Hệ thống điều khiển số -Giới thiệu về động cơ không đồng bộ và mô hình potx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (3.01 MB, 31 trang )
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Hệ thống điều khiển số
-Giới thiệu về động cơ không đồng
bộ và mô hình động cơ
-Giới thiệu các hệ qui chiếu
Hệ thống điều khiển số
Bộ môn Thiết bị điện
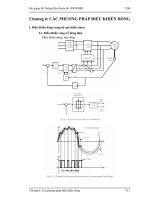
Review
Một động cơ không đồng bộ được nối với ngõ ra của một bộ
nghịch lưu dùng thuật toán vector không gian SVM. Tần số
đóng cắt của bộ nghịch lưu là 10kHz, V
dc
= 530V và có tần
số ra 40Hz, điện áp ra 190V hiệu dụng. Tại thời điểm 1ms và
7ms, xác định các vector sử dụng và thời gian tương ứng.
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Rotor
Stator
Cấu tạo động cơ kđb: stator và rotor
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Rotor lồng sóc
Rotor dây quấn
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Nguyên lý họat động của động cơ kđb ba pha:
• Nếu tốc độ rotor bằng tốc độ từ truờng stator, thì điện áp, dòng cảm
ứng và moment sẽ bằng không. Vì thế tốc độ rotor phải thấp hơn tốc
độ đồng bộ.
• Sự chênh lệch giữa tốc độ rotor và tốc độ từ trường stator (tốc độ đồng
bộ) gọi là tốc độ trượt. Độ trượt s được định nghĩa như sau:
s = (n
s
- n
r
) / n
s
hay s = (w
e
– w
r
)/w
e
trong đó n
s
= 60 f / p
• Tần số dòng điện rotor:
f
r
= s f
• Độ trượt có giá trị thông thường từ 1 tới 5 %
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Mạch tương đương
của động cơ không
đồng bộ
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Giản đồ năng lượng.
P
in
=Real(3 V
S
I
S
*)
Các tổn hao
cơ
Tổn hao đồng Rotor
• 3 I
R
2
R
R
Tổn hao đồng Stator
• 3 I
S
2
R
S
P
out
= T
out
m
P
cơ lt
= T
e
m
P
e
= T
e
w
e
P
e
= 3 I
R
2
(R
R
/ s)
P
cơ lt
= 3 I
R
2
R
R
(1- s) / s
P
out
= P
cơ lt
- Δ
P
cơ
Tổn hao lõi thép
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Giới thiệu về động cơ KĐB
Đặc tính moment – tốc độ.
P: số cực
w
e
= 2*pi*f
e
w
mech
= 2*w
elec
/P
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Đặc tính
moment-tốc độ
• Điểm P ứng với động cơ có
tốc độ định mức (có trên nhãn
của động cơ)
• Đoạn OP được gọi là vùng
hoạt động bình thường của
động cơ
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Đặc tính
moment-tốc độ
Trường hợp này xảy ra khi:
• Moment lớn hơn định mức
hoặc
• Động cơ quá tải
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Điều khiển động cơ kđb ở chế độ
xác lập
Khi động cơ nối trực tiếp với nguồn:
• Dòng khởi động cao tác động xấu tới nguồn
• Tần số w
e
và điện áp vào V
S
không thay đổi
• Tốc độ trong khoảng từ w
r đm
tới w
e
và phụ thuộc tải
Để khắc phục thì có thể sử dụng các bộ biến đổi công suất:
• Điều khiển V/f (thay đổi điện áp và tần số)
• Thay đổi điện áp, tần số không đổi
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Điều khiển động cơ kđb ở chế độ
xác lập
Bộ khởi động mềm dùng
triac (2 SCR mắc đối song)
Thay đổi góc kích SCR để
thay đổi điện áp cung cấp
Khi α tăng thì dòng và áp
càng bị méo dạng chỉ
nên được dùng khi khởi
động
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Điều khiển động cơ kđb ở chế độ
xác lập
Điều khiển V/f
Tốc độ của động cơ có thể được
thay đổi do tần số cung cấp thay
đổi.
Khi w
e
thay đổi thì đường đặc
tính moment-tốc độ cũng thay đổi
Để hình dạng đặc tính không đổi
thì điện áp phải thay đổi tỉ lệ với
tần số V
s
= k.w
e
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Luật điều khiển V/f
Mục đích duy trì từ thông không
đổi khi thay đổi tần số
Ф = L.I
V = Z.I = (ωL).I + R
s
.I
V ~ 2πf.Ф (bỏ qua R.I)
Ф ~ (1/4,44).(V/f)
Ở vùng tốc độ thấp, không thể bỏ qua
thành phần R.I (f nhỏ nên điện áp rơi
trên R.I trở nên đáng kể so với rơi trên
điện kháng). Do đó đặc tính V/f thường
bắt đầu tại V
0
> 0 để bù lại sụt áp do R.I
V
0
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Field Weakening (suy yếu từ
trường)
Nếu V
s
được giữ nguyên ở
giá trị V
max
, w
e
có thể tăng
lên nếu giảm dòng từ hoá I
0
(làm suy yếu từ trường)
Để làm yếu từ trường, ta chỉ cần
tăng w
e
và giữ V
s
không đổi.
Nếu V
s
=V
max
, moment sẽ giảm khi
w
e
tăng lên
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Bộ nghịch lưu tiếp áp
Dạng mạch trên gọi là bộ nghịch lưu tiếp áp (voltage-fed
inverter): tạo dạng sóng ngõ ra V/f thay đổi
Được sử dụng phổ biến
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Ma trận chuyển đổi 3 pha – 2 pha
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Qui đổi sang 2 pha
sa
1 1
3 3
1 2
3 3
s
s sb sc
sa sb
v v
v v v
v v
Chuyển từ hệ toạ độ abc αβ (hệ tọa độ tĩnh) dq
(hệ tọa độ quay) mà vẫn giữ nguyên được tình trạng của
từ thông và moment
cos sin
sin cos
sd s s
sq s s
v v v
v v v
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Qui đổi sang 2 pha
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Chuyển đổi hệ qui chiếu
abc αβ dq
as
cs
1 3
2 2
1 3
2 2
s
bs s s
as bs s s
u u
u u u
u u u u u
sa
1 1
3 3
1 2
3 3
s
s sb sc
sa sb
u u
u u u
u u
cos sin
sin cos
sd s s
sq s s
u u u
u u u
cos sin
sin cos
s sd sq
s sd sq
u u u
u u u
Tương tự cho việc chuyển đổi hệ qui
chiếu cho dòng điện
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Vector không gian
PT nguồn 3 pha
Vector không gian dòng và áp stator
stator voltage vector
2
3
b
c
a
v t
a
( )
v t
b
( )
v t
c
( )
v t
q
s
( )
v t
s
( )
v t
d
s
( )
t
v t
a
( )
v t
b
( )
v t
c
( )
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Vector không gian
PT nguồn 3 pha
Vector không gian dòng và áp stator
Viết biểu thức của V
s
???
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Pha a
(vector
dòng
hoặc áp)
Pha b
(vector
dòng
hoặc áp)
Pha c
3 Pha
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Vector dòng tổng
Tổng 2 vector (đỏ và xanh)
Tổng 3 vector
Hệ thống điều khiển số
Bộ môn Thiết bị điện
Qui đổi sang 2 pha