Bài giảng môn kĩ thuật lập trình plc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.03 MB, 69 trang )
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
1
Chương 1: TỔNG QUAN VỀ PLC
1.1
GIỚI THIỆU VỀ PLC (Programmable Logic Control)
(Bộ điều khiển logic khả
trình)
Hình thành từ nhóm các kỹ sư hãng General Motors năm 1968 với ý tưởng ban đầu
là thiết kế một bộ điều khiển thỏa mãn các yêu cầu sau:
¾ Lập trình dễ dàng, ngôn ngữ lập trình dễ hiểu.
¾ Dễ dàng sửa chữa thay thế.
¾ Ổn đònh trong môi trường công nghiệp.
¾ Giá cả cạnh tranh.
Thiết bò điều khiển logic khả trình (PLC: Programmable Logic Control) (hình 1.1)
là loại thiết bò cho phép thực hiện linh hoạt các thuật toán điều khiển số thông qua một
ngôn ngữ lập trình, thay cho việc thể hiện thuật toán đó bằng mạch số.
Hình 1.1
Như vậy, với chương trình điều khiển trong mình, PLC trở thành bộ điều khiển số
nhỏ gọn, dễ thay đổi thuật toán và đặc biệt dễ trao đổi thông tin với môi trường xung
quanh (với các PLC khác hoặc với máy tính). Toàn bộ chương trình điều khiển được lưu
nhớ trong bộ nhớ PLC dưới dạng các khối chương trình (khối OB, FC hoặc FB) và thực
hiện lặp theo chu kỳ của vòng quét.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
2
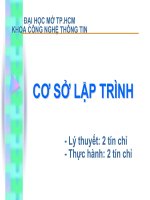
Hình 1.2
Để có thể thực hiện được một chương trình điều khiển, tất nhiên PLC phải có tính
năng như một máy tính, nghóa là phải có một bộ vi xử lý (CPU), một hệ điều hành, bộ nhớ
để lưu chương trình điều khiển, dữ liệu và các cổng vào/ra để giao tiếp với đối tượng điều
khiển và trao đổi thông tin với môi trường xung quanh. Bên cạnh đó, nhằm phục vụ bài
toán điều khiển số, PLC còn cần phải có thêm các khối chức năng đặc biệt khác như bộ
đếm (Counter), bộ đònh thì (Timer) … và những khối hàm chuyên dụng.
PROGRAMMABLE
CONTROLLER
Isolation
Barrier
Isolation
Barrier
Central
Processor
program
data
Low Voltage
AC Power
Output
DC Power
or
Communications
Port
Input
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
3
Hình 1.3
Hệ thống điều khiển sử dụng PLC
Hình 1.4 Hệ thống điều khiển dùng PLC
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
4
1.2
PHÂN LOẠI
PLC được phân loại theo 2 cách:
¾ Hãng sản xuất: Gồm các nhãn hiệu như Siemen, Omron, Misubishi, Alenbratlay…
¾ Version:
Ví dụ: PLC Siemen có các họ: S7-200, S7-300, S7-400, Logo.
PLC Misubishi có các họ: Fx, Fx
0
, Fx
ON
1.3
CÁC BỘ ĐIỀU KHIỂN VÀ PHẠM VI ỨNG DỤNG
1.3.1
Các bộ điều khiển
Ta có các bộ điều khiển: Vi xử lý, PLC và Máy tính.
1.3.2
Phạm vi ứng dụng
1.3.2.1 Máy tính
• Dùng trong những chương trình phức tạp đòi hỏi độ chính xác cao.
• Có giao diện thân thiện
• Tốc độ xử lý cao
• Có thể lưu trữ với dung lượng lớn
1.3.2.2 Vi xử lý
• Dùng trong những chương trình có độ phức tạp không cao (vì chỉ xử lý 8 bit).
• Giao diện không thân thiện với người sử dụng
• Tốc độ tính toán không cao.
• Không lưu trữ hoặc lưu trữ với dung lượng rất ít
1.3.2.3 PLC
• Độ phức tạp và tốc độ xử lý không cao
• Giao diện không thân thiện với người sử dụng
• Không lưu trữ hoặc lưu trữ với dung lượng rất ít
• Môi trường làm việc khắc nghiệt
1.4
CÁC LĨNH VỰC ỨNG DỤNG PLC
PLC được sử dụng khá rộng rãi trong các ngành: Công nghiệp, Máy nông nghiệp,
Thiết bò y tế, tô (xe hơi, cần cẩu…)…
1.5 CÁC ƯU ĐIỂM KHI SỬ DỤNG HỆ THỐNG ĐIỀU KHIỂN VỚI PLC:
- Không cần đấu dây cho sơ đồ điều khiển logic như kiểu dùng rơ le.
- Có độ mềm dẻo sử dụng rất cao, khi chỉ cần thay đổi chương trình (phần mềm)
điều khiển.
- Chiếm vò trí không gian nhỏ trong hệ thống.
- Nhiều chức năng điều khiển.
- Tốc độ cao.
- Công suất tiêu thụ nhỏ.
- Không cần quan tâm nhiều về vấn đề lắp đặt.
- Có khả năng mở rộng số lượng đầu vào/ra khi nối thêm các khối vào/ra chức năng.
- Tạo khả năng mở ra các lónh vực áp dụng mới.
- Giá thành không cao.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
5
Chính nhờ những ưu thế đó, PLC hiện nay được sử dụng rộng rãi trong các hệ
thống điều khiển tự động, cho phép nâng cao năng suất sản xuất, chất lượng và sự đồng
nhất sản phẩm, tăng hiệu suất , giảm năng lượng tiêu tốn, tăng mức an toàn, tiện nghi và
thoải mái trong lao động. Đồng thời cho phép nâng cao tính thò trường của sản phẩm.
1.6 GIỚI THIỆU CÁC NGÔN NGỮ LẬP TRÌNH
Các loại PLC nói chung thường có nhiều ngôn ngữ lập trình nhằm phục vụ các đối
tượng sử dụng khác nhau. PLC S7-300 có 5 ngôn ngữ lặp trình cơ bản. Đó là:
¾ Ngôn ngữ “hình thang”, ký hiệu là LAD (Ladder logic).
Đây là ngôn ngữ đồ hoạ thích hợp với những người quen thiết kế mạch logic.
¾ Ngôn ngữ “liệt kê lệnh”, ký hiệu là STL (Statement list).
Đây là dạng ngôn ngữ lập trình thông thường của máy tính. Một chương trình được
ghép gởi nhiều câu lệnh theo một thuật toán nhất đònh, mỗi lệnh chiếm một hàng và đều
có cấu trúc chung là “tên lệnh” + “toán hạng”.
¾ Ngôn ngữ “hình khối”, ký hiệu là FBD (Function Block Diagram).
Đây cũng là ngôn ngữ đồ hoạ thích hợp với những người quen thiết kế mạch
điều khiển số.
¾ Ngôn ngữ GRAPH.
Đây là ngôn ngữ lập trình cấp cao dạng đồ hoạ. Cấu trúc chương trình rõ ràng,
chương trình ngắn gọn. Thích hợp cho người trong ngành cơ khí vốn quen với giản đồ
Grafcet của khí nén.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
6
Hình 1.5
¾ Ngôn ngữ High GRAPH.
Hình 1.6
Là dạng ngôn ngữ lập trình phát triển từ ngôn ngữ lập trình GRAPH.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
7
Chương 2: CẤU TRÚC PHẦN CỨNG PLC HỌ S7
2.1 CÁC TIÊU CHUẨN VÀ THÔNG SỐ KỸ THUẬT HỌ S7-200, S7-300
Xem phụ lục 1
2.2 CÁC TÍNH NĂNG CỦA PLC S7-300, S7-200
2.2.1 S7-300
• Hệ thống điều khiển kiểu Module nhỏ gọn cho các ứng dụng trong phạm vi
trung bình
• Có nhiều loại CPU
• Có nhiều Module mở rộng
• Có thể mở rộng đến 32 Module
• Các Bus nối tích hợp phía sau các Module
• Có thể nối mạng Multipoint Interface (MPI), Profibus hoặc Industrial Ethernet
• Thiết bò lập trình trung tâm có thể truy cập đến các Module
• Không hạn chế rãnh
• Cài đặt cấu hình và thông số với công cụ trợ giúp “HW-Config.
2.2.2 S7-200
• Hệ thống điều khiển kiểu Module nhỏ gọn cho các ứng dụng trong phạm vi hẹp
• Có nhiều loại CPU
• Có nhiều Module mở rộng
• Có thể mở rộng đến 7 Module
• Bus nối tích hợp trong Module ở mặt sau
• Có thể nối mạng với cổng giao tiếp RS 485 hay Profibus
• Máy tính trung tâm có thể truy cập đến các Module
• Không qui đònh rãnh cắm
• Phần mềm điều khiển riêng
• Tích hợp CPU, I/O nguồn cung cấp vào một Module
• “Micro PLC với nhiều chức năng tích hợp.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
8
2.3 CÁC MODULE CỦA PLC S7-300, S7-200
2.3.1 S7-300
Hình 2.1
¾ Module CPU
Module CPU là module chứa bộ vi xử lý, hệ điều hành, bộ nhớ, các bộ đònh thì, bộ
đếm, cổng truyền thông (RS 485) … và có thể còn có một vài cổng vào/ra số. Các cổng
vào/ra số có trên module CPU được gọi là cổng vào/ra onboard như CPU 314IFM.
Trong họ PLC S7-300 có nhiều loại module CPU khác nhau. Nói chung chúng được
đặt tên theo bộ vi xử lý có trong nó như module CPU312, module CPU314, module
CPU315….
Những module cùng sử dụng một loại bộ vi xử lý, nhưng khác nhau về cổng vào/ra
onboard cũng như các khối hàm đặc biệt được tích hợp sẵn trong thư viện của hệ điều
hành phục vụ việc sử dụng các cổng vào/ra onboard này sẽ phân biệt với nhau trong tên
gọi bằng cách thêm cụm chữ cái IFM (Intergrated F
unction Module). Ví dụ module
CPU313IFM, module CPU314IFM…
Ngoài ra, còn có các loại module CPU với hai cổng truyền thông, trong đó cổng
truyền thông thứ hai có chức năng chính là phục vụ việc nối mạng phân tán như mạng
PROFIBUS (PROcess FIeld BUS). Tất nhiên kèm theo cổng truyền thông thứ hai này là
những phần mềm tiện dụng thích hợp cũng đã được cài sẵn trong hệ điều hành. Các loại
module CPU này được phân biệt với các loại module CPU khác bằng cách thêm cụm từ
DP (Distributed Port). Ví dụ như module CPU315-2DP.Tham khảo hình dưới:
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
9
Hình 2.2 Cổng giao tiếp của các PLC
Các loại module mở rộng:
¾ PS (Power Supply): Module nguồn nuôi, có 3 loại 2A, 5A và 10A.
¾ SM (Signal M
odule): Module mở rộng cổng tín hiệu vào/ra, gồm có:
• DI (Digital I
nput): Module mở rộng các cổng vào số với số lượng cổng có
thể là 8, 16 hoặc 32 tùy theo từng loại module. Gồm 24VDC và 120/230V AC.
• DO (Digital O
utput): Module mở rộng các cổng ra số với số lượng cổng có
thể là 8, 16 hoặc 32 tùy theo từng loại module. Gồm 24VDC và ngắt điện từ.
•
DI/DO (Digital Input/Digital Out)
: Module mở rộng các cổng vào/ra số với
số lượng cổng có thể là 8 vào/8 ra hoặc 16 vào/16 ra tùy theo từng loại module.
• AI (Anolog I
nput): Module mở rộng các cổng vào tương tự. Về bản chất
chúng là những bộ chuyển đổi tương tự số 12 bits (AD), tức là mỗi tín hiệu tương tự được
chuyển đổi thành một tín hiệu số (nguyên) có độ dài 12 bits. Số các cổng vào tương tự có
thể là 2, 4 hoặc 8 tùy theo loại module. Tín hiệu vào có thể là áp, dòng, điện trở.
•
AO (Anolog Output)
: Module mở rộng các cổng ra tương tự. Chúng là
những bộ chuyển đổi số tương tự 12 bits (DA). Số các cổng ra tương tự có thể là 2, 4 hoặc
8 tùy theo loại module. Tín hiệu ra có thể là áp hoặc dòng.
• AI/AO (Analog I
nput/Analog Output): Module mở rộng các cổng vào/ra
tương tự. Số các cổng tương tự có thể là 4 vào/2 ra hoặc 4 vào/4 ra tùy theo từng loại
module.
¾ IM (Interface M
odule): Module ghép nối. Đây là loại module chuyên dụng có
nhiệm vụ nối từng nhóm các module mở rộng lại với nhau thành một khối và được quản lý
chung bởi một module CPU. Thông thường các module mở rộng được gá liền với nhau
trên một thanh đỡ gọi là rack (hình 2.3). Trên mỗi thanh rack chỉ có thể gá tối đa 8
module mở rộng (không kể module CPU, nguồn nuôi). Một module CPU S7-300 có thể
làm việc trực tiếp với nhiều nhất 4 racks và các racks này phải được nối với nhau bằng
module IM (xem hình 2.4).
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
10
Hình 2.3 Thanh rack
Hình 2.4 Sơ đồ phân bố các racks
¾ FM (Function M
odule): Module có chức năng điều khiển riêng, ví dụ như
module điều khiển động cơ servo, module điều khiển động cơ bước, module PID, module
điều khiển vòng kín, Module đếm, đònh vò, điều khiển hồi tiếp …
¾ CP (Communication M
odule): Module phục vụ truyền thông trong mạng
(MPI, PROFIBUS, Industrial Ethernet) giữa các PLC với nhau hoặc giữa PLC với máy
tính.
Hình sau là cấu hình đầy đủ của một thanh Rack và sơ đồ kết nối nhiều Rack:
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
11
Hình2.5 Cấu hình một thanh rack của PLC S7-300
Hình 2.6 Cấu hình tổng quát của một PLC S7-300 với 4 thanh rack nối với nhau nhờ module
IM và cáp nối 368
¾ Phụ kiện
Bus nối dữ liệu (Bus connector).
¾ Kiểm tra phần cứng
Kiểm tra bằng cách nhìn LED ở bộ nguồn
Bảng 2.1
LED “DC 24V TRẠNG THÁI PHẢN ỨNG CỦA NGUỒN
Sáng liên tục Có điện áp 24V Có điện áp 24V
Chớp Mạch ra quá tải:
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
12
LED “DC 24V TRẠNG THÁI PHẢN ỨNG CỦA NGUỒN
Cao đến 130%
(động)
Cao đến 130%
(tónh)
Bò sụt áp
Điện áp được hồi phục khi không còn quá tải
Cao đến 130% tónh
Điện áp suy giảm, giảm tuổi thọ
Off Ngắn mạch lối ra Mất điện áp, tự động hồi phục khi ngắn mạch
được loại bỏ
Off Quá áp hay thấp áp
phần sơ cấp
Quá áp có thể gây thiệt hại.
Khi bò thấp áp tự động ngắt
Kiểm tra bằng cách nhìn LED ở CPU của S7 – 300
Hình 2.7
• Trạng thái hiển thò LED:
-
SF
=
Lỗi nhóm, chương trình sai hay lỗi từ khối chuẩn đoán
- BATF = Lỗi Pin, Pin hết hay không có pin
- DC5V = Báo có 5 VDC
- FRCE = Sáng lên khi biến cưỡng bức tác động
- RUN = Nhấp nháy khi CPU khởi động, ổn đònh ở chế độ RUN
- STOP = Ổn đònh ở chế độ STOP
Chớp chậm khi có yêu cầu RESET bộ nhớ
Chớp nhanh khi đang RESET bộ nhớ
• Chìa khóa công tắc: Để đặt bằng tay các trạng thái hoạt động của CPU
- MRES = Reset bộ nhớ (Reset khối)
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
13
I0.0
1L+1M
1M
DC24V OUTPUTS
DC
24V
DC
24V
INPUTS
0.0
0.0
0.1
0.1
0.2
0.2
0.3
0.3
2L+2M
2M
0.4
0.4
0.5
0.5
0.6
0.6
0.7
0.7
1.0
1.0
1.1
1.1 1.2 1.3 1.4 1.5
M
M
L+
L+ DC
SENSOR
SUPPLY
I1.0
TERM
STOP RUN VR1
Q0.0
SF
Q1.0
01
I0.1
I1.1
Q0.1
RUN Q1.1
Cổng truyền thông
I0.2
I1.2
Q0.2STOP
I0.3
I1.3
Q0.3
I0.4
I1.4
Q0.4
I0.5
I1.5
Q0.5
I0.6 Q0.6
I0.7 Q0.7
CPU-214
6ES7 214-1AC00
SIEMENS
SIMATIC
S7-200
- STOP = Trạng thái dừng STOP, chương trình không thực hiện
- RUN-P = Trạng thái chạy RUN, CPU thực hiện chương trình
- RUN = Chương trình được thực hiện, hoặc có thể, tuy nhiên, chỉ đọc
thôi không sửa được chương trình.
Kiểm tra bằng cách nhìn LED ở khối Digital
Hình 2.8
Mỗi kênh vào/ra của các modul đều được hiển thò bằng LED. Chúng có công
dụng có thể cho biết vò trí lỗi của chương trình. Chúng chỉ thò trạng thái quy trình
hoặc trạng thái bên trong trước bộ giao tiếp quang điện.
2.3.1 S7-200
Hình 2.9
Tích hợp CPU, I/O nguồn cung cấp vào một Module. Có nhiều loại CPU: CPU212, CPU 214,
CPU 215, CPU 216… Hình dáng CPU 214 thông dụng nhất được mô tả trên hình 2.1.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
14
Các Module mở rộng (EM) (External Modules):
9 Module ngõ vào Digital: 24V DC, 120/230V AC
9 Module ngõ ra Digital: 24V DC, ngắt điện từ
9 Module ngõ vào Analog: p, dòng, điện trở, cặp nhiệt
9 Module ngõ ra Analog: p, dòng
Hình 2.10 Ráp nối Module mở rộng
Module liên lạc xử lý (CP) (Communication Processor)
Module CP 242-2 có thể dùng để nối S7-200 làm chủ module giao tiếp AS.Kết quả là, có đến
248 phần tử nhò phân được điều khiển bằng 31 Module giao tiếp AS. Gia tăng đáng kể số ngõ vào và ngõ ra
của S7-200.
Phụ kiện
Bus nối dữ liệu (Bus connector).
Các đèn báo trên CPU
Các đèn báo trên mặt PLC cho phép xác đònh trạng thái làm việc hiện hành của PLC:
SF (đèn đỏ) : khi sáng sẽ thông báo hệ thống PLC bò hỏng.
RUN (đèn xanh) : khi sáng sẽ thông báo PLC đang làm việc và thực hiện chương trình được nạp vào máy.
STOP(đèn vàng) : khi sáng thông báo PLC đang ở chế độ dừng. Dừng chương trình đang thực hiện
lại.
Ix.x (đèn xanh) : Thông báo trạng thái tức thời của cổng vào PLC: Ix.x (x.x =0.0 ÷1.5). Đèn này báo
hiệu trạng thái của tín hiệu theo giá trò logic của cổng.
Qy.y (đèn xanh) : Thông báo trạng thái tức thời của cổng ra PLC: Qy.y (y.y =0.0 ÷1.1). Đèn này báo
hiệu trạng thái của tín hiệu theo giá trò logic của cổng.
Công tắc chọn chế độ làm việc của CPU:
Công tắc này có 3 vò trí : RUN – TERM - STOP, cho phép xác lập chế độ làm việc của PLC.
-RUN : Cho phép PLC vận hành theo chương trình trong bộ nhớ. Khi trong PLC đang ở RUN, nếu
có sự cố hoặc gặp lệnh STOP, PLC sẽ rời khỏi chế độ RUN và chuyển sang chế độ STOP.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
15
SM-321
16 DIGITAL INPUTS
DC 24V
L+
M
POWER IN
24VDC
I.2
I.3
I.4
I.5
I.6
I.7
I.8
I.9
I.12
I.13
I.14
I.15
I.16
I.17
I.18
I.19
- STOP: Cưỡng bức CPU dừng chương trình đang chạy và chuyển sang chế độ STOP. Ở chế độ
STOP, PLC cho phép hiệu chỉnh lại chương trình hoặc nạp chương trình mới.
- TERM : Cho phép máy lập trình tự quyết đònh chế độ làm việc của CPU hoặc ở chế độ RUN hoặc
STOP.
2.4 GIỚI THIỆU CẤU TẠO PHẦN CỨNG CÁC KIT THÍ NGHIỆM S7-300, S7-200
2.4.1 S7-300
Bộ điều khiển PLC S7–300 Station 1200 bao gồm các module sau:
2.4.1.1 Khối CPU-312 :
CPU-312 IMF sử dụng cho hệ thống thiù nghiệm với thế nuôi 24VDC, có bổ sung 10
lối vào số /24VDC, và 6 lối ra /24VDC.
2.4.1.2 Digital Input Module (DI) SM 321 DI 16 x DC24V (hình 2.11)
- 16 lối vào số (digital) độc lập và cách ly, điện thế cho lối vào 24V/10mA, chỉ thò
LED trạng thái vào
- Điện thế nuôi cho khối (qua chân L+ & M): 24V.
- Chức năng mở rộng lối vào điều khiển cho CPU S7-300.
Hình 2.11: Sơ đồ khối SM 321 DI 16 x DC 24V / 321 – 1BH02-0AA0
2.4.1.3 Digital Output Module (DO) SM 322 (hình 2.12)
- 8 lối ra relay độc lập, dòng giới hạn ở tiếp điểm relay: 2A. Chỉ thò LED trạng thái
ra.
- Điện thế nuôi cho khối (qua chân L+ & M): 24V.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
16
L+
M
AC230V
AC230V
AC230V
AC230V
MAX
MAX
MAX
MAX
3
7
12
16
4
8
13
17
5
9
14
18
SM-322
DIGITAL 0UTPUTS
8 RELAYS
POWER IN
24VDC
2
4
3
5
10
COMP
11
SM-331
2 ANALOG INPUTS-12BIT
A - 8O/250/500/1000mV/Pt100
B - 2.5/5/1 5/10V
C - 4WIRE CURRENT
D - 2WIRE CURRENT
L+
M
POWER IN
24VDC
AC
B
D
Hình 2.12 Sơ đồ khối SM 322 DO 8 x RELAY AC 230V / 322-1HF01-0AA0
- Chức năng mở rộng lối ra điều khiển cho CPU S7-300.
2.4.1.3 Analog Input Module SM 331(hình 2.13)
- 2 lối vào analog độc lập, phân giải 12 bit,
- Điện thế nuôi cho khối (qua chân L+ & M): 24V.
- Chức năng mở rộng lối vào điều khiển cho CPU S7-300.
Hình 2.13 Sơ đồ khối SM 331 AI 2 x 12 bit / 331-7KB02-0AB0
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
17
4
8
12
16
3
7
11
15
6
10
14
18
5
9
13
17
SM-332
2 ANALOG OUTPUTS-12BIT
L+
M
POWER IN
24VDC
2.4.1.4 Analog Ouput Module SM 332 (Hình 2.14)
- 2 lối ra analog độc lập, phân giải 12 bit,
- Điện thế nuôi cho khối (qua chân L+ & M): 24V.
- Chức năng mở rộng lối ra điều khiển cho CPU S7-300.
Hình 2.14 Sơ đồ khối SM 332 AO 4 x 12 bit / 332-5HD01-0AB0
2.4.1.5 Các khối phụ trợ cho thí nghiệm
Các khối phụ trợ cho thí nghiệm gồm các module chứa công tắc, relay, đèn báo,
có cấu trúc như trên hình 1.9.
¾
Khối Contact LSW-16
Chứa 16 công tắc đơn, phục vụ cho việc tạo các trạng thái lối vào cho PLC.
¾ Khối Relay RL-16
Chứa 16 relay 24V, sử dụng với tác động điều khiển từ lối ra PLC.
¾ Khối Đèn LL-16
Chứa 16 đèn 24V, sử dụng để chỉ thò trạng thái điều khiển.
¾
Khối AM-1 Simulator
Chứa 3 biến trở 10kΩ, điện thế cấp 24V, cho phép tạo các điện thế DC cho thí
nghiệm.
¾
Khối DCV-804 Meter
Chứa ADC với hiển thò 4
1/2
digits, cho phép đo điện thế DC tạo ra từ hệ PLC.
¾
Khối nguồn 24V / 5A
Cung cấp nguồn nuôi cho các modules.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
18
2
4
8
12
16
4
3
7
11
15
6
10
14
18
3
5
9
13
17
5
10
COMP
11
COMM
SM-331 SM-332
2 A NA LOG IN PUTS-1 2BIT 2 A NA LOG OUTPU TS-12BIT
A - 8O/250/500/1000mV/Pt100
B - 2 .5/ 5/1 5/1 0V
C - 4WIRE CURRENT
D - 2WI RE CURRENT
SM-321
16 DIGITAL INPUTS
DC 24V
10 DIGITAL IN PUTS
6 DIGITAL OUTPUTS
L+ L+ L+ L+
L+
M MM M
M
AC230V
AC230V
AC230V
AC230V
MAX
MAX
MAX
MAX
3
7
12
16
4
8
13
17
5
9
14
18
SM-322
DIGITAL 0UTPUTS
8 RELAYS
POWER IN POWER IN POWER IN PO WER I N
POWER IN
24VD C 24VD C
24VDC 24VDC
24VDC
AC
B
D
I.2
I.3
I.4
I.5
I.6
I.7
I.8
I.9
I.12
I.13
I.14
I.15
I.16
I.17
I.18
I.19
I.3
AM-1
SIMULATOR
MIN
MIN
MIN
MAX
MAX
MAX
POTENTIOMET 1
POTENTIOMET 2
POTENTIOMET 3
DCV-804
METER
DVM INPUT
V
+
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
CL OSE
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
SW9
SW10
SW11
SW12
SW13
SW14
SW15
SW16
LSW-16
SWITC HES
LL-16
INDICATORS
LAMP1
LAM P 2 4V
LAMP2
LAMP3
LAMP4
LAMP5
LAMP6
LAMP7
LAMP8
LAMP9
LAMP10
LAMP11
LAMP12
LAMP13
LAMP14
LAMP15
LAMP16
RL-16
RELAYS
ROL E 1
ROL E 9
ROLE 2
ROLE 10
ROL E 3
ROLE 11
ROLE 6
ROLE 14
ROLE 4
ROLE 12
ROLE 7
RO LE 15
ROLE 5
ROL E 13
ROL E 8
ROLE 16
24VDC
24VDC
24VDC
24VDC
24VDC
24VDC
24VDC
24VDC
24V DC
24V DC
24V DC
24V DC
24V DC
24V DC
24VDC
24VDC
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
POWER ON
L+
M
24VDC
OUTPUT
FUS EFUSE
24VDC/5A220VA C/0.5A
PS-1200
MAIN. POWER
220VAC/10A.50Hz
PS-1200
AUX. POWER
220VAC/10A.50Hz
Hình 2.15
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
19
2.4.2 S7-200
Hệ thống bao gồm các thiết bò :
1. Bộ điều khiển PLC-Station 1200 chứa :
- CPU-214 : AC Power Supply, 24VDC Input, 24VDC Output
- Digital Input / Output EM 223 : 4x DC 24V Input, 4x Relay Output
- Analog Input / Output EM 235 : 3 Analog Input, 1 Analog Output 12bit
2. Khối Contact LSW-16
3. Khối Relay RL-16
4. Khối Đèn LL-16
5. Khối AM-1 Simulator
6. Khối DCV-804 Meter
7. Khối nguồn 24V PS-800
8. Máy tính.
9. Các dây nối với chốt cắm 2 đầu
Mô tả hoạt động của hệ thống
1. Các lối vào và lối ra CPU cũng như của các khối Analog và Digital được nối ra các chốt cắm.
2. Các khối PLC STATION – 1200, DVD – 804 và PS – 800 sử dụng nguồn 220VAC
3. Khối RELAY – 16 dùng các RELAY 24VDC
4. Khối dèn LL – 16 dùng các đèn 24V
5. Khối AM – 1 dùng các biến trở 10KΩ
Dùng các dây nối có chốt cắm 2 đầu và tùy từng bài toán cụ thể để đấu nối các lối vào / ra của CPU
214, khối Analog EM235, khối Digital EM222 cùng với các đèn, contact, Relay, biến trở, và khối chỉ thò
DCV ta có thể bố trí rất nhiều bài thực tập để làm quen với cách hoạt động của một hệ thống PLC, cũng như
cách lập trình cho một hệ PLC.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
20
Chương 3: KIẾN THỨC CƠ SỞ
3.1 KỸ THUẬT SỐ VÀ LOGIC SỐ CƠ BẢN
3.1.1 Biến và hàm số hai giá trò
Biến hai trò, hay còn gọi biến Boole là loại hàm số mà miền giá trò của nó chỉ có
hai phần tử. Ta sẽ ký hiệu chúng bằng những chữ nhỏ in nghiêng như x, y, u, v,… và phần
tử của chúng là 0 và 1. Ví dụ
¾ Công tắt là một biến Boole với 2 giá trò: đóng (ký hiệu là 1) và mở (ký hiệu là
0).
¾ Đèn hiệu cũng là một biến Boole với hai trạng thái: Sáng (ký hiệu là 1) và tắt
(ký hiệu là 0).
Hai biến Boole được gọi là độc lập nhau nếu sự thay đổi giá trò của biến số này
không ảnh hưởng đến giá trò của biến số kia. Ví dụ 2 công tắt trong hình 3.1 là 2 biến
Boole độc lập với nhau.
Hình 3.1
Ngược lại, nếu giá trò của một biến số y phụ thuộc vào giá trò của biến số x thì
biến y được gọi là biến phụ thuộc của biến x . Ví dụ trong hình 3.1 thì đèn là 2 biến phụ
thuộc vào biến công tắc. Đèn sẽ sáng nếu cả 2 biến công tắc có giá trò 1 và sẽ tắt nếu một
trong hai biến có giá trò 0.
Hàm hai trò là mô hình toán học mô tả sự phụ thuộc của một biến Boole vào các
biến Boole khác. Chẳng hạn như để biểu diễn sự phụ thuộc của đèn, ký hiệu là z, vào 2
biến công tắc, ký hiệu là x và y, ta viết
z = f(x,y)
Công tắc 1
x
Công tắc 2
y
Đèn
z
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
21
Một cách tổng quát hàm hai trò mô tả sự phụ thuộc của biến số y vào n biến x
1
, x
2
,
…, x
n
có dạng
y = f(x
1
, x
2
, …, x
n
).
Việc mô tả sự phụ thuộc của một biến Boole này vào các biến Boole khác thành
hàm hai trò dựa vào ba phép tính cơ bản. Đó là phép tính và (ký hiệu là ^), hoặc (ký hiệu
là v), phủ đònh (ký hiệu là ) được đònh nghóa như sau:
Bảng 3.1
Phép tính và Phép tính hoặc Phép phủ đònh
xy x^y xy
xvy x
x
0
0
1
1
0
1
0
1
0
0
0
1
0
0
1
1
0
1
0
1
0
1
1
1
0
1
1
0
Ví dụ, hàm f(x,y) biểu diễn biến đèn z phụ thuộc vào hai biến công tắc x, y sẽ là:
z = f(x,y) = x^y = x.y
3.1.2 Tính chất
x^1 = 1^x = x, với x thuộc
B
Ỉ 1 là phần tử đơn vò của phép toán ^.
xv0 = 0vx = x, với x thuộc B Ỉ 0 là phần tử đơn vò của phép toán v.
xvy = yvx (Tính giao hoán)
xv(y^z) = (xvy)^z (Tính kết hợp)
(x^y)v(xv y ) = x
,
.,
.0,
11,
0,
1,
.,,
., ,
().(.)(.),,,
(.) ( ).( ), , ,
xxxB
xxxxvxxB
xx x B
vx x B
vx x x B
xvx x B
xy xvy x y B
xvy x y x y B
xvy z x z v y z x y z B
x y vz xvz yvz x y z B
=∀∈
== ∀∈
=∀∈
=∀∈
=∀∈
=∀∈
=∀∈
=∀∈
=∀∈
=∀∈
3.1.3 Xác đònh công thức hàm hai trò từ bảng chân lý
Ta sẽ xét bài toán ngược là tìm công thức biểu diễn hàm f(
x
) từ bảng giá trò
chân lý đã biết của hàm đó. Công việc này là cần thiết vì trong thực tế nhiều bài
toán tổng hợp bộ điều khiển được bắt đầu từ bảng chân lý.
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
22
Trước hết hãy làm quen với hai khái niệm mới là biểu thức nguyên tố tổng
và biểu thức nguyên tố tích
nếu trong T(x):
¾ Có mặt tất cả các biến số x
k
, k=1, 2,…, n và mỗi biến chỉ xuất hiện một
lần,
¾ Chỉ cấu thành bởi hai phép tính ^,
hoặc v, .
Ví dụ:
T
1
(
x
1
, x
2
, x
3
) =
123
xxx
(tạo bởi 2 phép toán ^, ),
T
2
(
x
1
, x
2
, x
3
) =
3
12
xxx∨∨
(tạo bởi 2 phép toán), )
Là các biểu thức nguyên tố.
Biểu thức nguyên tố với 2 phép tính ^,
được gọi là biểu thức nguyên tố
tích
còn biểu thức nguyên tố với 2 phép tính v,
gọi là
biểu thức nguyên tố tổng
.
Trong ví dụ trên T
1
là biểu thức nguyên tố tích còn T
2
gọi là
biểu thức nguyên tố
tổng
.
Để tiện cho việc trình bày ta quy ước:
0
kk
xx
=
và
1
kk
xx
=
vậy một biểu thức nguyên tố tích T
N
(x) với n biến 2 trò x
1
, x
2
,…,x
n
có dạng
12
12
1
()
nk
n
Nnk
k
Tx xx x x
=
==∏
và một biểu thức nguyên tố tổng T
C
(x) với n biến 2 trò x
1
, x
2
,…,x
n
có dạng
12
12
1
()
nk
n
Cnk
k
Tx x x x x
=
=∨∨∨=∑
Trong đó
q
k
=0 nếu biến x
k
xuất hiện dưới dạng phủ đònh
q
k
=1 nếu biến x
k
xuất hiện dưới dạng không phủ đònh
Từ đònh nghóa ta thấy các biểu thức nguyên tố có các đặc điểm:
Biểu thức nguyên tố tích T
N
(x) có giá trò 1 khi và chỉ khi tất cả các
thừa số cùng có giá trò 1. Như vậy nếu
x
k
xuất hiện trong biểu thức
dạng phủ đònh (q
k
=0) thì x
k
phải có giá trò 0 và ngược lại nếu q
k
=1 thì
x
k
phải có giá trò 1.
Biểu thức nguyên tố tổng T
C
(x) có giá trò 0 khi và chỉ khi tất cả các
thương số cùng có giá trò 0. Như vậy nếu
x
k
xuất hiện trong biểu thức
dạng phủ đònh (q
k
=0) thì x
k
phải có giá trò 1 và ngược lại nếu q
k
=1 thì
x
k
phải có giá trò 0.
Bây giờ ta xác đònh biểu thức hàm hai trò từ bảng chân lý của nó.
Xác đònh nhờ biểu thức nguyên tố tích
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
23
Biểu thức hàm hai trò f(x) sẽ tương đương với kết quả phép HOẶC của tất
cả các biểu thức nguyên tố tích của các hàng có giá trò 1 trong bảng chân lý. Ta sẽ
minh hoạ nguyên tắt bằng một ví dụ.
Bảng 3.2
x
1
x
2
x
3
x
4
f(x) T
N
i
(
x
)
0000 0
1234
xxxx∨∨∨
0001 0
1234
xxxx∨∨∨
0010 1
12 4
3
xxxx
0011 0
34
12
xx x x
∨∨∨
0100 0
2
134
xx xx∨∨∨
0101 1
13
24
xx xx
0110 0
23
14
xx x x∨∨∨
0111 0
234
1
xx x x∨∨∨
1
000 0
1
234
xxxx∨∨∨
1001 1
23
14
xx xx
1011 0
134
2
xxxx∨∨∨
1100 0
12
34
xxxx∨∨∨
1
101 1
3
12 4
xx x x
1110 0
123
4
xxxx∨∨∨
1111 0
1234
xxxx∨∨∨
Suy ra: f(x) = (
12 4
3
xxxx
)
∨
(
13
24
xx xx
)
∨
(
23
14
xx xx
)
∨
(
3
12 4
xx x x
)
Xác đònh nhờ biểu thức nguyên tố tổng
Biểu thức hàm hai trò f(x) sẽ tương đương với kết quả phép AND của tất
cả các biểu thức nguyên tố tổng của các hàng có giá trò 0 trong bảng chân lý. Ta sẽ
minh hoạ nguyên tắt bằng ví du trênï.
Suy ra: f(x) =(
1234
xxxx∨∨∨
)(
1234
xxxx∨∨∨
)(
34
12
xx x x
∨∨∨
)
(
2
134
xx xx∨∨∨
)(
23
14
xx x x∨∨∨
)(
234
1
xx x x∨∨∨
)(
1
234
xxxx∨∨∨
)
(
134
2
xxxx∨∨∨
)(
12
34
xxxx∨∨∨
)(
1234
xxxx∨∨∨
)
1.1.4 Biểu diễn số nguyên dương
Biểu diễn trong hệ cơ số 10
Một số nguyên dương u
k
bất kỳ, trong hệ cơ số 10 bao giờ cũng được biểu
diễn đầy đủ bằng dãy các con số nguyên từ 0 đến 9. Ví dụ u
k
= 259 được biểu diễn
bằng 3 con số: 2, 5 và 9 và cách biểu diễn đó được hiểu là
U
k
= 2.10
2
+ 5.10
1
+ 9.10
0
Một cách tổng quát khi biểu diễn trong hệ cơ số 10 u
k
có dạng
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
24
U
k
= a
n
.10
n
+ a
n-1
.10
n-1
+…+ a
1
.10
1
+ a
0
.10
0
(3.1) với 0<=a
i
<=9
Như vậy việc biểu diễn u
k
trong hệ cơ số 10 là sự biến đổi u
k
thành tập hữu hạn
n+1 số nguyên a
i
, i=0, 1, …, n thoả 0<=a
i
<=9.
Số các giá trò mà a
i
có được do hệ cơ số biểu diễn u
k
quyết đònh. Trong
trường hợp này u
k
được biểu diễn trong hệ cơ số 10 nên a
i
có 10 giá trò.
Biểu diễn trong hệ cơ số 2
Cách biểu diễn u
k
trong hệ cơ số 10 chưa phù hợp với nguyên tắc mạch điện
của bộ điều khiển số vì u
k
có các phần tử đa trò 0<=a
i
<=9. Ta biến đổi biểu thức
(3.1) về dạng sau
U
k
= x
n
.2
n
+ x
n-1
.2
n-1
+…+ x
1
.2
1
+ x
0
.2
0
với a
i
=0,1 (3.2)
Với việc thay đổi này các tham số x
i
, i=0,1,…,n sẽ trở thành những đại lượng
hai trò 0 hoặc 1. Nếu sử dụng vector hàng để biểu diễn ta sẽ có
U
k
Ỉ
x
n
x
n-1
…x
1
x
0
ta sẽ đi đến dạng biểu diễn thông dụng bằng mạch điện cho tín hiệu số. Mỗi
ô vuông trong cách biểu diễn trên gọi là một bit và mỗi bit là một biến hai trò.
Số các bit của vector x quyết đònh miền giá trò cho u
k
. Với n+1 bit trong (3.2)
thì miền giá trò của u
k
sẽ là tập các số nguyên dương trong khỏang 0<=u
k
<=2
n+1
-1
Một dãy 8 bit được gọi là 1 byte. Hai byte gọi là 1 từ (word) và 2 từ gọi là từ
kép (double word). Trong kỹ thuật PLC nói riêng và điều khiển số nói chung người
ta thường biểu diễn u
k
bằng một byte, 1 từ hoặc 1 từ kép.
Biểu diễn u
k
=205 thành một byte:
1 1001101
Một từ:
0000000011001101
Cách biểu diễn trong hệ cơ số 2 như vậy không ảnh hưởng tới thói quen
tính toán của ta trong hệ thập phân như cộng trư. Tuy nhiên vẫn phải để ý rằng do
x
i
chỉ bằng 0 hoặc 1 nên khi cộng có tổng lớn hơn 1 ta phải viết x
i
= 0 và nhớ 1
sang hàng sau. Ví dụ khi cộng 53 và 27 trong hệ cơ số 2 sẽ có
53= 0 0 1 1 0 1 0 1
27= 0 0 0 1 1 0 1 0
nhớ 1 1 1 1 1
tổng 0 1 0 1 0 0 0 0
Mã hexadecimal của số nguyên dương
Giáo trình PLC Bộ môn Điều khiển tự động
ThS. Lê Văn Bạn S7200-S7300
KS. Lê Ngọc Bích Trang
25
Giống như cách biểu diễn u
k
trong hệ cơ số 10 và 2, trong hệ cơ số 16, số
nguyên u
k
có dạng
U
k
= h
n
.16
n
+ h
n-1
.16
n-1
+…+ h
1
.16
1
+ h
0
.16
0
với 0<=h
i
<=15(3.3)
và tham số h
i
là những biến 16 trò. Các số của h
i
ký hiệu là
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F
trong đó các ký tự khi chuyển sang hệ thập phân sẽ tương đương với
A=10, B=11, C=12, D=13, E=14, F=15
Để bộ điều khiển số hiểu được dạng biểu diễn của u
k
, người ta đã chuyển
các tham số h
i
sang hệ cơ số 2. Do mỗi tham số có 16 giá trò nên người ta cũng chỉ
cần 4 bit là đủ để biểu diễn chúng.
Một mảng 4 bit có tên gọi là một
Nipple
Ví dụ, số nguyên dương u
k
= 7723 trong hệ cơ số 10, khi chuyển sang cơ
số 16 sẽ là 1E2B vì
7723 = 1.16
3
+14.16
2
+2.16+11
1 E 2 B
và do đó dạng Hexadecimal của nó sẽ là
0001111000101011
1 E 2 B
Mã BCD của số nguyên dương
Ta đã biết mã Hexadecimal là kiểu sử dụng biến hai trò để thể hiện các chữ số h
i
, khi
u
k
được biểu diễn trong hệ cơ số 16. Hoàn toàn tương tự, mã BCD là dạng dùng biến hai
trò thể hiện những chữ số 0<a
i
<9 khi biểu diễn u
k
trong hệ cơ số 10 theo công thức
U
k
= a
n
10
n
+ a
n-1
10
n-1
+…+ a
1
10
1
+ a
0
10
0
với a
i
thuộc {0,9}(3.3)
Ví dụ. Uk = 259 được biểu diễn nhờ 3 con số 2, 5 và 9 và do đó mã BCD của nó có
dạng
001001011001
2 5 9
Chuyển đổi số:
¾
Thập phân
R
Nhò phân
VD: Chuyển số nhò phân 11011001 thành số thập phân
U
k
= 1.2
7
+ 1.2
6
+ 0.2
5
+ 1.2
4
+ 1.2
3
+ 0.2
2
+ 0.2
1
+ 1.2
0
128 + 64 + 0 + 16 + 8 + 0 + 0 + 1 = 217
VD: Chuyển số thập phân 217 thành số nhò phân
217:2=108 dư 1
108:2=54 dư 0
54:2 =27 dư 0
27:2 =13 dư 1