Xây dựng đặc tính tĩnh cho động cơ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (201.69 KB, 21 trang )
Đồ án tốt nghiệp Trang bị điện
phần iv
xây dựng đặc tính tĩnh
Lớp K35IA
66
Đồ án tốt nghiệp Trang bị điện
Đ4-1: khái niệm
Đặc tính tĩnh có bản chất là mô tả chất lợng tĩnh, sai số tốc độ, độ trơn
điều chỉnh của một hệ thống thông qua giá trị độ cứng đặc tính . Việc xây
dựng đặc tính dựa trên quan hệ giữa tốc độ và dòng điện:
n = f(I)vì M = K..I mà K = const.
Do hệ thống của ta có các phần tử làm việc ở vùng phi tuyến và vùng
tuyến tính cho nên khi xây dựng đặc tính cơ cần phải có các giả thiết sau:
- Động cơ làm việc với mạch từ cha bão hoà (chế độ định mức).
- Đã bù đủ phản ứng phần ứng.
- Hệ số khuyếch đại của BBĐ là hằng số.
- Tiristor là phần tử không có quán tính điện từ.
- Điện trở R = const trong suốt quá trình làm việc.
ở đây ta xây dựng đặc tính với dòng tải là liên tục (điều này mới có ý
nghĩa cho việc khảo sát chất lợng tĩnh).
Lớp K35IA
67
Đồ án tốt nghiệp Trang bị điện
Đ4-2: xây dựng đặc tính tĩnh
I. Sơ đồ cấu trúc của hệ thống
Để xây dựng đợc đặc tính cơ tĩnh ta phải thiết lập đợc sơ đồ cấu trúc của
hệ thống nhờ việc thay thế từng khâu bởi hàm truyền của chúng.
Vì đây là chế độ tĩnh nên các thông số biến đổi (toán tử) p = 0, nh vậy
hàm truyền của các khâu là hằng số.
Ta có sơ đồ cấu trúc của hệ thống nh sau:
II. Phơng trình đặc tính cơ của hệ thống.
Từ sơ đồ cấu trúc ta có:
{[( U
cđ
- n).K
n
- .[I].K
I
.K
- I.R
}.K
Đ
.
n =
K
K.K.K.1
KRI]I.[K.K.KU.K.K.K.K
ĐnI
Đ\\ĐIcdĐIn
+
.
Với I = I - I
ng
.
Khi khâu phản hồi âm dòng có ngắt cha tác động suy ra I < 0.
n =
K1
K.R.IK.U
Đ\\cd
.
+
.
Đây là phơng trình đặc tính cơ tĩnh của hệ thống.
III. Xây dựng đặc tính
Tốc độ lớn nhất của động cơ bị giới hạn bởi độ bền cơ học và liên kết
giữa các phần tử quay. Khi ở tốc độ cao các phần tử này phải chịu một lực điện
và lực ly tâm lớn có thể làm vỡ, bung động cơ và dây quấn động cơ.
Mặt khác khi tốc độ quá lớn, do động cơ lấy điện qua vành góp nên tại cổ
góp sẽ phát sinh ra các tia lửa điện có thể làm hỏng vành góp.
Lớp K35IA
68
K
I
K
n
K
K
Đ
R
\
I
\
I
ng
n
U
cđ
Đồ án tốt nghiệp Trang bị điện
Để đảm bảo an toàn cho ngời và thiết bị tín hiệu thì đặc tính cơ cao nhất
phải đợc xây dựng ứng với đờng có n
đm
= 3000 v/ph.
1. Đờng đặc tính cơ cao nhất
Khi này ta coi hệ thống nh không có khâu phản hồi âm dòng có ngắt. Ph-
ơng rình đặc tính cơ:
n =
K
+
1
KRIU.K
Đ\\cd
.
Trong đó:
K: Hệ số khuyếch đại của toàn hệ thống.
R
: Tổng trở mạch phần ứng.
K
Đ
: Hệ số khuyếch đại của động cơ.
Để dảm bảo cho hệ thống làm việc lâu dài tín hiệu thì đờng đặc tính cơ
cao nhất khi này có điện áp chủ đaọ lớn nhất. Ta có:
U
cđmax
=
K
)KRI()1(n
Đ\\dm
K
++
=
3000 1 0 003 95837 9 14 7384 34 343
95837
9 07883
( , . ,23) . , . ,
,23
,
+ +
=
(V).
Đờng đặc tính này đi qua điểm định mức B
1
(9; 3000) và điểm không tải
lý tởng A
1
(0, n
0max
).
Với n
0max
=
K1
U.K
1
KRIU.K
maxcdĐ\\maxcd
K
+
=
+
.
8,3015
23,95837.003,01
07883,9.23,95837
=
+
=
(v/ph).
A
1
(0; 3015,8); B
1
(9; 3000)
2. Đặc tính cơ khi có cả hai khâu cùng tác động
+) Xác định điểm C
1
(I
ng
; n
ngmax
)
Khi phụ tải tăng tới giới hạn I = 1,5.I
đm
thì khâu hạn chế dòng sẽ làm việc.
Khi này khâu phản hồi âm tốc độ vẫn làm việc trong vùng tuyến tính. Ta có ph-
ơng trình đặc tính cơ:
n =
K
K
+
1
KRIK.K).II.(U.K
Đ\\ĐngIcd
.
I
ng1
= 1,5.I
đm
= 1,5.9 = 13,5 (A).
Lớp K35IA
69
Đồ án tốt nghiệp Trang bị điện
Tại thời điểm I = I
ng
I = 0.
n
ng
=
K
+
1
KRIU.K
Đ\1ngcd
.
=
1,2992
23,95837.003,01
343,34.7384,14.5,1307883,9.23,95837
=
+
(v/ph).
Vậy điểm C
1
(13,5; 2992,1).
+) Xác định điểm làm việc bão hoà D
1
(I
bh
; n
bh
):
Căn cứ vào mạch khuếch đại thuật toán và căn cứ vào mạch IC sử
dụng ta có nhận xét: khi IC làm việc ở chế độ bão hoà:
U
bh
= U
cc
- (1,5 ữ 2) (V)
Với loại IC của hệ thống U
bh
= 13 (V)
Khi phản hồi âm tốc độ bão hoà chỉ có phản hồi âm dòng có ngắt tham
gia.
n=[[U
bh
- .(I
- I
ng
)].K
I
.K
- I.R
].K
Đ
(1)
- Xác định giá trị :
I
d
= ( 2,2 ữ 2,5 ).I
đm
(A)
Ta chọn: I
d
= 2,5.I
đm
= 2,5.9 = 22,5 (A)
Tại điểm dừng n = 0, I = I
d
thay vào phơng trình (1) ta có:
[[U
bh
- .( I
d
- I
ng
)].K
I
.K
- I
d
.R
].K
Đ
= 0
K
= 58,235
Mà ta có: K
y
= K
n
.K
I
= 47,9195
- Xác định K
n
và K
I
:
Chọn K
I
= 0,5 suy ra
K
n
=
84,95
5,0
9195,47
K
K
I
y
==
=
ngd
I
d
bh
II
K.K
R.I
U
u
=
=
5,135,22
235,58.5,0
7384,14.5,22
13
0,179
Vậy = 0,179
- Xác định điểm ứng với tốc độ bão hoà:
áp dụng phơng trình khi sảy ra bão hoà:
Lớp K35IA
70
Đồ án tốt nghiệp Trang bị điện
U
bh
= ( U
cđmax
- .n
bh
).K
n
n
bh
=
n
bh
maxcd
K
U
U
=
2981
003,0
84,95
13
07883,9
=
(v/ph)
- Xác định dòng điện bão hoà ứng với tốc độ bão hoà chỉ còn phản hồi âm
dòng có ngắt tham gia:
Tại n = n
bh
thì I = I
bh
từ phơng trình:
n
bh
= [[U
bh
- .( I
bh
- I
ng
)].K
I
.K
- I
bh
.R
].K
Đ
Với n
bh
= 2981(v/ph) I
d
= 22,5(v/ph)
= 0,179 K
Đ
=34,343
I
ng
= 13,5 (A) K
I
= 0,5
U
bh
= 13 (V) R
= 14,7384()
I
bh
=
u
RK.K.
K
n
K.K.I.K.K.U
I
Đ
bh
IngIbh
+
+
=
7384,14235,58.5,0.179,0
343,34
2981
235,58.5,0.5,13.179,0235,58.5,0.13
+
+
=17,75 (A)
Vậy điểm bão hoà là: D
1
( 17,75; 2981)
4. Xây đựng đờng đặc tính cơ thấp nhất
(I = I
đm
, n = n
min
, U
đk
= U
đkmin
)
Với dải điều chỉnh D = 10/1, nên tốc độ định mức ứng với đờng đặc tính
cơ thấp nhất là:
n
đmmin
=
300
10
3000
D
n
maxdm
==
(v/ph).
I
đm
= 9 (A).
U
cđmin
=
K
K.R.I)1(n
Đ\dmmindm
K ++
9506,0
23,95837
343,34.7384,14.9)23,95837.003,01(300
=
++
=
6 (V).
Tốc độ không tải lý tởng nhỏ nhất là:
Lớp K35IA
71
Đồ án tốt nghiệp Trang bị điện
n
0min
=
789,315
23,95837.003,01
95066,0.23,95837
1
U.K
mincd
=
+
=
+ K
(v/ph).
Vậy B
2
(I
đmmin
,n
đmmin
) = B
2
(9; 300).
A
2
(0; 315,789).
- Xác định điểm C
2
trên đờng đặc tính cơ thấp nhất.
Khi dòng điện I = 1,2I
đm
thì khâu ngắt dòng bắt đầu tham gia ứng với tốc
độ n
ngmin
trên đờng đặc tính cơ thấp nhất.
ở tốc độ thấp nhất khi đó bộ điều chỉnh tốc độ cha bão hoà và khâu ngắt
dòng tham gia:
Ta có phơng trình:
n = {[(U
cđ
- .n).K
n
- I.].K
I
.K
- I.R
}.K
Đ
Trong đó:
U
cđ
= U
cđmin
= 0,95066(V) ; R
= 14,7384()
K = 95837,23 ; K
I
= 0,5
= 0,003 ; K
= 58,235
I = 1,5I
đm
= 13,5(A) ; K
Đ
= 34,343
= 0,179
n
ngmin
=
23,95837.003,01
343,34.7384,14.5,13343,34.5,0.179,0.5,1323,95837.95066,0
+
= 291,96(v/ph).
Vậy điểm C
2
(13,5; 291,96)
- Điểm D
2
(n
bhmin
; I
bhmin
) trên đồ thị đợc xác định.
Khi tốc độ nhỏ thì bộ điều chỉnh tốc độ bão hoà khi đó chỉ có mình khâu
ngắt dòng tác động.
Ta có: U
bh
= (U
cđmin
- .n
bhmin
).K
n
n
bhmin
=
n
n
.K
UK.U
bhmincd
Trong đó:
U
bh
= 13(V) ; K
n
= 95,84
U
cđmin
= 0,95066(V) ; = 0,003
Lớp K35IA
72
1+.K 1+.K
U
cđ
.K
.K
I
.K
.K
Đ
+ R
\
.K
Đ
n =
.I
\
-
Đồ án tốt nghiệp Trang bị điện
n
bhmin
=
( )
ph/v67,271
003,0.84,95
1384,95.95066,0
=
Mặt khác khi khâu ngắt dòng và đầu ra của khâu điều chỉnh bão hoà ta có
phơng trình:
n = [(U
bh
- .I).K
I
.K
- I.R
].K
Đ
= U
bh
.K
I
.K
.K
Đ
- I(.K
I
.K
.K
Đ
+ R
.K
Đ
)
I
bhmin
=
ĐĐI
minbhĐIbh
K.RK.K.K.
nK.K.K.U
u
+
Trong đó:
U
bh
= 13(V) ; R
= 14,7384()
K
I
= 0,5 ; K
= 58,235
K
Đ
= 34,343 ; = 0,179
I
bhmin
=
343,34.7384,14343,34.235,58.5,0.179,0
67,271343,34.235,58.5,0.13
+
I
bhmin
= 18,57(A)
Vậy điểm D
2
(18,57; 271,67)
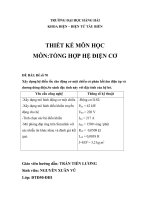
Vậy đờng đặc tính tĩnh của hệ thống là:
n(v/p)
0
3015,8
9 13,5 17,75 22 22,5
315,789
B
1
C
1
D
1
A
1
E
D
2
A
2
B
2
C
2
I(A)
Lớp K35IA
73
Đồ án tốt nghiệp Trang bị điện
phần v
xét ổn định và hiệu chỉnh hệ
thống
Lớp K35IA
74
Đồ án tốt nghiệp Trang bị điện
Đ5-1: XéT ổn ĐịNH hệ thống
I. Khái quát chung
Trong quá trình làm việc do nhiễu loạn ở bên ngoài mà hệ thống đang
làm việc có thể mất cân bằng so với định mức. Tính ổn định của hệ thống có thể
quay lại trạng thái ban đầu sau một thời gian. Do đó sau khi hệ thống đợc thiết
kế ta cần xét ổn định và phân tích chất lợng hệ thống sau đó hiệu chỉnh để hệ
thống làm việc tối u.
Chất lợng của hệ thống điều khiển tự động đợc thể hiện trong trạng thái
động và trạng thái tĩnh.
- Trạng thái tĩnh yêu cầu quan trọng nhất là độ chính xác điều chỉnh.
- Trạng thái động thì các yêu cầu về ổn định và các chỉ tiêu về chất lợng
động nh:
+) Độ quá điều chỉnh.
+) Tốc độ quá điều chỉnh.
+) Thời gian điều chỉnh.
+) Số lần dao động.
ở các hệ điều chỉnh tự động, cấu trúc mạch điều chỉnh và thông số của
các bộ điều khiển có ảnh hởng lớn đến chất lợng của hệ vì vậy khi thiết kế ta
phải thực hiện các bài toán nhằm đáp ứng các yêu cầu đặt ra.
Có nhiều cách hiệu chỉnh hệ thống, nhng ở dây ta hiệu chỉnh hệ thống
theo phơng pháp modul tối u đây là phơng pháp hiệu chỉnh gần đúng
Nội dung phơng pháp nh sau:
II. Thành lập sơ đồ cấu trúc và xây dựng hàm truyền của hệ
thống
Xét cho đoạn mạch tĩnh chỉ có mạch vòng tốc độ tham gia.
Sơ đồ cấu trúc nh sau:
Lớp K35IA
75
u
cđ
n
w
w
w
I
w
Đ
W
ph
(-)
Đồ án tốt nghiệp Trang bị điện
Trong đó:
W
n
= K
n
= 95,84
W
I
= K
I
= 0,5
W
=
1P.T
K
+
W
Đ
=
1P.Tp.T.T
K
M
2
MƯ
Đ
++
W
ph
=
Từ sơ đồ cấu trúc ta có hàm truyền của hệ thống nh sau:
W
HT
=
ĐI
ĐI
W.W.W.W.
W.W.W.W
1 +
1PTPT.T
K
.
1P.T
K
.K.K.1
1P.TPT.T
K
.
1PT
K
K.K
W
M
2
MƯ
Đ
In
M
2
MƯ
Đ
I
HT
+++
+
+++
=
n
=
ĐIM
2
ƯM
3
MƯ
ĐI
KKKK.1P)TT(P)TT(TPTTT
KKKK
n
n
++++++
Ta có phơng trình trạng thái:
B(P)=
ĐiMƯMMƯ
KKKK.P)TT(P)TT(TPTTT
2
3
1++++++
= a
0
P
3
+ a
1
P
2
+ a
2
P + a
3
Trong đó:
T
=
00333,0
50.3.2
1
mf2
1
==
(s)
T
M
=
ME
2
K.K.375
RGD
(s)
Với: K
E
=
0291,0
K
1
Đ
=
K
M
= 9,55.K
E
= 9,55.0,0291 = 0,278
Suy ra T
M
2184,0
278,0.0291,0.375
7384,14.045,0
==
T
Ư
=
03473,0
7384,14
512,0
R
L
Ư
==
U
(s)
Lớp K35IA
76
Đồ án tốt nghiệp Trang bị điện
III. Xét ổn định
Ta xét ổn định cho hệ thống theo tiêu chuẩn Raox
Muốn vậy thì phải thành lập bảng Raox, nó có dạng tổng quát nh sau:
a
0
a
2
a
4
a
1
a
3
b
0
b
2
b
1
Với :
a
0
= T
T
M
T
Ư
= 2,5281.10
-5
(s)
a
1
= T
M
(T
+T
Ư
) = 0,00831 (s)
a
2
= T
+T
M
= 0,22173 (s)
a
3
= 1 +
ĐI
KKKK.
n
= 576,0298 (s)
b
0
=
1
3021
1
31
20
a
aaaa
a
aa
aa
=
=
00831,0
10.0298,576.5281,222173,0.00831,0
5
= -1,5306
Ta thấy trên cột thứ nhất của bảng Raox có một số hạng b
0
= -1,5306 < 0
nên hệ thống không ổn định do vậy ta tiến hành hiệu chỉnh hệ thống.
Lớp K35IA
77
Đồ án tốt nghiệp Trang bị điện
Đ5.2: Hiệu chỉnh hệ thống
Trong quá trình thiết kế ta chỉ quan tâm tới hệ số khuyếch đại của mạch
khuyếch đại trung gian mà cha quan tâm tới tính ổn định của hệ thống. Vì vậy
để hệ thống ổn định và nâng cao chất lợng của hệ thống ta sẽ hiệu chỉnh lại
mạch vòng dòng điện và mạch vòng tốc độ.
1. Sơ đồ cấu trúc phân cấp của hệ thống.
- Hàm truyền chuẩn theo phơng pháp modul tối u (hệ kín):
22
)p(K
p2p21
1
W
++
=
- Hàm truyền hiệu chỉnh chuẩn có dạng:
)p1(p2.W
1
W
0
hc
+
=
- Hàm truyền hiệu chỉnh của mạch vòng phản hồi dòng điện:
)p1(p2.W
1
W
I0
hcI
+
=
- Hàm truyền hiệu chỉnh của mạch vòng phản hồi tốc độ:
)p(p.W
W
n
hcn
+
=
12
1
0
2. Hàm truyền của hệ thống hiệu chỉnh dòng điện.
- Hàm truyền hiệu chỉnh của mạch vòng phản hồi dòng điện có dạng:
)p(p.W
W
I
hcI
+
=
12
1
0
Trong đó:
W
0I
= W
.W
I
Lớp K35IA
78
W
I
(-)
(-)
u
cđ
W
hcn
W
W
n
n
W
hcI
W
0I
W
0n
Đồ án tốt nghiệp Trang bị điện
mà W
I
=
)p.T1(R
1
Ư
+
U
=
)p.3473,01(7384,14
1
+
W
=
1p.T
K
+
=
1p.00333,0
235,58
+
Suy ra W
0I
=
)p.3473,01).(1p.00333,0(
95124,3
++
Vậy hàm truyền chuẩn của mạch hiệu chỉnh dòng điện là:
)p1(p2.W
1
W
I0
hcI
+
=
=
)p1(p2.95124,3
)p.3473,01)(1p.00333,0(
+
++
Chọn = 0,00333(s) đợc:
W
hcI
=
)p00333,01(p.00333,0.2.95124,3
)p.3473,01)(1p.00333,0(
+
++
=
p.026315,0
1p.3473,0 +
=
p
1p.3473,0
.0011,38
+
=
p
1p.3473,0
.K
+
Đây là hàm truyền của bộ điều khiển tỷ lệ - tích phân. Ta có mạch điện t-
ơng đơng nh sau:
- Hàm truyền của mạch: W =
pCR
1pCR
R
p.C
1
R
21
22
1
2
2
+
=
+
Với
=
=
026315,0C.R
3473,0C.R
21
22
Chọn C
2
= 1àF = 10
-6
(F)
Suy ra
==
6
1
10
026315,0
R
26315 () = 26,315(K).
R
2
=
=
6
10
3473,0
374300() = 347,3()
3. Hàm truyền của hệ thống hiệu chỉnh tốc độ.
Lớp K35IA
79
u
v
A
R
1
R
2
C
2
u
ra
Đồ án tốt nghiệp Trang bị điện
- Hàm truyền hiệu chỉnh của mạch vòng phản hồi tốc độ có dạng:
)p(p.W
W
n
hcn
+
=
12
1
0
Từ hàm truyền tối u của mạch vòng phản hồi dòng điện là:
22
I\t
p2p21
1
W
++
=
Với = 0,00333(s) đã chọn suy ra
22
I\t
p)00333,0(2p00333,0.21
1
W
++
=
Để thuận lợi cho việc tính toán và chọn thiết bị hiệu chỉnh ta sử dụng điều
kiện gần đúng, với những hằng số thời gian nh:
< 0,001(s) thì ta bỏ qua.
0,001 < <0,1(s) thì =
i
> 0,1(s) thì giữ nguyên.
Nh vậy với điều kiện gần đúng trên thì (0,00333)
2
<< 0,001 nên ta bỏ qua
và kết quả là:
W
tI
=
1p.00666,0
1
+
Hàm truyền của mạch vòng tốc độ là:
W
0n
= W
tI
.W
n
Với W
n
=
p.045,0
25,104
p.045,0
278,0.375
p.GD
K.375
2
M
==
Suy ra W
0n
=
p.045,0
25,104
.
1p.00666,0
1
+
=
)1p.00666,0(p.045,0
25,104
+
Và ta có hàm truyền hiệu chỉnh:
)p1(p2.W
1
W
n0
hcn
+
=
=
)p1(p5,208
)1p.00666,0(p.045,0
+
+
=
)1p(.5,208
)1p.00666,0.(045,0
+
+
.
Chọn =0,00666(s) thay vào biểu thức ta đợc:
Lớp K35IA
80
Đồ án tốt nghiệp Trang bị điện
W
hcn
=
3886,1
045,0
)1p00666,0(00666,0.5,208
)1p.00666,0.(045,0
=
+
+
.
= 0,033 = K
Đây là hàm truyền của khâu tỷ lệ và ta có mạch điện tơng đơng:
K =
033,0
R
R
1
2
=
Chọn R
1
= 20() suy ra R
2
= 0,66()
Nh vậy khi ta đa hàm hiệu chỉnh vào hệ thống cũng nh đa mạch điện hiệu
chỉnh vào mạch điều khiển làm cho tính ổn định của hệ thông tăng cao đảm bảo
đợc các yêu cầu mà hệ thống đặt ra.
Lớp K35IA
81
R
2
A
R
1
u
vào
u
ra
§å ¸n tèt nghiÖp Trang bÞ ®iÖn
phÇn VI.
ThuyÕt minh s¬ ®å
nguyªn lý
Líp K35IA
82
Đồ án tốt nghiệp Trang bị điện
I. Nguyên lý chung:
Sơ đồ nguyên lý hệ thống truyền động Thyristor - Động cơ động bao gồm
các thiết bị sau:
1. Máy biến áp động lực:
Làm nhiệm vụ cung cấp điện áp thích hợp cho bộ chỉnh lu ba pha hình
tia, có tác dụng biến đổi điện áp và tạo ra số pha phù hợp với yêu cầu của bộ
biến đổi.
2. áptômát AB:
Dùng để bảo vệ cắt mạch động lực khi có sự cố quá tải hoặc ngắn mạch.
3. Cầu dao CD:
Làm nhiệm vụ cách ly khi sửa chữa hệ thống.
4. Khởi động từ:
Làm nhiệm vụ đóng cắt mạch khi đa hệ thống vào sử dụng.
5. Bộ chỉnh lu 3 pha hình tia:
Làm nhiệm vụ biến đổi điện áp xoay chiều thành một chiều cung cấp cho
động cơ. Diod D
0
dùng để duy trì liên tục dòng phụ tải.
6. Máy phát tốc:
Làm nhiệm vụ lấy tín hiệu để duy trì và ổn định tốc độ đặt của động cơ
nâng cao đặc tính cơ thông qua mạch điều khiển.
7. Động cơ một chiều kích từ độc lập:
Dùng để truyền động quay cho hệ thống và là đối tợng điều chỉnh.
8. Bộ khuyếch đại trung gian:
Làm nhiệm vụ tổng hợp và khuyếch đại tín hiệu điều khiển, làm tăng độ
nhạy, độ ổn định, mở rộng phạm vi điều chỉnh của hệ thống. Bộ khuyếch đại
này đợc xây dựng trên cơ sở của các vi mạch khuyếch đại thuật toán IC mA
741.
9. Khối đồng bộ:
Làm nhiệm vụ tạo ra điện áp tựa nhằm đa vào so sánh với điện áp điều
khiển để định ra thời điểm phát xung.
10.Khối so sánh:
Lớp K35IA
83
Đồ án tốt nghiệp Trang bị điện
Khối này có nhiệm vụ tạo ra xung điều khiển với góc mở phù hợp với
yêu cầu của mạch động lực.
11. Khối sửa xung:
Làm nhiệm vụ sửa lại hình dáng xung sao cho có đầy đủ các thông số
của xung điều khiển Thyristor.
12. Khối khuyếch đại xung và cách ly:
Làm nhiệm vụ khuyếch đại công suất của xung ra sao cho nó có đầy đủ
tính chất để mở đợc tiếp giáp của Thyristor tại thời điểm cần thiết. Đồng thời nó
cũng làm nhiệm vụ cách ly giữa mạch điều khiển và mạch động lực, đảm bảo an
toàn về điện.
13. Khâu ngắt dòng:
Hạn chế phụ tải khi dòng tải vợt quá trị số cho phép.
II- Nguyên lý khởi động
- Đóng điện áp nguồn nuôi cho các bộ chỉnh lu cung cấp kích từ cho đông
cơ.
- Đóng áptômat AB thì mach động lực và mạch điều khiển có điện. Khi
có tín hiệu điều khiển đến các Thyristor, làm cho các Thyristor mở. Khi đó
động cơ đợc cung cấp nguồn và làm việc. Quá trình khởi động động cơbắt đầu.
III- Nguyên lý điều chỉnh tốc độ:
Ta điều chỉnh tốc độ bằng cách thay đổi điện áp đặt vào phần ứng động
cơ. Với bộ biến đổi van động cơ, để thay đổi điện áp đặt vào phần ứng động cơ
ta thay đổi thời điểm phát xung, tức là thay đổi U
cđ
. Khi thay đổi điện áp chủ
đạo làm cho góc mở thay đổi, khoảng dẫn dòng thay đổi dẫn đến điện áp ra
thay đổi, làm cho tốc độ động cơ thay đổi.
IV- Nguyên lý dừng động cơ:
- Cắt mạch điều khiển và mạch động lực ra khỏi lới điện, đồng thời đóng
điện trở hãm vào mạch phần ứng động cơ, tiến hành hãm động năng.
- Trong quá trình hãm động năng không đợc ngắt kích từ của động cơ.
Lớp K35IA
84
Đồ án tốt nghiệp Trang bị điện
mục lục
Danh mục
Phần I
Tìm hiểu quá trình công nghệ máy mài
Chơng I. Khái niệm chung về mài
I.1.1. Quá trình công nghệ mài
I.1.2 Các chế độ trong quá trình cắt
Chơng II. Các chỉ tiêu kỹ thuật
Phần II
Thiết kế mạch
Chơng I. Phân tích và lựa chọn phơng án truyền động
II.1.1. Mục đích - ý nghĩa
II.1.2. Phân tích và lựa chọn phơng án truyền động
II.1.3. Xây dựng và chọn mạch động lực
II.1.4. Chọn chế độ hãm cho động cơ
Chơng II. Thiết kế mạch điều khiển
II.2.1 Mục đích - ý nghĩa
II.2.2. Sơ đồ khối và chức năng của chúng
II.2.3. Khai triển sơ đồ khối
Phần III.
Tính chọn thiết bị
III.1. Mục đích - ý nghĩa
III.2. Chọn thiết bị mạch động lực
III.3. Chọn thiết bị mạch điều khiển
Phần IV
Xây dựng đặc tính tĩnh
IV. 1. Khái niệm
IV.2. Xây dựng đặc tính tĩnh
Phần V
Xét ổn định và hiệu chỉnh hệ thống
V.I. Chế độ ổn định tĩnh
V.2. Chế độ ổn định động
V.3. Hiệu chỉnh hệ thống
Phần VI
Thuyết minh sơ đồ nguyên lý
trang
Lớp K35IA
85
Đồ án tốt nghiệp Trang bị điện
tài liệu tham khảo
[1]. Bùi Quốc Khánh, Nguyễn Văn Liễn, Phạm Quốc Hải, Dơng Văn
Nghi " Điều chỉnh tự động truyền động điện". NXB KHKT Hà Nội 1996.
[2]. PTS Võ Quang Nạp, Trần Xuân Minh " Kỹ thuật biến đổi" Thái
Nguyên.
[3]. Nguyễn Bính "Điện tử công suất". NXB KHKT Hà Nội 1996.
[4]. PTS Phạm Duy Tân, Nguyễn Văn Thịnh "Giáo trình cung cấp
điện". Thái nguyên.
[5]. Phạm Công Ngô " Lý thuyết điều khiển tự động". NXB ĐHBK
Hà Nội 1996.
Lớp K35IA
86