Thiết kế, chế tạo robot tự hành mini có kết nối trên điện thoại
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.61 MB, 76 trang )
TRƯỜNG ĐẠI HỌC LÂM NGHIÊP VIỆT NAM
KHOA CƠ ĐIỆN VÀ CƠNG TRÌNH
BỘ MƠN KỸ THUẬT ĐIỆN VÀ TỰ ĐỘNG HĨA
BÁO CÁO KHÓA LUẬN TỐT NGHIỆP
Tên đề tài: Thiết kế, chế tạo Robot tự hành mini có kết nối trên
điện thoại
Giáo viên hướng dẫn : TS. Đinh Hải Lĩnh
Sinh viên thực hiện : Đặng Khương Duy
MSV
: 1951081052
Lớp
: 64 – CNCĐT
Khóa
: 2019 - 2023
HÀ NỘI – NĂM 2023
LỜI MỞ ĐẦU
1. Lý do chọn đề tài
Cùng với sự phát triển nhanh chóng trong lĩnh vực Khoa học – Kỹ thuật, robot
đang ngày càng trở nên phổ biến trong trong đời sống của con người. Nhờ có sự phát
triển của công nghệ chế tạo robot, con người ngày nay đã có thể được thay thế bởi
máy móc trong nhiều công việc khác nhau như: tham gia dây chuyền sản xuất, trị liệu
y tế, thám hiểm trong những môi trường khắc nghiệt, ...
Xe tự hành (AGV – automated guided vehicle) đã xuất hiện trong các nhà máy
từ đầu những năm 1950, một chiếc xe không người lái, được sản xuất bởi Barrett
Electronics, ở Illinois, có thể đi theo trường điện từ của một sợi dây đặt trên trần nhà
máy hoặc được nhúng trong sàn nhà máy. Tuy nhiên, kể từ khi Amazon mua lại nhà
sản xuất AGV Kiva Systems vào năm 2012 và quyết định ngừng bán và sử dụng robot
Kiva của Amazon để cải thiện hậu cần của họ, đã có sự gia tăng lợi ích đối với ngành
cơng nghiệp AGV. Theo một bài báo năm 2017 từ một nhà phân tích của Loup
Ventures, thị trường AGV có thể là vào năm 2025, một trong những thị trường phụ
phát triển nhanh nhất trong tồn bộ ngành cơng nghiệp robot, với tỷ lệ tăng trưởng
hàng năm là 35% trong thập kỷ 2015-2025. Những lợi ích của robot vận chuyển
(AGV)
An tồn
Giảm thiệt hại trong vận hành
Giảm chi phí hoạt động
Với các lợi ích như trên và mục tiêu áp dụng những kiến thức đã tìm hiểu được
từ cơng nghệ xe tự hành, em đã lựa chọn đề tài: “Thiết kế, chế tạo robot tự hành
mini có kết nối trên điện thoại”.
2. Mục tiêu nghiên cứu của đề tài
Mục tiêu của đề tài chính là nghiên cứu và chế tạo mơ hình Robot vận chuyển
với nhiệm vụ của Robot là vận chuyển hàng giữa các vị trí khác nhau trong 1 khơng
gian.
3. Đối tượng nghiên cứu
Đối tượng: Mơ hình robot vận chuyển hàng hoá.
4. Phạm vi nghiên cứu
Phạm vi: Nghiên cứu về kỹ thuật thiết kế, xây dựng mô hình; tích hợp kỹ thuật
cùng vốn kiến thức đã học để thiết kế mơ hình với các tính năng thơng minh.
5. Phương pháp nghiên cứu
Phân tích, kế thừa lý thuyết.
Chế tạo mơ hình Robot tự hành mini vận chuyển hàng hóa AGV và thử
nghiệm.
i
6. Bố cục của đề tài
Đề tài bao gồm 4 chương:
Chương 1. Tổng quan về Robot AGV
Chương 2. Cơ sở lý thuyết
Chương 3. Thiết kế hệ thống điều khiển cho Robot AGV
Chương 4. Chế tạo và thử nghiệm
Hà Nội, ngày… tháng … năm……
Sinh viên thực hiện
ii
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
Họ và tên sinh viên: Đặng Khương Duy
Mã sinh viên: 1951081052
Lớp: 64 - CNCĐT
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
Kết luận: Đồng ý/Không đồng ý cho sinh viên…………nộp báo cáo khóa luận tốt
nghiệp.
Hà Nội, ngày……..tháng……năm……
GIÁO VIÊN HƯỚNG DẪN
(Chữ ký, Họ tên)
iii
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN
Họ và tên sinh viên: Đặng Khương Duy
Mã sinh viên: 1951081052
Lớp: 64 - CNCĐT
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
...............................................................................................................................................................
GIÁO VIÊN PHẢN BIỆN
(Chữ ký, Họ tên)
iv
MỤC LỤC
LỜI MỞ ĐẦU ......................................................................................................... i
MỤC LỤC ...............................................................................................................v
DANH MỤC CÁC KÝ HIỆU VÀ CHỮ VIẾT TẮT............................................ vi
1.1.
Lịch sử phát triển ..............................................................................1
1.2.
Cấu tạo cơ bản của Robot AGV .......................................................3
1.3.
Một số loại Robot tự hành vận chuyển hàng hóa .............................4
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT ........................................................................8
2.1.
Mơ hình động học của robot .............................................................8
2.1.1.
Khái niệm ..........................................................................................8
2.2.
Bộ điều khiển PID ..........................................................................10
CHƯƠNG 3. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN CHO ................................14
ROBOT AGV ........................................................................................................14
3.1.
Yêu cầu thiết kế của Robot AGV ...................................................14
3.2.
Nguyên lý hoạt động chung của Robot AGV .................................14
3.3.
Sơ đồ khối hệ thống của Robot AGV .............................................15
b)
Nguyên lý hoạt động cảm biến siêu âm HC-SR04: ........................21
3.4.
Nguyên lý hoạt động và lưu đồ thuật toán của hệ thống điều khiển 26
3.5.
Lập trình điều khiển cho Robot AGV ............................................28
CHƯƠNG 4. CHẾ TẠO VÀ THỬ NGHIỆM ......................................................32
4.1.
Thi công phần cứng ........................................................................32
4.4.
Thử nghiệm chức năng hệ thống ....................................................44
KẾT LUẬN ...........................................................................................................47
v
DANH MỤC CÁC KÝ HIỆU VÀ CHỮ VIẾT TẮT
STT
Kí hiệu
Chú thích
Đơn vị
1
q
Ma trận vị trí
2
𝜃
Rad
3
𝜃
4
𝜃𝜃 , 𝜃𝜃
Góc của robot so với
phương ngang
Vận tốc tuyến tính của
robot
Vận tốc bánh phải, trái
5
𝜃
Vận tốc góc của robot
Rad/s
6
R
Bán kính bánh xe
mm
7
L
mm
8
𝜃𝜃𝜃
9
𝜃𝜃
10
𝜃𝜃
Nửa khoảng cách giữa
2 bánh xe
Động năng tịnh tiến
của thân xe
Động năng quay của
bánh xe
Vận tốc dài của xe
11
𝜃𝜃𝜃 , 𝜃𝜃𝜃
m/s
12
𝜃𝜃𝜃 , 𝜃𝜃𝜃
Kg/𝜃2
m/s
m/s
J
J
m/s
13
𝜃𝜃
Vận tốc dài bánh phải,
trái
Momen quán tính của
từng bánh
Khối lượng bánh xe
14
𝜃𝜃
Khối lượng thân xe
Kg
15
𝜃𝜃𝜃
Momen động cơ
N.m
16
𝜃𝜃𝜃𝜃
N.m
17
u
18
19
𝜃𝜃𝜃𝜃
k
Momen hao tổn trên
trục
Hệ số tổn thất trên trục
động cơ
Momen ma sát lăn
20
Kg
N.m
g
Hệ số ma sát giữa bánh
xe và mặt đường
Gia tốc trọng trường
m/𝜃2
21
𝜃
Vận tốc góc của bánh
Rad/s
22
𝜃
Gia tốc góc của bánh
rad/𝜃2
23
a
Gia tốc dài
m/𝜃2
24
𝜃 𝜃, 𝜃 𝜃
m/s
25
t
Vận tốc tại điểm đầu
A, điểm cuối B
Thời gian xe di chuyển
26
𝜃𝜃𝜃
Công suất động cơ
W
vi
s
27
ξ
Ma trận vị trí robot
28
d
Đường kính trục vít me
mm
29
u
Bước của vít me
mm
30
𝜃1, 𝜃2
mm
31
𝜃1, 𝜃2
32
x
Đường kính bánh răng
1, 2
Số răng của bánh răng
1, 2
Số mắt xích
33
AGV
34
SDV
Automated Guided
Vehicle
Self Driving Vehicle
vii
CHƯƠNG 1. TỔNG QUAN VỀ ROBOT AGV
1.1.
Lịch sử phát triển
Khái niệm về Robot tự hành AVG là một khái niệm chung chỉ tất cả các hệ
thống có khả năng vận chuyển mà không cần người lái. Trong công nghiệp Robot tự
hành AGV được hiểu là các xe chuyên chở tự động được áp dụng trong các lĩnh vực:
Cung cấp, sắp xếp linh kiện tại khu vực kho và sản xuất.
Vận chuyển hàng giữa các trạm sản xuất.
Phân phối, cung ứng sản phẩm trong hệ thống kho hàng tự động của hệ thống
logictics.
Ứng dụng trong các lĩnh vực đặc biệt như bệnh viện, siêu thị, văn phòng.
Trong quá trình phát triển Robot tự hành AGV được chia ra thành các thời kì
và được phân biệt với nhau thơng qua trình độ cơng nghệ và sự phản hồi tương tác từ
môi trường làm việc đối với hệ thống. Đây cũng có thể được đánh giá là những giai
đoạn phát triển trong từng thời kỳ của khoa học, công nghệ của thế giới:
a) Thời kì đầu tiên của Robot tự hành AGV
Sáng chế đầu tiên về Robot tự hành AGV ứng dụng trong công nghiệp ở Mỹ
từ năm 1953, sau đó vài năm là ở những nước châu Âu. Khoa học công nghệ phát
triển, những Robot tự hành đầu tiên được tạo ra và được dẫn đường một cách đơn
giản bằng cách sử dụng những sensor thay cho các cơng tắc hành trình.
Hình 1.1: Robot tự hành AGV trong giai đoạn đầu
b) Thời kì thứ 2 - Bùng nổ của tự động hóa
Kỷ nguyên thứ hai phát triển trong 20 năm bắt đầu từ năm 1970 và kết thúc
vào đầu những năm 1990. Trong giai đoạn này các tương tác của Robot tự hành AGV
với môi trường làm việc đã bắt đầu được thực hiện và tích hợp với hệ thống sản xuất.
Khả năng ứng dụng của AGV tăng lên như: có khả năng đảo chiều, dỡ hàng, di chuyển
và dừng tại các vị trí định trước. Điều khiển, truyền tín hiệu bằng sóng vơ tuyến và
tín hiệu hồng ngoại, còn dẫn đường bằng day dẫn hướng hoặc vạch kẻ. Lĩnh vực được
ứng dụng phố biến nhiều nhất trong thời kỳ này là ngành cơng nghiệp sản xuất Ơ tô,
1
đặc biệt là các nhà máy sản xuất ô ở Đức, các Robot tự hành AGV đã trở thành một
thành phần quan trọng trong dây chuyền sản xuất ô tô như:
Trong lắp ráp ô tô, Robot tự hành AGV được ứng dụng như một trạm lắp ráp
di động.
Trong sản xuất linh kiện, Robot tự hành AGV là một mơ đun liên kết các
máy móc sản xuất theo một quy trình.
Các loại Robot tự hành AGV kéo, nâng dùng để cung cấp linh kiện trong dây
chuyền sản xuất.
Trong công tác kho vận Robot tự hành AGV được ứng dụng để vận hành và
phân phối sản phẩm.
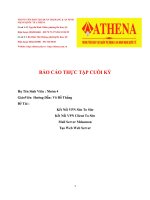
Hình 1.2: Robot tự hành AGV hoạt động trong nhà máy sản xuất Ơ tơ
c) Thời kì thứ 3- Cơng nghệ đã được chứng minh
Kỷ nguyên thứ ba kéo dài từ giữa những năm 1990 đến năm 2010, trong đó
các tiêu chuẩn công nghệ đã được thiết lập. Các Robot tự hành AGV đã được trang
bị các loại cảm biến không tiếp xúc và cơng nghệ nhận dạng hình ảnh và xử lý tín
hiệu bằng các bộ vi xử lý và truyền dữ liệu thông qua hệ thống mạng WLAN. Trong
giai đoạn này hệ thống dẫn đường bằng day và vạch kẻ khơng cịn vai trị. Ở thời kỳ
này Robot tự hành AGV có các tính năng vượt trội hơn ở thời kỳ thứ 2 như:
Tốc độ di chuyển cao hơn trong vận chuyển, vận tải nhờ cải tiến công nghệ
cảm biến.
Robot tự hành AGV có chi phí thấp hơn, nhưng hoạt động tin cậy hơn.
Tích kiệm niệm năng lượng và có khả năng tự nạp năng lượng.
Các Robot tự hành AGV đã được trang bị máy tính cơng nghiệp để xử lý,
kiểm sốt thiết bị và tương tác với môi trường làm việc bằng các cảm biến
thông minh.
Truyền dữ liệu chủ yếu qua WLAN.
d) Thời kì thứ 4 Bùng nổ và thách thức
Kỷ nguyên thứ 4 được bắt đầu từ năm 2010 đến nay, những thách thức về chức
năng được đặt ra:
2
Hoạt động an tồn, tin cậy, tích hợp.
Liên kết tự động và thơng minh hóa.
Có khả năng hoạt động theo bầy đàn và nhận dạng các Robot tự hành AGV
với nhau, cũng như với các thiết bị trong một dây chuyền sản xuất.
Ứng dụng trí tuệ nhân tạo và cơ sở dữ liệu lớn trong vận hành và quản lý hệ
thống.
Phát triển các ứng dụng khác trong các lĩnh vực của cuộc sống như: bệnh
viện, nông nghiệp v.v..
1.2.
Cấu tạo cơ bản của Robot AGV
Cấu tạo cơ bản của Robot tự hành AGV được mô tả trên hình 1.3 bao gồm các
bộ phận chính sau:
Hình 1.3: Các bộ phận chính của Robot AGV
Bộ truyền chuyển động: Có nhiệm vụ truyền động năng từ động cơ quan các
bộ giảm tốc đến bánh xe giúp AGV di chuyển một cách linh hoạt và đạt được
vận tốc cũng như lực kéo phù hợp, đáp ứng được yêu cầu cơng việc.
Bánh xe chủ động: Phải có độ bám đường tốt nhằm đảm bảo xe không bị
trượt trên đường di chuyển khi chịu tải lớn.
Bánh xe bị động (vô hướng): Giúp cho việc di chuyển linh hoạt hơn và chịu
tải chính, giúp AGV di chuyển linh hoạt trong các khúc cua hay quay đầu.
Hệ thống cảm biến: Giúp AGV nhận dạng đường đi, cũng như phát hiện
chướng ngại vật trên đường di chuyển của xe và tương tác với môi trường
làm việc.
Bộ nguồn nuôi: Ắc quy và pin để nuôi bộ điều khiển trung tâm và cơ cấu chấp
hành của AGV.
Bộ Driver điều khiển động cơ: Có nhiệm vụ thay đổi chiều quay và tốc độ của
động cơ dẫn động hệ thống.
3
1.3.
Một số loại Robot tự hành vận chuyển hàng hóa
Về cơ bản Robot tự hành AGV được phân loại theo chức năng và hệ thống
nhận dạng đường đi.
1.3.1. Phân loại theo chức năng
Khi phân loại theo chức năng thì Robot tự hành AGV lại được phân thành 4
loại như sau:
Xe kéo (Towing Vehicle)
Xe kéo xuất hiện đầu tiên và bây giờ vẫn được sử dụng rất phổ biến, loại này
có thể kéo được nhiều loại hàng khác nhau và chở được từ 8000-60000 pounds. Ưu
điểm của hệ thống xe kéo:
Khả năng chun chở lớn.
Có thể dự đốn và lên kế hoạch về tính hiệu quả của việc chun chở cũng như
đảm bảo an tồn.
Tăng tính an tồn.
Hình 1.4: AGV kéo hàng trong nhà máy
Xe chở (Unit LoadVehicle)
Hình 1.5: Xe chở AGV sử dụng hệ thống nâng, hạ
Xe chở được trang bị các tầng khay chứa có thể là nâng, hạ hay chuyển động
bằng băng tải, đai hoặc xích.
4
Hình 1.6: Xe AGV sử dụng hệ thống băng tải
Loại này có ưu điểm:
Tải trọng được phân phối và di chuyển theo yêu cầu.
Thời gian đáp ứng nhanh gọn.
Giảm hư hại sản phẩm.
Đường đi linh hoạt.
Giảm thiểu các tắc nghẽn giao thông chuyên chở.
Lập kế hoạch hiệu quả.
Xe đẩy (CartVehicle)
Xe đẩy có tính linh hoạt cao và giá thành thấp. Chúng được sử dụng để chuyên
chở vật liệu và các hệ thống lắp ráp.
Hình 1.7: Robot tự hành AGV trong một nhà máy sản xuất cơ khí
Xe nâng (ForkVehicle)
Có khả năng nâng các tải trọng đặt trên sàn hoặc trên các bục cao hay các khối
hàng đặt trên giá.
5
Hình 1.8: Xe nâng tự hành AGV
Ưu điểm: Vận chuyển hàng hóa với kích thước lớn, tải trọng lớn. Tuy nhiên,
xe cần khơng gian hoạt động rộng, kích thước xe lớn hơn các loại cịn lại.
Hình 1.9: Xe nâng AGV hoạt động trong nhà máy thời đại công nghệ 4.0
1.3.2. Phân loại theo dạng đường đi
Loại chạy không đi theo đường dẫn (Free pathnavigation)
Loại này có thể di chuyển đến các vị trí bất kỳ trong khơng gian hoạt động. Đây
là loại xe AGV có tính linh hoạt cao được định vị, vị trí nhờ các cảm biến con quay
hồi chuyển (Gyroscop sensor) để xác định hướng di chuyển, cảm biến laser để xác
định vị trí các vật thể xung quanh trong quá trình di chuyển, hệ thống định vị cục bộ
(Local navigation Location) để xác định tọa độ tức thời. Việc thiết kế loại xe này địi
hỏi cơng nghệ cao và phức tạp hơn so với các loại AGV khác.
Loại chạy theo đường dẫn (Fixed pathnavigation)
Hình 1.10: Xe AGV chạy theo đường dẫn trên nền
6
Xe AGV thuộc loại này được thiết kế để chạy theo các đường dẫn định sẵn
gồm các loại đường dẫn như sau:
Đường dẫn từ: Là loại đường dẫn có cấu tạo là dây từ (Magnetic wire) chôn
ngầm dưới nền sàn. Khi di chuyển, nhờ có các cảm biến cảm ứng từ mà xe có
thể di chuyển theo đường dây dẫn. Loại đường dẫn này không nằm bên trên
mặt sàn nên có mỹ quan tốt, khơng ảnh hưởng đến các công việc vận hành
khác cũng như di chuyển trong nhà xưởng. Tuy nhiên, khi sử dụng phải tiêu
tốn năng lượng cho việc tạo từ tính trong dây, đồng thời đường dẫn là cố định
và không thể thay đổi được. Khi thay đổi công nghệ hoặc phát triển sản xuất
phải cải tạo hoặc thay thế đường dẫn mới gây tốn kém và lãng phí tài nguyên.
Đường ray dẫn: Xe AGV được chạy trên các ray định trước trên mặt sàn. Loại
này chỉ sử dụng đối với những hệ thống chuyên dụng. Nó cho phép thiết kế xe
đơn giản hơn và có thể di chuyển với tốc độ cao nhưng tính linh hoạt thấp.
Đường quang kẻ trên sàn: Xe AGV di chuyển theo các đường băng kẻ sẵn trên
sàn nhờ các loại cảm biến quay nhận dạng vạch kẻ. Loại này có tính linh hoạt
cao vì trong q trình sử dụng người ta có thể thay đổi đường đi một cách dễ
dàng nhờ kẻ lại các vạch dẫn. Tuy nhiên khi sử dụng, các vạch dẫn có thể bị
bẩn hay hư hại gây khó khăn cho việc điều khiển chính xác xe và thường phải
làm mới vạch kẻ sau một thời gian sử dụng nhất định.
7
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
2.1.
Mơ hình động học của robot
2.1.1. Khái niệm
Động học là phạm vi chuyển động hoặc thay đổi mà một hệ thống có thể trải
qua, hoặc khơng gian trạng thái mà nó hoạt động.
Ví dụ: Động học của một vật cứng trong không gian mô tả các vị trí tọa độ và
hướng có thể có của nó cũng như phạm vi vận tốc và vận tốc góc,...
2.1.2. Tính tốn động học
Để bộ điều khiển bám theo một điểm mong muốn, hệ tọa độ của xe được xác
định như hình bên dưới. Chọn hệ trục tọa độ tuyệt đối là Oxy, hệ trục tọa độ tương đối
là Muv gắn với xe.
Hình 2.1: Hệ trục tọa độ cho phương trình của hệ thống
Với:
•
•
•
•
•
•
𝑣𝑙 , 𝑣𝑟 là vận tốc dài tức thời bánh trái và bánh phải.
d là khoảng cách trung điểm trục xe đến điểm bám line C.
a là khoảng cách trung điểm trục xe với tâm vận tốc tức thời I.
M là trung điểm của tâm 2 bánh xe.
𝜑 là hướng của xe tại điểm bám line C.
L là khoảng cách giữa 2 bánh chủ động.
Tọa độ tâm vận tốc tức thời I trên hệ tọa độ Oxy là:
𝑥 = 𝑥 − 𝑑 sin 𝜑
{ 1
𝑦1 = 𝑦 + 𝑑 cos 𝜑
(2-1)
Với bán kính quay tức thời là:
𝑎=
𝐿(𝑣𝑟 +𝑣𝑙 )
2(𝑣𝑟 −𝑣𝑙 )
=
𝐿(𝑤𝑟 +𝑤𝑙 )
2(𝑤𝑟 −𝑤𝑙 )
Phương trình động học của xe tại điểm M là:
𝑥̇ 𝑀
cos 𝜑
[ 𝑦̇ 𝑀 ] = [ sin 𝜑
𝜑̇ 𝑀
0
8
0
𝑣
0] [ 𝑤 ]
1
(2-2)
(2-3)
Phương trình động học của xe quy về điểm bám line C là:
𝑥̇ 𝑐
cos 𝜑 −𝑑 ∗ sin 𝜑
𝑣
[ 𝑦̇𝑐 ] = [ sin 𝜑 𝑑 ∗ cos 𝜑 ] [ ]
𝑤
𝜑̇ 𝑐
0
1
(2-4)
Trong đó: v,w là vận tốc dài, vận tốc góc của xe được tính như sau:
𝑣=
𝑣𝑟 +𝑣𝑙
𝜔=
𝑣𝑟 −𝑣𝑙
2
𝐿
=
(𝜑𝑟 +𝜑𝑙 )𝑟
=
(𝜑𝑟 −𝜑𝑙 )𝑟
𝑟
𝑣
≫ [ ] = [2𝑟
𝑤
𝐿
(2-5)
2
(2-6)
𝐿
𝑟
2
−
𝑤𝑟
]
[
𝑟 𝑤 ]
𝐿
(2-7)
𝑙
Với:
• r là bán kính bánh xe.
• wr, wl là tốc độ quay của bánh phải và bánh trái.
Phương trình động học của điểm tham chiếu R nằm trên đường line là:
𝑥̇ 𝑅
cos 𝜑𝑅 0 𝑣
𝑅
𝑦̇
[ 𝑅 ] = [ sin 𝜑𝑅 0] [𝑤 ]
𝑅
𝜑̇ 𝑅
0
1
Với 𝑣𝑅 , 𝑤𝑅 là vận tốc dài, vận tốc góc mong muốn thiết kế cho xe.
(2-8)
Bộ điều khiển được thiết kế để đưa điểm bám đường C đến vị trí mong muốn
R với vận tốc mong muốn 𝑣𝑅 . Để điều khiển được, ta cần xác định các sai số bám line
trong hệ tọa độ Muv như sau:
𝑥𝑒
cos 𝜑 sin 𝜑 0 𝑥𝑅 − 𝑥𝐶
[ 𝑦𝑒 ] = [−sin 𝜑 cos 𝜑 0] [ 𝑦𝑅 − 𝑦𝐶 ]
(2-9)
𝜑𝑒
𝜑
−
𝜑
𝑅
𝐶
0
0
1
𝑥𝑒 = (𝑥𝑅 − 𝑥𝐶 ) cos 𝜑 + (𝑦𝑅 − 𝑦𝐶 ) sin 𝜑
≫ {𝑦𝑒 = (𝑥𝑅 − 𝑥𝐶 ) (−sin 𝜑) + (𝑦𝑅 − 𝑦𝐶 ) cos 𝜑
𝜑𝑒 = (𝜑𝑅 − 𝜑𝐶 )
(2-10)
Sau khi có giá trị sai số vị trí, ta đạo hàm chúng để có được sai số về vận tốc
như sau:
𝑣𝑅 cos 𝜑𝑒
𝑥̇ 𝑒
−1
𝑦𝑒
𝑣
𝑣
sin
𝜑
[ 𝑦̇𝑒 ] = [ 𝑅
(2-11)
𝑒] + [ 0
−𝑑 − 𝑥𝑒 ] [𝑤]
𝑤𝑅
𝜑̇ 𝑒
0
−1
Thay (2-7) vào (3-11) ta được sai số về vận tốc:
𝑟
− +
𝑦𝑒 𝑟
2
𝐿
𝑣𝑅 cos 𝜑𝑒
𝑥̇ 𝑒
(𝑑+𝑥𝑒 )𝑟
[ 𝑦̇𝑒 ] = [ 𝑣𝑅 sin 𝜑𝑒 ] + − 𝐿
𝑤𝑅
𝜑̇ 𝑒
𝑟2
−
[
𝐿2
𝑟
− −
𝑦𝑒 𝑟
2
𝐿
(𝑑+𝑥𝑒 )𝑟
𝐿
𝑟2
𝐿2
𝑤𝑟
[𝑤 ]
𝑙
(2-12)
]
Mục đích của giải thuật điều khiển là làm cho điểm C bám theo điểm tham
9
chiếu R. Để làm điều này ta phải xác định các sai số xe,ye, 𝜃𝑒 . Trên thức tế, vận tốc
thực của xe xấp xỉ với vận tốc mong muốn nên sai số xe=0, sai số ye được đo từ cảm
biến và ta cần tính tốn sai số 𝜃𝑒 . Để tính sai số này ta cho xe di chuyển theo phương
trước đó của xe một đoạn ds sao cho ds đủ nhỏ để khi nối hai điểm 𝑅𝑅′ ta được tiếp
tuyến đường cong. Khi đó, ta có cơng thức xác định 𝜃𝑒 :
𝜃𝑒 = 𝑎𝑟𝑐𝑡𝑎𝑛 (
𝑦𝑒 −𝑦𝑒′
𝑑𝑠
) = 𝑎𝑟𝑐𝑡𝑎𝑛 (
∆𝑦𝑒
𝑑𝑠
)
(2-13)
Hình 2.2: Xe di chuyển đoạn ds trong thời gian lấy mẫu
2.2. Bộ điều khiển PID
2.2.1. Khái niệm
PID là một bộ điều khiển sử dụng cơ chế phản hồi feedback trong hệ thống
cơng nghiệp. PID sẽ tính tốn các giá trị “ sai số” là hiệu số đo được của thiết bị trên
thực tế và giá trị mà mình mong muốn (Setpoint). Giải thuật tính tốn của PID bao
gồm 3 thông số riêng biệt, gọi là điều khiển 3 khâu: các giá trị tỉ lệ ( Proportional),
tích phân ( Integral), đạo hàm ( Derivative), giá trị tỉ lệ xác định của sai số hiện tại,
giá trị tích phân xác định tác động của các sai số quá khứ và vi phân xác định tác
động của tốc độ biến đổi sai số. Nhờ vậy mà ta có mối quan hệ: P phụ thuộc vào sai
số hiện tại, I phụ thuộc vào tích lũy sai số trong quá khứ và D dự đoán các sai số trong
tương lai, dựa vào tốc độ thay đổi của hiện tại.
Sơ đồ điều khiển PID được đặt tên theo ba khâu hiệu chỉnh của nó, tổng của
ba khâu này tạo thành bởi các biến điều khiển (MV). Ta có:
MV(t)=Pout + Iout + Dout
Trong đó: Pout + Iout + Dout là các thành phần đầu ra từ ba khâu của bộ điều
khiển PID, được xác định như bên dưới.
Hình 2.3: Bộ điều khiển PID
10
a) Khâu tỉ lệ ( Proportional)
Khâu tỉ lệ (đôi khi còn được gọi là độ lợi) làm thay đổi giá trị đầu ra, tỉ lệ với
giá trị sai số hiện tại. Đáp ứng tỉ lệ có thể được điều chỉnh bằng cách nhân sai số đó
với một hằng số Kp, được gọi là hệ số tỉ lệ. Khâu tỉ lệ được cho bởi:
𝑃𝑜𝑢𝑡 = 𝐾𝑝 𝑒(𝑡)
Trong đó :
𝑃𝑜𝑢𝑡 : tỉ lệ đầu ra
𝐾𝑝 : là độ lợi tỉ lệ, thông số điều chỉnh
𝑒 : sai số .
𝑡: thời gian tức thời.
b) Khâu tích phân ( Integral)
Phân phối của khâu tích phân (đơi khi cịn gọi là reset) tỉ lệ thuận với cả biên
độ sai số lẫn quảng thời gian xảy ra sai số. Tổng sai số tức thời theo thời gian (tích
phân sai số) cho ta tích lũy bù đã được hiệu chỉnh trước đó. Tích lũy sai số sau đó
được nhân với độ lợi tích phân và cộng với tín hiệu đầu ra của bộ điều khiển. Biên độ
phân phối của khâu tích phân trên tất cả tác động điều chỉnh được xác định bởi độ lợi
tích phân, 𝐾𝑖 . Thừa số tích phân được cho bởi:
𝑡
𝐼𝑜𝑢𝑡
= 𝐾𝑖 . ∫ 𝑒(𝑟)𝑑𝑟
0
Trong đó:
𝐼𝑜𝑢𝑡 : thừa số tích phân của đầu ra
𝐾𝑖 : độ lợi tích phân, 1 thơng số điều chỉnh
𝑒: sai số
𝑡: thời gian tức thời
𝑟: một biến trung gian
c) Khâu vi phân ( Derivational)
Tốc độ thay đổi của sai số q trình được tính tốn bằng cách xác định độ dốc
của sai số theo thời gian (tức là đạo hàm bậc một theo thời gian) và nhân tốc độ này
với độ lợi tỉ lệ 𝐾𝑑 . Biên độ của phân phối khâu vi phân (đôi khi được gọi là tốc độ)
trên tất cả các hành vi điều khiển được giới hạn bởi độ lợi vi phân, 𝐾𝑑 . Thừa số vi
phân được cho bởi:
𝑑
𝐷𝑜𝑢𝑡 = 𝐾𝑑 . 𝑒(𝑡)
𝑑𝑡
Trong đó:
𝐷𝑜𝑢𝑡 : thừa số vi phân đầu ra
𝐾𝑑 : Độ lợi vi phân, một thông số điều chỉnh
𝑒: sai số
𝑡: thời gian tức thời
d) Tóm lại
Khâu tỉ lệ, tích phân, vi phân được cộng lại với nhau để tính tốn đầu ra của
bộ điều khiển PID. Định nghĩa rằng u(t) là đầu ra của bộ điều khiển, biểu thức cuối
11
cùng của giải thuật PID là:
𝑡
𝑢(𝑡 ) = 𝑀𝑉 (𝑡 ) = 𝐾𝑝 𝑒(𝑡 ) + 𝐾𝑖 ∫ 𝑒(𝑟)𝑑𝑟 + 𝐾𝑑
0
•
•
•
𝑑
𝑒(𝑡)
𝑑𝑡
Độ lợi tỉ lệ, Giá trị càng lớn thì đáp ứng càng nhanh do đó sai số càng lớn, bù
khâu tỉ lệ càng lớn. Một giá trị độ lợi tỉ lệ quá lớn sẽ dẫn đến quá trình mất ổn
định và dao động.
Độ lợi tích phân, Giá trị càng lớn kéo theo sai số ổn định bị khử càng nhanh.
Đổi lại là độ vọt lố càng lớn: bất kỳ sai số âm nào được tích phân trong suốt
đáp ứng quá độ phải được triệt tiêu tích phân bằng sai số dương trước khi tiến
tới trạng thái ổn định.
Độ lợi vi phân, Giá trị càng lớn càng giảm độ vọt lố, nhưng lại làm chậm đáp
ứng quá độ và có thể dẫn đến mất ổn định do khuếch đại nhiễu tín hiệu trong
phép vi phân sai số.
2.2.2. Sơ đồ khối ứng dụng bộ điều khiển PID vào Robot AGV
Để khi chạy robot bám sát đường nhất, ta cần xây dựng 1 bộ PID phù hợp. Vị
trí robot bám sát đường nhất ở đây là giá trị mục tiêu, bộ PID sẽ tính tốn giá trị sai
lệch là hiệu số đo được từ cảm biến dò đường đi vạch sẵn và giá trị mục tiêu. Đầu ra
của bộ PID dùng để điều khiển mạch driver điều khiển tốc độ 2 động cơ để cho robot
bám đường nhất. Từ đó ta xây dựng được sơ đồ khối như hình 2.4.
Hình 2.4: Sơ đồ khối điều khiển PID cho robot AGV
Các bước thực hiện chương trình PID như sau:
P=error
I=I + previous_I
D= error - previous_error
PID_value= (Kp * P) + (Ki * I) + (Kd * D)
previous_I=error
previous_error = error
Trong đó:
P là sai số hiện tại.
I là sai số trong quá khứ.
12
D là sai số tương lai.
Error là sai số.
previous_I là sai số trong quá khứ trước đó.
previous_error là sai số trước đó.
13
CHƯƠNG 3. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN CHO
ROBOT AGV
3.1.
Yêu cầu thiết kế của Robot AGV
Yêu cầu thiết kế của Robot AGV được đặt ra là:
Một mơ hình Robot tự hành mini phải đảm bảo các chức năng cơ bản của một
robot vận chuyển hàng hoá bao gồm: Di chuyển tự động, Di chuyển thủ công,
đến điểm nhận và trả hàng, dừng khi gặp vật cản, hiển thị thông tin lên màn
hình.
Chi phí cấu thành thấp
Hoạt động ổn định
Dễ dàng sử dụng
3.2.
Nguyên lý hoạt động chung của Robot AGV
Khởi động robot bằng cách bấm nút Switch khởi động robot. Sau đó nhấn nút
nhấn màu xanh để chọn nền tảng điều khiển:Web hoặc App.
Hình 3.1: Chú thích phần cứng
Hai nền tảng đều có cách thức điều khiển giống nhau. Trường hợp ta dùng nền
tảng web để điều khiển. Để vào nền tảng web, trước tiên ta phải vào 1 trình duyệt
web bất kì trên thiết bị như google chrome.
Ở thiết bị ta kết nối đến điểm wifi của robot (username: Robot AGV, khơng
có password) như hình 3.2.
14
Hình 3.2: Kết nối đến điểm wifi của robot
Sau đó ở trình duyệt web ta truy cập đến địa chỉ IP được hiển thị trên màn hình
robot để vào giao diện điều khiển của nền tảng web.
Hình 3.3: Truy cập vào nền tảng điều khiển web
Sau khi đã vào được giao diện điều khiển trên nền tảng web ta cần reset lại tất
cả các thông số về ban đầu bằng cách nhấn nút RESET ALL. Tiếp đến phải cài đặt
số trạm(điểm đến) và hướng các trạm bằng cách chuyển sang Tab Cài đặt trạm, cài
đặt như mong muốn sau đó nhấn nút Thiết lập. Tiếp đến chọn mode điều khiển cho
robot, robot có 2 mode điều khiển là thủ cơng hoặc tự động. Lưu ý: để Robot chạy
đúng trong mode tự động ta cần phải hiệu chỉnh line bằng cách chuyển sang Tab Điều
khiển nhấn nút Hiệu chỉnh Line. Ở mode điều khiển tự động cần nhập điểm đến. Sau
đó nhấn nút Go để robot di chuyển. Sau khi đến đúng điểm robot sẽ dừng lại, lúc này
còi kêu lên và đèn cảnh báo tắt.
3.3.
Sơ đồ khối hệ thống của Robot AGV
Hệ thống bao gồm 6 khối chính: Khối nguồn, khối driver và động cơ, khối
15
cảm biến, khối giao tiếp, khối xử lý trung tâm, khối hiển thị và cảnh báo. Khối nguồn
sẽ cung cấp nguồn cho cả hệ thống, khối xử lý trung tâm sẽ nhận dữ liệu từ khối giao
tiếp và khối cảm biến từ đó hiển thị và điều khiển khối động cơ (Hình 3.4).
Module ESP32
Khối hiển thị
Khối xử lý trung
tâm
Khối cảm biến
5V
Khối driver
Động cơ
12V
Khối nguồn
Hình 3.4: Sơ đồ khối hệ thống của Robot AGV
Từ sơ đồ khối của hệ thống bên trên ta thấy được khối nguồn cấp điện áp 12V
cho module driver L298N để cấp nguồn cho động cơ. Trên module L289N có 1 bộ
hạ áp 5V ta dùng ln để cấp nguồn cho Arduino Uno, ESP32, màn hình LCD, cảm
biến phát hiện vật cản. Các module còn lại như: cảm biến dò line, còi, led cảnh báo
ta cấp nguồn từ Arduino Uno. Sơ đồ đấu nối các chân tín hiệu của các module điều
khiển như hình 3.5.
Hình 3.5: Sơ đồ đấu dây các module điều khiển
Chi tiết đấu nối giữa các chân của các module ngoại vi với module điều khiển
có trong sơ đồ nguyên lý của hệ thống ở Phụ lục 1.
16
3.3.1. Khối nguồn
u cầu:
• Điện áp đầu ra 12V
• Dịng xả cao
• Dung lượng pin vừa đủ
• Có mạch bảo vệ sạc xả
• Có khả năng xạc pin
• Gọn nhẹ
• Giá thành rẻ
Từ các yêu cầu trên ta lựa chọn pin Lithium 3S 12,6V làm khối nguồn cho
Robot AGV (hình 3.6).
Hình 3.6: Hình ảnh pin lithium 3S 12V
Thơng số kỹ thuật: Điện áp ra: 12,6V; Dung lượng: 2,6Ah; Dòng xả liên tục 25A.
3.3.2. Khối Driver và Động cơ
1. Động cơ
Đối với cơ cấu di chuyển của xe, lực cản tĩnh phụ thuộc vào khối lượng chuyên
chở và khối lượng của xe, trạng thái đường đi (cong, thẳng, ổ gà, dốc…). Do vậy lực
cản được tính theo cơng thức sau:
(𝐺 + 𝐺𝑥 )𝑔
(𝑟𝑐𝑡 + 𝑓) [𝑁]
𝐹=
𝑅𝑏
Trong đó:
G là khối lượng chuyên chở (khối lượng hàng tối đa), Kg
Gx là khối lượng của xe, Kg
g là gia tốc trọng trường, m/s2
Rb là bán kính bánh xe, m
rct là bán kính cổ trục của bánh xe, m
f là hệ số ma sát lăn
Momen của động cơ sinh ra để thắng lực cản chuyển động đó bằng:
𝑀 = 𝐹. 𝑅𝑏 [𝑁𝑚]
Trong đó:
17