khoảng thời gian t
10
. Khi gần kết thúc hành trình ngợc
thì bàn máy giảm tốc về V
0
trong thời gian là t
11
. Khi đạt tới V
0
bàn máy chạy ổn
định trong thời gian t
12
và chuẩn bị giảm tốc về 0 và đảo chiều chuẩn bị tiến hành
cho hành trình thuận tiếp theo.
1.2. Các yêu cầu đối với hệ thống truyền động điện và trang bị điện máy bào
giờng hệ F-Đ
1.2.1. Truyền động chính
Phạm vi điều chỉnh tốc độ truyền động chính là tỉ số giữa tốc độ lớn nhất
của bàn máy và tốc độ nhỏ nhất của bàn máy hay giữa tốc độ lớn nhất trong
hành trình ngợc và tốc độ thấp nhất trong hành trình thuận.
D =
min
max
V
V
=
min.
max.
th
ng
V
V
Trong đó:
V
ng.max
tốc độ lớn nhất của bàn máy ở hành trình ngợc, và thờng
V
ng.max
= 75ữ 120 m/phút
V
th.min
tốc độ nhở nhất của bàn máy trong hành trình thuận, và
thờng V
th.min
= 4ữ6 m/phút
Nh vậy D = (12,5 ữ 30) / 1.
Thông thờng, hệ thống truyền động điện sử dụng động cơ điện một chiều
đợc cấp nguồn từ bộ biến đổi (BBĐ). Theo yêu cầu của phụ tải tốc độ đợc điều
chỉnh theo hai vùng:
5
-Thay đổi điện áp phần ứng trong phạm vi (5ữ6)/1 với mômen trên trục
động cơ là hằng số ứng với tốc độ bàn thay đổi từ V
min
= (4ữ6) m/ph đến
V
gh
=(20ữ25) m/ph, khi đó lực kéo không đổi
-Giảm từ thông động cơ trong phạm vi ( 4ữ 5 )/1, khi thay đổi tốc độ từ
V
gh
đến V
max
=(75 ữ 120)m/ph, khi đó công suất kéo gần nh không đổi.
Nếu sử dụng phơng pháp điều chỉnh từ thông thì sẽ làm giảm năng suất máy. Vì
thế ngời ta thờng mở rộng phạm vi điều chỉnh điện áp, giảm phạm vi điều chỉnh
từ thông, hoặc điều chỉnh tốc độ động cơ trong cả dải bằng thay đổi điện áp phần
ứng. Trong trờng hợp này công suất của động cơ phải tăng lên V
max
/V
min
lần.
Ơ chế độ xác lập, độ ổn định tốc đọ không lớn hơn 5% khi phụ tải thay đổi từ
không đến định mức. Đối với máy bào giờng cỡ nhỏ hệ thống truyền độnchính
thờng là động cơ không đồng bộ khớp li hợp; động cơ không đồng bộ rôto
dây quấn hoặc động cơ một chiều kích từ độc lập và hộp tốc độ. Những máy cỡ
trung bình thì hệ thống truyền động là F-Đ. Đối với máy cỡ nặng hệ truyền động
là hệ F-Đ có bộ khuéch đại trung gian ; hệ chỉnh lu dùng tiristor - động cơ một
chiều.
1.2.2. Truyền động ăn dao
Truyền động ăn dao có tính chất chu kì. Phạm vi điều chỉnh lợng ăn dao là
D= ( 100ữ200)/1. Lợng ăn dao cực đại có thể đạt tới (80ữ100) mm/ hành trình
kép. Cơ cấu ăn dao yêu cầu làm việc với tần số lớn, có thể đạt tới 1000 lần/giờ.
Hệ thống di chuyển đầu dao cần phải đảm bảo theo hai chiều ở cả chế độ di
chuyển làm việc và di chuyển nhanh. Truyền động ăn dao thờng đợc thực hiện
bởi động cơ không đồng bộ rôto lồng sóc và hộp tốc độ.
1.2.3. Truyền động phụ
Truyền động phụ đảm bảo các di chuyển nhanh bàn dao, xà máy, nâng
đầu dao trong hành trình ngợc, đợc thực hiện bởi động cơ không đồng bộ và nam
châm điện.
6
Chơng2. Các phơng trình cơ bản động cơ điện một chiều của hệ
truyền động T- Đ
2.1. Phơng trình cân bằng điên áp
E
dt
di
LIRU
uuu
++=
Trong đó:
U
- điện áp phần ứng
u
R
- điện trở mạch phần ứng
u
I
- dòng điện mạch phần ứng
u
L
- điện cảm mạch phần ứng
E
- sức điện động phần ứng
.
.2
a
pN
KE ==
(1)
Với
p
- số đôi cặp từ chính
N
- số thanh dẫn tác dụng của cuộn dây phần ứng
a
- số đôi mạch nhánh song song của cuộn dây phần ứng
K
- hệ số cấu tạo của động cơ
- từ thông kích từ dới một cực từ
-tốc độ quay của động cơ
Dạng phơng trình cân bằng điện áp khi chuyển sang toán tử Laplace
u
u
u
u
uuuu
R
L
p
REU
I
EIpLIRU
.1
/1).(
.
+
=
++=
u
u
Tp
R
EU
.1
/1
)(
+
=
(2)
2.2. Phơng trình mômen của động cơ
-Phơng trình mômen điện từ
udt
IKM .
=
(3)
-Phơng trình động học
dt
d
JMM
c
+=
7
Với
c
M
- mômen cản trên trục động cơ
J
- mômen quán tính của động cơ
-Phơng trình động học khi chuyển sang dạng toán tử Laplace
pJMM
c
+=
(4)
Jp
MM
c
+
=
1
(5)
-Từ các phơng trình (1); (2); (3); (4); (5) ta có sơ đồ cấu trúc của động cơ điện
một chiều:
Hình 2-1: Sơ đồ cấu trúc của động cơ điện một chiều
Chơng3. Tổng hợp mạch vòng tốc độ truyền động chính máy bào
giờng F-Đ
u
u
pT
R
+
1
/1
.K
Jp
1
.K
d
U
M
c
M
E
8
3.1. Tổng hợp bộ điều khiển của mạch vòng dòng điện R
i
- Khi tổng hợp bộ điều khiển của mạch vòng dòng điện ta tính tới ảnh h-
ởng của sức điện động E. Ta có sơ đồ của mạch vòng dòng điện cho động cơ
điện một chiều
Hình 3-1 : Cấu trúc mạch vòng điều chỉnh dòng điện
- Trong đó :
i
R
- bộ điều chỉnh dòng điện
)1)(.1( pTpT
K
vdk
cl
++
- hàm truyền của bộ chỉnh lu
Với
cl
K
- hệ số khuếch đại chỉnh lu
dk
T
- hằng số thời gian mạch điều khiển chỉnh lu
v
T
- hằng số thời gian của sự chuyển mạch chỉnh lu
pT
K
i
i
.1+
- hàm truyền của cảm biến dòng
Với
i
K
- hệ số khuếch đại của cảm biến dòng
i
T
- hằng số thời gian của cảm biến dòng
- Sơ đồ thu gọn
i
R
).1)(.1( pTpT
K
vdk
cl
++
pT
R
u
u
.1
/1
+
pTi
K
i
.1
+
id
U
I
i
U
K
Jp
1
K
E
C
M
9
Hình 3-2 : Sơ đồ thu gọn của mạch vòng dòng điện
- Trong đó :
i
S
0
là hàm truyền đối tợng
)1)(1)(1)(1(
/1
0
pTpTpTpT
RKK
S
uivdk
uicl
i
++++
=
Do
ivdk
TTT ;;
là các hằng số thời gian rất nhỏ nên ta đặt
ivdksi
TTTT ++=
Nên ta có:
)1)(1(
/1
0
pTpT
RKK
S
usi
uicl
i
++
=
Hàm truyền kín của hệ thống
ii
ii
SR
SR
F
0
0
1
.
+
=
áp dụng tiêu chuẩn môdul tối u ta có
22
.2.21
1
pp
FF
MC
++
==
)1(
1
1
0
=
MC
i
i
FS
R
Thay các giá trị
MCi
FS ;
0
vào ta có
).1(.2
)1)(1.(
ppKK
TpTR
R
icl
usiu
i
+
++
=
- Chọn
si
T=
pTKK
pTR
R
siicl
uu
i
.2
)1.( +
=
Nh vậy bộ điều khiển dòng ta chọn là bộ PI : bộ tỉ lệ tích phân
Hàm truyền của hệ kín:
pT
F
si
Ki
21
1
+
=
(đã bỏ qua thành phần bậc cao T
si
2
p
2
)
3.2. Tổng hợp bộ điều khiển mạch vòng tốc độ R
i
R
i
S
0
id
U
I
_
10
- Sơ đồ của mạch vòng tốc độ khi có mạch vòng dòng điện
Hình 3-3:Sơ đồ mạch vòng tốc độ
- Trong đó :
2
)(
.
K
JR
T
u
c
=
: hằng số thời gian cơ học
pT
K
+1
: hàm truyền của máy phát tốc
- Kết quả khi tổng hợp bộ điều khiển dòng điện theo tiêu chuẩn môdul tối u ta có
hàm truyền :
22
221
1
pTpT
F
si
si
++
=
- Do
si
T
- là hằng số thời gian rất nhỏ nên ta có thể bỏ qua thành phần bậc cao
Khi đó :
pT
F
si
21
1
+
=
Nếu đặt :
)21)(1(
/1.
0
pTpTpTK
KRK
S
sic
iu
++
=
- Do
si
TT ;
là các hằng số thời gian nhỏ nên ta đặt
TTT
sis
+= 2
Nên :
)1(
/1.
0
pTpTK
KRK
S
sc
iu
+
=
R
pT
K
+
1
d
U
i
U
_
i
R
i
S
0
I
i
K
1
pTK
R
c
u
.
id
U
11
Ta có sơ đồ thu gọn
Hình 3-4 : sơ đồ thu gọn mạch vòng tốc độ
- Hàm truyền của hệ thống :
)().(1
)().(
)(
0
0
pSpR
pSpR
pF
+
=
- Tổng hợp bộ điều khiển tốc độ theo tiêu chuẩn môdul tối u
)()( pFpF
MC
=
Và
22
2.21
1
)(
pp
pF
MC
++
=
]1)[(
1
)(
1
0
=
MC
FpS
pR
Thay các giá trị vào và ta chọn
s
T=
ta có:
sui
c
TRKK
TK
pR
2 /1
.
)( =
Bộ điều chỉnh tốc độ là khâu tỉ lệ P
)( pR
)(
0
pS
d
U
U
12
Chơng4. Mô phỏng Matlab truyền động chính của máy bào giờng
4.1. Lựa chọn tham số cho động cơ truyền động chính máy bào giờng
Các thông số:
-Công suất định mức : P
đm
= 15 (KW)
-Điện áp định mức phần ứng: U
đm
= 220(V)
-Tốc độ quay định mức : n
đm
= 1500(v/ph)
-Điện cảm phần ứng :L
u
= 0,2 (H)
-Hiệu suất của động cơ :
đm
= 90%
-Hằng số thời gian máy biến dòng :T
i
= 0,002 (s)
-Hằng số thời gian của bộ chỉnh lu :T
V
= 0,002(s)
-Hằng số thời gian của chuyển mạch điều khiển :T
đk
=0,001(s)
-Hằng số thời gian máy phát tốc :T
= 0,002 (s)
-Mômen quán tính của động cơ : J = 2,45 (kg/m
2
)
4.2.Tính chọn bộ điều khiển dòng điện
i
R
và tốc độ
R
- Tốc độ góc của rôto
55,9
dm
dm
n
=
)/(157
55,9
1500
srad==
- Mômen
dm
dm
dm
P
M
=
)(5,95
157
15000
Nm==
- Dòng điện
dm
dm
dm
U
P
I =
)(2,68
220
15000
A==
4,1==
dm
dm
I
M
K
(1)
13
- Điện trở mạch phần ứng
dm
dm
dmu
I
U
R ).1.(5,0
=
)(16,0
2,68
220
).9,01.(5,0 ==
- Hằng số thời gian mạch phần ứng
)(25,1 s
R
L
T
u
u
u
==
- Hằng số cơ học của động cơ:
)(2,0
)4,1(
16,0.45,2
)(
2
2
s
K
JR
T
u
c
==
=
Chọn
)(10 VU
d
=
- Hệ số khuếch đại của bộ chỉnh lu
22==
d
dm
cl
U
U
K
Chọn
)(7 VU
id
=
- Hệ số khuếch đại của biến dòng
102,0==
dm
id
i
I
U
K
Chọn
)(10 VU
d
=
- Hệ số khuếch đại của máy phát tốc
064,0==
d
U
K
- Tính :
)(005,0 sTTTT
dkVisi
=++=
- Tính :
)(012,02 sTTT
sis
=+=
Vậy hàm truyền của bộ điều chỉnh dòng điện
pTKK
pTR
R
siicl
uu
i
.2
)1.( +
=
14
)
.25,1
1
1.(7,5
.005,0.22.102,0.2
).25.,11.(16,0
p
p
p
R
i
+=
+
=
Hàm truyền của bộ điều chỉnh tốc độ
sui
c
TRKK
TK
R
2 /1
.
=
21,116
012.0.2.064,0.16,0
102,0.2,0.4,1
=
=
R
4.3. Chơng trình tạo tín hiệu đặt cho tốc độ của truyền động chính máy bào
giờng đợc viết trên M-file:
t=[];y=[];
y(1)=0;t(1)=0;k=1;
dt=0.01;dy=0.01;
while (t(k)<1|y(k)<1)
F=y(k)-t(k);
if F>0
y(k+1)=y(k);
t(k+1)=t(k)+dt;
else
y(k+1)=y(k)+dy;
t(k+1)=t(k);
end
k=k+1;
end
while (t(k)<1.5)
y(k+1)=y(k);
t(k+1)=t(k)+dt;
k=k+1;
end
15
while (t(k)<2|y(k)<3)
F=0.5*(y(k)-1)-2*(t(k)-1.5);
if F>0
y(k+1)=y(k);
t(k+1)=t(k)+dt;
else
y(k+1)=y(k)+dy;
t(k+1)=t(k);
end
k=k+1;
end
while (t(k)<3.5)
y(k+1)=y(k);
t(k+1)=t(k)+dt;
k=k+1;
end
while (t(k)<4|y(k)>1)
F=0.5*(y(k)-3)+2*(t(k)-3.5);
if F>0
y(k+1)=y(k)-dy;
t(k+1)=t(k);
else
y(k+1)=y(k);
t(k+1)=t(k)+dt;
end
k=k+1;
end
16
while(t(k)<4.5)
y(k+1)=y(k);
t(k+1)=t(k)+dt;
k=k+1;
end
while(t(k)<6|y(k)>-5)
F=1.5*(y(k)-1)+6*(t(k)-4.5)
if F>0
y(k+1)=y(k)-dy;
t(k+1)=t(k);
else
y(k+1)=y(k);
t(k+1)=t(k)+dt;
end
k=k+1;
end
while (t(k)<7)
y(k+1)=y(k);
t(k+1)=t(k)+dt;
k=k+1;
end
while (t(k)<7.5|y(k)<-1)
F=0.5*(y(k)+5)-4*(t(k)-7);
if F>0
y(k+1)=y(k);
t(k+1)=t(k)+dt;
else
y(k+1)=y(k)+dt;
17
t(k+1)=t(k);
end
k=k+1;
end
while (t(k)<8.5)
y(k+1)=y(k);
t(k+1)=t(k)+dt;
k=k+1;
end
while (t(k)<9|y(k)<0)
F=0.5*(y(k)+1)-(t(k)-8.5);
if F>0
y(k+1)=y(k);
t(k+1)=t(k)+dt;
else
y(k+1)=y(k)+dy;
t(k+1)=t(k);
end
k=k+1;
end
plot(t,y);
grid;
A=[t;y];
save tinhieu.mat A;
18
H×nh4-1: D¹ng tÝn hiÖu tèc ®é ®Æt
4.4. S¬ ®å m« pháng m¹ch vßng tèc ®é cña ®éng c¬ truyÒn ®éng chÝnh m¸y
bµo giêng hÖ T-§
H×nh4-2: S¬ ®å m« pháng m¹ch vßng tèc ®é truyÒn ®éng chÝnh m¸y bµo giêng
19
4.5. C¸c ®Æc tÝnh ra sau khi m« pháng
-D¹ng dßng ®iÖn ra lÊy trªn khèi Scope1:
H×nh 4-3: Dßng ®iÖn ra cña truyÒn ®éng chÝnh m¸y bµo giêng hÖ T-§
-D¹ng tèc ®é ra lÊy trªn khèi Scope :
H×nh4-4: D¹ng tèc ®é ra cña ®éng c¬ truyÒn ®éng chÝnh m¸y bµo giêng hÖ T-§
20
-D¹ng tÝn hiÖu ph¶n håi lÊy trªn khèi Scope2
H×nh 4-5: D¹ng tÝn hiÖu ph¶n håi
21
Tài liệu tham khảo:
[1] : Nguyễn Mạnh Tiến, Vũ Quang Hồi
Trang bị điện- điện tử máy gia công kim loại
Nhà xuất bản giáo dục
[2] : Nguyễn Phùng Quang
Matlab & Simulink dành cho KS ĐKTĐ
Nhà xuất bản Khoa học kĩ thuật
[3] : Bùi Quốc Khánh- Nguyễn Văn Liễn- Phạm Quốc Hải- Dơng Văn Nghi
Nhà xuất bản Khoa học kĩ thuật
Điều chỉnh tự động truyền động điện
22