Nghiên cứu, thiết kế và chế tạo máy điều chỉnh cảm ứng thay thế nhập khẩu
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.39 MB, 38 trang )
Bộ công thơng
Tổng công ty thiết bị điện việt nam
Công ty cổ phần chế tạo máy điện
việt nam hungary
***************
Báo cáo tổng kết
đề tài nghiên cứu khoa học cấp bộ
Số: 169.07RD/HĐ-KHCN
Đề tài: Nghiên cứu, thiết kế và chế tạo máy
điều chỉnh cảm ứng thay thế nhập khẩu
Cơ quan chủ quản:
Bộ Công Thơng
Chủ nhiệm đề tài:
KS. Hà Đình Minh
Cơ quan chủ trì:
Công ty cổ phần chế tạo máy điện
Việt Nam Hungary
6837
09/5/2008
Hà Nội - 2007
m¸y ®iÒu chØnh c¶m øng
Mục lục
Mở đầu
1
Phần I: Lựa chọn mẫu thiết kế và tính toán thiết kế máy điều chỉnh
cảm ứn
g
I. Tổng quan về máy điều chỉnh cảm ứng
2
II. Lựa chọn mẫu thiết kế
3
III. Tính toán thiết kế máy điều chỉnh cảm ứng
3
A. Tính toán thiết kế phần điện từ
3
B. Tính toán thiết kế kết cấu cơ khí của hệ bánh vít trục vít
15
C. Thiết kế bộ điều khiển tốc độ động cơ xoay hệ bánh vít- trục vít
18
Phần II: Quy trình công nghệ chế tạo máy điều chỉnh cảm ứng
I. Công nghệ chế tạo phần điện từ
21
II. Công nghệ chế tạo các chi tiết cơ khí và quy trình lắp ráp
22
Phần III: Khảo nghiệm và đánh giá kết quả thử nghiệm
I. Kiểm tra xuất xởng
27
II. Đặc tính kỹ thuật đạt đợc và số lợng sản phẩm máy điều
chỉnh cảm ứng chế tạo thử loạt nhỏ
28
III. Kết quả thử nghiệm máy điều chỉnh cảm ứng
28
Kết luận
29
Phụ lục 1: Kết quả thử nghiệm máy điều chỉnh cảm ứng
Phụ lục 2: Các bản vẽ thiết kế máy điều chỉnh cảm ứng
1
Mở đầu
Ngày nay cùng với sự nghiệp công nghiệp hoá hiện đại hoá của đất nớc, các
ngành công nghiệp nói chung, ngành sản xuất máy điện nói riêng, không ngừng
nghiên cứu chế tạo sản phẩm mới, nhằm đáp ứng nhu cầu trong nớc thay thế hàng
nhập ngoại. Máy điều chỉnh cảm ứng là một trong những sản phẩm mới đợc phát
triển trớc mắt nhằm phục vụ cho nhu cầu trong nớc.
Máy điều chỉnh cảm ứng là loại động cơ điện không đồng bộ 3 pha rôto dây
quấn. Nhng đợc thiết kế để làm việc ở chế độ máy biến áp. Đại lợng điện áp ở
đầu ra phụ thuộc vào điện áp nguồn và góc xoay của rôto. Trên rôto đợc gắn trên
hệ trục vít-bánh vít để điều chỉnh góc xoay từ 0
đến 180
0
(ứng với dải điện áp điều
chỉnh từ 40V đến 700V) khi ngừng xoay thì hệ trục vít-bánh vít có tác dụng chống
tự xoaydới tác dụng của mômen điện từ sinh ra trên rôto của máy điều chỉnh
cảm ứng. Đặc điểm nổi bật của máy điều chỉnh điện áp là quá trình điều chỉnh điện
áp vô cấp và không phát sinh tia lửa điện do điều chỉnh không tiếp xúc khác biệt
hoàn toàn với cách điều chỉnh điện áp ở các loại ổn áp dựa trên nguyên lý máy
biến áp tự ngẫu, điều chỉnh điện áp bằng cách điều chỉnh số vòng dây của máy biến
áp nhờ sự dịch chuyển vị trí của chổi than trợt trên bề mặt dây quấn hở của biến
áp tự ngẫu.
Máy điều chỉnh cảm ứng là loại máy điện đặc biệt đợc sử dụng rộng rãi trong
các ngành sản xuất ở những nơi sử dụng điện áp 3 pha có yêu cầu điều áp nh các
nhà máy sản xuất phân bón, các phòng thí nghiệm điện, v.v, máy điều chỉnh cảm
ứng hiện đang sử dụng trong nớc đa phần đợc nhập ngoại từ các nớc: Hungary,
Đức, Đài Loan, Trung Quốc, v.v,
Với năng lực sẵn có, Công ty VIHEM đã chủ động khảo sát, nghiên cứu thiết kế
máy điều chỉnh cảm ứng và đã đợc Bộ Công Nghiệp (Nay là Bộ Công Thơng)
giao cho thực hiện đề tài cấp Bộ:
Nghiên cứu thiết kế và chế tạo máy điều chỉnh cảm
ứng thay thế nhập khẩu n
hằm đa dạng hoá chủng loại sản phẩm, thay thế hàng
nhập ngoại. Nội dung đề tài gồm các phần sau:
Phần I: Lựa chọn mẫu thiết kế và tính toán thiết kế máy điều chỉnh cảm ứng
Phần II: Quy trình công nghệ chế tạo máy điều chỉnh cảm ứng
Phần III: Khảo nghiệm và đánh giá kết quả thử nghiệm
Kết luận
Phụ lục1: Kết quả thử nghiệm máy điều chỉnh cảm ứng
Phụ lục2: Các bản vẽ thiết kế máy điều chỉnh cảm ứng
2
Phần I: lựa chọn mẫu thiết kế và tính toán thiết kế
máy điều chỉnh cảm ứng
I. Tổng quan về máy điều chỉnh cảm ứng
Máy điều chỉnh cảm ứng là một loại máy biến điện áp dựa trên nguyên lý làm việc của
máy điện không đồng bộ ba pha rôto dây quấn với rôto đứng yên.
Kết cấu của máy điều chỉnh cảm ứng giống máy điện không đồng bộ rôto dây quấn
nhng rôto bị giữ chặt bởi một hệ thống trục vít vô tận làm cho rôto không thể tự xoay
đợc mà chỉ có thể quay từ 0ữ180
0
theo sự điều khiển của hệ thống động cơ xoay-trục vít-
bánh vít-rôto.
Máy điều chỉnh cảm ứng đợc phân làm hai loại: máy điều chỉnh cảm ứng đơn dùng
cho công suất nhỏ và máy điều chỉnh cảm ứng kép dùng cho công suất lớn. Với công suất
vài chục KVA trỏ xuống, để đơn giản ngời ta thờng chế tạo máy cảm ứng kiểu đơn. Sau
đây ta xét nguyên lý làm việc của máy điều chỉnh cảm ứng đơn nh sau: Khi dây quấn rôto
nối với nguồn điện thì có dòng điện chạy qua trong đó và sinh ra từ trờng quay trong khe
hở. Từ trờng này sinh ra trong dây quấn stato và rôto s.đ.đ E
R
và E
S
mà trị số tỷ lệ với số
vòng dây tác dụng của các dây quấn, riêng trị số E
S
còn phụ thuộc vào vị trí tơng đối giữa
Rôto và Stato.
Điện áp cảm ứng đầu ra máy điều chỉnh cảm ứng đơn:
)e
k
(Ue
k
U
UEUU
jj
S
=+=
12
1
12
1
112
1
1
&
&
&&&&
(2.1)
Đồ thị véctơ tơng ứng đợc trình bày ở hình dới đây. Nh vậy với góc bất kỳ, nếu chỉ
xét về trị số, ta có:
U
2
=
+ cos
kk
U
12
2
12
1
21
1
(2.2)
Trong đó k
12
là tỷ số biến đổi điện áp.
3
ER
U2max
ER
U2min
ES
ZL
U1
ES
I1
I2
IR
U1
Sơ đồ đấu dây và đồ thị véctơ của máy điều chỉnh cảm ứng đơn
II. lựa chọn mẫu thiết kế.
Trớc khi triển khai tính toán thiết kế chế tạo, chúng tôi đã khảo sát các sản mẫu có đặc
tính kỹ thuật
tốt, kết cấu vững chắc, kiểu dáng gọn đẹp. Sau khi phân tích các thông số kỹ
thuật của từng loại máy điều chỉnh cảm ứng đã lấy mẫu ở trên. Công ty quyết định chọn
thiết kế máy điều chỉnh cảm ứng dựa theo kiểu máy VIN xxx do Hungary chế tạo vì sản
phẩm mẫu có đặc tính kỹ thuật tốt, kết cấu đơn giản, công nghệ chế tạo phù hợp với dây
chuyền sản suất hiện có của Công ty.
III. Tính toán thiết kế máy điều chỉnh cảm ứng.
A. Tính toán thiết kế Phần điện từ
Yêu cầu của phần thiết kế điện từ:
Tính toán thiết kế máy điều chỉnh cảm ứng phải đáp ứng đợc các yêu cầu kỹ thuật dới
đây:
Công suất cảm ứng định mức S : 2,2 (kVA).
Tần số nguồn điện f : 50 (Hz).
Điện áp sơ cấp U
1
: 380 (V).
Dải điều chỉnh điện áp U
2
: 40 ữ 700 VAC
Cấp bảo vệ: IP44
Cấp cách điện: F
4
Từ các yêu cầu trên, việc tính toán thiết kế điện từ máy điều chỉnh cảm ứng đợc thực
hiện theo các bớc nh sau:
1- Kích thớc chủ yếu
Số đôi cực: p =2
Đờng kính ngoài stato D
n
:
Với chiều cao tâm trục h=132mm theo bảng 10.3 sách Thiết kế máy điện Trần Khánh
Hà (STKMĐ). Sơ bộ chọn đờng kính ngoài D
n
=200mm.
Đờng kính trong stato D:
D
n
= (1,55 ữ 1,65).D với 2p =4.
Chọn k
D
=0,61
D = k
D
*D
n
=0,61*200=122 mm.
Chiều dài tính toán của lõi sắt stato l
:
Sơ bộ chọn hệ số cung cực từ
=0,67; hệ số sóng k
s
=1,11; hệ số dây quấn k
d1
=0,933;
D=12,2 (cm); tốc độ từ trờng n=1500 (vg/ph).Trị số A, B
đợc chọn theo kinh nghiệm
thiết kế tải đờng A
r
= (145 A/cm); B
=0,47 (T).
)cm(,
n*D*B*A*k*k*
S**,
l
ds
71212
1016
2
1
7
=
=
Chọn l
= 12,7 (cm), lõi sắt làm thành khối. Sử dụng tôn silíc 2212 dày =0,5 mm của Nga.
Bớc cực
:
)cm(,
,*
p
D
58199
4
212
2
=
=
=
Dòng điện pha định mức trên rôto I
R
:
)A(,
*
*,
U*
S
I
R
3333
2203
1022
3
3
1
===
3- Dây quấn, rnh và gông rôto.
Chọn số rnh của 1 pha dới một cực q2.
Chọn q
2
=2 số rãnh rôto Z
2
= 2pmq
2
= 2*2*3*2 = 24 rãnh
Trong đó: m số pha m =3;
5
2p số cực; 2p=4;
Đờng kính ngoài rôto:
D
=D-2=122-2*0,3=121,4 mm = 12,14cm
Bớc răng rôto t
2
:
)cm(,
,*
Z
D.
t
'
5891
24
1412
2
2
=
=
=
Số vòng dây trong một rnh u
rR
:
169
3333
11455891
2
,
,
**,
I
a.A.t
u
R
rR
R
r
=== (vòng)
Chọn số vòng u
rR
= 68 (vòng) cho dây quấn 2 lớp
Trong đó: - I
R
: dòng điện pha định mức của động cơ.
- Chọn mạch nhánh song song a
R
=1.
Số vòng dây nối tiếp của một pha W
faR
:
272
1
68
22 === **
a
u
q*pW
R
rR
RfaR
(vòng)
Từ thông khe hở không khí
:
)Wb(*,
**,*,*
*,
W*f*k*k*
U*k
faRdqRs
E
3
1
1
1078783363
2725093301114
220970
4
===
Mật độ từ thông khe hở không khí B
:
)T(,
,*,*,
**,
l**
10*
B
4
46460
71258199670
101078783363
34
1
==
=
Sơ bộ định chiều rộng răng rôto:
)cm(,
,*,
,*,
k*l*B
t*l*B
b
cz
z
57950
98031
589146460
2
2
2
===
Chọn B
z2
=1,3 (T) theo kinh nghiệm
Đờng kính trục rôto:
D
t
=0,34*D = 0,34*122 =41,48 mm
chọn đờng kính trục 42 (mm)
Hệ số dây quấn rôto k
dqr
:
Dây quấn rôto 2 lớp bớc lồng y
2
=1-6 (5/6)
6
+ Hệ số bớc ngắn
9660
26
5
2
,)*sin()sin(k
r
R
y
=
=
=
;
+ Hệ số bớc rải
9660
2
30
2
2
30
2
2
2
,
sin
sin
sinq
qsin
k
r
r
r
r
R
r
==
=
;
0
0
2
0
30
24
3602360
===
*
z
*p
r
Hệ số dây quấn k
dqr
= k
yR
*k
rR
= 0,966*0,966 = 0,933
Điện áp rôto U
faR
:
E
R
= k
E
*U
faR
= 0,97*220 = 213,4 (V)
Tính toán dây dẫn rôto:
- Chọn mật độ dây dẫn rôto J
R
=5,0 (A/mm
2
)
- Tiết diện dây dẫn
)mm(,
,
,
j
I
S
R
R
R
2
6660
05
3333
===
Chọn dây n
2
=; d/d
cđ
= 0,9/0,965; s= 0,636 mm
2
J
R
= 3,333/0,636 = 5,24(A/mm
2
)
Kích thớc rnh rôto:
h
r2
= 30,7mm ; h
12
=24,5 mm.
d
1
=8,2 mm ; b
42
=2 mm.
d
2
=3,2 mm ; h
42
=0,5mm
Bề rộng răng rôto:
)mm(,,
),*,,(
d
Z
)hdD(
b
'
'
z
487628
24
502284121
2
1
2
421
2
=
=
=
)mm(,,
),,*,(
d
Z
)dh*D(
b
r
'
''
z
073523
24
2373024121
2
2
2
2
2
=
+
=
+
=
)mm(,
,,
bb
b
"
z
'
z
tb
785
2
07354876
2
22
2
=
+
=
+
=
- Tổng diện tích rãnh stato:
)mm(,,*,,*
,,*,*,
b*hh*
ddd*
*d
S
rS
2
22
424242
21
2
2
2
061710250524
2
2823
8
28
8
23
288
1
=+
+
+
+
=
+
+
+
+
=
Chiều cao gông rôto:
30,7
24,5
3,2
8
,
2
0,5
2
Rãnh rôto
7
mm,,,
,
dh
DD
h
r
t
'
g
533923
6
1
730
2
424121
6
1
2
222
=+
=+
=
2- Dây quấn, rnh stato và khe hở không khí.
Chọn số rnh của 1 pha dới một cực q
1
.
Chọn q
1
=3 số rãnh stato Z
1
= 2pmq
1
=2*2*3*3=36 rãnh
Kiểu dây quấn:
Chọn dây quấn hai lớp bớc ngắn với y=8
8890
9
8
,
y
S
==
=
- Hệ số dây quấn stato k
dqS
:
+ Hệ số bớc ngắn
9850
29
8
2
,)sin()sin(k
S
S
y
=
=
=
;
+ Hệ số bớc rải 960
2
20
3
2
20
3
2
2
,
sin
sin
sinq
qsin
k
S
S
S
S
S
r
==
= ;
0
0
1
0
20
36
3602360
===
*
z
p
S
k
dqS
=k
yS
*k
rS
=0,985*0,96=0,9452
Bớc răng stato t
1
:
)cm(,
,*
Z
D.
t 0651
36
212
1
1
=
=
=
Chọn số rnh của 1 pha dới một cực q
1
.
Chọn q
1
=3 số rãnh stato Z
1
= 2pmq
1
=2*2*3*3=36 rãnh
Bớc răng stato t
1
:
)cm(,
,*
Z
D.
t 0651
36
212
1
1
=
=
=
Điện áp cảm ứng đầu ra máy điều chỉnh cảm ứng đơn theo (2.1) và (2.2)
ta có:
U
2
=
+ cos
kk
U
12
2
12
1
21
1
Khi = 0
0
thì U
2min
= )
k
(U
12
1
1
1
và khi = 180
0
ta có U
2max
= )
k
(U
12
1
1
1 +
Chọn U
2mindây
= 40 V U
2minfa
= 40/ 3 = 23V ; U
1
= 220
8
k
12
= 220/220-23 =1,117
U
2maxdây
= 700 V U
2maxfa
= 700/ 3 = 404V ; U
1
= 220
k
12
= 220/404-220 =1,195
Vậy để đảm bảo điện áp ra tối thiểu 40V ta chọn k
12
= 1,117
Tỷ số biến áp giữa Rôto và Stato tính theo công thức:
k
12
=
dqSfaS
dqRfaR
K*W
K*W
=
9450
9330272
,*W
,*
faS
= 1,117
W
faS
= 272*0,933/0,945*1,117 241(vòng)
W
faS
=
1
a
u
*q*p
rS
S
= 241 = 2*3*u
rS
/ 1 u
rS
= 241/2*3 = 40,2 (vòng) (2.3)
Để bù điện áp rơi trên điện trở và điện kháng tản của bộ dây ta phải chọn số vòng
dây ở Stato lớn hơn khoảng 5% giá trị tính toán. Vậy ta chọn số vòng dây tác dụng
trong một rãnh Stato là: u
rS
= 40*1,05 = 42 (vòng) và thay vào công thức (2.3) ta
đợc số vòng một pha trên dây quấn Stato là W
faS
= 252 (vòng)
Điện áp cảm ứng trên dây quấn Stato E
faS
:
)V(,
,*
,***,
k*w
k*w*U*k
E
dqRfaR
dqSfaSfaE
S
fa
252200
9330272
9450252220970
1
===
)V(,,*E*U
S
fadayS
43634625220033 ===
Dòng điện cảm ứng trong dây quấn Stato:
Với hệ số công suất chọn Cos = 0,8 ta tra đợc K
I
= 0,77
)A(,
,*
,**,
*,
k*w*m
k*w*I*m
kI
dqSfS
dqRfRR
IS
7352
9450252
933027243
770
2
1
===
Tiết diện và đờng kính dây stato:
Dây quấn Stato cấp dòng trực tiếp cho tải I
S
= I
2
. Do vậy, để đảm bảo khả năng quá
tải có thể xảy ra, ta chọn mật độ dòng điện trong dây quấn stato nhỏ:
J
S
= 2ữ3(A/mm
2
)
Chọn 2 sợi chập dây êmay cách điện cấp F sản xuất tại Hàn Quốc có kích thớc:
d/d
cđ
= 0,9/0,965; s= 0,636 mm
2
chập 2 sợi (n
1
=2)
Tiết diện tổng s
cuS
=2*0,636=1,272mm
2
)mm/A(,
,
,
s
I
J
cuS
S
2
2
152
2721
7352
===
9
Sơ bộ định chiều rộng răng stato bz
1
:
Chọn mật độ từ cảm trên răng stato B
Z1
=0,85 (T) và hệ số ép chặt lõi sắt k
c
=0,98
)cm(,
,*,
,*,
k*l*B
t*l*B
b
cz
z
945
980850
065146460
1
1
1
===
Sơ bộ định chiều cao gông stato h
g1
:
)cm(,
,*,*,*
**,
k*l*B*
*
h
cg
g
8121
9807128402
101078783363
2
10
43
1
4
1
==
=
Chọn mật độ từ cảm trên gông B
g1
=0,84 (T)
Kích thớc rnh stato:
Hình dạng và kích thớc rãnh stato (Hình bên)
h
r1
=20,8mm ; h
12
=14 mm.
d
1
=5,5 mm ; b
41
=2,5 mm.
d
2
=7,7 mm ; h
41
=0,2 mm
Kiểm tra hệ số lấp đầy rnh stato k
lđS
:
- Tổng diện tích rãnh stato:
)mm(,,*,*
,,*,*,
b*hh*
ddd
d
S
rS
2
22
414142
21
2
2
2
06128522014
2
7755
8
77
8
55
288
1
=+
+
+
+
=
+
+
++
=
- Diện tích dây đồng trong rãnh stato:
S
cuS
=s
cuS1
*u
rS
=1,272*42=53,242 (mm
2
)
Hệ số lấp đầy
4170
06128
24253
,
,
,
S
S
k
rS
S
cu
S
ld
=== đảm bảo lồng dây không chắt quá.
Bề rộng răng stato :
)mm(,,
),,*(
d
Z
)dhD(
b
'
z
661555
36
55202122
2
1
1
141
1
=
+
+
=
++
=
)mm(,,
),,*(
d
Z
)dhD(
b
r
''
z
905577
36
778202122
2
2
1
21
1
=
+
=
+
=
)mm(,
,,
bb
b
"
z
'
z
tb
7835
2
90556615
2
11
1
=
+
=
+
=
Chiều cao gông stato :
0,2
2,5
14
7,7
20
,
8
5,5
Rãnh Stato
10
cm948,1mm48,197,7
6
1
8,20
2
122200
d
6
1
h
2
DD
h
21r
n
1g
==+
=+
=
Khe hở không khí :
37201012225010250
33
,*,.D, =+=+=
(mm);
Vì máy cảm ứng là máy điện quay đặc biệt chỉ làm việc ở chế độ tĩnh nên ta chọn
khe hở không khí = 0,3 mm = 0,03 cm
4- Tính toán mạch từ.
Hệ số khe hở không khí:
1721
03020850651
0651
11
1
1
,
,*,,
,
*t
t
k =
=
=
2085
30525
3052
5
2
41
2
41
1
,
./,
),/,(
/b
)/b(
=
+
=
+
=
0781
0308135891
5891
22
2
2
,
,,*,,
,
*t
t
k =
=
=
813
30025
3002
5
2
42
2
42
1
,
./,
),/,(
/b
)/b(
=
+
=
+
=
k
= k
1
*k
2
= 1,172*1,078 =1,263
Lá tôn dùng thép kỹ thuật điện ký hiệu 2212:
Sức từ động khe hở không khí:
F
= 1,6*B
*k
**10
4
= 1,6* 0,4646*1,263*0,03*10
4
=606,24(A)
Mật độ từ thông ở răng stato:
)T(,
,*,
,*,
k*l*b
t*l*B
B
ctb
Z
8740
9805780
065146460
1
1
1
===
Cờng độ từ trờng trên răng stato theo bảng V-6 ở phụ lục V (STKMĐ):
H
z1
= 3,275(A/cm).
Sức từ động trên răng stato:
F
z1
= 2h
z1
*H
z1
=2*1,823*3,275= 11,941(A)
cm823,1mm23,18
3
7,7
8,20
3
d
hh
2
1r1z
====
Mật độ từ thông ở răng rôto:
11
)T(,
,*,
,*,
k*l*b
t*l*B
B
ctb
z
3031
9805780
589146460
2
2
2
===
Cờng độ từ trờng trên răng rôto theo bảng V-6 ở phụ lục V (STKMĐ):
H
z2
= 7,282 (A/cm).
Sức từ động trên răng rôto:
F
z2
= 2h
z2
*H
z2
=2*2,91*7,282= 42,381(A)
cm,mm,
,
,,
d
hhh
rz
912129
3
23
50730
3
2
4222
====
Hệ số bo hòa răng k
z
:
091
24606
381429411124606
21
,
,
,,,
F
FFF
k
Zz
z
=
+
+
=
++
=
Trị số này gần đúng với trị số giả thiết ban đầu nên không cần tính lại.
Mật độ từ thông trên gông stato:
)T(,
,*,*,*
**,
k*l*h*
*
B
cg
g
780
98071294812
101078783363
2
10
43
1
4
1
==
=
Cờng độ từ trờng trên răng stato theo bảng V-9 ở phụ lục V (STKMĐ):
H
g1
= 1,86(A/cm).
Chiều dài mạch từ ở gông stato:
cm,mm,
),(
p
)hD(
L
gn
g
1781478141
4
4819200
2
1
1
==
=
=
Sức từ động trên gông stato:
F
g1
= L
g1
*H
g1
=14,178*1,86 = 26,371(A)
Mật độ từ thông trên gông rôto:
)T(,
,*,*,*
**,
k*l*h*
*
B
cg
g
5971
98071295302
101078783363
2
10
43
2
4
2
==
=
Cờng độ từ trờng trên răng stato theo bảng V-9 ở phụ lục V (STKMĐ):
H
g1
= 13,46 (A/cm).
Chiều dài mạch từ ở gông stato:
mm,
),(
p
)hD(
L
gt
g
4740
4
53942
2
2
2
=
+
=
+
= 4,05 cm
Sức từ động trên gông stato:
12
F
g2
= L
g2
*H
g2
=4,05*13,46 = 54,51(A)
Tổng sức từ động của mạch từ:
F
= F
+ F
Z1
+F
Z2
+F
g1
+F
g2
=606,24 + 11,941 + 42,381+ 26,371+ 54,51 = 741,446(A)
Hệ số bo hòa toàn mạch:
2231
24606
446741
,
,
,
F
F
k ===
à
Dòng điện từ hóa :
)A(,
,**,
,*
k*w*,
F*p
I
dqRfaR
1642
933027272
4467412
72
===
à
5- tham số ở chế độ định mức.
Chiều dài phần đầu nối của dây quấn stato:
l
đ1
= k
đ1
*
y
+ 2B = 1,3*9,97 + 2*1,5 = 15,96 (cm)
- k
đ1
- hệ số kinh nghiệm
- B =1,5 cm phần thẳng bin dây kéo dài ra ngoài lõi thép
Trong đó:
)cm(97,9)mm(7,99
36
8*)8,20122(
Z
y*)hD(
1
1r
y
==
+
=
+
=
Chiều dài trung bình nửa vòng dây của dây quấn stato::
l
tb
= l
+ l
đ1
= 12,7 + 15,96 = 28,66 (cm)
Chiều dài dây quấn một pha của stato:
L
1
= 2*l
tb
*W
1
*10
-2
= 2*28,66*252*10
2
= 144,446 (m)
Điện trở tác dụng của dây quấn stato:
)(,
,**
,
*
s*a*n
L
r ===
4692
272111
446144
46
1
111
1
751
Chiều dài phần đầu nối của dây quấn rôto:
l
đ2
= k
đ2
*
y
+ 2B = 1,2*5,936+ 2*1,5 = 10,12 (cm)
- k
đ2
- hệ số kinh nghiệm
- B =1,5 cm phần thẳng bin dây kéo dài ra ngoài lõi thép
Trong đó:
)cm(,)mm(,
*),,(
Z
y*)hD(
r
'
y
93653659
24
57304121
1
22
==
=
=
Chiều dài trung bình nửa vòng dây của dây quấn rôto:
13
l
tb
= l
+ l
đ2
= 12,7 + 10,12 = 22,82 (cm)
Chiều dài dây quấn một pha của rôto:
L
2
= 2*l
tb
*W
2
*10
-2
= 2*22,82*272*10
-2
= 124,141 (m)
Điện trở tác dụng của dây quấn rôto:
)(,
,**
,
*
s*a*n
L
r ===
2434
636011
141124
46
1
222
1
752
Hệ số từ dẫn tản rnh stato:
'
41
412411
1r
k)
b
h
b
h
b2
b
785,0(k
b3
h
+++=
3791920
52
20
55
450
552
52
7850940
553
5812
1
,,)
,
,
,
,
,*
,
,(,
,*
,
r
=+++=
92,0
4
9
8
31
4
31
k
'
=
+
=
+
=
; h
1
=14-0,45-0,2-0,77 = 12,58; b=5,5 ;b
41
=2,5;
94,092,0
4
3
4
1
k
4
3
4
1
k
''
=+=+=
; h
2
= 0,45; h
41
=0,2.
Hệ số từ tản phần đầu nối:
8440589
9
8
6409615
712
3
340640340
1
1
1
,),**,,(*
,
*,)**,l(*
l
q
*,
dd
==+=
2,22384403791
111
=+=++=
,,
dtr
Điện kháng dây quấn stato :
)(,,*
*
,
***,
pq
l
*)
w
(*
f
*,x =
==
36122232
32
712
100
252
100
50
1580
100100
1580
2
1
1
2
11
1
Hệ số từ tản rnh rôto :
551
2
50
282
2
660
061718
28
1
283
1426
2
660
8
1
3
2
2
4
44
2
2
1
2
,
,
,*
,)
,*
),(*
(
,*
,
b
h
b*
b
,)
S*
b*
(
b*
h
r
r
=+
+
=
+
+
=
h
1
=26,14 mm; b = 8,2mm ; b
42
=2mm; h
42
=0,5
Diện tích rãnh rôto S
rR
= 171,06 mm
2
Hệ số từ tản phần đầu nối:
14
4105896401210
13
2
670640670
2
2
2
,),*,,(*,)*,l(
l
q
*,
dd
===
961410551
222
,,,
dr
=+=+=
Điện kháng rôto :
)(,,*
*
,
)(*,*
q*p
l
*)
W
(
f
*,x
faR
===
6373961
22
712
100
272
100
50
1580
100100
1580
2
2
2
2
2
Tính lại k
E
:
96420
220
63731642220
1
21
,
,*,
U
x*IU
k
E
=
=
=
à
Trị số này không sai khác so với trị số ban đầu 0,6% nên không cần tính lại.
Bảng kết quả tính toán thiết kế điện từ máy điều chỉnh cảm ứng 2,2kVA:
Kích thớc cơ bản Thông số dây quấn
Đờng kính ngoài Stato D
n
= 200 mm
Đờng kính trong Stato D = 122 mm
Chiều dài lõi thép L
fe
= 127 mm
Số rãnh Stato/Rôto Z
1
/ Z
2
= 36/24
Khe hở không khí = 0,3 mm
Dây quấn Stato : 2x0,9
Số vòng dây 1 bin W
s
=21 Vòng
Dây quấn 2 lớp bớc lồng :
y = 1 ữ 7; 9; 11;
Số mạch nhánh song song a=1
Dây quấn Rôto: 0,9
Số vòng dây 1 bin: W
r
=34 Vòng
Dây quấn2 Lớp bớc lồng : y = 1 ữ 6 ;
Số mạch nhánh song song a=1
Kích thớc rãnh Stato và Rôto
30,7
24,5
3,2
8
,
2
0,5
2
Rãnh Rôto
0,2
2,5
14
7,7
20
,
8
5,5
Rãnh Stato
15
B. Tính toán thiết kế kết cấu cơ khí của hệ bánh vít trục
vít:
Để điều chỉnh điện áp ra ta phải điều chỉnh vị trí tơng đối giữa rôto và stato,
để thực hiện đợc thao tác này ta phải có bộ điều chỉnh cơ-điện vừa có tác dụng thay
đổi vị trí của rôto một cách dễ dàng vừa phải thắng đợc mômen điện từ chống trôi
vị trí của rôto trong suốt quá trình làm việc. Từ những yêu cầu trên ta chọn hệ động
cơ-bánh vít trục vít để điều khiển xoay và giữ rôto.
Bộ điều khiển máy điều chỉnh cảm ứng gồm: 01 bộ điều khiển tốc độ động cơ
xoay + 01 bộ bánh vít-trục vít + 01 động cơ một chiều dùng để xoay rôto có công
suất 200W, với dải tốc độ điều chỉnh từ 600 ữ 1500 vg/ph và một hệ bánh vít-trục
vít. Với yêu cầu là điện áp đầu ra từ 40 ữ 700V tơng ứng với góc điều chỉnh từ 0 ữ
180
0
, thời gian điều chỉnh từ vị trí điện áp cực tiểu đến vị trí điện áp cực đại khoảng
2 phút. Ngoài ra để đảm bảo kích thớc bộ điều khiển, tính thẩm mỹ, khả năng
truyền động giữa 2 trục chéo nhau (góc 90
0
) ta chọn truyền động trục vít, bánh vít 2
cấp với các thông số cơ bản của bộ truyền nh sau:
d
a
2
d
2
p
1
b
1
df
1
d
1
a
w
ha
2
ha
1
b
2
da
2
d
2
df
2
d
aM2
2
c
df
1
d
1
da
1
h
16
- Bộ truyền trục vít-bánh vít cấp 1:
+ Vật liệu chế tạo trục vít là thép C45
+ Vật liệu chế tạo bánh vít là thép C45
+ Số mối ren của trục vít: Z
1
= 1
+ Số răng bánh vít: Z
2
= 60
+ Mô đun: m = 1
+ Bớc ren của trục vít (bớc ngang của bánh vít): t = .m = 3,14 x 1 = 3,14
+ Góc ăn khớp (góc profin ren trục vít): = 20
0
+ Hệ số đờng kính: q = 16
+ Hệ số dịch chỉnh: x = 0
+ Đờng kính vòng chia của trục vít: dc
1
= q.m = 16 x 1 = 16
+ Chiều dài phần có ren của trục vít: L = 30
+ Chiều rộng của bánh vít: B = 12
+ Hệ số chiều cao răng: f
0
= 1
+ Hệ số khe hở đờng tâm: C
0
= 0,25
+ Góc vít:
tg =
0625,0
16
1
2
1
==
+
xq
z
=> 3
0
3435
+ Đờng kính vòng lăn trục vít: d
1
= dc
1
= 16
+ Đờng kính vòng chia (vòng lăn) bánh vít: d
2
= dc
2
= Z
2
.m = 60.1 = 60
+ Đờng kính vòng đỉnh trục vít: De
1
= dc
1
+ 2f
0
m = 16 + 2.1.1 = 18
+ Đờng kính chân ren trục vít:
Di
1
= dc
1
- 2m(f
0
+ C
0
) = 16 - 2.1.(1 + 0,25) = 13,5
+ Đờng kính vòng đỉnh răng trong mặt cắt chính bánh vít:
De
2
= (Z
2
+ 2f
0
)m = (60 + 2.1)1 = 62
+ Đờng kính vòng chân ren bánh vít:
Di
2
= dc
2
-2m(f
0
+ C
0
) = 60 - 2.1.(1 + 0,25) = 57,5
+ Góc ôm:
686,0
1.5,018
12
5,0
sin
1
=
=
=
mDe
B
=> = 43
0
1730
+ Khoảng cách trục:
17
38
2
6016
2
21
=
+
=
+
=
dd
A
- Bộ truyền trục vít bánh vít cấp 2:
+ Vật liệu chế tạo trục vít là thép C45
+ Vật liệu chế tạo bánh vít là thép C45
+ Số mối ren của trục vít: Z
1
= 1
+ Số răng bánh vít: Z
2
= 80
+ Mô đun: m = 1,25
+ Bớc ren của trục vít (bớc ngang của bánh vít):
t = .m = 3,14 x 1,25 = 3,925
+ Góc ăn khớp (góc profin ren trục vít): = 20
0
+ Hệ số đờng kính: q = 20
+ Hệ số dịch chỉnh: x = 0
+ Đờng kính vòng chia của trục vít: dc
1
= q.m = 20 x 1,25 = 25
+ Chiều dài phần có ren của trục vít: L = 35
+ Chiều rộng của bánh vít: B = 15
+ Hệ số chiều cao răng: f
0
= 1
+ Hệ số khe hở đờng tâm: C
0
= 0,25
+ Góc vít:
tg =
05,0
20
1
2
1
==
+
xq
z
=> 2
0
5145
+ Đờng kính vòng lăn trục vít: d
1
= dc
1
= 25
+ Đờng kính vòng chia (vòng lăn) bánh vít: d
2
= dc
2
= Z
2
.m = 80.1,25 = 100
+ Đờng kính vòng đỉnh trục vít: De
1
= dc
1
+ 2f
0
m = 25 + 2.1.1,25 = 27,5
+ Đờng kính chân ren trục vít:
Di
1
= dc
1
- 2m(f
0
+ C
0
) = 25 - 2.1,25.(1 + 0,25) = 21,875
+ Đờng kính vòng đỉnh răng trong mặt cắt chính bánh vít:
De
2
= (Z
2
+ 2f
0
)m = (80 + 2.1)1,25 = 102,5
+ Đờng kính vòng chân ren bánh vít:
Di
2
= dc
2
- 2m(f
0
+ C
0
) = 100 - 2.1,25.(1 + 0,25) = 96,875
18
+ Góc ôm:
558,0
25,1.5,05,27
15
5,0
sin
1
=
=
=
mDe
B
=> = 33
0
5538
+ Khoảng cách trục:
5,62
2
10025
2
21
=
+
=
+
=
dd
A
C. thiết kế bộ điều khiển tốc độ động cơ xoay hệ
bánh vít-trục vít:
Bộ điều khiển tốc độ của động cơ xoay hệ bánh vít-trục vít nhằm mục đích
thay đổi vị trí giữa rôto và stato để điều chỉnh điện áp ra từ 40V đến 700V, tốc
độ điều chỉnh có thể thay đổi đợc bằng cách xoay chiết áp gắn trên thân máy
điều chỉnh cảm ứng. Các thông số chủ yếu của bộ điều khiển và động cơ xoay
nh sau:
Động cơ xoay: động cơ một chiều 200W điện áp 12VDC, dòng điện định mức
20A , tốc độ quay trên đầu trục là 3000vg/ph.
Bộ điều khiển động cơ xoay: Bộ điều khiển chỉnh lu 1/2 chu kỳ có bộ phận
đảo chiều bằng công tắc tơ dùng để tăng(chiều thuận) và giảm(chiều ngợc)
điện áp ra, điện áp điều chỉnh đợc khống chế ở 3 đến 8VDC nhằm duy trì
dòng điện làm việc không vợt quá 12A tránh quá dòng cho thyristor.
Thyristor Th chọn loại SC60C-40 có điện áp ngợc 400V, dòng điện 60A;
điốt xả D1 loại 50A điện áp ngợc 400V; điốt xả và thyristor gắn trên cánh
tản nhiệt làm mát tự nhiên.
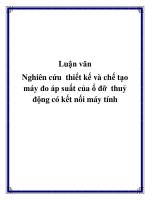
Sơ đồ mạch điều khiển nh sau:
19
M
44
44
A2
31
A1
32
1
K
A1
động cơ xoay
LED
R
LS1
LS2
2
K1
K
A2
31
K2
A1
32
A2
V/4/T2
S/3/L2
Công tắc
K1
R/1/L1
U/2/T1
LS2
LS1
RUN
Th
V/4/T2
K2
S/3/L2
43
K1
43
K2
K1 K2
U/2/T1
R/1/L1
D1
R4
R7R5
C2
Dz
R1
R2
C1
T1
T2
R8
B1
D2
R6
R3
R9
Nguyên lý hoạt động:
Công tắc 2 ngả dùng để đảo chiều động cơ xoay, tuỳ theo mục đích điều chỉnh
tăng hay giảm điện áp ta có thể bật công tắc sang bên chạy thuận hoặc hoặc
chạy ngợc. Khi bật công tắc sang bên chạy thuận (nh trạng thái ở hình vẽ) công
tắc tơ K1 có điện, công tắc tơ K2 bị ngắt điện, K1 đóng dẫn tới tiếp điểm K1 đóng,
động cơ đợc khép mạch qua A1-K1-M-K1-B1-Th-A2 đồng thời cực G của thyristor
Th cũng đợc khép mạch tới mạch điều khiển qua tiếp điểm phụ K1 và nút ấn RUN.
Tơng tự nh thế khi chạy ngợc.
Mạch điều khiển chạy động cơ đợc thiết kế theo chế độ nhấn-nhả để chỉnh tinh
điện áp ở đầu ra của máy điều chỉnh cảm ứng, khi ấn nút RUN động cơ xoay rôto
qua bộ bánh vít-trục vít thực hiện thao tác tăng hay giảm điện áp, khi điện áp đầu ra
đạt tới giá trị mong muốn ta chỉ cần nhả nút ấn làm cực G mất điện dẫn tới Th khoá
và động cơ ngừng xoay, vị trí của rôto đợc giữ đứng yên nhờ cơ cấu hãm của hệ
bánh vít-trục vít và nh vậy điện áp ra đợc xác lập. Tuỳ theo yêu cầu đáp ứng
nhanh hay chậm, điều chỉnh thô hay tinh mà ta có thể chỉnh đợc tốc độ của động
cơ xoay nhanh hay chậm bằng cách chỉnh điện áp một chiều cấp vào động cơ xoay
qua bộ chỉnh lu có điều khiển bằng cách điều khiển góc mở của thyristor Th nhờ
20
điều chỉnh chiết áp R9. Khi ta giảm giá trị điện trở giảm dẫn tới thời gian nạp tụ
điện C2 qua R8-R9 giảm khiến góc mở Th giảm làm tăng điện áp dẫn tới động cơ
M, tăng tốc độ động cơ. Ngợc lại, khi ta tăng trị số R9 thời gian nạp tụ điện C2
tăng làm tăng góc mở Th dẫn tới giảm điện áp dẫn qua Th tới động cơ M, giảm tốc
độ động cơ. Theo thiết kế đang sử dụng điện áp cung cấp cho động cơ có thể điều
chỉnh trong giới hạn từ 3 ữ 8 VDC ứng với tốc độ động cơ từ 600 ữ 1500 vg/ph.
Công tắc hành trình LS1 và LS2 lần lợt thiết lập ngỡng quay thuận và ngỡng
quay ngợc của rôto, sự xoay của rôto đợc khống chế trong góc điều chỉnh 180
0
ứng với điện áp điều chỉnh từ 40 ữ 700V, khi rôto xoay đến ngỡng thuận thì tiếp
điểm thờng đóng LS1 ngắt làm công tắc tơ K1 mất điện làm động cơ xoay dừng,
công tắc thờng mở LS1 đóng điện cho đèn LED bật sáng báo vị trí tới hạn. Tơng
tự nh vậy đối với công tắc hành trình LS2 khi động cơ quay tới ngỡng quay
ngợc.
21
Phần II: quy trình Công nghệ chế tạo máy điều chỉnh cảm ứng
Quy trình công nghệ sản xuất máy điều chỉnh cảm ứng:
Quy trình chủ yếu sản xuất máy điều chỉnh cảm ứng đợc thể hiện trong bảng 2-1:
Bảng 2-1
Các quá trình công nghệ gia công Chi tiết hoặc nhóm chi tiết chế tạo hoặc gia công
- Đúc gang có độ bền cao hoặc
gang xám.
- Dập nguội.
- Gia công cắt gọt cơ khí.
- Công nghệ chế tạo bối dây, gia
công vật nối mềm và cứng.
- Chế tạo các chi tiết cách điện.
- Sơn chống gỉ .
- Lắp ráp .
- Sơn trang trí.
- Thân, nắp, nắp mỡ, thân nắp hộp cực máy điều
chỉnh cảm ứng.
- Lá tôn stato, rôto, nắp che quạt gió.
- Thân, nắp, nắp mỡ, thân nắp hộp cực, thân nắp
hộp bánh vít-trục vít, trục, bánh vít, trục vít, v v
- Quấn, bọc cách điện bối dây và cuộn dây, tẩm
cách điện và ép bối dây, hàn đấu dây.
- Cắt gọt nêm rãnh, giấy cách điện.
- Các chi tiết: Thân, nắp, nắp mỡ, hộp cực, rôto,
lòng trong stato v. v
- Lắp ráp cụm chi tiết và lắp ráp hoàn chỉnh máy
điều chỉnh cảm ứng.
I. công nghệ chế tạo phần điện từ:
Phần điện từ trong máy điều chỉnh cảm ứng bao gồm: lá tôn stato, lá tôn rôto, lõi thép
stato, lõi thép rôto, bối dây stato. Nói chung các bớc công nghệ chế tạo điện từ của máy
điều chỉnh cảm ứng gồm các bớc:
1. Công nghệ chế tạo lá tôn:
- Vật liệu: tôn silíc của Nga 2212, =0,5 mm
- Các lá tôn đợc dập nguội trên máy dập SD63 lực dập phù hợp đảm bảo tôn ít bị biến
dạng, khuôn dập đợc chế tạo trên máy CNC có độ chính xác cao để giảm độ ba via.
2. Công nghệ ép lõi thép:
Quy trình công nghệ ép lõi thép của máy điều chỉnh cảm ứng đợc ép đúng kích thớc
thiết kế, đạt hệ số ép chặt k
c
= 0,98 và đợc hãm giữ bằng gông ép.
3. Công nghệ chế tạo bối dây stato, rôto:
22
Bối dây stato và của rôto của máy điều chỉnh cảm ứng chế tạo đảm bảo đúng tiết diện
dây, số sợi chập và số vòng đảm bảo tỷ số biến áp giữa sơ cấp và thứ cấp :
- Dây quấn stato là dây đồng cách điện cấp F, ký hiệu: PEW của Hàn Quốc.
- Bin dây đợc quấn trên máy quấn dây chuyên dùng có hệ thống đếm số vòng dây tự
động.
4. Lồng đấu bối dây vào stato và rôto:
- Lót cách điện rãnh stato và rôto bằng bìa cách điện cấp F.
- Lồng bin dây vào rãnh.
- Lót cách điện giữa các tổ bối dây, giữa các pha bằng bìa cách điện cấp F.
- Nêm miệng rãnh bằng Téctôlít thuỷ tinh.
- Hàn đấu các tổ bối dây trên máy hàn chuyên dùng.
- Cách điện các mối nối bằng gen sợi thuỷ tinh tẩm sơn cách điện.
- Đầu bin dây đợc băng cách điện thuỷ tinh.
- Kiểm tra cách điện pha-pha, pha-vỏ bằng máy H2 CPS.
- Thử cao áp bằng máy thử cao áp HS 0110, điện áp thử 1500 V.
5. Sấy stato, rôto lồng dây:
- Sấy mộc cụm stato, rôto lồng dây.
Tẩm sơn cách điện bằng sơn (SPV128) của Hàn Quốc, sấy cụm stato, rôto lồng dây trong
lò sấy tuần hoàn SZLB 112.
6. ép stato lồng dây vào thân.
7. Kiểm tra cao áp và đo điện trở một chiều của máy điều chỉnh cảm ứng.
II. công nghệ chế tạo các chi tiết cơ khí và Quy trình lắp ráp:
1. Công nghệ chế tạo thân máy điều chỉnh cảm ứng (Hình 1):
Thân máy điều chỉnh cảm ứng là bộ phận cơ bản nhất quyết định hình dáng bên ngoài
và độ bền kết cấu, bởi vậy thân máy điều chỉnh cảm ứng phải đạt đợc các yêu cầu:
- Đối với thân đợc chế tạo bằng phơng pháp đúc phải có hệ thống rót đảm bảo dẫn kim
loại vào khuôn êm.
- Kết cấu của thân phải đảm bảo các chỗ chuyển tiếp từ thành dày sang thành mỏng
không đột ngột vì khi nguội đi sẽ gây ra ứng lực bên trong ở những chỗ thành mỏng.