Chuong 4. Các phương trình chuyển động của tên lửa
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (942.89 KB, 43 trang )
CHƯƠNG 4
CÁC PHƯƠNG TRÌNH CHUYỂN ĐỘNG CỦA TÊN LỬA
1. Các định lý cơ bản động lực học hệ khối lượng thành phần thay đổi
Chuyến bay của KCB phản lực được thực hiện dưới tác động của lực đẩy động cơ
phản lực. Trong quá trình làm việc của động cơ thành phần KCB không ngừng thay
đổi: sản phẩm cháy thải ra ngồi, ngồi ra động cơ phản lực khơng khí đưa vào các
hạt khơng khí hồn tồn mới.
Khi xem xét chuyển động của KCB, để thuận tiện ở từng thời điểm thành phần
của nó chỉ bao gồm các hạt vật chất mà trong thời điểm đó nó nằm bên trong thể tích
xác định mà KCB chiếm chỗ.
Trong bài tốn đặt ra như vậy KCB phản lực với động cơ làm việc là hệ thống có
thành phần thay đổi, khơng nên ứng dụng trực tiếp các định lý động lực học vật rắn
cho nó.
1.1. Các mối quan hệ động hình học
Trong mơi trường liên tục tạo nên từ các hạt ở thể khác nhau (thể rắn, thể lỏng và
thể khí) ta xem xét bề mặt khép kín S. Giả sử các hạt của môi trường chuyển động
tương đối so với hệ trục toạ độ nào đó 0xyz cịn bề mặt S dịch chuyển tương đối với
0xyz và bị biến dạng (hình 2.1).
Tập hợp các hạt vật chất của môi trường đã
cho giới hạn trong bề mặt S là hệ thống thành
phần thay đổi, như vậy với dòng thời gian một số
hạt nào đó của mơi trường đi xun qua bề mặt S.
Ta ký hiệu hệ này là Σ. Động lượng của hệ Σ và
mơ men chính động lượng của hệ này tương đối
so với điểm 0 ta ký hiệu tương ứng là Q, K .
Để có thể ứng dụng các định lý kinh điển động
lực học ta xét hệ thống thành phần không đổi Σ *
tạo nên từ các hạt vật chất mà trong thời điểm cố
định nào đó t nằm trong bề mặt S. Động lượng và mơ men chính động lượng của hệ
*
*
Σ* ký hiệu là Q , K .
Tại thời điểm t hệ Σ và hệ Σ* trùng nhau, ở những thời điểm tiếp theo một số từ
các hạt của hệ Σ* sẽ nằm ngồi thể tích giới hạn bề mặt S.
Trên hình 4.1 vị trí của bề mặt S được thể hiện bởi liền giới hạn các hạt của hệ Σ
và hệ Σ* ở thời điểm t, đường chấm gạch là vị trí bề mặt giới hạn các hạt của hệ Σ ở
thời điểm t1, đường đứt là vị trí bề mặt giới hạn các hạt của hệ Σ* ở thời điểm t1.
Rõ ràng tại thời điểm t:
*
*
(4.1)
Q Q, K K .
Nhưng trong đó:
1
dQ dQ* d K d K *
,
.
dt
dt
dt
dt
Để tìm mối lien hệ giữa các đạo hàm này ta xét hệ Σ và hệ Σ * ở thời điểm t1 = t +
Δt.t.
Giả sử QU là động lượng ở thời điểm t1 của các hạt đi vào thể tích giới hạn bởi bề
mặt S sau khoảng thời gian Δt.t, còn QV tương ứng với các hạt đi ra từ thể tích này. Ta
*
ký hiệu Q1 và Q1 là động lượng của các hệ Σ và Σ * ở thời điểm t1. Không khó nhận
thấy:
*
(4.2)
Q1 Q1 QV QU .
Tương tự ta có:
*
(4.2a)
K 1 K 1 K V K U .
Tính đẳng thức (2.1) từ (2.2) và (2.2a) sau đó chia cho Δt.t tìm giới hạn khi Δt.t → 0
ta nhận được:
*
*
dQ dQ
dK
dK
(4.3)
q;
k.
dt
dt
dt
dt
Trong đó q và k lưu lượng của động lượng và mô men động lượng qua bề mặt S
trong thời điểm t:
Q QU
KV KU
q lim V
; k lim
.
t 0
t 0
t
t
Các mối quan hệ (2.3) có tính chất động hình học và vì vậy đúng cho các hệ toạ
độ quán tính cũng như khơng qn tính và cũng cho mọi bề mặt chuyển động và biến
dạng S.
Giả sử bề mặt khép kín S giới hạn hệ có thành phần thay đổi Σ là khơng biến
dạng. Ta gọi bề mặt đó là vỏ cứng của hệ Σ. Trong trường hợp tên lửa vỏ cứng là bề
mặt đi qua bề mặt tên lửa và mặt cắt thoát miệng phun.
Ta đưa vào hệ trục toạ độ 0x 1y1z1 không thay đổi quan hệ với vỏ cứng S. Hệ trục
này nhìn chung khơng là hệ qn tính, vì vậy chuyển động cùng vỏ cứng bằng cách
tuỳ ý tương đối so với hệ trục toạ độ quán tính 0xyz.
Ta xác định sự thay đổi động lượng và mô men động lượng của hệ trục tương đối
0x1y1z1. Chỉ số “r” ký hiệu tất cả các đại lượng trong chuyển động tương đối, ký hiệu
đạo hàm tương đối qua / dt . Khi đó quan hệ (4.3) có dạng:
*
*
Q r
Q
K
K r
(4.4)
r qr , r
kr.
dt
dt
dt
dt
Trong đó: q r , k r - lưu lượng tương đối trong 1 giây của động lượng và mô men
động lượng qua bề mặt S trong thời điểm t.
Cho ví dụ tính q r , ta xét phân tố dS của bề mặt S tại thời điểm t. Giả sử v r - vận
tốc tương đối của các hạt môi trường (tức là vận tốc so với các trục 0x 1y1z1) ở thời
điểm đó; vn - thành phần pháp tuyến của vận tốc này (hướng từ ngoài vào bề mặt S là
2
dương); ρvvndS – lưu lượng giây của khối lượng qua phân tố dS. Khi đó lưu lượng
giây tương đối phân tố của động lượng sẽ bằng vn v r dS . Tổng hình học tất cả các
lưu lượng thành tố sẽ là:
q r vn v r dS .
(4.5)
dm
khối lượng giây của khí qua tiết diện ra miệng phun tên lửa;
dt
a vận tốc trung bình dịng chảy các hạt khí so với thành tên lửa khi đó:
q r mсек a .
1.2. Định lý về động lượng
Định lý về sự biến thiên động lượng là đạo hàm theo thời gian từ động lượng của
hệ thống bằng véc tơ chính của các ngoại lực có thể chỉ áp dụng cho hệ có khối
lượng khơng đổi Σ*.
Giả sử F - véc tơ chính của các ngoại lực tác dụng lên hệ có thành phần thay đổi
Σ ở thời điểm t và tiếp đó lên hệ Σ*.
Khi đó tại thời điểm cố định đang xét t:
Giả sử mсек
*
dQ
(4.6)
F .
dt
Ta cần liên hệ đẳng thức (4.4) với phương trình (4.6). Cho điều đó ta giả thiết
chuyển động của mỗi hạt của hệ thống Σ * là phức tạp. Giả sử chuyển động của hạt so
với vỏ S và các trục 0x1y1z1 là tương đối. Khi đó chuyển động theo của hạt sẽ là
chuyển động của nó cùng với vỏ S và các trục 0x 1y1z1 so với hệ toạ độ quán tính
0xyz.
Vận tốc tuyệt đối, theo và tương đối của hạt được ký hiệu là vi , vie , vir ; còn các gia
tốc tương ứng là a i , aie , air . Gia tốc Coriolit của hạt ký hiệu là a ik .
Rõ ràng là:
*
dQ
d
d vi
mi vi mi
mi a i .
dt
dt
dt
Theo định lý hợp gia tốc:
a i a ir a ie aik .
(4.7)
*
Vì vậy:
dQ
mi air mi a ie mi a ik .
dt
(4.8)
Ta nhớ rằng:
vir
.
dt
Suy ra véc tơ mi a ir là đạo hàm động lượng của hệ Σ* trong chuyển động tương
đối:
a ir
*
vir
Q
mi air mi dt dt mi vir dt r .
3
(4.9)
Véc tơ: F k mi a ik .
(4.10)
là véc tơ chính của các lực Coriolit quán tính.
Như vậy môi trường Σ không ngừng thay đổi thành phần của nó, có thể chỉ nói về
chuyển động của vỏ cứng S so với các trục 0xyz, tức là chuyển động theo của môi
trường Σ. Ở thời điểm t hệ Σ và hệ Σ* trùng nhau và có cùng giá trị véc tơ mi a ie .
Bằng cách đó chuyển động theo của môi trường Σ ở thời điểm t được biểu diễn
bằng phương trình mà nó nhận được từ phương trình (4.6) khi sử dụng (4.8), (4.9),
(4.10) và quan hệ động hình học (4.4):
Q
(4.11)
mi aie F ( q r ) F k ( dt r ).
Toàn bộ các số hạng phần bên phải của phương trình này có số đo lực. Véc tơ
( q r ) có thể xem như véc tơ chính phản lực kéo theo động lượng môi trường qua bề
Q r
mặt S. Các lực mà véc tơ chính của nó bằng (
) có thể gọi là biến phân. Các lực
dt
này xuất hiện kéo theo sự không ổn định của chuyển động tương đối của môi trường
và làm thay đổi (biến phân) động lượng so với các trục 0x 1y1z1. Nếu chuyển động
tương đối của môi trường là ổn lập, tức là tại mỗi điểm cố định so với các trục
0x1y1z1 mật độ môi trường, vận tốc của các hạt v ir không thay đổi theo thời gian thì
các lực biến phân bằng 0.
Phần trái của phương trình (4.11) có thể chuyển đến dạng thông thường. Đôi khi
không thể biểu diễn đẳng thức ở dạng giải tích (4.7) vì giữa các vận tốc theo và các
gia tốc có mối quan hệ sau:
d vie
a ie v ir .
dt
Trong đó - vận tốc góc quay của hệ 0x1y1z1.
Vì vậy ta đưa vào các vận tốc lý tưởng với sự giúp đỡ của biểu thức:
d vis
a ie .
dt
Khi đó:
d
dQ
(4.12)
mi aie dt mi vis dt s .
Động lượng giả tưởng Q s mi v is có thể thể hiện bằng cách sau. Động lượng
này có thể nhận được nếu ở thời điểm t hệ có thành phần thay đổi đơng cứng, tức là
mất đi chuyển động của các hạt so với vỏ bọc cứng ( v ir 0 ). Khi đó các gia tốc theo
của các hạt của hệ Σ sẽ bằng gia tốc tuyệt đối của các hạt nhận được bằng cách đó
của vật rắn giả tưởng. Ta ký hiệu vật rắn giả tưởng này qua S. Khi thay đổi thời điểm
đông cứng t, ta nhận được các vật rắn khác nhau S mà nó được giới hạn chỉ một vỏ
cứng S và chỉ khác nhau giá trị khối lượng của nó và sự phân bố nó trong vỏ. Các vật
S khác nhau có thể xem như một vật rắn có thành phần thay đổi giả định, trong nó
4
theo thời gian xuất hiện hoặc mất đi các hạt vật chất mà nó khơng chuyển động so
với vỏ cứng của vật. Rõ rang chuyển động của vật rắn giả định S trùng với chuyển
động của vỏ cứng thực S.
Đạo hàm theo thời gian của động lượng vật S ta nhận được trên cơ sở (4.11) và
(4.12) có cơng thức sau:
dQ s
Q r
F ( q r ) F k (
).
(4.13)
dt
dt
Phương trình này là biểu thức của định lý về sự biến thiên động lượng của hệ có
thành phần thay đổi. Nó chứng tỏ rằng để xác định chuyển động của vật S và suy ra
vỏ cứng S cho số ngoại lực cần đưa ra các ngoại lực F tác dụng lên hệ Σ, các phản
Q r
lực q r , các lực Coriolit F k và các lực biến phân
.
dt
1.3. Định lý về mô men động lượng
Kết quả phân tích đưa ra ở mục 1.2 có thể nhận được cho định lý về biến thiên của
mơ men chính động lượng của hệ thành phần thay đổi.
Ta xét vật rắn S nhận được nếu khi làm đông cứng hệ thống thành phần thay đổi
trong thời điểm t nào đó. Vật rắn S khơng thay đổi quan hệ với vỏ S và bắt đầu từ
thời điểm t chuyển động cùng với nó. Lấy trọng tâm của vật rắn S tại gốc hệ toạ độ
0x1y1z1 (trọng tâm hệ Σ và vật S trùng nhau).
Ta đưa vào các ký hiệu sau cho các mô men lấy với điểm 0:
K s - mơ men chính động lượng của vật S khi chuyển động tương đối của các trục
qua trọng tâm 0 và chuyển động tịnh tiến.
M - mô men chính của tất cả các ngoại lực tác dụng lên hệ Σ ở thời điểm t.
k r - mô men chính của các phản lực.
M k - mơ men chính của các lực Coriolit
K r
- mơ men chính của các lực biến phân.
dt
Với lập luận tương tự như ở phần trước ta nhận được công thức sự biến thiên mô
men động lượng tại thời điểm t:
dKs
K r
M ( k r ) M k (
).
(4.14)
dt
dt
Phương trình này biểu diễn chuyển động quay của vỏ cứng S quanh trọng tâm 0
của hệ thống có thành phần thay đổi Σ.
1.4. Nguyên tắc làm đông cứng
Các định lý suy rộng về sự biến thiên động lượng và mơ men chính động lượng
lượng của hệ thành phần thay đổi có thể hình thành nguyên tắc sau.
Các phương trình chuyển động của vỏ cứng hệ thành phần thay đổi Σ tại thời
điểm t bất kỳ có thể biểu diễn dưới dạng của các phương trình chuyển động của vật rắn
có thành phần không đổi nếu cho rằng ở thời điểm này hệ thay đổi Σ đông cứng và cho
5
vật rắn giả định nhận được bằng cách đó được đặt vào: 1) các ngoại lực tác dụng lên hệ
Σ; 2) các phản lực; 3) các lực Coriolit và 4) các lực biến phân.
2. Lực đẩy của động cơ phản lực
Nguyên tắc làm đông cứng chúng ta ứng dụng cho KCB phản lực, suy cho cùng là
trường hợp riêng của hệ thống thành phần thay đổi với vỏ cứng.
Để xác định lực đẩy của động cơ phản lực sử dụng phương trình (4.13) biểu diễn
chuyển động vỏ cứng của hệ thành phần thay đổi khi ngoại lực, phản lực và các lực
khác cho trước. Đôi khi ta sẽ giải bài toán khác nhau: khi giả thiết chuyển động của vỏ
cứng bằng những điều đã biết và các ngoại lực ta xác định các phản lực.
Để đơn giản bài toán ta xét chuyển động tịnh tiến đều của KCB theo đường
thẳng
nằm ngang. Giả sử KCB đối xứng qua trục dọc 0x 1 và hướng vận tốc bay V trùng với
trục này. lời giải của bài toán thực sự đơn giản nếu sử dụng ngun tắc nghịch đảo
chuyển động.
Giả sử dịng khơng khí chảy bao KCB đứng yên với tốc độ bằng tốc độ bay theo
hướng ngược lại. Các lực tác dụng tượng hổ giữa KCB và mơi trường khơng khí
(trường hợp các phản lực xuất hiện do các luồng khí phụt về phía sau) trong sự nghịch
đảo chuyển động này khơng đổi, nó chỉ phụ thuộc vào chuyển động tương đối của
KCB và khơng khí.
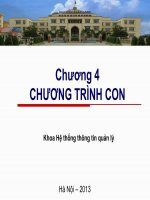
Chứng tỏ rằng vỏ cứng giới hạn hệ thành phần thay đổi có thể chọn thơng qua bề
mặt KCB, tiết diện vào của ống khuếch tán và tiết diện ra của ống phun. Đôi khi trong
trường hợp như vậy vận tốc các hạt và trạng thái (áp suất, mật độ) của mơi trường
khơng khí khơng biết ở mặt cắt cửa vào của ống khuếch tán.
Có thể ra khỏi tình
trạng khó khăn này nếu đưa
vào hệ thống thành phần
thay đổi đang xem xét tia khí
chảy vào ống khuếch tán.
Khi đó vỏ cứng sẽ là bề mặt
tia khí vạch ra, bề mặt của
máy phản lực, mặt phẳng tiết
diện ra miêng phun aa’ và
mặt phẳng mặt cắt 00’ của tia khí (hình 4.2). Mặt cắt 00 ’ ta đưa vào cách xa KCB mà ở
đó vận tốc cục bộ của các hạt, áp suất, mật độ của môi trường không khí bằng giá trị
của nó khi dịng khơng bị nhiễu loạn (V, p∞, ρv∞).
Ta áp dụng phương trình (4.13) cho hệ thành phần thay đổi giới hạn bởi vỏ cứng
đã cho. Vì vỏ cứng khơng chuyển động nên Q s 0; F k 0. Khi đó:
Q
F q r r .
(4.15)
dt
……
6
Các ngoại lực là:
- Lực trọng lượng (trọng lực).
- Phản lực ổ đỡ mà trên đó máy móc cố định.
- Các lực áp suất và ma sát trên toàn bộ bề mặt ngồi vỏ cứng.
Trọng lực có thể loại trừ khơng xét vì tiếp theo phương trình (4.15) sẽ được thể
hiện theo trục nằm ngang của hệ toạ độ 0x1.
Ta xem xét máy phản lực đứng yên và không quên máy cố định trên ổ đỡ. Giả sử
máy bay tác dụng lên ổ đỡ với lực R эфф . Khi đó ổ đỡ tác dụng lên máy bay là R эфф .
Giả sử p – áp suất bề mặt ngoài vỏ. Ta thể hiện áp suất này ở dạng tổng của áp
suất dịng khơng nhiễu động và áp suất dư trong chuyển động tương đối của KCB và
khơng khí:
p p p.
Tác dụng cân bằng của các lực áp suất khí quyển lên bề mặt a 1 0 0 ’ 1’ a’ có “lỗ” ở
tiết diện aa’ bằng p∞ Sa, trong đó Sa diện tích tiết diện thốt miệng phun. Lực này hướng
về phía “lỗ”.
Ở tiết diện cửa thốt miệng phun tác dụng lên bề mặt ngồi cua vỏ cứng một lực
paSa, trong đó pa – áp suất trung bình của khí ở tiết diện này.
Suy ra tác động cân bằng của các lực áp suất khí quyển và áp suất khí ở tiết diện
thốt miệng phun là:
F* ( pa p ) S a
và hướng theo trục 0x1.
Tác dụng cân bằng của các lực ma sát và áp suất dư lên bề mặt ngồi KCB là lực
khí động và được gọi là lực cản chính diện X .
Tác dụng cân bằng của các lực áp suất dư lên bề mặt tia khí 100 ’1’ được ký hiệu
X вз . Gọi lực này là lực cản bổ xung của thiết bị vào. Các lực X , X вз tác dụng dọc
theo trục 0x1 và coi là dương nếu ngược chiều 0x1.
Như vậy tác dụng cân bằng của các ngoại lực:
F R эфф F * X X вз .
Thay phương trình này vào đẳng thức (2.15) ta nhận được phương trình cuối cùng
cân bằng của động cơ phản lực đứng yên cố định trên các giá:
Q r
R эфф F * X X вз ( q r ) (
) 0.
dt
Ta xét thử nghiệm động cơ trong ống khí động. Từ các lực đã tính trên tác động
lên động cơ có thể chỉ đo lực áp suất của động cơ phản lực lên giá bằng các thiết bị:
Q r
R эфф ( q r ) (
) F * X X вз .
(4.16)
dt
Lực R эфф được gọi là lực đẩy hiệu dụng của động cơ.
Giả sử động cơ được thử nghiệm khơng có dịng khí (V = 0). Trong trường hợp
này khơng có lực cản chính diện, lực cản bổ xung của thiết bị vào cũng bằng 0, vì trên
gianh giới tia 100’1’ mọi nơi p = p∞ và Δt.p = 0. Lực áp suất của động cơ phản lực lên
giá khi đo bằng các thiết bị sẽ là:
7
Q r
) F *.
(4.16a)
dt
Các ngoại lực tạo bởi áp suất khí quyển, áp suất khí cháy tại tiết diện thoát của
ống phun và các lực biến phân xuất hiện do kết quả chuyển động khơng dừng của khí
cháy và chất lỏng bên trong động cơ phản lực làm xuất hiện phản lực và được gọi là
lực đẩy của động cơ hoặc đơn giản gọi là lực đẩy, ký hiệu P .
Như vậy lực đẩy của động cơ phản lực trong mọi điều kiện bay được xác định
theo biểu thức:
Q r
P ( q r ) F * (
).
(4.17)
dt
Khi đó lực đẩy hiệu dụng sẽ là:
R эфф P X X вз .
(4.18)
Ta tính đại lượng lực đẩy P. Ta xét (2.17) trên trục 0x 1 (các véc tơ hướng theo dọc
trục 0x1):
Qr
P qr ( pa p ) S a
.
(4.19)
dt
Tìm qr – lưu lượng động lượng của mơi trường qua vỏ cứng. Tính (4.5) trên trục
0x1 ta nhận được:
qr .vn vx dS .
( R эфф )V 0 ( q r ) (
Giả sử S∞ - diện tích mặt cắt 00’, trong mặt cắt này vn = vx = -V, ρv = ρv∞ và lưu
lượng động lượng là ρv∞ V2 S∞. Ở mặt cắt cửa thoát miệng phun aa’ ta lấy vận tốc dịng
chảy trung bình của khí cháy là ωa và mật độ khí ρva , kết quả nhận được là:
qr V 2 S a a2 Sa .
Ta ký hiệu mв.сек lưu lượng khơng khí vào động cơ trong một giây ( mв.сек VS )
còn mт.сек là lưu lượng nhiên liệu trong một giây, khi đó lưu lượng khí cháy thoát qua
miệng phun là: mв.сек mт.сек a a Sa và lưu lượng của động lượng là:
qr mв.секV (mв.сек mт.сек )a .
(4.20)
Thay (2.20) vào (2.19) cho lực đẩy của động cơ có thể viết:
Qr
P (mв.сек mт.сек )a mв.секV ( pa p )S a
.
(4.21)
dt
Công thức này cho trường hợp bay với vận tốc không đổi. Nếu giả thiết gia tốc
của KCB không làm ảnh hưởng đến chuyển động tương đối của chất khí thì công thức
này sẽ xác định lực đẩy động cơ phản lực mọi dạng trong các điều kiện bay khác nhau.
Thông thường khi tính lực đẩy P bỏ qua các lực suy biến và cơng thức trên có thể
viết:
P (mв.сек mт.сек )a mв.секV ( pa p )S a .
(4.22)
Trong động cơ tên lửa không sử dụng không khí từ khí quyển nên mв.сек 0 . Lưu
lượng khí thải qua ống phun là lưu lượng nhiên liệu mт.сек gồm lưu lượng của chất oxy
hoá và chất cháy. Suy ra lực đẩy của động cơ tên lửa là:
8
P mт.сек a ( pa p ) S a .
(4.23)
3. Nguyên tắc thiết lập các phương trình chuyển động
Liên hệ các kết quả của phần 1 và 2 ta chia ngoại lực ra gồm các lực liên quan đến
áp suất khí quyển và áp suất trên mặt cắt miệng phun. giả sử các lực có véc tơ chính
F * , véc tơ chính của các ngoại lực cịn lại ký hiệu F , khi đó phương trình (4.13) có
dạng:
dQ s
Q r
F F * ( q r ) (
) F k.
dt
dt
Nếu đưa vào phương trình này lực đẩy động cơ theo (4.17) thì ta nhận được biểu
thức định lý về động lượng của thiết bị bay phản lực:
dQ s
F P F k .
(4.24)
dt
Bằng cách tương tự thay vào phương trình (4.14) có thể nhận được biểu thức về
định lý mơ men chính động lượng của thiết bị phản lực so với trọng tâm 0:
dKs
M M дв M k .
(4.25)
dt
Trong đó: M - mơ men chính của tất cả các ngoại lực bao gồm các lực áp suất
khí quyển và áp suất khí cháy ở mặt cắt loa phụt lấy tương đối so với trọng tâm.
M дв - mô men chính so với trọng tâm của các lực đẩy của động cơ, các
mơ men bổ xung bởi áp suất khí quyển, bởi áp suất khí cháy ở tiết diện ra của loa phụt
và bởi độ không dừng của chuyển động chất khí và nhiên liệu lỏng bên trong khí cụ.
Từ phương trình (4.24), (4.25) đưa ra nguyên tắc thiết lập các phương trình
chuyển động của khí cụ bay phản lực như sau: Các phương trình chuyển động của KCB
phản lực ở thời điểm t bất kỳ có thể viết dưới dạng các phương trình chuyển động của
vật rắn nhận được trong kết quả làm đông cứng thiết bị phản lực ở thời điểm đó. Nếu
đưa số ngoại lực đặt vào vật rắn cố định này bao gồm các lực đẩy động cơ phản lực và
lực Coriolit.
3.1. Các phương trình chuyển động của tâm khối
Sau khi sử dụng khái niệm về tâm khối và lưu ý (4.12), trong phương trình (4.24)
có thể đặt:
dQ s
mi a ie ma e .
dt
Trong đó m = m(t) - khối lượng KCB ở thời điểm t;
- gia tốc theo của tâm khối của nó.
ae
Kết quả ta nhận được:
(4.26)
ma e F P F k .
Đôi khi trong trường hợp chung không nên viết phần trái của (4.26) trong dạng
dV e
thông thường m
. Rõ ràng khi tâm khối dịch chuyển tương đối so với vỏ KCB với
dt
9
vận tốc V r và gia tốc a r , còn vỏ quay tương đối so với hệ toạ độ qn tính với vận tốc
góc thì giữa tốc độ theo và gia tốc a e có mối quan hệ sau:
dV e
a e V r .
(4.27)
dt
dV a
Vì vậy ta đi đến gia tốc tuyệt đối của tâm khối a
với sự trợ giúp của công
dt
thức phổ biến sau:
(4.28)
a a e a r 2V r .
Suy ra khi tính đến (4.26) ta nhận được:
dV a
m
F P F k ma r 2mV r .
(4.29)
dt
Hai số hạng cuối vế phải của phương trình này có thể coi như các lực làm di
chuyển tâm khối của KCB so với vỏ.
Rõ ràng thiết lập các phương trình chuyển động của vật có thành phần thay đổi
được đi từ xác định các phản lực là bài toán thực sự phức tạp. Lực cơ bản từ các lực này
là phản lực – qr mà không thể đo một cách trực tiếp được. Vì vậy phải xác định lực đẩy
động cơ theo (4.22), đưa vào đó lực tạo bởi áp suất khí quyển và áp suất khí cháy ở mặt
cắt miệng phun (pa - p∞)Sa . Mặc dù lực này là ngoại lực, nhưng nó là thành phần tạo ra
lực đẩy – qr , khi thử động cơ trên giá thử có thể đo được lực tác động lên điểm cố định
động cơ xác định theo công thức (4.22). Tương ứng lực (p a - p∞) Sa được loại trừ từ số
các ngoại lực.
Ngoài lực đẩy P xác định theo (4.22) cịn có các thành phần các lực của KCB có
thành phần thay đổi:
- Các lực tạo bởi độ không dừng của chuyển động chất lỏng (nhiên liệu) và sản
phẩm cháy so với vỏ KCB;
- Các lực Corionit tạo bởi chuyển động của nhiên liệu và sản phẩm cháy trong
KCB quay tương đối so với hệ toạ độ quán tính;
- Các lực tạo bởi dịch chuyển của trọng tâm KCB so với vỏ.
Các lực kể trên rất nhỏ so với lực đẩy xác định theo (4.22), trong đó khơng thể đo trực
tiếp được. Phụ thuộc vào các giả thiết đưa ra khác nhau sẽ có các biểu thức lý thuyết
khác nhau. Trong động lực học thường bỏ qua các phản lực nhỏ kể trên và xác định các
lực đẩy của các động cơ phản lực theo biểu thức (4.22).
Với độ chính xác đủ cho thực tế phương trình véc tơ của chuyển động trọng tâm
KCB (2.29) có thể viết dưới dạng:
dV a
m
F P.
(4.30)
dt
Trong đó: m = m(t) - khối lượng KCB ở thời điểm t;
dV a
- gia tốc tâm khối trong hệ toạ độ quán tính;
dt
- véc tơ chính ngoại lực đặt vào KCB;
F
- véc tơ chính lực đẩy của động cơ phản lực.
P
10
Ngồi các ngoại lực tác dụng lên KCB cịn phải kể đến các lực như: trọng lực GT ,
lực khí động toàn phần R , lực tác dụng tương hỗ giữa KCB với thiết bị phóng…
3.2. Các phương trình chuyển động quay so với tâm khối
Bằng phương pháp tương tự xác định phương trình véc tơ gần đúng của chuyển
động quay KCB quanh tâm khối:
dK
M F M P .
(4.31)
dt
Trong đó K - mơ men chính (so với tâm khối) động lượng của các hạt của KCB “được
làm đông cứng” so với các trục đi qua trong tâm và chuyển động tịnh tiến với vận tốc
V a so với hệ toạ độ qn tính.
M F - mơ men chính (so với trọng tâm) của tất cả các ngoại lực tác dụng lên KCB
ngoại trừ lực áp suất khí quyển và áp suất khí cháy ở tiết diện thốt của ống phun.
M P - mơ men chính (so với trọng tâm) các lực đẩy của động cơ phản lực, các
lực tạo bởi chuyển động của chất lỏng và chất khí trong KCB khi quay.
Để đơn giản hố các phương trình chuyển động quay của KCB quanh trọng tâm ta
sẽ bỏ qua các mô men lực được tạo bởi độ không dừng chuyển động chất lỏng, chất khí
trong vỏ; sự dịch chuyển của trọng tâm so với vỏ vì các mơ men này đủ nhỏ.
3.3. Các phương trình véc tơ chuyển động của KCB so với trái đất
Chuyển động của KCB có thể xem như là tổng của chuyển động tịnh tiến được
xác định bởi chuyển đông của tâm khối và chuyển động quay.
Chuyển động của tâm khối KCB được xác định bằng phương trình (4.30):
dV a
m
F P.
dt
dV a
Gia tốc tuyệt đối a
có thể viết dưới dạng:
dt
a j je jk .
(4.32)
Trong đó: j - gia tốc tương đối;
j e - Gia tốc theo;
j k - Gia tốc Coriolit
Suy ra phương trình chuyển động của tâm khối KCB so với hệ toạ độ cố định nào
đó có dạng:
m j F P ( m j e ) ( m j k ).
(4.33)
Trong đó ( m j e ),( m j k ) tương ứng là lực quán tính theo và lực quán tính
Coriolit.
Giả sử ví dụ chuyển động của KCB được xét so với hệ toạ độ quay cùng với trái
đất với vận tộc góc з . Gốc 0 của hệ toạ độ này bố trí ở tâm trái đất, trục 0x và 0y nằm
11
trên mặt phẳng xích đạo; trục 0z trùng với trục quay của trái đất. Gia tốc tương đối sẽ là
gia tốc tâm khối KCB so với trái đất:
d з
je j0
r з (з r ).
(4.34)
dt
d з
Trong đó j 0 0 ;
0 khi dó gia tốc theo là:
dt
j e з (з r ).
(4.35)
Gia tốc Coriolit xuất hiện do sự quay của trái đất khi tồn tại vận tốc tương đối V
được xác định theo công thức:
j k 2(з V ).
(4.36)
Các cơng thức (4.35), (4.36) bảo tồn dạng của nó cho mọi hệ toạ độ quan hệ với
trái đất.
Phương trình chuyển động của tâm khối KCB trong hệ toạ độ quay cùng trái đất
dV
nếu tính đến j
có thể viết lại dưới dạng:
dt
dV
m
F P m j e m j k .
(4.37)
dt
Ta xét hệ toạ độ di động bất kỳ với điểm đầu là tâm khối KCB. Giả sử - vận
tốc góc quay của các trục hệ toạ độ này so với các trục của hệ toạ độ gắn với trái đất.
Khi đó:
dV d 'V
V .
(4.38)
dt
dt
d 'V
Trong đó
- đạo hàm cục bộ (địa phương) của véc tơ V theo thời gian, vận tốc đặc
dt
trưng của sự thay đổi véc tơ trong hệ toạ độ di động đang xét.
Khi đó phương trình véc tơ chuyển động của tâm khối KCB có thể viết dưới dạng:
d 'V
m
V F P m j e m j k .
(4.39)
dt
Quay KCB quanh tâm khối của nó được xác định bằng phương trình (4.31) bây
giờ viết dưới dạng:
dK
M .
(4.40)
dt
Trong đó: K - mơ men chính động lượng của KCB hoặc mô men động học;
M - mơ men chính của tất cả các ngoại lực so với tâm khối KCB (kể cả các
phản lực).
Khi xác định mơ men chính động lượng thường bỏ qua sự quay của trái đất coi
như là các trục của hệ toạ độ quán tính.
Tuân theo định lý về đạo hàm cục bộ:
12
dK d'K
K .
dt
dt
(4.41)
d'K
Trong đó:
- đạo hàm cục bộ của véc tơ K .
dt
Khi đó:
d'K
K M .
(4.42)
dt
Vị trí tâm khối KCB ở dạng véc tơ được xác định bằng véc tơ bán kính r nối từ
điểm gốc của hệ toạ độ đang xét đến tâm khối KCB.
Phương trình động học của chuyển động tâm khối KCB ở dạng véc tơ là:
dr
V .
(4.43)
dt
Trong đó: V - véc tơ vận tốc KCB so với hệ toạ độ đang xét.
Sự định hướng KCB trong không gian được xác định bằng ba góc Ơ le: χ, λ, μ.
.
.
.
Phương trình động học chuyển động quay của KCB liên quan các vận tốc góc , ,
với vận tốc góc KCB :
.
.
.
(4.44)
.
Trong nghiên cứu thực tế các phương trình véc tơ chuyển động KCB người ta
thay thế bằng các phương trình vơ hướng khi chiếu mỗi phương trình véc tơ lên ba trục
tọa độ.
Trong các bài tốn động lực học KCB có thể sử dụng các hệ toạ độ khác nhau.
Trong nhiều trường hợp chọn hệ toạ đỗ cho trước việc nghiên cứu sẽ đơn giản hơn
nhiều. Để nghiên cứu chuyến bay thường sử dụng hệ trục toạ độ đề các vng góc phải
và tương ứng với nó là các hệ toạ độ cầu.
3.4. Các phương trình chuyển động của KCB trong các hình chiếu lên các
trục hệ toạ độ quay
Nghiên cứu chuyến bay có thể đơn giản đáng kể khi đã chọn được hệ toạ độ. Thực
tế ln chỉ ra rằng tính hợp lý hơn cả để nhận được các phương trình chuyển động quay
KCB bằng sự thiết lập các phương trình véc tơ tương ứng trên các trục liên quan đến
KCB. Đôi khi chọn hệ toạ độ để thiết lập các phương trình vơ hướng của chuyển động
tâm khối nhìn chung phụ thuộc vào bài tốn đang xét.
Thiết lập phương trình (4.39) trên các trục toạ độ vng góc bất kỳ có gốc tại tâm
khối KCB. Giả sử - vận tốc góc quay của các trục này so với các trục cố định. Như đã
biết từ cơ học các hình chiếu từ phương trình (4.39) lên các trục di động đã cho sẽ có
dạng sau:
13
dV
m x yVz zVy Fx ;
dt
dV
m y zVx xVz Fy ;
(4.45)
dt
dVz
m
xVy yVx Fz ;
dt
Trong đó: Vx, Vy, Vz – các hình chiếu của véc tơ vận tốc tâm khối KCB lên các trục di
động.
Ωx, Ωy, Ωz - các hình chiếu vận tốc góc quay của các trục di động so với cố
định lên các trục di động;
ΣFFx, ΣFFy, ΣFFz – các hình chiếu của tất cả các lực tác dụng lên KCB lên các
trục di động.
Để thiết lập các phương trình quay của KCB quanh tâm khối ta sử dụng phương
trình véc tơ (4.42) trong đó:
K - mơ men chính động lượng của vật rắn cố định S.
- mơ men chính của tất cả các lực đặt lên vật S.
M
Ở thời điểm đông cứng t vật rắn S và KCB phản lực có sự phân bố khối lượng
như nhau, suy ra các tâm khối, các hướng của các trục quán tính chính trung tâm trùng
nhau và các giá trị I1(t), I2(t), I3(t) - các mô men quán tính với các trục này.
Chuyển động của vật S trùng với chuyển động của vỏ KCB nó sẽ có cùng tốc độ
góc quay so với hệ toạ độ quán tính và tại thời điểm t bằng với các hình chiếu của tốc
độ này lên các trục quán tính chính trung tâm (ω1, ω2, ω3).
dK
Thoả mãn nguyên tắc đơng cứng các hình chiếu của đạo hàm
tại thời điểm t
dt
sẽ được tính theo quy tắc cơ học thơng thường. Vì vậy sau khi đã chọn các trục toạ độ là
các trục quán tính chính trung tâm của vật và sử dung các kết quả động lực học vật rắn
đã biết ta có thể viết các phương trình chuyển động quay dưới dạng Ơle:
d
I1 1 ( I 3 I 2 )23 M 1
dt
d 2
I2
( I1 I 3 )31 M 2
(4.46)
dt
d 3
I3
( I 2 I1 )12 M 3
dt
Trong đó M 1 , M 2 , M 3 - các tổng hình chiếu các mơ men lực lên các trục qn
tính chính trung tâm.
Các phương trình (4.46) được viết cho thời điểm cố định bất kỳ t. Khi thay đổi
thời điểm đông cứng t ta sẽ nhận được vật rắn S với các mơ men qn tính khác và với
các hướng khác của các trục quán tính chính trung tâm. Như vậy các phương trình (4.46)
ở các thời điểm khác nhau là hình chiếu phương trình (4.42) lên các trục toạ độ khác
14
nhau. Để các phương trình chuyển động quay (4.46) viết trong hệ toạ độ duy nhất cần
tính đến việc quay các trục quán tính chính trung tâm so với vỏ KCB.
Tiếp đến ta sẽ sử dụng các phương trình (4.46), giả sử các hướng của các trục
quán tính chính trung tâm không thay đổi so với vỏ KCB trong tất cả thời gian cháy của
nhiên liệu. Giả thiết như vậy cho phép như quay các trục quán tính chính trung tâm so
với vỏ đưa ra trong các phương trình (4.46) những thành phần bổ xung mà trong đa số
các bài toán thực tế là lượng rất nhỏ bỏ qua.
4. Các trục toạ độ, các quan hệ hình học và động học
Các trục toạ độ
Để nghiên cứu chuyển động KCB ứng dụng các hệ toạ độ phải vng góc: hệ toạ
độ mặt đất, hệ toạ độ lien kết, hệ toạ độ tốc độ, bán tốc độ và bán lien kết….
Hệ trục toạ độ mặt đất
Các trục của hệ này 0zз yз zз (hình 4.3) cố định với trái đất quay cùng trái đất và
gọi tắt là các trục toạ độ mặt đất.
Gốc toạ độ được chọn trên bề mặt trái đất, một điểm nào đó chẳng hạn tại điểm
phóng KCB. Trục 0yз hướng theo bán kính véc tơ nối từ tâm trái đất đến điểm phóng;
trục 0xз nằm ngang theo hướng tuỳ ý, để thuận lợi mặt phẳng chuyến bay trùng với mặt
phẳng 0xз yз ; trục 0xз tạo với mặt phẳng kinh tuyến cục bộ một góc ψ gọi là góc phương
vị phóng; trục 0xз có hướng để tạo ra hệ toạ độ phải.
Hệ toạ độ phóng
15
Hệ toạ độ phóng 0xc yc zc (hình 4.4) cũng được lien hệ với trái đất và quay cùng
trái đất. Gốc toạ độ bố trí tại điểm phóng; trục 0y c hướng lên ngược với chiều trọng lực;
trục 0xc tạo với mặt phẳng kinh tuyến góc phương vị phóng ψ; trục 0z c tương ứng hệ toạ
độ phải. Khi phóng các trục lien kết của tên lửa đạn đạo hướng theo các trục của hệ toạ
độ phóng (hình 4.5). Trục dọc tên lửa 0x 1 trùng với trục 0yc; trục ngang 0y1 theo hướng
ngược chiều xc; trục 0z1 hương theo trục 0zc.
Hệ trục toạ độ phóng ban đầu
Các trục của hệ toạ độ phóng ban đầu 0x0 y0 z0 ở thời điếm phóng trùng với các
trục của hệ toạ độ phóng. Sau đó hệ toạ độ phóng ban đầu khơng thay đổi hướng tương
đối so với khơng gian qn tính, cịn hệ toạ độ phóng cố định cứng với trái đất và quay
cùng trái đất quanh trục quay của nó sau khoảng thời gian t quay một góc ω з t. Hệ toạ độ
phóng ban đầu chính là hệ toạ độ quán tính.
Hệ toạ độ địa tâm
Hệ toạ độ này với gốc là tâm trái đất và với các trục lien quan với trái đất được sử
dụng khi nghiên cứu trường trọng lực. Các mặt phẳng cơ sở là các mặt phẳng xích đạo
và mặt phẳng kinh tuyến gốc.
16
Vị trí trọng tâm KCB có thể được xác định bằng ba toạ độ đề các x, y, z hoặc
thuận lợi hơn là bằng ba toạ độ cầu λ, φ ц, r. Kinh độ λ và vĩ độ ωц (hình 4.6), toạ độ r là
khoảng cách từ tâm trái đất đến trọng tâm KCB.
Hệ toạ độ địa tâm cục bộ
Gốc hệ toạ độ này 0xг yг zг (hình 4.6) trùng với tâm khối KCB; trục 0xг song song
với tiếp tuyến của kinh tuyến cục bộ và hướng lên phía bắc; trục 0y г hướng theo bán
kính véc tơ r ; trục 0zг song song với mặt phẳng xích đạo.
Hệ toạ độ tốc độ và bán tốc độ
Gốc hệ toạ độ này 0 bố trí tại tâm khối KCB; trục
0x hướng theo véc tơ vận tốc tức là hướng theo tiếp
tuyến với quỹ đạo bay theo hướng bay; trục 0y và 0z
nằm trong mặt phẳng vng góc với quỹ đạo. Trong
động học bay người ta chọn trục 0y nằm trong mặt
phẳng đối xứng KCB (là hệ toạ độ tốc độ 0xyz) và cũng
có thể nằm trong mặt phẳng đứng (là hệ toạ độ bán tốc
độ 0xy*z*).
Các ma trận cosin có hướng
Các ma trận của các góc giữa các trục hệ toạ độ lien
kết
và hệ toạ độ phóng ban đầu
Sự định hướng KCB so với hệ toạ độ phóng ban đầu được xác định bằng ba góc
giữa hệ toạ độ liên kết 0x1y1z1 và hệ toạ độ phóng ban đầu 0x0y0z0 (hình 4.7)
Góc trượt ξ là góc giữa hình chiếu trục dọc KCB 0x 1 lên mặt phẳng 0x0z0 và trục
0x0.
Góc ngóc chúc φT là góc giữa trục dọc KCB 0x1 và mặt phẳng 0x0z0.
Góc nghiêng η là góc giữa trục ngang 0y1 và mặt phẳng đi qua trục 0x1 và 0y0.
17
Cosin các góc giữa các trục hệ toạ độ lien kết và hệ toạ độ phóng ban đầu được
đưa ra ở bảng 4.1.
Ta tìm cosin các góc giữa các trục hệ toạ độ phóng ban đầu và hệ toạ độ lien kết.
Để làm được điều đó qua trọng tâm KCB – gốc hệ toạ độ lien kết kẻ các trục của 0x 0y0z0
song song với các trục hệ toạ độ phóng ban đầu. Quay hệ này đi một góc ξ quanh trục
0y0, sao cho mặt phẳng 0x’y’ đi qua trục 0x1. Ký hiệu hệ nhận được là: 0x’y’z’.
Các công thức chuyển toạ độ biểu diễn thuận lợi dưới dạng ma trận. Khi ký hiệu
'
ma trận cột với các phần tử x’,y’,z’ qua x tức là:
x'
x ' y ' .
z'
Bảng 4.1. Các cosin các góc giữa các trục hệ toạ độ liên kết và các trục hệ toạ độ
phóng ban đầu:
Trục
0x1
0y1
0z1
0x0
cosξ cosφт
- cosξsinφтcosη + sinξ sinη
cosξ sinφт sinη + sinξ cosη
0y0
sinφт
cosφт cosη
- cosφт sinη
0z0
-sinξ cosφт
cosξ sinη + sinξ sinφт cosη
cosξ cosη – sinξ sinφт sinη
Còn với các thành phần x0, y0, z0 qua x 0 ta nhận được công thức sau chuyển từ
hệ 0x0y0z0 sang hệ 0x’y’z’ :
(4.47)
x ' x 0 .
Trong đó ma trận chuyển từ hệ toạ độ 0x0y0z0 sang hệ 0x’y’z’ có dạng:
cos 0 sin
0
1
0
(4.48)
sin 0 cos
’ ’ ’
’
Ta quay hệ 0x y z quanh trục 0z đi một góc φт sao cho trục 0x” trùng với trục
0x1 ta nhận được hệ 0x” y” z”. Công thức chuyển toạ độ tương ứng khi quay trục một góc
φт có dạng:
x" x '
(4.49)
Trong đó:
cos т sin т 0
sin т cos т 0
(4.50)
0
0
1
Quay quanh trục 0x” một góc η, các trục 0y”’ và 0z”’ trùng với các trục 0y1 và 0z1.
Chuyển từ hệ 0x” y” z” sang hệ 0x1y1z1 được thực hiện bằng công thức sau:
18
x1 x" .
(4.51)
Trong đó:
0
0
1
0 cos sin
(4.52)
0 sin cos
Thay các phương trình (4.47) và (4.49) vào (4.51) ta nhận được phương trình ma
trận chuyển từ hệ toạ độ phóng ban đầu sang hệ trục toạ độ liên kết:
x1 x 0 x 0 .
(4.53)
Trong đó ma trận Γ là ma trận các cos có hướng, tức là cos các góc giữa các trục
hệ toạ độ phóng ban đầu và hệ toạ độ lien kết (bảng 4.1):
coscosт
sinт
-sincos т
sinsin cos sin
cos т cos
-cossinт cos
sin sin т cos
(4.54)
sin cos
cos cos
cos т sin
cos sin т sin
sin sin т sin
Cosin của các góc giữa các trục hệ toạ độ lien kết và hệ tạo độ địa lý cục bộ
Hướng KCB so với các trục hệ toạ độ địa lý được xác định bởi ba góc ψ, υ, γ
tương tự như các góc ξ, φт, η.
Góc trượt ψ là góc giữa trục địa lý cục bộ 0x г và hình chiếu trục dọc 0x1 lên mặt
phẳng ngang.
Bảng 4.1a: Các cosin các góc giữa các trục hệ toạ độ liên kết và hệ toạ độ địa lý cục bộ
Trục
0xг
0yг
0zг
0x1
cosψ cosυ
sinυ
-sinψ cosυ
0y1
- cosψsinυcosγ + sinψ sinγ cosυ cosγ
cosψ sinγ + sinψ sinυ cosγ
0z1
cosψ sinυ sinγ + sinψ cosγ - cosυ sinγ
cosψ cosγ – sinψ sinυ sinγ
Góc ngóc chúc υ là góc giữa trục dọc 0x1 và mặt phẳng ngang.
Góc nghiêng γ là góc giữa trục 0y1 và mặt phẳng đứng đi qua trục dọc 0x1.
Các góc ψ, υ, γ được biểu diễn trên hình 4.8. Các cosin có hướng của các góc
giữa các trục hệ toạ độ lien kết và hệ trục toạ độ địa lý cục bộ được chỉ ra trên bảng 4.1a.
Cosin các góc giữa các trục của hệ toạ độ bán tốc độ và hệ toạ độ địa lý cục bộ
19
Trong hệ toạ độ bán tốc độ trục 0y * ln ln nằm trong mặt phẳng đứng, cịn
trục 0z* ln nằm ngang. Vì vậy vị trí của hệ toạ độ bán tốc độ so với hệ toạ độ địa lý
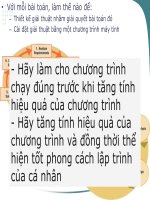
cục bộ được xác định chỉ bởi hướng của trục 0x, tức là bởi hai góc sau: (hình 4.9).
- Ψ là góc giữa hình
chiếu véc tơ tốc độ V lên mặt
phẳng nằm ngang và trục
0xг.
- Θ là góc giữa véc tơ
tốc độ V và mặt phẳng nằm
ngang.
Góc Θ thường được
gọi là góc nghiêng quỹ đạo,
góc Ψ gọi là góc ngoặt quỹ
đạo.
Ta tiến hành quay lần
lượt hệ trục toạ độ địa lý cục bộ 0xгyгzг đi một góc Ψ và Θ đến khi hướng của các trục
của nó trùng với hệ trục toạ độ bán tốc độ 0xy*z* (hình 4.9). Ta nhận được kết quả sau:
x x г .
(4.55)
cos cos sin sin cos
cos sin cos sin sin
sin
0
cos
(4.56)
Cosin các góc giữa các trục của hệ toạ độ địa lý cục bộ và hệ toạ độ tốc độ
Vị trí hệ toạ độ tốc độ và hệ toạ độ địa lý cục bộ xác định bằng các góc Ψ, Θ và γ c
tương tự như các góc ψ, υ và γ. Khi đó góc γ c gọi là góc nghiêng là góc giữa trục 0y và
mặt phẳng đứng 0xyг đi qua véc tơ tốc độ bay. Cần nhớ rằng góc nghiêng γ c khác với
góc nghiêng γ.
Dễ dàng thấy rằng vị trí của hệ toạ độ tốc độ so với hệ toạ độ bán tốc độ được xác
định chỉ bởi góc γc. Khi γc=0 tức là mặt phẳng đối xứng KCB trùng với mặt phẳng đứng,
hệ toạ độ tốc độ và hệ toạ độ bán tốc độ trùng nhau.
Bảng 4.2 đưa ra cosin các góc giữa các trục của hệ toạ độ tốc độ và bán tốc độ,
còn bảng 4.3 là giữa hệ toạ độ bán tốc độ và hệ toạ độ địa lý cục bộ.
Trục
0x
0y
0z
0x
1
0
0
0y*
0
cosγc
-sinγc
0z*
0
sinγc
cosγc
Bảng 4.2
Trục
0xг
0yг
0zг
0x
cosΘcosΨ
sinΘ
-cosΘsinυ
20