Giáo án - Bài giảng: TÀI LIỆU LẬP TRÌNH ĐIỀU KHIỂN PLC
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.76 MB, 73 trang )
Câu 1. Hãy giải thích tại sao PLC lại được sử dụng rộng rãi trong các hệ
thống điểu khiên quá trình (Điều khiển công nghiệp)?
3
điểm
Đáp án: Vì PLC có những Ưu điểm như sau:
-Tính linh hoạt: có thể sử dụng một bộ điều khiển cho nhiều đối tượng khác
nhau với các thuât toán điều khiển khác nhau.
0.4
- Dễ dàng thiết kê và thay đổi logic điều khiển: với các hệ thống điểu khiển
sử dụng rơle, khi thay đổi logic điều khiển cần có nhiều thời gian để nối lại
dây cho các thiết bị và panel điều khiển, và đó là một công việc phức tạp. với
hệ thống điều khiển sử dụng PLC, thay đổi logic điều khiển bằng cách thay
đổi chương trình thông qua thiết bị lập trình và ngôn ngữ lập Ưình chuyên
dùng. Điều đó làm giảm đáng kể thời gian thiết kế hệ thông.
0.5
- Tôi Ưu logic điều khiển: được sự hỗ trỢ của các công cụ mô phỏng và gỡ
rối trực tuyến và Ưực quan làm cho hệ thống được thiết kê có tính tôi Ưu hơn.
0.4
- Tốc đô thưc hiên nhanh. 0.4
- Nhỏ, gọn và giá thành thấp. 0.4
- Khả năng bảo mật hệ thống khi sử dụng mã khóa. 0.4
- Khả năng mở rộng và nâng cấp hệ thống: do được chê tạo dưói dạng các
modul được chuẩn hóa cho phép ghép nối các thành phần không chỉ của một
nhà sản xuất. Đây là một yêu cầu không thể thiếu trong các hệ thống điều
khiển hiên đai.
0.5
Câu 2. Hãy trình bày cấu trúc và nguyên lý hoạt động cơ bản của PLC? 3
điểm
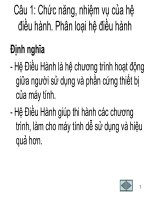
Đáp án: PLC là thiết bi điều khiển dưa trên bô vi xử lv. các thành phần cơ
bản của nó gồm (vẽ hình):
- Khối xử lý trung tâm (Central Processing Unit - CPU): Đây là bộ não của
hệ thông, có chức năng điều khiển và giám sát toàn bộ hoạt động của hệ
thống bằng cách thực hiện tuần tự các lệnh trong bộ nhớ. Bên trong CPU gồm
các mạch điều khiển, khối thuật toán và logic, các thanh ghi chuyên dụng và
thanh ghi dữ liệu tạm thời. Hoạt động cơ bản của CPU là: đọc lẳn lượt tùhg
0.7
lệnh từ bộ nhớ, giải mã lệnh, phát tín hiệu điều khiển các thành phần khác và
xử lý dữ liệu.
Khôi nguồn
CPU
/-
\ -
Bộ nhớ trong
7X
X /
/V Bus hệ thống
Khôi ghép nối vào
V
Khối ghép nối ra
-BỘ nhớ trong (Internal Memory): Bộ nhớ trong là loại bộ nhớ bán dẫn, có 0.7
ưu điểm là tương thích về kích thước và mức logic với các thành phần khác
của hệ thống; tốc độ truy nhập cao; năng lượng tiêu thụ thấp. PLC sử dụng
các loại bộ nhớ sau đây:
-ROM hệ thống: chứa chương trình hệ thống (hệ điều hành) và dữ liệu
cô định được CPU sử dụng. Dữ liệu trong ROM được nhà sản xuất nạp vào
và không thay đổi trong suốt quá trình sử dụng sau này.
-RAM chứa chương trình và dữ liệu của người sử dụng
-RAM làm bộ đệm cho các tín hiệu vào/ra và cho các đối tượng khác
(bộ đếm, định thời )
-EEPROM để lưu cố định chương tình của người sử dụng cũng như
những dữ liệu cần thiết mà người dùng lựa chọn.
Một phần hoặc toàn bộ RAM có thể được nuôi bằng tụ điện hoặc
nguồn pin bên ngoài. Chương trình của người sử dụng được nạp vào RAM,
sau đó tư động nạp vào EPPROM đề cổ thề lưu trữ vĩnh cửu.
_______________
-Bus hệ thống (System Bus): Bus hệ thống phục vụ cho việc truyền thông 0.7
tin giữa các thành phần trong hệ thống. Thông tin được truyền trong hệ thống
dưới dạng tín hiệu nhị phân. Bus hệ thống gồm có các bus sau:
______________
-Bus dữ liệu: bus dữ liệu là bus hai chiều, dùng để truyền tải dữ liệu
giữa các thành phần trong hệ thống.
-Bus địa chỉ: bus địa chỉ là bus một chiều, khi CPU muốn truy cập đến
một thành phần nào đó thì nó cung cấp địa chỉ của thành phần đó lên bus này,
tín hiệu địa chỉ qua bộ giải mã địa chỉ kích hoạt thành phần tương ứng.
-Bus điều khiển: CPU sử dụng bus điều khiển để cung cấp các tín hiệu
điều khiển và nhận các tín hiệu thông báo từ các thành phần.
Khối ghép nối vào/ra (Input/Output Interface):
- Khối ghép nối vào có các chức năng sau: nhận tín hiệu vào từ các thiết bị
nhập (ví dụ các cảm biến, chuyển mạch ); biến đổi các tín hiệu vào thành
mức điện áp một chiều; thực hiện cách ly tĩnh điện bằng bộ ghép nối quang;
tạo tín hiệu logic chuẩn đưa đến các mạch trong PLC.
- Khối ghép nối ra hoạt động tương tự khối ghép nối vào: tín hiệu một chiều
chuẩn từ trong PLC qua các mạch biến đổi đến các đầu ra vật lý, cho phép
điều khiển trực tiếp các tải một chiều và xoay chiều công suất nhỏ với các
mức điện áp khác nhau. BỘ ghép nối quang cũng được sử dụng để tránh cho
các mạch bên trong PLC khỏi ảnh hưởng của các thiết bị bên ngoài.
0.7
-Khối nguổn (Power Supply): Khối nguồn có chức năng biến đổi nguồn
điện áp bên ngoài thành các mức điện áp phù hỢp cung cấp cho các thành phần
củaPLC.
0.2
Câu 3. Trình bày cáu trúc và sơ đồ nguyên lý mạch cơ bản của các cổng
vào của PLC?
3
điểm
Đáp án: Khối ghép nối vào có các chức năng sau: nhận tín hiệu vào từ các
thiết bị nhập (ví dụ các cảm biến, chuyển mạch ); biến đổi các tín hiệu vào
thành mức điện áp một chiều; thực hiện cách ly tính điện bằng bộ ghép nối
quang; tạo tín hiệu logic chuẩn đưa đến các mạch ttong PLC.
Do đó mạch ghép nối vào có các khối sau:
1.5
-Bộ biến đổi
-Mạch cách ly tĩnh điện
-Mạch logic
Sơ đồ mạch ghép nối vào:
Khối đầu tiên nhận tín hiệu từ các cảm biến, chuyển mạch Nêu tín
hiệu vào là điện áp xoay chiều thì bộ biến đổi chỉnh lưu thành điện áp một
chiều có giá trị nhỏ. Đầu ra của bộ biến đổi không được đưa ưực tiếp đến
các mạch trong PLC nhằm tránh cho nó khỏi ảnh hưởng của mạch ngoài. Ví
dụ trong trường hỢp bộ biến đổi làm việc không chính xác, thì điện áp xoay
chiều lớn được đưa đến PLC và làm hỏng hệ thống, bởi vì hầu hết các mạch
xử lý chỉ làm việc với điện áp 5V một chiều. Do vậy phải có mạch cách ly để
bảo vệ các mạch Ưong PLC. Mạch cách ly thường sử dụng bộ ghép nối
quang, Tín hiệu được chuẩn hóa về mức logic để đưa vào hệ thống, sơ đồ
nguyên lý của mạch ghép nối vào:
1.5
Câu 4. Thê nào là vòng quét? Hãy trình bày chi tiết các giai đoạn làm việc
của PLC thông qua vòng quét?
3
điểm
Đáp án: Chức năng của CPU là thực hiện lặp đi lặp lại một chuỗi công
việc. Sự thực hiện các công việc có tính tuần hoàn này gọi là vòng quét (Scan
cycle). Trong mỗi vòng quét, CPU thực hiện hầu hết hoặc toàn bộ các công
việc sau:
- Đọc các đầu vào
- Thực hiện chương trình
- x ử lý các yêu cầu truyền thông
- Thực hiện tự chẩn đoán
- Viết các đầu ra
Có thể biểu diễn vòng quét của CPU như sau:
Viết các đầu z " ' ' s . DOC các đáu vào
ra / ^
í J
Tư chẩn Y J Thực hiện chương trình
đoán
_____
/
x ử lý các yêu cầu truyền
thông
1.5
Đọc các đầu vào số. Mỗi vòng quét bắt đầu bằng việc đọc giá trị hiện
thời của các đầu vào số và lưu các giá trị này ở bộ đệm vào. CPU quản lý bộ
đệm dành cho các đẩu vào sô theo từng byte. Nêu CPU hoặc module mở rộng
không có đủ một đầu vào vật lý cho mỗi bit của byte nào đó, thì không thể gán
lại các bit này cho các module tiếp theo cũng như không thể sử dụng chúng
trong chương trình. Tại thời điểm bắt đắu mỗi vòng quét, CPU gán các bit
không sử dụng này bằng 0. Trong trường hỢp các module mở rộng không
được lắp đặt, thì có thể sử dụng các bit đầu vào mở rộng này trong chương
0.5
tình như các bit nhớ thông thường.
Thực hiện chương trình. Trong giai đoạn thực hiện chương trình, các
lệnh được thực hiện lần lượt từ lệnh đầu tiên đến lệnh cuối cùng. Các lệnh
vào/ra trực tiếp cho phép truy nhập trực tiếp đến các đầu vào/ra vật lý trong
khi thực hiện chương trình hoặc trình xử lý ngắt. Nêu chương trình có sử
dụng ngắt, thì tình xử lý ngắt chỉ đƯỢc thực hiện khi sự kiện ngắt tương ứng
xuất hiện (sự kiện ngắt có thể xuất hiện tại bất kỳ thời điểm nào trong vòng
quét).
0.4
xử ỉý các yêu cầu truyền thông. Trong giai đoạn này, CPU sẽ xử lý bất kỳ
yêu cẩu nào nhận được từ cổng truyền thông.
0.2
Thực hiện tự chẩn đoán. Trong giai đoạn này, CPU thực hiện kiểm tra phần
lõi của nó (chương trình hệ thống), các module vào/ra, bộ nhớ chương trình
người dùng (chỉ ở chê độ RUN).
0.2
Ghi các đẩu ra số. Tại thời điểm kết thúc mỗi vòng quét, CPU ghi dữ liệu
lưu trong bộ đệm tới các đầu ra vật lý.
0.2
Câu 5. Trình bày cấu trúc và sơ đồ nguyên lý mạch cơ bản của các cổng
ra cùa PLC?
________________________________________________________
Đáp án: Khối ghép nối ra hoạt động tương tự khối ghép nổi vào: tín hiệu một
chiều chuẩn từ trong PLC qua các mạch biến đổi đến các đầu ra vật lý, cho
phép điều khiển trực tiếp các tải một chiều và xoay chiều công suất nhỏ với
các mức điện áp khác nhau. Bộ ghép nối quang cũng được sử dụng để tránh
cho các mạch bên trong PLC khỏi ảnh hưởng của các thiết bị bên ngoài.
3 điểm
1.5
Từ bộ đệm
Mạch logic
Mạch cách
ly ứnh điện
Đầu ra
Mạch giao tiếp sử dụng rơle, tranzitor, triac cho phép nối trực tiếp PLC với
tải công suất nhỏ. Khi nổi đầu ra với tải công suất lớn cắn cổ mạch cống suất
bẽn ngoài.
___________________________________________________________
Mạch giao tiếp kiểu rơle: tín hiệu từ PLC được sử dụng để điều khiển
rơle, có khả năng chuyển mạch dòng điện lớn trong mạch tải. Ngoài ra rơle
còn có chức năng cách ly PLC với mạch ngoài. Rơle có khả năng chịu quá tải
trong thời gian ngắn. Tuy nhiên, nhược điểm của rơle là tốc độ chuyển mạch
chậm. Mạch rơle được sử dụng cho cả tải một chiều và xoay chiều.
Từ mạch_
logic
I
I
PLÓ
I
-wv-
Đầu ra
1.5
Mạch giao tiếp kiểu tranzitor: tín hiệu từ PLC điều khiển tranzitor làm
việc ở chế độ khóa. Ưu điểm của tranzitor là tốc độ chuyển mạch nhanh.
Nhưng dễ bị hư hỏng do quá tải hoặc khi chuyển từ trạng thái thông sang
khóa. Do đó phải sử dụng các mạch bảo vệ. Mạch tranzitor chỉ dùng cho điện
áp một chiều.
Từ mạch
logic
LED 1
I
Ỷ c
1
1
1
A A A 1
p l c !
Đầu ra
Mạch giao tiếp kiểu triac: chuyên dùng với mạch điện xoay chiều, có
tốc độ chuyển mạch nhanh. Nhưng dễ bị hư hỏng do quá tải, nên phải có
mạch bảo vệ.
Như vậy, mặc dù các mạch bẽn trong PLC làm việc với tín hiệu chuẩn 5V
một chiểu, nhưng nhờ có mạch ghép nối ra nên có thể nối trực tiếp PLC với
phụ tải một chiều hoặc xoay chiều có các mức điện áp khác nhau.
__________
Câu 6. Hãy trình bày các vùng nhớ cơ bản của PLC S7-200? 3
điểm
Đáp án: Các vùng nhớ cơ bản của PLC S7 như sau:
-Vùng nhớ đệm vào I: CPU lấy mẫu các đẩu vào vật lý tại thời điểm bắt
đầu của mỗi vòng quét và ghi các giá trị này ở vùng đệm vào. Chương trình có
thể truy nhập vùng đệm vào theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ đệm ra Q: Tại thời điểm kết thúc mỗi vòng quét, CPU sao chép
các giá trị được lưu trong vùng đệm ra đến các đầu ra vật lý. Chương trình có
thể truy nhập vùng đệm ra theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ V: Có thể sử dụng vùng nhớ V để lưu các kết quả trung gian của
các thao tác đang được thực hiện ữong chương trình. Cũng có thể sử dụng
vùng nhớ V để lưu các dữ liệu khác có liên quan đến quá trình điều khiển. Có
thể truy nhập vùng nhớ V theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ bit M: Có thể sử dụng vùng nhớ bit M như các rơle điều khiển
bên trong. Mặc dù có tên là vùng nhớ bit nhưng có thể truy nhập theo bit, byte,
từ, hoặc từ kép.
0.2
-Vùng nhớ s (Sequence Control Relay - SCR): Các bit thuộc vùng nhớ s được
sử dụng để tổ chức các hoạt động theo một trình tự nào đó của máy móc thành
các đoạn chương tình tương đương. Các bit nhớ
s được gọi là các rơle điều
khiển trình tự. Nó cho phép phân đoạn chương trình về mặt logic. Có thể truy
nhập vùng nhớ s theo bit, byte, từ, hoặc từ kép.
0.3
-Vùng nhớ đặc biệt SM: Các bit nhớ đặc biệt SM được sử dụng để giao tiếp
giữa CPU và chương trình của người sử dụng. Chương trình có thể sử dụng
các bit này để lựa chọn và điều khiển một sô chức năng đặc biệt của CPU S7-
200. Có thể truy nhập dữ liệu trong vùng nhớ này theo bit, byte, từ, hoặc từ
kép.
0.3
-Vùng nhớ của các bộ định thòi T: Trong CPU S7-200, các bộ định thời có 0.2
chức năng đếm thời gian. Các bộ định thời S7-200 có các độ phân giải lms,
10ms, lOOms.
-Vùng nhớ của các bộ đếm C: Trong CPU S7-200, các bộ đếm có chức năng
đếm theo sườn dương của xung ở các đầu vào đếm. CPU cung cấp ba loại bộ
đếm: đếm tiến, đếm lùi, đếm cả tiến và lùi.
0.2
-Địa chỉ các đầu vào tương tự AI: PLC S7 biến đổi một giá trị tương tự
(như nhiệt độ hoặc điện áp) thành một giá trị sô có độ dài 16 bit. Việc đọc các
giá trị này bằng cách sử dụng địa chỉ gồm nhận dạng vùng nhớ (AI), kích
thước dữ liệu (W), địa chỉ byte đẩu tiên. Bởi vì các đắu vào tương tự là các từ
và luôn bắt đầu bằng các byte sô chẵn, nên địa chỉ byte là các số chẵn. Các giá
trị đầu vào tương tự là các giá trị chỉ đọc được (read-only).
0.3
-Địa chỉ các đầu ra tương tự AQ: S7-200 biến đổi một giá trị sô 16 bit thành
tín hiệu điện tỷ lệ với giá trị số. Việc ghi các giá trị này bằng cách sử dụng
địa chỉ gồm nhận dạng vùng nhớ (AQ), kích thước dữ liệu (W), địa chỉ byte
đầu tiên. Bởi vì các đầu ra tương tự là các từ và luôn bắt đắu bằng các byte sô
chẵn, nên địa chỉ byte là các sô chẵn. Các giá trị đắu ra tương tự là các giá trị
chỉ ghi được (write-only).
0.3
- Địa chỉ các bộ đếm tốc độ cao HC: Các bộ đếm tốc độ cao được thiết kê
để đêm các sự kiện có tốc độ rất cao không phụ thuộc vào vòng quét của
CPU. Bộ đếm tốc độ cao có một giá trị hiện thời là sô nguyên không dấu 32
bit. Truy nhập giá trị này bằng cách sử dụng địa chỉ như sau:
0.3
Câu 7. Hãy trình bày việc xác định các đầu vào/ra môdun CPU và mô đun
mở rộng của PLC S7-200?
3
điểm
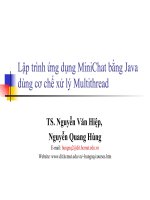
Các đầu vào/ra tích hỢp trên module CPU có các địa chỉ cô định. Có thể thêm
các đầu vào/ra bằng cách kết nối các module mở rộng về bên phải của CPU
để tạo thành một dãy các đẳu vào/ra. Địa chỉ của các vị trí trên module được
1.5
xác định bằng kiểu vào/ra và vị trí của module ưong dãy, và có liên hệ với địa
chỉ các module cùng kiểu trước đó. Các module mở rộng sô sử dụng bộ đệm
vào/ra theo từng byte. Điều này có nghĩa là nếu một module không có đủ 8 đắu
vào hoặc ra cho một byte trong bộ đệm, thì các bit chưa sử dụng trong byte đó
không thể gán cho các module tiếp theo trong dãy, cũng như không thể dùng
chúng trong chương trình. Đối với module vào, các bit chưa dùng này được xóa
về 0 khi CPU cập nhật đắu vào.
CPU 224
10.0
QO.O
10.1
Q0.1
10.2
Q0.2
10.3
Q0.3
10.4
Q0.4
10.5
Q0.5
10.6
00.6
-10:7
41/4Q
12.0
Q2.0
12.1
Q2.1
12.2
Q2.2
12.3
Q2.3
81
13.0
13.1
13.2
13.3
13.4
13.5
13.6
-Br?-
4AI/1AQ
AIWO AQW0
AIW2
AIW4
AIW6
8Q
03.0
03.1
Q3.2
03.3
03.4
03.5
Q3.6
-Q3*-
4AI/ 1AQ
AIW8 AQW4
AIW10
AIW12
AIW14
1.5
Q0.7
11.0
Ql.o
11.1
8. Hãy trình bày các phương pháp lập trình và nêu uti nhược điểm
'ì-3
C1M từng phương pháp trên?
11*5 — , , , A X ,
-
^ T
3
điểm
Cách lập trình cho S7 dựa trên ba phương pháp chính: 0.5
- Phương pháp liệt kê lệnh (Statement List - viết tắt là STL),
- Phương pháp hình thang (Ladder Logic - viết tắt là LAD),
- Phương pháp biểu đồ khối chức năng (Function Block Diagram - viết tắt là
FBD).
____________________________________________________________
-Phương pháp liệt kê lệnh: 1.0
Phương pháp liệt kê lệnh cho phép tạo ra các chương trình điểu khiển
bằng cách nhập mã gợi nhớ của lệnh. Nhìn chung, phương pháp liệt kê lệnh
phù hỢp cho những nhà lập trình chuyên nghiệp. Phương pháp STL cho phép
tạo ra các chương trình mà đỗi khi không thề viết được bằng các phương pháp
LAD hoặc FBD, bởi vì đó là các phương pháp đồ họa nên phải có một sô quy
tắc để vẽ và nối các phần tử cho đúng. Để lập trình bằng phương pháp STL
cần phải hiểu rõ phương thức sử dụng ngăn xếp logic, bởi vì các lệnh này can
thiệp vào các bit của ngăn xếp. Các thao tác can thiệp vào ngăn xếp tác động
đến bit đầu tiên hoặc bit đầu tiên và bit thứ hai của ngăn xếp. Giá trị mới có
thể ghi đè hoặc chèn vào bit đầu tiên của ngăn xếp. Khi giá trị mới chèn vào vị
trí bit đầu tiên thì các bit bị đẩy xuống một vị trí và bit cuối cùng sẽ bị mất.
Thao tác với hai bit đầu tiên
sẽ kéo các bit tiếp theo lên một vị trí.
Ngăn xếp logic là một vùng nhớ gồm có 9 bit liền nhau. Các lệnh chỉ
can thiệp đến bit đầu tiên và bit thứ hai của ngăn xếp.
so
Bit đầu tiên của ngăn xếp
SI
Bit thứ hai của ngăn xếp
S2
Bit thứ ba của ngăn xếp
S3
Bit thứ tư của ngăn xếp
S4
Bit thứ năm của ngăn xếp
S5
Bit thứ sáu của ngăn xếp
S6
Bit thứ bảy của ngăn xếp
S7
Bit thứ tám của ngăn xếp
S8
Bit thứ chín của ngăn xếp
-Phương pháp hình thang: 1.0
Phương pháp hình thang được sử dụng rộng rãi vì có tính trực quan, đơn giản.
Các phần tử trong LAD tương ứng với các phần tử của hệ thống điều khiển
rơle, đó là tiếp điểm, cuộn dây, hộp chức năng và mạng LAD.
Tiếp điểm “ 1 |~: tượng trưng cho tiếp điểm của rơle. Các tiếp điểm có
thể là thường mở hoặc thường đóng
Cuộn dây —( tượng trưng cho cuộn dây của rơle
Hộp (box): tượng trưng cho các hàm, làm việc khi có dòng điện chạy
đến hộp.
Mạng LAD: là đường nối các phần tử thành mạch hoàn thiện từ đường nguồn
bên trái, qua các tiếp điểm đến cuộn dây hoặc các hộp và về đường nguồn
bên phải.
-Phương pháp biểu đồ khối chức năng: 0.5
Phương pháp này sử dụng các khối hộp để biểu diễn các cổng logic (AND,
OR, NOT) và các hàm thực hiện các chức năng (định thời, đếm, toán học ).
Có các đường nối giữa các hộp để tạo thành mạch logic theo yêu cầu. Vì vậy,
phương pháp này tương tự như việc thiết kẽ mạch sổ.
Câu 9. Hãy trình bày ưng dụng PLC xây dựng h ệ thống điều khiển tự
động? trình bày kỹ hệ thống điểu khiển trình tự?
3
điểm
Khi bắt đầu xây dựng một hẹ thống điều khiển trên cơ sở ứng dụng PLC,
một câu hỏi đặt ra là phải thực hiện những công việc theo một quv trình như
thế nào?. Có thể đó không phải là một vấn đề lớn khi xây dụhg một hệ thống
đơn giản. Nhưng đối với những hệ thống phức tạp thì cần phải có một quy
trình thiết kế phù hỢp. Nó giúp cho người thiết kê kiểm soát được quá trình
thực hiện công việc của mình, từ sự mô tả chức năng và yêu cầu của hệ
thống cho đến việc lập chương trình điều khiển cho PLC. Trong chương này
sẽ đưa ra mô hình hệ thống điều khiển trình tự, đề cập đến phương pháp mô
tả chức năng hệ thống điều khiển trình tự và kỹ thuật lập trình điều khiển
trình tự ứng dụng PLC.
1.0
Một hệ thống điều khiển tự động bao gồm các thành phần chính sau:
- Phần điều khiển: phần điều khiển có chức năng tạo ra các lệnh điều
khiển cắn thiết tùy thuộc vào thông tin mà nó nhận được. Các thông tín này có
thể nhận được từ người điều khiển hoặc thông tin phản hồi từ phần chấp
hành thông qua các cảm biến.
- Phần chấp hành: đôi khi còn gọi là phần công suất, nhận lệnh từ phần
điều khiển để thực hiện điều khiển đổi tượng. Phần chấp hành có thể là các
động cơ điện, cuộn dây điện từ, rơle
Mô hình tổng quát của hệ thống điều khiển tự động như sau:
1.0
Hiệu
chỉnh
bằng tay1
Tác động Báo hiệu
Phần điều
khằển
Lệnh điều
khiển
Phản hồi
Phần chấp hành
Thông
báo trạng
thái
Hệ thống điều khiển logic là hệ thống điều khiển thực hiện các chức
năng logic chuyển mạch. Ta có thể mô tả hệ thống điều khiển logic dưới
dạng một mạch logic gồm các đắu vào và đầu ra như sau:
Các đầu vào Hệ thống điều Các đầu ra
Dựa theo mô hình này, có thể chia hệ thống điều khiển thành hai loại: 1.0
-Hệ thông điều khiển tổhỢp: là hệ thống điều khiển mà trạng thái của
các đầu ra chỉ phụ thuộc vào trạng thái của các đầu vào tại thời điểm đang
xét. Có thể biểu diễn hệ thống dưới dạng hàm logic:
Đầu ra = f(đầu vào)
-Hệ thống điều khiển trình tự: là hệ thống điều khiển mà trạng thái của
các đẩu ra không chỉ phụ thuộc vào trạng thái của các đầu vào tại thời điểm
đang xát mà còn phụ thuộc vào trạng thái trước đó của hệ thống. Biểu diễn
hệ thống bằng hàm logic:
Đẩu ra = f(đầu vào, trạng thái hệ thống)
Hệ điều khiển tổ hợp là trường hỢp riêng của hệ điều khiển trình tự,
khi sô trạng thái của hệ thống bằng 1. Hệ thống điều khiển trình tự là hệ
thống phổ biển trong thực tể. Đặc ương của hệ thống điều khiển trình tự là
sự thực hiện lặp đi lặp lại một chuôi các thao tác, tương ứng với một ưạng
thái hoạt động của hệ thống.
__________________________________________
Câu 10. Hãy trình bày kỹ qui trình thiết k ế h ệ thống điều khiển tuần
tư?
3
điểm
Thiết kế hệ thống điều khiển trình tự ứng dụng PLC gồm có hai nhiệm vụ là
thiết kế phần cứng và thiết kê chương trình điều khiển. Thiết kế chương
trình điều khiển chỉ là một phần trong toàn bộ quá trình thiết kế, nhưng là yếu
tô quan trọng vì nó tạo ra các tài liệu cần thiết giúp cho việc lập trình và gỡ
rối cũng như lập tài liệu hệ thống để lưu trữ sau này. Điều này đặc biệt có ý
nghĩa khi bảo trì và nâng cấp hệ thống.
1.0
Hình dưới đây biểu diễn quy trình tổng quát khi thiết kế hệ thống điều khiển
trình tự ứng dụng PLC. Phương pháp này cho phép triển khai, lắp đặt phần
cứng và thiết kế chương tình điều khiển được tiến hành độc lập và song
song. Nó cũng cho phép trao đổi thông tin bổ xung giữa các quá trình thiết kê
nhằm hoàn thiện hệ thống theo hướng tôi Ưu nhất. Đối với hệ thống điều
khiển đơn giản thì ít khi đòi hỏi sự hoạch định và thiết kế chương trình, bởi vì
không có nhiều sự liên kết logic giữa các phần trong chương trình. Đối với các
hệ thống phức tạp, cắn thiết kê chương trình có cấu trúc và theo một quy
trình xác định, điều đó làm cho quá trình được kiểm soát, ưánh nhẩm lẫn và
thiếu sót khi thiết kế chương trình, chương trình dễ đọc, hiệu chỉnh, bổ xung,
và lập tài liệu thiết kế.Trong quy trình thiết kế hệ thống điều khiển, một vấn
đề quan trọng là phải mô tả hệ thông điều khiển một cách chính xác, khoa
học, và được chuẩn hóa. Ngoài ra, cách mô tả hệ thống phải tạo điều kiện
thuận lợi cho việc thiết kê chương ưình điều khiển.
1.0
Xác định yêu cắu và
chức năng rủa hệ
thông
1.0
Thiết kế
phần cứng
Xác định yêu cầu về bộ
xử lý, bộ nhớ, vào/ra và
các chức năng chuyên
dùng ỉ —
Thiết kế
chương trình
Lựa chọn và lắp
đặt phần cứng
1
r
Lập tài 1
thuât—
iệu kỹ
Yêu cầu đối với quá
trình điều khiển
Chia quá trình điều
khiển thành các khối
-chát-
năng
Mô tả chức
năng các khối
Lập trình cho các
khối chức năng
Liên kết chương trình,
mô phỏng và hiệu
chỉnh
ĩ
Lập tài liệu
Chạy thử trên thiết bị, hiệu chỉnh và hoàn thiện hệ
thống
Câu 11. Hãy trình bảy các phương pháp mô tả hệ thống điều khiển?
___
3
Trình bày chi tiế t phương pháp lưu đồ? điểm
Sự mô tả hệ thống điều khiển một cách chi tiết bằng lời thường dài, khó theo
dõi, không trong sáng và không chính xác. Nó chỉ được sử dụng để mô tả một
cách khái quát nhất các chức năng và yêu cầu của hệ thống. Để mô tả hệ
thống điều khiển đáp ứng được các yêu cầu đã nêu thì trước hết cần phải chia
quá trình điều khiển thành các khối chức năng nhỏ, mỗi khối này ngoài các
đầu vào/ra vật lý còn có các đầu vào/ra logic để liên kết các khối lại với nhau.
Mỗi khối chức năng là những hệ thống điều khiển dạng tổ hỢp hay trình tự.
Như vậy, ta đã làm đơn giản hóa hệ thống bởi vì hệ thống điều khiển Ưình tự
ban đắu đã được chia thành các hệ thống điều khiển Ưình tự nhỏ và cả hệ
thống tổ hỢp - là hệ thống đơn giản hơn trong việc thiết kế.
Các phương pháp mô tả hệ thống điểu khiển gồm:
- Phương pháp logic rơle và cổng logic
- Phương pháp lưu đò
- Phương pháp sơ đò chức năng
1.5
-Phương pháp lưu đồ:
Phương pháp này thường dùng khi thiết kê chương trình cho máy tính, cũng
là phương pháp phổ biến để mô tả trình tự hoạt động của một hệ thống
điều khiển. LƯU đồ có quan hệ trực tiếp đến sự mô tả bằng lời hệ thống
điều khiển, chỉ ra điều kiện cắn kiểm ưa ở từng bước và các thao tác xử lý
trong bước đó. Phương pháp này có nhược điểm là chiếm nhiều không gian
khi mô tả hệ thống lớn.
1.5
Câu 12. Hãy trình bày các phương pháp mô tả hệ thống điều khiển?
Trình bày chi tiết phương pháp sơ đồ chức năng?
3
điểm
Sự mô tả hệ thống điều khiển một cách chi tiết bằng lời thường dài, khó theo
dõi, không trong sáng và không chính xác. Nó chỉ được sử dụng để mô tả một
cách khái quát nhất các chức năng và yêu cầu của hệ thống. Để mô tả hệ
thống điều khiển đáp ứng được các yêu cầu đã nêu thì ưước hết cần phải chia
quá trình điều khiển thành các khối chức năng nhỏ, mỗi khối này ngoài các
đầu vào/ra vật lý còn có các đầu vào/ra logic để liên kết các khối lại với nhau.
Mỗi khối chức năng là những hệ thống điều khiển dạng tổ hỢp hay trình tự.
Như vậy, ta đã làm đơn giản hóa hệ thống bởi vì hệ thống điều khiển trình tự
ban đầu đã được chia thành các hệ thống điều khiển tình tự nhỏ và cả hệ
thống tổ hỢp - là hệ thống đơn giản hơn trong việc thiết kế.
Các phương pháp mô tả hệ thống điều khiển gồm:
- Phương pháp logic rơle và cổng logic
- Phương pháp lưu đò
Phươnq pháp sơ đò chức nănq
1.5
-Phương pháp sơ đò chức năng:
Phương pháp này ngày càng trở nên phổ biến để mô tả các hoạt động
trình tự, cho pháp thể hiện một cách chi tiết các thao tác xử lý ở một trạng thái
(hay bước) cũng như ưình tự hoạt động của quá trình điều khiển.với cách
dùng các ký hiệu gọn và cô đọng cho phép mô tả hệ thống mạch lạc và rõ
ràng, mô tả được các chức năng chuyên dùng của các máy móc và quá trình,
không những gần gũi với các hoạt động của các cơ cấu máy hay quá trình mà
còn là công cụ hỗ trỢ đắc lực khi kiểm tra và chạy thử hệ thống.
1.5
1
4
r
Điều kiên khởi đông
Bước
1
►
x ử lý 1
'
4
r
Điều kiên chuyển bước
Bước
T
►
Xử lý 2
'
< *
r
Điều kiên chuyển
bước
Câu 13. Hãy trình bày các cách truy cập của PLC S7-200? 3
điểm
CPU S7-200 lưu trữ dữ liệu ở các vị trí khác nhau trong bộ nhớ, mỗi vị
trí nhớ có một địa chỉ duy nhất. Chương trình có thể sử dụng địa chỉ của vị trí
nhớ để truy nhập dữ liệu trong bộ nhớ. Cách truy nhập này gọi là định địa chỉ
trực tiếp.
Để truy nhập đến một bit trong một vùng nhớ nào đó, chương trình phải
chỉ rõ địa chỉ gồm tên vùng nhớ, địa chỉ byte, và địa chỉ bit. Địa chỉ byte và địa
chỉ bit ngăn cách nhau bởi dấu (.). Chê
độ địa chỉ này gọi là chê độ định địa
2.0
chỉ bit.
Định dạng địa chỉ:
[Tên vùng nhớ][Địa chỉ byte].[Địa chỉ bit]
Ví dụ: 13.4
Trong đó:
I: tên vùng nhớ (vùng nhớ đệm vào)
3: địa chỉ byte
4: địa chỉ bit
76543210
I 0
I 1
I 2
I 3
I 4
I 5
I 6
I 7
I 8
I 9
I 10
I 11
I 12
Chương trình có thể truy nhập dữ liệu trong các vùng nhớ theo byte, từ (word),
hoặc từ kép (double word) bằng cách chỉ rõ địa chỉ gồm tên vùng nhớ, kích
thước dữ liệu (byte - B, từ - w, hoặc từ kép - DW), và địa chỉ byte đầu tiên.
Chế độ địa chỉ này gọi là chế độ định địa chỉ byte.
Định dạng địa chỉ: [Tên vùng nhớ][Kích thước][Địa chỉ byte đầu tiên]
Ví dụ: VB100, VW100, VD100
7 0
VB100 VB100
15 £7 0
VW 100
VB100 VB101
31 24Ỉ3 16L5
87
VD 100
VB100 VB101
VB102 VB103
1.0
Câu 1: Hãy phân tích và viết chương trình PLC thực hiện trạm rót nhiên liệu.
Nguyên lý làm việc của hệ ứiông như sau:
- Băng tải A được quay bởi động cơ MA thực hiện cấp các lon, các lon này được
chuyển sang băng tải B sử dụng xilanh C3 khi cảm biến S6 báo có lon trên băng tải
Xinh lanh trở về vị trí ban đầu khi cảm biến SI báo.
- cảm biến S2 phát hiện có lon trên băng tải B, đây là điều khiển cho phép băng tải B
chuyển. Băng tải B chuyển động khoảng khoảng 0.5m sử dụng cảm biến S3 (Sử dụng
động cơ bang tải MB và phanh điện từ DTB).
- Đổng thời với băng tải B chuyển động, thực hiện mở xilanh C1 để chất lỏng chảy tù
thùng chứa TA vào thùng định lượng TB, quá trình này sẽ báo hết nhiên liệu trong thùng
A bằng còi và bằng đèn khi S5 chuyển trạng thái xuống 0. Quá trình này dừng lại khi
cảm biến S4 báo.
- Khi S3 báo, thực hiện mở xilanh C2 để rót chất lỏng vào chai (Thời gian rót được đặt
10 giây).
- Khi quá trình rót được thực hiện xong (thời gian 10 giây hết), quá trình trên lại được
lặp lại.
Tran rót nhiên liêu vào chai
Chú ý: Khi thực hiện phải làm những bước sau:
- Phân tích bài toán đ ể xác định sô đầu và kiểu loại vào/ra
- Chọn PLC và mô đun mở rộng (nếu cần
- Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)
_______
- Xây dựng lưu đò thuật toán_________________________________________________
í 5
điểm)
-
Viết chương trình
Trả lời: Điểm
1. Phân tích bài toán đê xác định số đầu và kiêu loại vào/ra
Bài toán gồm các đẩu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu Giải thích
1 Start 10.0 Đắu vào Núm ấn để hệ thống bắt đầu
2 Stop 10.1 Đầu vào Núm ấn dừng hệ thống
3
SI 10.2 Đẩu vào cảm biến báo hết hành trình của
xilanh
4 S2 10.3 Đắu vào Báo có chai trên trên băng tải B
ở vị trí từ băng tải A sang.
5 S3 10.4 Đắu vào
Báo chai ở vị trí cho phép rót
nhiên liêu
6 S4
10.5
Đắu vào
Báo nhiên liệu trong thùng
định lượng đã đầy
7 S5 10.6 Đẩu vào
Báo hết nhiên liệu thùng chứa
A
8 S6 10.7 Đắu vào
Báo có chai ở băng tải A
9 C1 QO.O Đẩu ra Điều khiển xilanh C1
10 C2 Q0.1 Đầu ra Điều khiển xilanh C2
11 C3 Q0.2 Đầu ra Điều khiển xilanh C3
12 MA Q0.3 Đầu ra Động cơ băng tải A
13
MB Q0.4 Đẩu ra Động cơ băng tải B
14 DTB Q0.5 Đầu ra Phanh điên từ
15 Fault Q0.6 Đầu ra Đèn báo hết nhiên liêu
16 Buzz Q0.7 Đầu ra Còi báo hết nhiên liêu
2. Chon PLC:
với đầu vào ra như trên 8 vào và 8 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU
224)
0.5
3. LƯU đồ thuật toán:
Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thông vào chê đô làm viêc. bât đông
cơ quay băng tải A (MA).
Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngƯỢc lại chuyển sang bước 2
Bước 2: Kiểm tra đầu vào cảm biến S6 và S2. Nêu S6 = 1 và S2 = 0 thì cấp điên cho
xilanh C1 để đẩy lon sang băng tải B, ngƯỢc lại chuyển sang bước 1.
Bước 3: Kiểm tra đầu vào cảm biến Sl. Nêu SI = 1 thì ngắt điên cho xilanh C1 để
xilanh trở về trạng thái ban đầu, ngược lại chuyển sang bước 3.
Bước 4: Kiểm tra đầu vào cảm biến S3 và S2. Nêu S2 = 1 và S3 = 0 thì thưc hiên
những thao tác sau:
- Ngắt điện phanh điện từ DTB và cấp điện cho động cơ quay băng tải B
(MB)
- Cấp điện cho xilanh C1
- Kiểm tra đầu vào cảm biến S3. Nêu S3 = 1 đù dừng động cơ MB và cấp
1.0
điện cho phanh từ DTB
- Kiểm tra cảm biến S4, nếu S4 = 1 thì ngắt điện xilanh C1
- Kiểm tra cảm biẽn S5, nếu S4 = 0 thì bật đèn và báo còi để thông báo hết
nhiên liệu trong thùng chứa TA (đèn Fault và còi Buzz).
- Nêu S3 = 1 và S4 = 1 thì chuyển sang bước 5. NgƯỢc lại trở lại bước 4.
Bước 5: Kiểm tra đắu vào cảm biến S3 và và cờ báo chưa rót nhiên liêu. Nêu S3 = 1
và cờ báo chưa rót nhiên liệu báo FALSE thì:
- Cấp điện cho xilanh C2
- Bật timer để trễ 10 giây
Bước 6: Kiểm tra cờ trang thái đổng hồ thời gian rót. Nêu cờ có logic 1 thì chuvên
sang bước 1. NgƯỢc lại trở về bước 6
4. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viên 2.5
Câu 2: Hãy phân tích và viết chương trình PLC thực hiện quá trình điều khiển
đóng náp chai.
Nguyên lý làm việc của hệ ứiông như sau :
Cấp điện cho băng tải A cho đến khi cảm biến SI báo có chai ở vị trí đóng
nắp.
Cấp điện cho xilanh C2 cho đến khi cảm biến S7 bật lên,
MỞ xilanh C1 một phần đến khi cảm biến S3 bật lên và cùng thời điểm này
cấp điện cho van VI để hút khí tạo chân không để giữ nắp.
Thu xilanh C2 vào cho đến khi cảm biến S6 bật lên
MỞ xi lanh C1 cho đến khi cảm biến S2 bật lên và đồng thời ngắt điện cho
van VI để thả nắp.
Thu xilanh C1 vào cho đến khi cảm biến S8 bật lên
cảm biến S5 sử dụng để kiểm tra nắp đã được đóng chưa và đếm sản phẩm
Lặp lại chu tình như trên
Trạn đóng nấỊ) chai
(5
điểm)
Băng tải
Động cơ băng tải
Chú ý: Khi thực hiện phải làm những hước sau:
- Phân tích bài toán đ ể xác định số đầu và kiểu loại vào/ra
- Chọn PLC và mô đun mở rộng (nếu cần - Nếu sô đầu vào/ra quá nhiều thì
cần phải chọn thêm mô đun mở rộng)
- Xây dựng lưu đò thuật toán
- Viết chương ữình
Trả lòi: Điểm
1. Phân tích bài toán để xác định số đầu và kiểu loại vào/ra
Bài toán gổm các đâu vào/ra như sau:
1
Stt Ký hiệu Đia chỉ Kiểu tín hiêu
Giải thích
1 Start 10.0 Đắu vào Núm ấn để hệ thông bắt đầu
2 Stop 10.1 Đầu vào Núm ấn dừng hệ thống
3
SI 10.2 Đầu vào cảm biến báo có chai ở vị trí
đóng nắp
4 S2 10.3 Đắu vào cảm biến báo hết hành trình của
xilanh C1 (vị trí mà đủ lực ép
nắp vào chai).
5 S3 10.4 Đẩu vào
cảm biến báo vị trí xilanh C1
ở vị trí giữa
6 S4
10.5
Đắu vào
Báo hành trình trở về hết của
xilanh C1
7 S5 10.6 Đầu vào
cảm biến báo nắp đã được
đóng và cũng sử dụng để
đếm sản phẩm.
8 S6 10.7 Đẩu vào
Báo hành trình trở về hết của
xilanh C2
9 S7
11.0
Đầu vào
Báo hành trình ra hết của
xilanh C2
10 C1 QO.O Đầu ra Điều khiển xilanh C1
11 C2 Q0.1 Đầu ra Điều khiển xilanh C2
12 MB Q0.3 Đầu ra Động cơ băng tải B
13 VI Q0.4 Đầu ra Van hút chân không
2. Chon PLC:
với đầu vào ra như trên 9 vào và 4 ra thì chúng ta dùng CPU PLC S7-200 là đủ (CPU
224)
0.5
3. LƯU đồ thuật toán:
Bước 1: Kiểm tra núm Start. nếu ấn. cho phép hê thống vào chê đô làm viêc. bât đông
cơ quay băng tải B (MB).
Kiểm tra núm Stop. Nêu Stop = 1 then dừng hệ thống, ngƯỢc lại chuyển sang bước 2
Bước 2: Kiểm tra đẩu vào cảm biến S6 và S2. Nêu S6 = 1 và S2 = 0 thì cấp điên cho
xilanh C1 để đẩy lon sang băng tải B, ngƯỢc lại chuyển sang bước 1.
Bước 3: Kiểm ưa đầu vào cảm biến Sl. Nêu SI = 1 thì ngắt điên cho xilanh C1 để
xilanh trở về trạng thái ban đẩu, ngƯỢc lại chuyển sang bước 3.
Bước 4: Kiểm tra đầu vào cảm biến S3 và S2. Nêu S2 = 1 và S3 = 0 thì thưc hiên
những thao tác sau:
- Ngắt điện phanh điện từ DTB và cấp điện cho động cơ quay băng tải B
(MB)
- Cấp điện cho xilanh C1
- Kiểm tra đầu vào cảm biên S3. Nêu S3 = 1 thì dùhg động cơ MB và cấp
1.0
điện cho phanh từ DTB
- Kiểm tra cảm biến S4, nếu S4 = 1 thì ngắt điện xilanh C1
- Kiểm tra cảm biến S5, nếu S4 = 0 thì bật đèn và báo còi để thông báo hết
nhiên liệu trong thùng chứa TA (đèn Fault và còi Buzz).
- Nêu S3 = 1 và S4 = 1 thì chuyển sang bước 5. NgƯỢc lại trở lại bước 4.
Bước 5: Kiểm tra đầu vào cảm biến S3 và và cờ báo chưa rót nhiên liêu. Nêu S3 = 1
và cờ báo chưa rót nhiên liệu báo FALSE thì:
- Cấp điện cho xilanh C2
- Bật timer để trễ 10 giây
Bước 6: Kiểm tra cờ trang thái đồng hổ thời gian rót. Nêu cờ có logic 1 thì chuvên
sang bước 1. NgƯỢc lại trở về bước 6
4. Viết chương trình: Theo thuật toán và cách sử dụng lệnh của học viền 2.5