Điện Tử Cảm Biến - Cảm Biến Công Nghiệp part 9 docx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (223.12 KB, 9 trang )
S
1
S
21
1
m
E
R
R
E
RR
R
V =
+
=
(4.3)
Trong đó R
1
là hàm phụ thuộc vị trí của trục quay, vị trí này xác định phần của R
1
chịu
ảnh hưởng của từ trường còn R = R
1
+ R
2
= const.
Từ hình 4.5b ta nhận thấy điện áp đo chỉ tuyến tính trong một khoảng ~90
o
đối
với điện kế quay. Đối với điện kế dịch chuyển thẳng khoảng tuyến tính chỉ cỡ vài
mm.
4.3. Cảm biến điện cảm
Cảm biến điện cảm là nhóm các cảm biến làm việc dựa trên nguyên lý cảm ứng
điện từ. Vật cần đo vị trí hoặc dịch chuyển được gắn vào một phần t
ử của mạch từ gây
nên sự biến thiên từ thông qua cuộn đo. Cảm biến điện cảm được chia ra: cảm biến tự
cảm và hỗ cảm.
4.3.1. Cảm biến tự cảm
a) Cảm biến tự cảm có khe từ biến thiên
- Cảm biến tự cảm đơn: trên hình 4.6 trình bày sơ đồ nguyên lý cấu tạo của một
số loại cảm biến tự
cảm đơn.
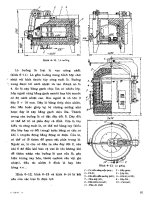
Hình 4.6 Cm bin t cm
1) Lõi st t 2) Cun dây 3) Phn ng
X
V
X
V
a) b) c)
1
2
3
1
2
3
1
2
R
δ
R
2
R
1
1
2
3
Hình 4.5 in th k in t
30%
50%
70%
0
O
180
O
360
O
V
m
/E
S
a)
b)
Cảm biến tự cảm đơn gồm một cuộn dây quấn trên lõi thép cố định
(phần tĩnh) và một lõi thép có thể di động dưới tác động của đại lượng đo (phần động),
giữa phần tĩnh và phần động có khe hở không khí tạo nên một mạch từ hở.
Sơ đồ hình 4.6a: dưới tác động của đại lượng đo X
V
, phần ứng của cảm
biến di chuyển, khe hở không khí
δ trong mạch từ thay đổi, làm cho từ trở của mạch từ
biến thiên, do đó hệ số tự cảm và tổng trở của cuộn dây thay đổi theo.
Sơ đồ hình 4.6b: khi phần ứng quay, tiết diện khe hở không khí thay đổi,
làm cho từ trở của mạch từ biến thiên, do đó hệ số tự cảm và tổng trở của cuộn dây
thay đổi theo.
Hệ số tự cảm củ
a cuộn dây cũng có thể thay đổi do thay đổi tổn hao sinh
ra bởi dòng điện xoáy khi tấm sắt từ dịch chuyển dưới tác động của đại lượng đo X
v
(hình 4.6c).
Nếu bỏ qua điện trở của cuộn dây và từ trở của lõi thép ta có:
δ
μ
==
δ
sW
R
W
L
0
2
2
Trong đó:
W- số vòng dây.
s
R
0
μ
δ
=
δ
- từ trở của khe hở không khí.
δ - chiều dài khe hở không khí.
s - tiết diện thực của khe hở không khí.
Trường hợp W = const ta có:
δ
δ∂
∂
+
∂
∂
= d
L
ds
s
L
dL
Với lượng thay đổi hữu hạn
Δδ và Δs ta có:
()
δΔ
δΔ+δ
μ
−Δ
δ
μ
=Δ
2
0
00
2
0
0
2
sW
s
W
L
(4.4)
Độ nhạy của cảm biến tự cảm khi khe hở không khí thay đổi (s=const):
2
0
0
0
1
L
L
S
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
δ
δΔ
+δ
−=
δΔ
Δ
=
δ
(4.5)
Độ nhạy của cảm biến tự cảm khi thay đổi tiết diện không khí (
δ = const):
0
0
s
s
L
s
L
S =
Δ
Δ
=
(4.6)
Tổng trở của cảm biến:
δ
μω
=ω=
sW
LZ
0
2
(4.7)
Từ công thức (4.7) ta thấy tổng trở Z của cảm biến là hàm tuyến tính với tiết diện khe
hở không khí s và phi tuyến với chiều dài khe hở không khí
δ.
Đặc tính của cảm biến tự cảm đơn Z = f(
Δδ) là hàm phi tuyến và phụ thuộc tần số
nguồn kích thích, tần số nguồn kích thích càng cao thì độ nhạy của cảm biến càng cao
(hình 4.7).
L = f
(
Δ
δ
)
Z
5000Hz
= f
(
Δ
δ
)
Z
500Hz
= f
(
Δ
δ
)
Hình 4.7 S ph thuc gia L, Z vi chiu dày khe h không khí δ
Z, L
Δ
δ
- Cảm biến tự cảm kép lắp theo kiểu vi sai: Để tăng độ nhạy của cảm biến và tăng
đoạn đặc tính tuyến tính người ta thường dùng cảm biến tự cảm kép mắc theo kiểu vi
sai (hình 4.8).
Đặc tính của cảm biến tự cảm kép vi sai có dạng như hình 4.9.
b) Cảm biến tự cảm có lõi từ di động
Cảm biến gồm mộ
t cuộn dây bên trong có lõi từ di động được (hình 4.10).
X
V
X
V
X
V
a)
b)
c)
Hình 4.8 Cm bin t cm kép mc theo kiu vi sai
L
1
= f
(
δ
)
Hình 4.9 c tính ca cm bin t cm kép lp vi sai
L
1
- L
2
= f(
δ
)
L
2
= f(
δ
)
δ
L
Hình 4.10 S nguyên lý cm bin t cm có lõi t
1) Cun dây 2) Lõi t
l
0
l
f
l
X
V
1
2
Dưới tác động của đại lượng đo X
V
, lõi từ dịch chuyển làm cho độ dài l
f
của lõi từ nằm trong cuộn dây thay đổi, kéo theo sự thay đổi hệ số tự cảm L của cuộn
dây. Sự phụ thuộc của L vào l
f
là hàm không tuyến tính, tuy nhiên có thể cải thiện
bằng cách ghép hai cuộn dây đồng dạng vào hai nhánh kề sát nhau của một cầu điện
trở có chung một lõi sắt.
4.3.2. Cảm biến hỗ cảm
Cấu tạo của cảm biến hỗ cảm tương tự cảm biến tự cảm chỉ khác ở chỗ có thêm
một cuộn dây đo (hình 4.11).
Trong các cảm biến đơn khi chiều dài khe hở không khí (hình 4.11a) hoặc ti
ết
diện khe không khí thay đổi (hình 4.11b) hoặc tổn hao do dòng điện xoáy thay đổi
(hình 4.11c) sẽ làm cho từ thông của mạch từ biến thiên kéo theo suất điện động e
trong cuộn đo thay đổi.
- Cảm biến đơn có khe hở không khí:
Từ thông tức thời:
δ
μ
==Φ
δ
siW
R
iW
011
t
i - giá trị dòng điện tức thời trong cuộn dây kích thích W
1
.
Hình 4.11 Cm bin h cm
1) Cun s cp 2) Gông t 3) lõi t di ng 4) Cun th cp (cun o)
a)
3
X
V
1
2
~
b)
1
2
3
c)
X
V
3
4
~
X
V
4
~
φ
1
φ
2
d)
X
V
~~
e)
~
X
V
~
)
4
4
1
Sức điện động cảm ứng trong cuộn dây đo W
2
:
dt
di
.
sWW
dt
d
We
012t
2
δ
μ
−=
Φ
−=
W
2
- số vòng dây của cuộn dây đo.
Khi làm việc với dòng xoay chiều
tsinIi
m
ω
=
, ta có:
tcosI
sWW
e
m
012
ωω
δ
μ
−=
và giá trị hiệu dụng của suất điện động:
δ
=ω
δ
μ
−=
s
kI
sWW
E
012
I - giá trị hiệu dụng của dòng điện,
IWWk
012
ω
μ
=
.
Với các giá trị W
2
, W
1
, μ
0
, ω và I là hằng số, ta có:
δ
δ∂
∂
+
∂
∂
= d
E
ds
s
E
dE
Hay
()
2
0
0
ks
s
kE
δΔ+δ
δ
Δ
−
∂
Δ
=Δ
(4.8)
Độ nhạy của cảm biến với sự thay đổi của chiều dài khe hở không khí
δ (s = const):
2
0
0
0
2
0
2
0
1
E
1
ksE
S
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
δ
δΔ
+δ
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
δ
δΔ
+δ
−=
δΔ
Δ
=
δ
(4.9)
Còn độ nhạy khi tiết diện khe hở không khí s thay đổi (
δ = const):
0
0
0
S
s
E
k
s
E
S =
δ
=
Δ
Δ
=
(4.10)
0
0
0
ks
E
δ
=
- sức điện động hỗ cảm ban đầu trong cuộn đo W
2
khi X
V
= 0.
Ta nhận thấy công thức xác định độ nhạy của cảm biến hỗ cảm có dạng tương tự
như cảm biến tự cảm chỉ khác nhau ở giá trị của E
0
và L
0
. Độ nhạy của cảm biến hỗ
cảm S
δ
và S
S
cũng tăng khi tần số nguồn cung cấp tăng.
- Cảm biến vi sai: để tăng độ nhạy và độ tuyến tính của đặc tính cảm biến người ta
mắc cảm biến theo sơ đồ vi sai (hình 4.11d,đ,e). Khi mắc vi sai độ nhạy của cảm biến
tăng gấp đôi và phạm vi làm việc tuyến tính mở rộng đáng kể.
- Biến thế vi sai có lõi từ: gồm bốn cuộn dây ghép đồng trục tạo thành hai cảm biến
đơn đối xứ
ng, bên trong có lõi từ di động được (hình 4.12). Các cuộn thứ cấp được nối
ngược với nhau sao cho suất điện động trong chúng triệt tiêu lẫn nhau.
Về nguyên tắc, khi lõi từ ở vị trí trung gian, điện áp đo V
m
ở đầu ra hai cuộn thứ
cấp bằng không. Khi lõi từ dịch chuyển, làm thay đổi mối quan hệ giữa cuộn sơ cấp
với các cuộn thứ cấp, tức là làm thay đổi hệ số hỗ cảm giữa cuộn sơ cấp với các cuộn
thứ cấp. Khi điện trở của thiết bị đo đủ lớn, điện áp đo V
m
gần như tuyến tính với hiệu
số các hệ số hỗ cảm của hai cuộn thứ cấp.
4.4. Cảm biến điện dung
4.4.1. Cảm biến tụ điện đơn
Các cảm biến tụ điện đơn là một tụ điện phẳng hoặc hình trụ có một bản cực gắn
cố định (bản cực tĩ
nh) và một bản cực di chuyển (bản cực động) liên kết với vật cần
đo. Khi bản cực động di chuyển sẽ kéo theo sự thay đổi điện dung của tụ điện.
- Đối với cảm biến hình 4.13a: dưới tác động của đại lượng đo X
V
, bản cực động di
chuyển, khoảng các giữa các bản cực thay đổi, kéo theo điện dung tụ điện biến thiên.
δ
εε
=
s
C
0
ε - hằng số điện môi của môi trường.
ε
0
- hằng số điện môi của chân không.
s - diện tích nằm giữa hai điện cực.
δ - khoảng cách giữa hai bản cực.
Hình 4.12 Cm bin h cm vi sai
1) Cun s cp 2) Cun th cp 3) Lõi t
~
~
1
2
2
3
- Đối với cảm biến hình 4.13b: dưới tác động của đại lượng đo X
V
, bản cực động di
chuyển quay, diện tích giữa các bản cực thay đổi, kéo theo sự thay đổi của điện dung
tụ điện.
α
δ
πε
=
δ
ε
= .
360
rs
C
2
00
(4.11)
α - góc ứng với phần hai bản cực đối diện nhau.
Đối với cảm biến hình 4.13c: dưới tác động của đại lượng đo X
V
, bản cực động
di chuyển thẳng dọc trục, diện tích giữa các bản cực thay đổi, kéo theo sự thay đổi của
điện dung.
l.
)r/rlog(
2
C
12
0
πε
=
(4.12)
Xét trường hợp tụ điện phẳng, ta có:
δ
ε
=
s
C
δ
δ∂
∂
+
∂
∂
+ε
ε∂
∂
= d
C
ds
s
C
d
C
dC
Đưa về dạng sai phân ta có:
()
δΔ
δΔ+δ
ε
−Δ
δ
ε
+εΔ
δ
=Δ
2
0
00
0
0
0
0
s
s
s
C
(4.13)
Khi khoảng cách giữa hai bản cực thay đổi (
ε = const và s=const), độ nhạy của
cảm biến:
δ
X
V
α
X
V
X
V
a)
b)
c)
Hình 4.13 Cm bin t in n
()
2
0
00
C
s
C
S
δΔ+δ
ε
−=
δΔ
Δ
=
δ
(4.14)
Khi diện tích của bản cực thay đổi (
ε = const và δ = const), độ nhạy của cảm
biến:
0
0
S
C
s
C
S
δ
ε
=
Δ
Δ
=
(4.15)
Khi hằng số điện môi thay đổi ( s = const và
δ = const), độ nhạy của cảm biến:
0
0
C
s
C
S
δ
=
εΔ
Δ
=
ε
(4.16)
Nếu xét đến dung kháng:
sC
1
Z
ωε
δ
=
ω
=
δ
δ∂
∂
+
∂
∂
+ε
ε∂
∂
= d
Z
ds
s
Z
d
Z
dZ
Đưa về dạng sai phân:
() ()
δΔ
ωε
+Δ
Δ+ωε
δ
−εΔ
εΔ+εω
δ
−=Δ
00
2
00
0
2
00
0
s
1
s
sss
Z
Tương tự trên ta có độ nhạy của cảm biến theo dung kháng:
()
2
00
0
Z
s
S
εΔ+εω
δ
−=
ε
(4.17)
()
2
00
0
Zs
ss
S
Δ+ωε
δ
−=
(4.18)
00
Z
s
1
S
ωε
=
δ
(4.19)
Từ các biểu thức trên có thể rút ra: