Giáo trình điều động tàu part 2 pps
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (382.88 KB, 16 trang )
13
nghi
ệ
m ta rút ra ch
ỉ
s
ố
ổ
n
đị
nh h
ướ
ng, n
ế
u ch
ỉ
s
ố
ổ
n
đị
nh h
ướ
ng E = 8 thì con tàu
đ
ó có tính
ổ
n
đị
nh
h
ướ
ng t
ố
t. N
ế
u E
<
7 thì
ổ
n
đị
nh h
ướ
ng kém nh
ư
ng tính quay tr
ở
t
ố
t.
Trong th
ự
c t
ế
, có th
ể
coi tàu có tính
ổ
n
đị
nh h
ướ
ng t
ố
t n
ế
u trong
đ
i
ề
u ki
ệ
n gió tác
độ
ng
không quá c
ấ
p 3(B) và s
ố
l
ầ
n b
ẻ
lái là không l
ớ
n h
ơ
n 4 l
ầ
n trong 1 phút, cùng v
ớ
i góc b
ẻ
lái kh
ỏ
i
m
ặ
t ph
ẳ
ng tr
ụ
c d
ọ
c không quá 2
độ
đế
n 3
độ
ở
m
ỗ
i m
ạ
n.
Ví d
ụ
: Tàu X có chi
ề
u dài 136,4m, khi th
ử
nghi
ệ
m
đặ
t giá tr
ị
góc lái
α
=
±
20
0
t
ố
c
độ
tàu V
t
= 14 h
ả
i lý/gi
ờ
= 7,2 m/giây, xác
đị
nh
đượ
c T
m
= 149,7 giây. V
ậ
y:
Độ
dài c
ủ
a m
ộ
t dao
độ
ng hoàn ch
ỉ
nh S
m
= 149,7 x 7,2 = 1.077,8m
Ch
ỉ
s
ố
ổ
n
đị
nh h
ướ
ng
89,7
4,136
8,1077
≈===
L
S
E
m
. Tức là con tàu này có tính ổn định trên
hướng đi tốt.
1.2.4.4. Tính năng quay trở:
Tính năng quay trở là sự phản ứng nhanh chóng của tàu với góc bẻ lái hay khả năng thay đổi
hướng chuyển động và di chuyển của nó theo quỹ đạo cong khi bánh lái lệch khỏi vị trí số không.
Các thông số chuyển động trên quỹ đạo này phụ thuộc vào những điều kiện ngoại cảnh ban đầu như
gió, nước, tốc độ và trạng thái của tàu
Các tàu ngày nay có thiết bị điều khiển chính là bánh lái, ngoài ra các tàu hiện đại còn trang
bị thêm các chân vịt mạn (Thrusters). Một số tàu chuyên dụng không những lấy bánh lái làm cơ
quan điều khiển mà nó còn có khả năng thay đổi hướng của lực đẩy theo yêu cầu.
Khi chạy trên hướng đi đã định, thường con tàu không thể tự động giữ hướng mà mũi luôn bị
đảo quanh hướng đi, đây chính là hiện tượng đảo lái (theo một chu kỳ nào đó). Cường độ đảo lái phụ
thuộc vào tác động của các ngoại lực như sóng, gió
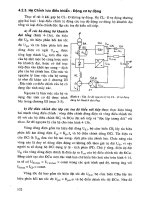
Trên hình 1.2 giả thiết rằng dưới tác dụng của lực này làm tàu lệch khỏi hướng đi đã định
một góc (α).
Gọi tổng lực cản tác dụng lên chuyển động của tàu là R (được đặt vào điểm O) và tổng các
ngoại lực tác dụng lên con tàu là P được đặt vào tâm trọng lực G. Cả hai trường hợp R và P đều
được phân tích ra hai thành phần theo trục dọc (x) và trục ngang (y) của tàu, được kí hiệu là P
x
, P
y
và R
x
, R
y
.
Rõ ràng, trong cả 2 trường hợp, các thành phần R
x
và P
x
không ảnh hưởng đến tính quay
trở của tàu. Còn các thành phần Ry và Py tạo thành một mô men lực có cánh tay đòn OG. Tuỳ thuộc
R
Px
R
P
HL
α
P
y
β
a
β
a
>
β
b
Điểm đặt G sau R
8
HL
α
P
y
β
b
R
Px
R
P
Điểm đặt G trước R
8
(a) (b)
R
Py
R
Py
P
P
x
P
x
P
O
O
G
G
R
R
y
R
x
R
x
R
y
R
Do ngẫu lực P
y
, R
y
Do ngẫu lực P
y
, R
y
Hình 1.2. Hiện tư ợng đảo lái
(a): Điểm đặt trọng tâm sau lực cản
(b) : Điểm đặt trọng tâm trước lực cản
14
điểm đặt của O và G mà mô men này có thể làm tăng đảo lái (a) và giảm đảo lái (b).
Trường hợp 1.2a, mô men do cặp ngẫu lực (P
y
, R
y
) gây ra cùng chiều với chiều lệch hướng của
tàu. Như vậy nó sẽ tăng thêm hiện tượng đảo lái.
Trường hợp 1.2b, mô men do cặp ngẫu lực (P
y
, R
y
) gây ra ngược chiều với chiều lệch hướng
của tàu. Như vậy nó sẽ làm giảm hiện tượng đảo lái, tàu ổn định trên hướng đi hơn nhưng tính năng
quay trở kém.
Bằng thực nghiệm người ta thấy rằng con tàu đạt tính năng điều động tốt nhất khi tâm điểm
của lực cản và tâm điểm của ngoại lực trùng hoặc gần trùng nhau (O ≡ G hoặc O nằm sau G một
chút). Do vậy khi tính toán xếp hàng, không nên để tàu chúi mũi (làm cho điểm O nằm về phía trước
so với điểm G) mà nên để chúi lái một ít.
Để đưa tàu về hướng đi ban đầu phải bẻ lái một góc lái
β
, rõ ràng ta phải bẻ lái ở trường
hợp a lớn hơn trường hợp b (hình 1.2
ba
ββ >
).
Ngày nay hầu hết các tàu đều trang bị hệ thống lái tự động với hai chức năng cơ bản là giữ
tàu ổn định trên hướng đi hay thay đổi hướng đi chuyển động theo một quy luật do yêu cầu của
người điều khiển.
1.3. Tính năng của bánh lái
1.3.1. Lực của bánh lái
Bánh lái là một thiết bị không thể thiếu được trong điều động tàu. Bánh lái giữ cho tàu
chuyển động trên hướng đi đã định hoặc thay đổi hướng của tàu theo ý muốn của người điều khiển.
Bánh lái được đặt phía sau chân vịt và nằm trong mặt phẳng trục dọc của tàu. Bánh lái có thể quay
đi một góc nhất định sang phải hoặc sang trái (khoảng từ -45
o
đến +45
o
) . Bánh lái có thể được chế
tạo bằng các nguyên liệu khác nhau, nhưng mỗi bánh lái đều có hai bộ phận cơ bản là trục lái và mặt
bánh lái.
Khi tàu chạy tới hoặc khi chạy lùi thì dòng nước chảy từ mũi về lái hoặc dòng nước chảy từ
lái về mũi sẽ tác dụng vào mặt trước hoặc mặt sau của bánh lái một áp lực P. Bằng thực nghiệm,
người ta xây dựng công thức để tính áp lực đó như sau:
2
1
sin305,0195,0
sin
VS
K
P ××
+
×
=
α
α
(1.10)
Trong đó:
α
: Góc bẻ lái (độ).
V: Vận tốc tàu (m/s).
S : Diện tích mặt bánh lái (m
2
).
K
1
: Hệ số của bánh lái phụ thuộc vào số chân vịt và được lấy như sau:
K
1
= 38 ÷ 42 (Kg/m
2
) với tàu 1 chân vịt.
K
1
= 20 ÷ 22,5 (Kg/m
2
) với tàu 2 chân vịt.
Lực cản phụ thuộc vào phần chìm của tàu, muốn có tác dụng tốt thì bánh lái phải có diện tích
tỉ lệ thích đáng với phần chìm của tàu, do đó diện tích mặt bánh lái phải được chọn theo tỉ lệ phù
hợp với con tàu. Người ta có thể tính diện tích mặt bánh lái dựa trên công thức:
2
K
TL
S
×
=
(1.11)
Trong đó :
L: Chiều dài của tàu (m).
T : mớn nước của tàu (m)
K
2
: Phụ thuộc loại tàu, thường K
2
= 50 ÷ 70.
1.3.2. Tác dụng của bánh lái khi tàu chạy tới
Khi tàu chuyển động thẳng đều thì nó chỉ chịu tác dụng của lực đẩy và lực cản. Khi bẻ bánh
lái 1 góc ọ nào đó, giả sử như hình 1.3 (bẻ lái sang phải). Lúc này do tác dụng của dòng chảy bao và
dòng do chân vịt tạo ra trên mặt của bánh lái nảy sinh sự phân bố lại áp lực, mặt bánh lái hướng tới
15
dòng chảy bao thì áp lực tăng, mặt kia giảm. Điểm đặt của tổng các lực P này gần về phía sống lái
và vuông góc với mặt bánh lái:
yx
PPP +=
(1.12)
Để hiểu rõ ảnh hưởng của lực sinh ra khi bẻ lái đi một góc, giả sử tại trọng tâm tàu G được
đặt một cặp lực
'&'
21
PP
, v
ề
độ
l
ớ
n thì .''
21 y
PPP == ; còn v
ề
chi
ề
u tác d
ụ
ng thì
''
21
PP ↑↓
. Rõ ràng,
c
ặ
p ng
ẫ
u l
ự
c
'
2
,PP
y
làm cho m
ũ
i tàu quay v
ề
phía b
ẻ
lái, l
ự
c P
1
’
làm tàu d
ạ
t ra ngoài vòng quay tr
ở
còn P
x
làm gi
ả
m chuy
ể
n
độ
ng t
ớ
i c
ủ
a tàu.
Th
ườ
ng thì
đ
i
ể
m
đặ
t c
ủ
a áp l
ự
c P và các l
ự
c thu
ỷ
độ
ng không cùng n
ằ
m trên m
ộ
t m
ặ
t ph
ẳ
ng
n
ằ
m ngang, nên khi quay tr
ở
, con tàu ngoài vi
ệ
c chuy
ể
n d
ị
ch ngang còn b
ị
nghiêng và chúi.
Tóm l
ạ
i, qu
ỹ
đạ
o chuy
ể
n
độ
ng c
ủ
a tàu do b
ẻ
lái là 1
đườ
ng cong do tr
ọ
ng tâm tàu v
ạ
ch ra.
1.3.3. Tác dụng của bánh lái khi chạy lùi
Gi
ả
s
ử
cho tàu ch
ạ
y lùi, khi tàu
đ
ã có tr
ớ
n lùi, ta b
ẻ
lái 1 góc
ọ
nào
đ
ó (hình 1.4 b
ẻ
lái sang
ph
ả
i). Lúc này do tác d
ụ
ng c
ủ
a dòng ch
ả
y bao và dòng do chân v
ị
t t
ạ
o ra trên m
ặ
t c
ủ
a bánh lái n
ả
y
sinh s
ự
phân b
ố
l
ạ
i áp l
ự
c, m
ặ
t bánh lái h
ướ
ng t
ớ
i dòng ch
ả
y bao thì áp l
ự
c t
ă
ng, m
ặ
t kia gi
ả
m.
Đ
i
ể
m
đặ
t c
ủ
a t
ổ
ng các l
ự
c P này g
ầ
n v
ề
phía s
ố
ng lái và vuông góc v
ớ
i m
ặ
t bánh lái:
yx
PPP +=
(1.13)
Để
hi
ể
u rõ
ả
nh h
ưở
ng c
ủ
a l
ự
c sinh ra khi b
ẻ
lái
đ
i m
ộ
t góc, t
ươ
ng t
ự
nh
ư
khi ch
ạ
y t
ớ
i, t
ạ
i
tr
ọ
ng tâm tàu G
đặ
t m
ộ
t c
ặ
p l
ự
c
'&'
21
PP
. V
ề
độ
l
ớ
n thì .''
21 y
PPP
==
Còn v
ề
chi
ề
u tác d
ụ
ng thì
''
21
PP ↑↓
. Rõ ràng, c
ặ
p ng
ẫ
u l
ự
c
'
1
,PP
y
làm cho m
ũ
i tàu quay ng
ượ
c v
ề
phía b
ẻ
lái, l
ự
c P
2
’
làm tàu
d
ạ
t ra ngoài vòng quay tr
ở
còn P
x
làm gi
ả
m chuy
ể
n
độ
ng lùi c
ủ
a tàu.
Do
đ
i
ể
m
đặ
t c
ủ
a áp l
ự
c P và các l
ự
c thu
ỷ
độ
ng không cùng n
ằ
m trên m
ộ
t m
ặ
t ph
ẳ
ng n
ằ
m
ngang, nên khi quay tr
ở
, con tàu ngoài vi
ệ
c chuy
ể
n d
ị
ch ngang còn b
ị
nghiêng và chúi. Qu
ỹ
đạ
o
chuy
ể
n
độ
ng c
ủ
a tàu khi ch
ạ
y lùi và b
ẻ
lái là m
ộ
t
đườ
ng cong do tr
ọ
ng tâm tàu v
ạ
ch ra.
P
x
α
P'
1
v
Dòng n
ướ
c ch
ả
y t
ừ
lái v
ề
m
ũ
i
Dòng n
ướ
c ch
ả
y t
ừ
m
ũ
i v
ề
lái
P
y
P
P
x
α
O
1
ω
qt
P'
1
P'
2
v
Dòng n
ướ
c ch
ả
y t
ừ
m
ũ
i v
ề
lái
Hình 1.3. L
ự
c xu
ấ
t hi
ệ
n do b
ẻ
lái và tác d
ụ
ng c
ủ
a nó khi tàu ch
ạ
y t
ớ
i
16
1.3.4. ảnh hưởng hình dạng bánh lái đến lực bánh lái
1.3.4.1. Bánh lái th
ườ
ng:
Là lo
ạ
i bánh lái mà toàn b
ộ
di
ệ
n tích c
ủ
a m
ặ
t bánh lái
đượ
c
đặ
t sau tr
ụ
c cu
ố
ng lái (hình 1.5).
Khi cho m
ặ
t bánh lái l
ệ
ch kh
ỏ
i m
ặ
t ph
ẳ
ng tr
ụ
c d
ọ
c tàu 1 góc
ọ
, phát sinh ra m
ộ
t mô-men quay tác
d
ụ
ng lên tr
ụ
c bánh lái là:
M
q
= Pxb (1.14)
Trong
đ
ó:
P : L
ự
c tác d
ụ
ng lên m
ặ
t bánh lái .
b : Kho
ả
ng cách t
ừ
đ
i
ể
m
đặ
t l
ự
c tác d
ụ
ng P t
ớ
i tr
ụ
c cu
ố
ng lái (m).
Giá tr
ị
b
đượ
c tính nh
ư
sau: b = (0,2 + 0,3sin
α
)x l (1.15)
l : Chi
ề
u r
ộ
ng c
ủ
a bánh lái (m)
ọ : Góc bẻ lái (độ).
Bánh lái th
ườ
ng ph
ả
i ch
ị
u m
ộ
t mô men xo
ắ
n r
ấ
t l
ớ
n khi làm vi
ệ
c. Trên các tàu l
ớ
n hi
ệ
n nay,
bánh lái n
ặ
ng hàng ch
ụ
c t
ấ
n, t
ố
c
độ
tàu l
ạ
i l
ớ
n, do
đ
ó ph
ả
i t
ạ
o ra m
ộ
t l
ự
c b
ẻ
lái r
ấ
t l
ớ
n.
Để
b
ẻ
lái ph
ả
i
thông qua h
ệ
th
ố
ng
đ
i
ệ
n ho
ặ
c
đ
i
ệ
n thu
ỷ
l
ự
c.
Bánh lái lo
ạ
i này có tính
ă
n lái t
ố
t, nh
ư
ng c
ồ
ng k
ề
nh, do tr
ụ
c lái ch
ị
u mô men xo
ắ
n l
ớ
n nên ít
trang b
ị
trên các tàu bi
ể
n có t
ố
c
độ
cao mà ch
ủ
y
ế
u trang b
ị
trên các lo
ạ
i tàu bi
ể
n nh
ỏ
, t
ố
c
độ
ch
ậ
m
và các xà lan, các xu
ồ
ng.
1.3.4.2. Bánh lái bù tr
ừ
:
Bánh lái bù tr
ừ
là lo
ạ
i bánh lái mà m
ặ
t c
ủ
a t
ấ
m lái n
ằ
m c
ả
v
ề
hai phía tr
ụ
c bánh lái. Di
ệ
n tích
phía tr
ướ
c tr
ụ
c lái kho
ả
ng 15
÷
30% di
ệ
n tích toàn b
ộ
m
ặ
t lái (hình 16). Mô men quay (M
q
) sinh ra
khi bánh lái l
ệ
ch kh
ỏ
i m
ặ
t ph
ẳ
ng tr
ụ
c d
ọ
c m
ộ
t góc
ọ
đượ
c tính theo công th
ứ
c:
M
q
= P
1
b
1
- P
2
b
2
(1.16)
Trong
đ
ó:
P
1
và P
2
: L
ự
c tác d
ụ
ng lên m
ặ
t phía tr
ướ
c và m
ặ
t phía sau c
ủ
a bánh lái (Kg)
b
1
và b
2
: Kho
ả
ng cách t
ươ
ng
ứ
ng t
ừ
đ
i
ể
m
đặ
t các l
ự
c P
1
và P
2
(m)
đế
n tr
ụ
lái.
b
P
ọ
Hình 1.5. Bánh lái th
ườ
ng
Hình 1.6. Bánh lái bù tr
ừ
b
1
P
1
ọ
b
2
P
2
17
V
ớ
i k
ế
t c
ấ
u nh
ư
v
ậ
y, bánh lái bù tr
ừ
kh
ắ
c ph
ụ
c
đượ
c nh
ượ
c
đ
i
ể
m c
ủ
a bánh lái th
ườ
ng, mô
men xo
ắ
n gây nên
ở
tr
ụ
c lái gi
ả
m h
ơ
n so v
ớ
i bánh lái th
ườ
ng. Vì khi bánh lái làm vi
ệ
c thì c
ả
m
ặ
t
tr
ướ
c và m
ặ
t sau tr
ụ
c lái
đề
u ch
ị
u áp l
ự
c c
ủ
a n
ướ
c. Bánh lái bù tr
ừ
có tính
ă
n lái t
ố
t, b
ẻ
lái nh
ẹ
, d
ễ
đ
i
ề
u khi
ể
n. Th
ườ
ng dùng cho tàu bi
ể
n hi
ệ
n nay.
1.3.4.3. Bánh lái n
ử
a bù tr
ừ
:
Bánh lái n
ử
a bù tr
ừ
là lo
ạ
i bánh lái bù tr
ừ
nh
ư
ng ch
ỉ
bù tr
ừ
m
ộ
t n
ử
a phía d
ướ
i (hình 1.7). Do
đ
ó, ngoài nh
ữ
ng
ư
u
đ
i
ể
m c
ủ
a bánh lái bù tr
ừ
thì bánh lái n
ử
a bù tr
ừ
khi b
ẻ
lái s
ẽ
nh
ẹ
h
ơ
n. T
ă
ng l
ự
c
tác d
ụ
ng do dòng n
ướ
c c
ủ
a chân v
ị
t tác d
ụ
ng vào m
ặ
t bánh lái. Bánh lái này th
ườ
ng dùng cho tàu có
t
ố
c
độ
l
ớ
n.
1.3.5. Xác định góc bẻ lái
Trong công th
ứ
c tính áp l
ự
c c
ủ
a n
ướ
c tác d
ụ
ng vào m
ặ
t bánh lái, ta th
ấ
y góc b
ẻ
lái và áp l
ự
c
n
ướ
c không hoàn toàn t
ỉ
l
ệ
thu
ậ
n v
ớ
i nhau, không ph
ả
i góc b
ẻ
lái càng t
ă
ng thì áp l
ự
c P c
ủ
a n
ướ
c tác
d
ụ
ng vào bánh lái càng t
ă
ng. Vi
ệ
c phân tích áp l
ự
c P ra hai thành ph
ầ
n phân l
ự
c theo chi
ề
u d
ọ
c và
chi
ề
u ngang tàu cho th
ấ
y thành ph
ầ
n l
ự
c theo chi
ề
u d
ọ
c (P
x
) có xu h
ướ
ng làm gi
ả
m chuy
ể
n
độ
ng t
ớ
i
ho
ặ
c lùi c
ủ
a tàu. Thành ph
ầ
n l
ự
c theo chi
ề
u ngang (P
y
) có tác d
ụ
ng tích c
ự
c cho vi
ệ
c quay tr
ở
. Trong
k
ỹ
thu
ậ
t
đ
i
ề
u
độ
ng tàu, yêu c
ầ
u các y
ế
u t
ố
tác
độ
ng ph
ả
i làm cho con tàu
đ
i
ề
u khi
ể
n d
ễ
dàng, t
ố
c
độ
đả
m b
ả
o. Do
đ
ó, c
ầ
n ph
ả
i s
ử
d
ụ
ng góc lái h
ợ
p lý
để
t
ă
ng giá tr
ị
c
ủ
a l
ự
c ngang P
y
,
đồ
ng th
ờ
i ph
ả
i
gi
ả
m giá tr
ị
l
ự
c theo chi
ề
u d
ọ
c t
ớ
i m
ứ
c th
ấ
p nh
ấ
t.
Để
xác
đị
nh giá tr
ị
góc b
ẻ
lái thích h
ợ
p ta phân tích ba tr
ườ
ng h
ợ
p góc b
ẻ
lái,
đ
ó là góc b
ẻ
lái
15
0
; 45
0
và 75
0
. Trong c
ả
ba tr
ườ
ng h
ợ
p gi
ả
s
ử
các
đ
i
ề
u ki
ệ
n tác
độ
ng bên ngoài nh
ư
nhau và t
ố
c
độ
tàu không thay
đổ
i (hình 1.8).
Phân tích l
ự
c tác d
ụ
ng lên bánh lái
ở
c
ả
ba tr
ườ
ng h
ợ
p ta th
ấ
y r
ằ
ng:
ở
góc b
ẻ
lái
ọ
=15
0
: l
ự
c c
ả
n chuy
ể
n
độ
ng t
ớ
i P
x
nh
ỏ
, m
ứ
c
độ
ả
nh h
ưở
ng t
ớ
i t
ố
c
độ
tàu không
đ
áng k
ể
. Thành ph
ầ
n l
ự
c P
y
c
ũ
ng không l
ớ
n nên tàu quay tr
ở
ch
ậ
m.
Hình 1.7. Bánh lái n
ử
a bù tr
ừ
ọ = 15
0
ọ=75
0
ọ= 45
0
(a)
(c)
(b)
Hình 1.8. Giá tr
ị
góc lái
ở
ba tr
ườ
ng h
ợ
p: (a)
ọ
=15
0
; (b)
ọ
= 45
0
và (c)
ọ
= 75
0
Py
Py
Py
P
P
P
Px
Px
Px
18
ở
góc b
ẻ
lái
ọ
=45
0
: l
ự
c c
ả
n chuy
ể
n
độ
ng t
ớ
i P
x
c
ũ
ng l
ớ
n, nên
ả
nh h
ưở
ng t
ớ
i t
ố
c
độ
tàu.
Nh
ư
ng thành ph
ầ
n l
ự
c P
y
khá l
ớ
n nên tàu quay tr
ở
nhanh.
ở
góc b
ẻ
lái
ọ
=75
0
: l
ự
c c
ả
n chuy
ể
n
độ
ng t
ớ
i P
x
l
ớ
n h
ơ
n nhi
ề
u,
ả
nh h
ưở
ng t
ớ
i t
ố
c
độ
tàu r
ấ
t
l
ớ
n. Nh
ư
ng thành ph
ầ
n l
ự
c P
y
không l
ớ
n nên tàu quay tr
ở
c
ũ
ng không nhanh.
Qua phân tích ba góc lái trên, nh
ậ
n th
ấ
y góc b
ẻ
lái
ọ
=45
0
làm tàu quay tr
ở
nhanh nh
ấ
t,
nh
ư
ng v
ẫ
n ch
ư
a t
ố
t vì t
ố
c
độ
tàu b
ị
tác
độ
ng nhi
ề
u (gi
ả
m
đ
áng k
ể
). K
ế
t h
ợ
p gi
ữ
a lý thuy
ế
t và th
ự
c t
ế
,
ng
ườ
i ta th
ấ
y r
ằ
ng góc b
ẻ
lái t
ố
t nh
ấ
t cho các tàu nên t
ừ
30
÷
40
0
. Các tàu ngày nay th
ườ
ng
đượ
c
thi
ế
t k
ế
góc b
ẻ
lái sang hai bên t
ừ
0
÷
45
0
. Nh
ư
ng góc b
ẻ
lái t
ố
t nh
ấ
t nên s
ử
d
ụ
ng t
ừ
0
÷
35
0
.
1.4.chuy
ể
n
độ
ng quay tr
ở
c
ủ
a tàu
1.4.1. Định nghĩa và quá trình quay trở của tàu
Khi tàu
đ
ang chuy
ể
n
độ
ng, n
ế
u ta b
ẻ
lái v
ề
m
ộ
t bên m
ạ
n v
ớ
i m
ộ
t góc
độ
nào
đ
ó so v
ớ
i v
ị
trí
s
ố
không, con tàu s
ẽ
v
ẽ
lên m
ộ
t qu
ĩ
đạ
o cong,
đ
ó chính là vòng quay tr
ở
v
ớ
i bán kính xác
đị
nh. Giá
tr
ị
bán kính này ph
ụ
thu
ộ
c vào t
ố
c
độ
tàu và góc b
ẻ
lái.
Đị
nh ngh
ĩ
a:
Vòng quay tr
ở
c
ủ
a tàu là qu
ỹ
đạ
o chuy
ể
n
độ
ng c
ủ
a tr
ọ
ng tâm (G) c
ủ
a tàu khi ta b
ẻ
lái sang
m
ộ
t bên m
ạ
n v
ớ
i m
ộ
t góc lái
ọ
nh
ấ
t
đị
nh nào
đ
ó.
Khi chân v
ị
t quay trong n
ướ
c sinh ra m
ộ
t l
ự
c
đẩ
y làm tàu chuy
ể
n
độ
ng. N
ế
u b
ẻ
lái cho tàu
quay tr
ở
thì l
ự
c này v
ẫ
n t
ồ
n t
ạ
i và giá tr
ị
c
ủ
a nó
đượ
c xác
đị
nh theo công th
ứ
c:
V
N
U
dcv
9
=
(1.17)
Trong
đ
ó:
U
dcv
: L
ự
c
đẩ
y c
ủ
a chân v
ị
t.
N : Công su
ấ
t hi
ệ
u d
ụ
ng c
ủ
a máy.
V : T
ố
c
độ
tàu.
Khi b
ẻ
lái sang m
ộ
t bên thì dòng n
ướ
c ch
ả
y bao xung quanh v
ỏ
tàu và dòng n
ướ
c do chân v
ị
t
đẩ
y s
ẽ
tác d
ụ
ng vào m
ặ
t bánh lái, gây nên áp l
ự
c P làm tàu quay tr
ở
và gi
ả
m chuy
ể
n
độ
ng th
ẳ
ng c
ủ
a
tàu. M
ỗ
i góc lái khác nhau thì tr
ọ
ng tâm tàu v
ạ
ch nên các qu
ỹ
đạ
o khác nhau.
Góc lái
ọ
càng l
ớ
n qu
ỹ
đạ
o v
ạ
ch ra càng h
ẹ
p. V
ậ
n t
ố
c nh
ỏ
thì
đườ
ng kính vòng quay tr
ở
nh
ỏ
nh
ư
ng th
ờ
i gian quay tr
ở
t
ă
ng (xem hình 1.9).
Quá trình quay tr
ở
c
ủ
a tàu:
Giai
đ
o
ạ
n 1: Còn g
ọ
i là giai
đ
o
ạ
n , là th
ờ
i gian c
ầ
n thi
ế
t b
ẻ
bánh lái t
ừ
s
ố
không (0
0
)
đế
n góc lái
ọ
0
nào
đ
ó. T
ứ
c là t
ừ
khi b
ắ
t
đầ
u b
ẻ
lái cho
đế
n khi b
ẻ
lái xong. Trung bình, giai
đ
o
ạ
n này kéo dài t
ừ
10
÷
15
giây.
ở
giai
đ
o
ạ
n này b
ắ
t
đầ
u xu
ấ
t hi
ệ
n và phát tri
ể
n thành ph
ầ
n thu
ỷ
độ
ng h
ọ
c tác d
ụ
ng lên
ọ=
o
o
o
10
517
35
Hình 1.9. Các góc lái khác nhau và qu
ĩ
đạ
o quay tr
ở
t
ươ
ng
ứ
ng
Sy
ọ=10
o
ọ=17
o
5
ọ=35
o
Sx
19
bánh lái, hay còn g
ọ
i là áp l
ự
c c
ủ
a n
ướ
c. áp l
ự
c này ban
đầ
u không cân b
ằ
ng v
ớ
i áp l
ự
c c
ủ
a n
ướ
c tác
độ
ng vào ph
ầ
n tr
ướ
c c
ủ
a thân v
ỏ
tàu bên m
ạ
n cùng v
ớ
i h
ướ
ng b
ẻ
lai. Lúc
đ
ó tàu v
ừ
a chuy
ể
n
độ
ng
ti
ế
n lên, v
ừ
a d
ị
ch chuy
ể
n ng
ượ
c v
ớ
i phía b
ẻ
lái và nghiêng v
ề
phía b
ẻ
lái m
ộ
t góc kho
ả
ng 2
÷
3
o
. S
ự
d
ị
ch chuy
ể
n này s
ẽ
gi
ả
m d
ầ
n và m
ấ
t h
ẳ
n khi b
ắ
t
đầ
u xu
ấ
t hi
ệ
n góc quay, lúc này tàu có xu h
ướ
ng
ng
ả
m
ũ
i v
ề
phía b
ẻ
lái. Giai
đ
o
ạ
n này còn g
ọ
i là giai
đ
o
ạ
n ch
ế
t vì tàu ch
ư
a nghe lái.
Giai
đ
o
ạ
n 2: Còn g
ọ
i là giai
đ
o
ạ
n ti
ế
n tri
ể
n, tính t
ừ
khi b
ẻ
lái xong cho
đế
n khi tàu b
ắ
t
đầ
u có s
ự
chuy
ể
n
độ
ng tròn
đề
u, lúc n
ằ
y v
ậ
n t
ố
c góc quay tr
ở
đạ
t giá tr
ị
c
ố
đị
nh (tàu
đ
ã quay
đượ
c 90
÷
100
o
),
lúc này l
ự
c c
ả
n
đ
ã cân b
ằ
ng.
ở
giai
đ
o
ạ
n này xu
ấ
t hi
ệ
n góc nghiêng ngang
ố
cùng h
ướ
ng v
ớ
i m
ạ
n b
ẻ
lái.
Giai
đ
o
ạ
n 3: G
ọ
i là giai
đ
o
ạ
n l
ượ
n
ổ
n
đị
nh hay là giai
đ
o
ạ
n quay tr
ở
ổ
n
đị
nh: t
ừ
lúc v
ậ
n t
ố
c góc
b
ằ
ng h
ằ
ng s
ố
, n
ế
u không thay
đổ
i góc b
ẻ
lái, không
ả
nh h
ưở
ng môi tr
ườ
ng bên ngoài.
Vòng quay tr
ở
c
ủ
a tàu
đượ
c bi
ể
u di
ễ
n nh
ư
hình. 1.11.
1.4.2. Các yếu tố của vòng quay trở
1.4.2.1.
Đườ
ng kính quay tr
ở
và
đườ
ng kính l
ớ
n nh
ấ
t c
ủ
a vòng quay tr
ở
:
Đườ
ng kính vòng quay tr
ở
(ký hi
ệ
u D
n
):
Đườ
ng kính vòng quay tr
ở
là
đườ
ng kính c
ủ
a vòng tròn do tr
ọ
ng tâm tàu v
ạ
ch ra sau khi tàu
quay tr
ở
v
ớ
i m
ộ
t góc b
ẻ
lái nh
ấ
t
đị
nh, th
ườ
ng là góc lái t
ố
i
đ
a (g
ọ
i là
đườ
ng kính vòng quay tr
ở
ổ
n
đị
nh),. B
ằ
ng th
ự
c nghi
ệ
m thì:
D
n
=
S
TL
10
2
×
(1.13)
Trong
đ
ó:
L: Chi
ề
u dài tàu (m).
Pivot Point Track
Bow Track
Point of Gravity Track
Stern Track
Turning Radius
Pivot Point
Point of Gravity
Turning center
β
=Drift Angle
β
Hình 1.10. Con tàu khi quay tr
ở
20
T: M
ớ
n n
ướ
c c
ủ
a tàu (m).
S : Di
ệ
n tích bánh lái (m
2
).
Chúng ta có th
ể
xác
đị
nh
đườ
ng kính vòng quay tr
ở
theo chi
ề
u dài tàu, ho
ặ
c d
ự
a vào h
ệ
s
ố
kinh nghi
ệ
m cho t
ừ
ng lo
ạ
i tàu và th
ự
c t
ế
. Nó bi
ể
u th
ị
tính n
ă
ng quay tr
ở
c
ủ
a tàu.
Đườ
ng kính l
ớ
n nh
ấ
t c
ủ
a vòng quay tr
ở
(ký hi
ệ
u D
max
):
Đườ
ng kính l
ớ
n nh
ấ
t c
ủ
a vòng quay tr
ở
là kho
ả
ng cách di chuy
ể
n theo chi
ề
u ngang tính t
ừ
tr
ọ
ng tâm tàu lúc b
ẻ
lái
đế
n khi con tàu
đ
ã quay
đượ
c 180
o
. Th
ự
c nghi
ệ
m cho th
ấ
y D
max
> D
n
. Nó
bi
ể
u th
ị
kh
ả
n
ă
ng tránh va v
ề
phía m
ạ
n quay tr
ở
theo chi
ề
u ngang.
Theo qui
đị
nh c
ủ
a IMO
“
IMO A 751(18)
”
, tàu
đ
óng sau 01/07/1994 thì D
max
≤
5L.
Hình 1.11. Vòng quay tr
ở
c
ủ
a tàu
1.4.2.2. Nghiêng ngang khi quay tr
ở
:
Gi
ả
s
ử
con tàu
đượ
c b
ẻ
lái quay ph
ả
i nh
ư
hình 1.12, tàu chuy
ể
n
độ
ng quay v
ớ
i t
ố
c
độ
góc
ω
.
G
ọ
i F
lt
là l
ự
c li tâm, l
ự
c li tâm này
đượ
c
đặ
t vào tr
ọ
ng tâm G c
ủ
a tàu và
đẩ
y con tàu ra xa vòng quay,
R là l
ự
c c
ả
n tác d
ụ
ng vào ph
ầ
n chìm c
ủ
a tàu, P là áp l
ự
c n
ướ
c tác
độ
ng lên m
ặ
t bánh lái. Giá tr
ị
góc
nghiêng ngang
ố
ph
ụ
thu
ộ
c góc b
ẻ
lái
ọ
và t
ố
c
độ
c
ủ
a tàu - V.
Ta bi
ế
t r
ằ
ng lúc
đầ
u góc
ố
= 2
÷
3
o
v
ề
phía b
ẻ
lái, khi quán tính còn nh
ỏ
. Giá tr
ị
này có xu
h
ướ
ng t
ă
ng, sau
đ
ó theo s
ự
t
ă
ng lên c
ủ
a l
ự
c quán tính
đặ
t vào tr
ọ
ng tâm tàu làm cho tàu cân b
ằ
ng,
đ
i
ề
u này s
ẽ
làm cho tàu nghiêng ngang v
ề
phía ngoài vòng quay tr
ở
. L
ự
c quán tính gây nghiêng
ngang khi quay tr
ở
đượ
c g
ọ
i là l
ự
c nghiêng ngang
độ
ng, th
ự
c t
ế
góc nghiêng ngang
độ
ng có th
ể
đạ
t
đế
n giá tr
ị
khá l
ớ
n. Tàu s
ẽ
ti
ế
p t
ụ
c chuy
ể
n
độ
ng trên vòng quay tr
ở
, lúc vòng quay tr
ở
ổ
n
đị
nh thì
ố
gi
ả
m xu
ố
ng và
đạ
t m
ộ
t giá tr
ị
ổ
n
đị
nh nào
đ
ó, giá tr
ị
góc nghiêng này là hàm s
ố
c
ủ
a t
ố
c
độ
quay tr
ở
(
ố
= f (
ω
)). L
ự
c li tâm F
lt
làm cho t
ầ
u có xu h
ướ
ng b
ị
đẩ
y tr
ọ
ng tâm tàu ra xa tâm vòng quay tr
ở
.
TRANSFER
G
B
R
F
lt
ω
ố
L
0
L
1
W
1
W
0
TACTICAL
DIAMETER
9 KTS
12 KTS
8 KTS
DRIFT
ANGLE
TOTAL ADVANCE
ADVANCE
D
n
21
T
ừ
công th
ứ
c tính l
ự
c li tâm :
F
lt
=
r
Vm
2
×
(1.14).
G
ọ
i mô men h
ồ
i ph
ụ
c c
ủ
a tàu là M
n
, giá tr
ị
M
n
đượ
c tính theo công th
ứ
c :
M
n
= Dxhxsin
ố
.
Hay M
n
= Dhsin
ố
= )
2
(
2
d
Z
rg
Vgm
G
−
×
⋅⋅
cosố
=> tgố =
θθθ ≈=>−
×××
⋅⋅
tg nhá)
2
(
2
d
Z
grhD
Vgm
G
=>
ố
max
o
= 1,4 )
2
(
2
d
Z
Lh
V
G
−
×
(1.15) (công th
ứ
c G.A Fzirso)
Ho
ặ
c công th
ứ
c th
ự
c nghi
ệ
m:
h
r
bV
×
×
=
2
0
max
54,1θ
(1.16)
Trong
đ
ó :
M : Kh
ố
i l
ượ
ng c
ả
con tàu.
D : L
ượ
ng r
ẽ
n
ướ
c c
ủ
a tàu.
g : Gia t
ố
c tr
ọ
ng tr
ườ
ng (9,81m/giây
2
).
V: T
ố
c
độ
tàu (m/giây).
F
lt
: L
ự
c li tâm.
ố
: Góc nghiêng ngang khi quay tr
ở
.
r: Bán kính quay tr
ở
.
h: Chi
ề
u cao th
ế
v
ữ
ng ban
đầ
u.
d: M
ớ
n n
ướ
c trung bình c
ủ
a tàu.
Z
G
: Cao
độ
tr
ọ
ng tâm tàu.
b : Kho
ả
ng cách gi
ữ
a tr
ọ
ng tâm G và tâm n
ổ
i B c
ủ
a tàu.
Nhìn vào công th
ứ
c 1.15 và 1.16 ta th
ấ
y góc nghiêng ngang t
ố
i
đ
a khi quay tr
ở
t
ỉ
l
ệ
thu
ậ
n v
ớ
i
bình ph
ươ
ng t
ố
c
độ
và t
ỉ
l
ệ
ngh
ị
ch v
ớ
i chi
ề
u cao th
ế
v
ữ
ng ban
đầ
u.
Đ
i
ề
u này cho th
ấ
y khi quay tr
ở
v
ớ
i v
ậ
n t
ố
c l
ớ
n d
ễ
b
ị
l
ậ
t tàu, nh
ấ
t là tàu có chi
ề
u cao th
ế
v
ữ
ng nh
ỏ
nh
ư
tàu ch
ở
container, tàu ch
ở
g
ỗ
Đ
i
ề
u này c
ầ
n
đặ
c bi
ệ
t quan tâm khi quay tr
ở
tàu trong
đ
i
ề
u ki
ệ
n sóng gió. N
ế
u tàu có góc nghiêng
ban
đầ
u (
ố
o
) thì nó
ả
nh h
ưở
ng
đế
n góc nghiêng ngang t
ố
i
đ
a trên vòng quay tr
ở
. Tu
ỳ
thu
ộ
c bên quay
tr
ở
mà
đườ
ng kính quay tr
ở
có th
ể
gi
ả
m ho
ặ
c t
ă
ng (tàu ch
ở
g
ỗ
tr
ướ
c kia th
ườ
ng có
ố
o
ban
đầ
u).
Tàu hàng khô theo quy
đị
nh góc nghiêng ngang ban
đầ
u do quay tr
ở
ố
≤
12
o
, tàu khách và
quân s
ự
ố
≤
17
o
.
ố
4
8
12
16
Khi
ố
0
ổ
n
đị
nh
ố
đ
22
1.4.2.3. Kho
ả
ng d
ị
ch chuy
ể
n theo chi
ề
u ngang - Transfer (kí hi
ệ
u Tr):
Kho
ả
ng d
ị
ch chuy
ể
n theo chi
ề
u ngang là kho
ả
ng cách tính t
ừ
tr
ọ
ng tâm tàu khi nó
đ
ã quay
đượ
c 90
o
đế
n h
ướ
ng ban
đầ
u theo chi
ề
u ngang. Th
ự
c nghi
ệ
m cho th
ấ
y giá tr
ị
Tr = (0,25
÷
0,5)D
n
, Tr
bi
ể
u th
ị
kh
ả
n
ă
ng tránh va theo chi
ề
u ngang, kh
ả
n
ă
ng tàu chuy
ể
n h
ướ
ng sang h
ướ
ng m
ớ
i, giúp ta
tránh va ch
ướ
ng ng
ạ
i theo phía tr
ướ
c ho
ặ
c tính toán quãng
đườ
ng
để
chuy
ể
n sang h
ướ
ng m
ớ
i.
1.4.2.4. Kho
ả
ng d
ị
ch chuy
ể
n theo chi
ề
u d
ọ
c
–
Advance (kí hi
ệ
u A
d
) :
Kho
ả
ng cách tính t
ừ
tr
ọ
ng tâm tàu t
ạ
i v
ị
chí khi b
ắ
t
đầ
u b
ẻ
lái
đế
n khi quay
đượ
c 90
o
theo
chi
ề
u d
ọ
c tính trên h
ướ
ng chuy
ể
n d
ị
ch, g
ọ
i là kho
ả
ng d
ị
ch chuy
ể
n d
ọ
c. B
ằ
ng th
ự
c nghi
ệ
m cho th
ấ
y
giá tr
ị
A
d
= (0,6
÷
1,2)D
n
.
Kho
ả
ng d
ị
ch chuy
ể
n theo chi
ề
u d
ọ
c cho ta kh
ả
n
ă
ng tránh va theo chi
ề
u d
ọ
c, ngoài ra còn
cho phép tính kho
ả
ng cách và góc quay c
ầ
n thi
ế
t
để
đ
i vào h
ướ
ng m
ớ
i khi quay tr
ở
ở
đ
o
ạ
n cong,
khúc ngo
ặ
t, kênh lu
ồ
ng
Theo qui
đị
nh c
ủ
a IMO
“
IMO A 751(18)
”
, tàu
đ
óng sau 01/07/1994 thì A
d
≤
4,5 L.
1.4.2.5. Kho
ả
ng d
ị
ch chuy
ể
n ng
ượ
c :
Đ
o
ạ
n d
ị
ch chuy
ể
n tính t
ừ
tr
ọ
ng tâm tàu theo chi
ề
u ngang ng
ượ
c v
ớ
i h
ướ
ng b
ẻ
lái g
ọ
i là
kho
ả
ng d
ị
ch chuy
ể
n ng
ượ
c. B
ằ
ng th
ự
c nghi
ệ
m c
ũ
ng cho th
ấ
y kho
ả
ng d
ị
ch chuy
ể
n ng
ượ
c = (0,05
÷
0,1)D
n
hay
≤
2
B
.
Kho
ả
ng d
ị
ch chuy
ể
n ng
ượ
c bi
ể
u th
ị
kh
ả
n
ă
ng tránh va theo phía ng
ượ
c v
ớ
i phía quay tr
ở
.
1.4.2.6. Góc d
ạ
t và tính n
ă
ng quay tr
ở
:
Góc d
ạ
t
β
là góc gi
ữ
a m
ặ
t ph
ẳ
ng tr
ụ
c d
ọ
c tàu và
đườ
ng th
ẳ
ng ti
ế
p tuy
ế
n v
ớ
i vòng quay tr
ở
đ
i
qua tr
ọ
ng tâm t
ầ
u. Th
ườ
ng
β
= 10
÷
15
o
,
β
càng l
ớ
n th
ể
hi
ệ
n tính n
ă
ng quay tr
ở
c
ủ
a con t
ầ
u càng
cao. Góc
β
xu
ấ
t hi
ệ
n khi tàu b
ẻ
lái xong và luôn
ở
m
ạ
n phía ngoài vòng quay tr
ở
.
1.4.2.7. V
ậ
n t
ố
c và th
ờ
i gian quay tr
ở
:
V
ậ
n t
ố
c dài trên vòng quay tr
ở
coi nh
ư
v
ậ
n t
ố
c dài c
ủ
a tr
ọ
ng tâm tàu, V dài
ở
các
đ
i
ể
m khác
nhau thì khác nhau. Th
ờ
i gian c
ủ
a m
ộ
t chu k
ỳ
quay tr
ở
là T
qtrở
. Quãng đường của 1 chu kỳ quay trở
được tính như sau:
quaytroquaytroquaytro
vTS ×=
'
360
1.4.2.8. Tốc độ bị giảm khi quay trở :
Qua việc thử nghiệm thấy rằng 1 con tàu chở dầu loại rất lớn VLCC “Very Large Cruide
Carrier” mất trớn tới từ 25 ÷30% mỗi lần đổi hướng 9
0
. Nếu đang chạy với tốc độ 12 hải lý/giờ, khi
kết thúc 1 vòng quay tốc độ chỉ còn 2÷3 hải lý/giờ (giả sử bẻ lái hết về một bên). Hình 1.14 miêu tả
một con tàu khi bẻ hết lái để quay trở, tốc độ ban đầu khi tiến hành bẻ lái quay là 12 hải lý/giờ, sau
khi quay được 90 độ tốc độ giảm còn 6,5 hải lý/giờ và khi quay được 180
0
tốc độ chỉ còn 4,5 hải
lý/giờ.
Thay đổi hướng 180
0
.Tốc độ = 4,2 nơ. Thời
gian trôi qua: 9 phút 20 giây
Thay đổi hướng 90
0
. Tốc độ = 6,5 nơ.
Thời gian: 4 phút 30 giây
Chiều dài tàu
Tổng thời gian mất 21 phút 5 giây
23
1.4.3. Tâm quay và vị trí của nó
1.4.3.1. Khái niệm, định nghĩa về tâm quay:
Khi con tàu quay trở, nó sẽ quay xung quanh một điểm nằm trên trục dọc của tàu, điểm đó
được gọi là tâm quay (Pivot point). Khi tàu chuyển động tới, tâm quay nằm ở khoảng 1/4 chiều dài
tàu tính từ mũi, còn khi lùi tâm quay nằm ở 1/4 chiều dài tàu tính từ lái.
1.4.3.2. Các yếu tố ảnh hưởng đến tâm quay và lưu ý trong điều động:
Tốc độ chuyển động của tàu: khi tàu bắt đầu chuyển động tâm quay ở vào khoảng 1/3 chiều
dài của tàu tính từ mũi hoặc lái (tới hoặc lùi), khi tốc độ tàu đã ổn định tâm quay sẽ ở vào
khoảng 1/4 chiều dài của tầu tính từ mũi hoặc lái.
Khi chúi đuôi: Tâm quay có su hướng dịch chuyển về phía giữa tàu
Khi chúi mũi: Tâm quay chuyển dịch về phía trước
1.4.4. Các yếu tố ảnh hưởng đến quay trở và đánh giá tính năng điều động từ độ lớn vòng quay
trở
Các yếu tố ảnh hưởng đến quay trở:
- ảnh hưởng của nông cạn:
Gọi H là độ sâu nơi quay trở và T là mớn nước của tàu lúc quay trở, người ta thấy rằng khi tỉ
số H/T < 2,5 bắt đầu có ảnh hưởng của nông cạn. Qua thực nghiệm cho thấy đường kính vòng quay
trở tăng lên. Tàu quay nhanh hơn nước sâu vì trong lúc quay tốc độ tàu giảm không nhanh như ở
nước sâu (hình 1.15).
- ảnh hưởng của chiều quay chân vị t:
Với tàu chân vịt chiều phải, bán kính quay trở khi quay sang trái sẽ nhỏ hơn khi quay sang
phải do tác động của thành phần lực đẩy ngang. Tuy nhiên, độ chênh lệch này rất nhỏ.
- ảnh hưởng của mớn nước:
Khi tàu xếp đầy hàng đường kính vòng quay trở sẽ lớn hơn so với không hàng khi quay cùng
tốc độ và cùng điều kiện ngoại cảnh.
- ảnh hưởng do chúi: Nếu chúi mũi, đường kính quay trở nhỏ hơn chúi lái nhưng tốc độ quay
chậm hơn so với chúi lái.
- ảnh hưởng do nghiêng: Tàu dễ quay về phía mạn cao và vòng quay trở về phía mạn đó sẽ
nhỏ hơn khi quay về phía mạn thấp.
s
Nước nông
Độ sâu trung bình
Nước sâu
24
Đánh giá tính năng điều động tàu từ độ lớn vòng quay trở:
Tính năng quay trở là một trong những tính năng điều động tàu quan trọng mà người điều
khiển cần phải nắm được. Vòng quay trở của một con tàu càng nhỏ thể hiện tính năng quay trở càng
tốt.
1.4.5. Xác định vòng quay trở của tàu
1.4.5.1. Sử dụng Radar với 1 phao hoặc mục tiêu cố định (đo phương vị và khoảng cách tới 1 mục
tiêu):
-Cơ sở của phương pháp: Từ một vị trí được chọn để xác định vòng quay trở, bẻ hết lái
về một bên, liên tục đo phương vị và khoảng cách tới mục tiêu. Từ mục tiêu thao tác phương vị
nghịch. Tập hợp các vị trí quan sát (phương vị và khoảng cách cho ta vị trí tàu).
-Cách xác định thông số: Khi bắt đầu cho tàu chạy, bẻ bánh lái sang 1 bên tối đa và giữ
nguyên góc bẻ lái. Cứ khoảng 10 giây đọc số liệu phương vị và khoảng tới mục tiêu đã chọn, sau đó
ghi vào bảng sau:
Stt Phương vị (độ) Khoảng cách (hải lý) Phương vị nghịch (độ)
01
02
… … … …
40
-Cách vẽ:
Trên trục thẳng đứng trùng với hướng 000
0
, lấy vị trí ban đầu của tàu. Từ vị trí đó kẻ các
phương vị, trên đó lấy độ dài bằng khoảng cách từ vị trí ban đầu của tàu đến mục tiêu. Xác định các
vị trí tiếp theo trên cơ sở của phương pháp, nối các vị trí lại với nhau cho ta vòng quay trở.
1.4.5.2. Phương pháp hướng và tốc độ:
-Cơ sở của phương pháp:
Với 2 thông số hướng và tốc độ của tàu đã đo được, ta xác định trên mỗi hướng cụ thể, trong
vòng 10 giây tàu ta đi được quãng đường là:
Với 2 thông số hướng và quãng đường tàu đi được trong 10 giây trên hướng đi đó, ta sẽ xác
định được quĩ đạo vị trí tàu, tập hợp các vị trí đó cho ta vòng quay trở cuả tàu.
-Xác định thông số:
Cho tàu chạy, bẻ bánh lái hết về một bên và giữ nguyên góc lái đó. Cứ 10 giây một lần ghi
lại hướng và tốc độ tàu. Khi tàu quay được 360
0
so với hướng ban đầu thì thôi. Các thông số ghi
chép vào bảng sau:
Stt Hướng (độ) Tốc độ (hải lý/giờ) Khoảng cách (mét)
01
02
…
T
ốc độ t
àu X 1852
T
ốc độ t
àu X 1852
X 10
=
3600
360
25
40
… … …
-Cách vẽ:
Đối số hướng và khoảng cách, chọn 1 trục thẳng đứng trùng với hướng 000
0
, lấy gốc tọa độ
(O) là vị trí tàu lúc bắt đầu bẻ lái. Từ điểm O kẻ hướng C
1
và xác định quãng đường tàu đi được
trong 10 giây trên hướng C
1
, tìm được điểm A
1
, cứ lần lượt như vậy ta được các điểm A
2
,…A
n
, nối
lại cho ta vòng quay trở của tàu (thường khoảng 40 điểm).
1.4.5.3. Sử dụng GPS:
-Cơ sở của phương pháp:
Cơ sở chuyển vị trí tàu từ mặt cầu sang mặt phẳng (tọa độ Đề các) (do việc ta không thể trực
tiếp chấm các điểm vị trí từ GPS lên hải đồ mà phải vẽ trên 1 tờ giấy).
Từ tọa độ (ϕ, λ) trong bảng ta thể hiện vị trí tàu trên tọa độ Đề các (Oxy) theo công thức:
Y
i
= ∆ϕ
i
X 1852 (m)
∆ϕ
i
= ϕ
i
- ϕ
1
X
i
= ∆λ
i
X 1852 X Cosϕ
i
(m)
∆λ
i
= λ
i
- λ
1
Thể hiện từng cặp tọa độ (X
i
, Y
i
) tương ứng trên hệ tọa độ Đề các cho vị trí tàu, tập hợp các
vị trí tàu này cho ta vòng quay trở.
- Xác định các thông số:
Khi bắt đầu cho tàu chạy, người bẻ lái đồng thời bẻ lái sang phải (hoặc trái) với góc bẻ lái tối
đa và giữ nguyên bánh lái ở góc bẻ lái đó. Cứ sau khoảng 10 giây ghi lại tọa độ (ϕ
i
, λ
i
) của tàu 1 lần.
Ghi liên tục như vậy vào bảng dưới đây khi tàu quay được 360
0
so với hướng bẻ lái ban đầu thì thôi.
Stt
ϕ
i
(độ) λ
i
(độ) ∆ϕ
i
(%/phút) ∆λ
i
(%/phút)
X
i
(m) Y
i
(m)
01
02
… … … … … … …
40
-Cách vẽ:
Sau khi xác định được X
i
và Y
i
. Trên trục hoành Ox ta lấy hoành độ X
i
Trên trục tung Oy ta lấy tung độ Y
i
1.4.5.4. Các phương pháp khác:
- Sử dụng góc kẹp ngang
- Sử dụng vết ảnh tầu chuyển động trên màn hình RADAR.
1.4.5.5. Ví dụ minh hoạ cho vòng quay trở của 1 tàu hàng:
Các thông số : LOA=143,402m; Lpp=134,112m; Breadth=19,812m; Depth=12,344m; Full
Draft=9,054m; Full load Displacement= 19.126T; Máy chính MCR =5.130BHP X 500RPM.,
NOR=4.540 X 480RPM; Bridge to Bow = 113,5m; Bridge to stern=30m
turning circle
Full load Ballast
Advance Transfer Time Advance Transfer Time
Port 1,795ft 770ft 2m-05s 1,365ft 735ft 1m-54s
Full ah’d
10.9kts
Stb 1,630ft 830ft 2m-00s 1,345ft 630ft 1m-50s
Port 1,780ft 770ft 2m-21s 1,315ft 670ft 2m-15s
Half ah’d
9.6 kts
Stb 1,610ft 830ft 2m-15s 1,320ft 735ft 2m-09s
Warning:
The response of the above named vessel may be difference from that listed above if any of
the following conditions, upon which maneuvering information is based are varied
1. Calm weather-wind 10 knots or less, calm sea.
2. No current.
3. Water depth twice the vessel’s draft greater
26
4. Clean hull.
5. Intermediate draft or unusual trim.
1.5. Chân vịt và tác dụng của nó trong điều động tàu
1.5.1. Lực đẩy phát sinh khi chân vịt quay
1.5.1.1. Khái niệm:
Chân vịt là bộ phận cuối cùng chuyển công suất của máy thành lực đẩy cho tàu chuyển động
tới hoặc lùi. Mặt khác, chân vịt còn ảnh hưởng tới tính năng quay trở của tàu. Về vấn đề này, người
điều khiển tàu cần phải nắm vững để lợi dụng các ưu nhược điểm của nó trong quá trình điều động.
Chân vịt của tàu có 3, 4 hay nhiều cánh. Số lượng cánh nhiều hay ít không ảnh hưởng đến
tính năng quay trở, chân vịt nhiều cánh khi hoạt động sẽ giảm độ rung của tàu so với chân vịt ít
cánh.
Với tàu 1 chân vịt, thì chân vịt được đặt ở sau lái tàu, nằm trong mặt phẳng trục dọc và ở
trước bánh lái.
Pha của chân vịt hay còn gọi là bước của chân vịt đó là khoảng cách một điểm trên đầu của
cánh chân vịt tịnh tiến được khi chân vịt đó quay được một vòng trong thể đặc. Giá trị thực dụng của
bước chân vịt được tính theo công thức sau đây:
h
cc
c
N
VS
75
=η (1.17)
Trong
đ
ó:
S
c
: áp l
ự
c c
ủ
a chân v
ị
t
V
c
: T
ố
c
độ
chuy
ể
n
độ
ng c
ủ
a chân v
ị
t
N
h
: Công su
ấ
t h
ữ
u ích c
ủ
a máy.
Khi tàu ch
ạ
y t
ớ
i, n
ế
u
đứ
ng t
ừ
lái tàu nhìn v
ề
phía m
ũ
i mà th
ấ
y cánh chân v
ị
t quay theo chi
ề
u
thu
ậ
n chi
ề
u kim
đồ
ng h
ồ
thì
đượ
c g
ọ
i là chân v
ị
t chi
ề
u ph
ả
i. Chân v
ị
t chi
ề
u trái thì ng
ượ
c l
ạ
i, khi tàu
ch
ạ
y t
ớ
i, n
ế
u
đứ
ng t
ừ
lái tàu nhìn v
ề
phía m
ũ
i mà th
ấ
y cánh chân v
ị
t quay theo chi
ề
u ng
ượ
c chi
ề
u
kim
đồ
ng h
ồ
thì
đượ
c g
ọ
i là chân v
ị
t chi
ề
u trái (hình 1. 16).
1.5.1.2. L
ự
c
đẩ
y phát sinh khi chân v
ị
t quay:
Khi chân v
ị
t quay trong n
ướ
c dòng n
ướ
c sinh ra do thành ph
ầ
n phân l
ự
c ngang luôn bao
quanh bánh lái ngay c
ả
khi bánh lái n
ằ
m trong m
ặ
t ph
ẳ
ng tr
ụ
c d
ọ
c c
ủ
a tàu, ngh
ĩ
a là khi bánh lái
để
s
ố
không.
- Thành ph
ầ
n phân l
ự
c ngang C:
Để
th
ấ
y rõ
ả
nh h
ưở
ng c
ủ
a chi
ề
u quay chân v
ị
t t
ớ
i tính n
ă
ng quay tr
ở
ta ti
ế
n hành xét m
ộ
t
chân v
ị
t chi
ề
u ph
ả
i 4 cánh, v
ị
trí các cánh
đượ
c kí hi
ệ
u là I, II, III, IV và các phân l
ự
c ngang do các
cánh sinh ra
đượ
c kí hi
ệ
u là C
1
, C
2
,
C
3
,
C
4
t
ươ
ng
ứ
ng khi tàu ch
ạ
y t
ớ
i. (hình 1.17).
Cánh I
đẩ
y lu
ồ
ng n
ướ
c phía trên quay sang ngang và xu
ố
ng d
ướ
i, t
ạ
o ra phân l
ự
c ngang C
1
,
Tàu ch
ạ
y t
ớ
i - Chân v
ị
t chi
ề
u ph
ả
i Tàu ch
ạ
y t
ớ
i - Chân v
ị
t chi
ề
u trái
Hình 1.16. Chân v
ị
t chi
ề
u ph
ả
i và chân v
ị
t chi
ề
u trái
27
phân l
ự
c ngang C
1
có chi
ề
u t
ừ
trên xu
ố
ng d
ướ
i theo chi
ề
u th
ẳ
ng
đứ
ng nên không gây
ả
nh h
ưở
ng
đế
n
quay tr
ở
c
ủ
a tàu, ph
ả
n l
ự
c c
ủ
a n
ướ
c D
1
có chi
ề
u ng
ượ
c l
ạ
i, có tác d
ụ
ng nâng lái t
ầ
u lên.
Cánh II n
ằ
m
ở
bên ph
ả
i quay t
ừ
trên xu
ố
ng và sang ngang qu
ạ
t m
ộ
t lu
ồ
ng n
ướ
c t
ừ
ph
ả
i qua
trái, phân l
ự
c ngang C
2
tác d
ụ
ng tr
ự
c ti
ế
p vào ph
ầ
n d
ướ
i m
ặ
t bên ph
ả
i c
ủ
a bánh lái, làm cho lái tàu
d
ị
ch chuy
ể
n sang trái. Ph
ả
n l
ự
c n
ướ
c D
2
có tác d
ụ
ng làm cho lái tàu d
ị
ch chuy
ể
n v
ề
phía bên ph
ả
i.
Cánh III n
ằ
m
ở
phía d
ướ
i, quay t
ừ
d
ướ
i lên trên t
ạ
o ra phân l
ự
c ngang C
3
có chi
ề
u sang
ngang và lên trên. Phân l
ự
c ngang C
3
không
ả
nh h
ưở
ng gì
đế
n quay tr
ở
c
ủ
a tàu. Ph
ả
n l
ự
c c
ủ
a n
ứơ
c
D
2
có tác d
ụ
ng dìm lai tàu xu
ố
ng.
Cánh IV n
ằ
m
ở
bên trái qu
ạ
t m
ộ
t kh
ố
i n
ướ
c t
ừ
d
ướ
i lên trên v
ớ
i phân l
ự
c ngang C
4
đậ
p tr
ự
c
ti
ế
p vào m
ặ
t trên bên trái c
ủ
a bánh lái. Phân l
ự
c ngang C
4
có tác d
ụ
ng làm ph
ầ
n lái tàu ng
ả
sang
ph
ả
i, ph
ả
n l
ự
c n
ướ
c D
4
t
ươ
ng
ứ
ng có tác d
ụ
ng
đẩ
y lai tàu sang phía bên trái.
Qua phân tích trên th
ấ
y r
ằ
ng l
ự
c C
1
và C
3
không gây
ả
nh h
ưở
ng gì
đế
n quay tr
ở
mà ch
ỉ
có C
2
và C
4
m
ớ
i có tác d
ụ
ng. Hai l
ự
c này ng
ượ
c chi
ề
u nhau và có ph
ươ
ng vuông góc v
ớ
i m
ặ
t ph
ẳ
ng tr
ụ
c
d
ọ
c c
ủ
a tàu. Ta th
ấ
y cánh II làm vi
ệ
c sâu h
ơ
n cánh IV nên l
ự
c C
2
>
C
4
. N
ế
u g
ọ
i l
ự
c t
ổ
ng h
ợ
p c
ủ
a
chúng là C thì ta có th
ể
vi
ế
t C = C
2
- C
4
. Nh
ư
v
ậ
y t
ổ
ng h
ợ
p l
ự
c C cùng chi
ề
u v
ớ
i C
2
, làm cho lái tàu
chuy
ể
n d
ị
ch v
ề
phía bên trái.
C
ũ
ng qua phân tích trên ta th
ấ
y r
ằ
ng l
ự
c D
1
và D
3
không gây
ả
nh h
ưở
ng gì
đế
n quay tr
ở
mà
ch
ỉ
có D
2
và D
4
m
ớ
i có tác d
ụ
ng. Hai l
ự
c này ng
ượ
c chi
ề
u nhau và có
độ
l
ớ
n khác nhau. Ta th
ấ
y
cánh II làm vi
ệ
c sâu h
ơ
n cánh IV nên l
ự
c D
2
>
D
4
. N
ế
u g
ọ
i l
ự
c t
ổ
ng h
ợ
p c
ủ
a chúng là D thì ta có th
ể
vi
ế
t D = D
2
- D
4
. Nh
ư
v
ậ
y t
ổ
ng h
ợ
p l
ự
c D cùng chi
ề
u v
ớ
i D
2
làm cho lai tàu d
ị
ch chuy
ể
n v
ề
bên
ph
ả
i.
1.5.2.Các dòng nước sinh ra khi chân vịt quay
1.5.2.1. Dòng n
ướ
c ch
ả
y t
ừ
m
ũ
i v
ề
lái:
Khi chân v
ị
t quay
đẩ
y tàu chuy
ể
n
độ
ng t
ớ
i thì xu
ấ
t hi
ệ
n dòng n
ướ
c ch
ả
y t
ừ
m
ũ
i v
ề
lái, n
ế
u
bánh lái
để
s
ố
không thì áp l
ự
c c
ủ
a n
ướ
c tác d
ụ
ng cân b
ằ
ng trên 2 m
ặ
t bánh lái, vì v
ậ
y s
ẽ
không gây
ả
nh h
ưở
ng
đế
n quay tr
ở
c
ủ
a tàu mà ch
ỉ
làm cho tàu luôn chuy
ể
n
độ
ng th
ẳ
ng. N
ế
u b
ẻ
lái v
ề
m
ộ
t bên
m
ạ
n nào
đ
ó thì dòng này k
ế
t h
ợ
p v
ớ
i thành ph
ầ
n ph
ả
n l
ự
c d
ọ
c c
ủ
a dòng n
ướ
c xoáy tròn do chân v
ị
t
t
ạ
o ra s
ẽ
t
ạ
o nên áp l
ự
c n
ướ
c trên m
ặ
t bánh lái làm cho tàu ng
ả
m
ũ
i v
ề
m
ạ
n b
ẻ
lái.
1.5.2.2. Thành ph
ầ
n xoáy tròn do chân v
ị
t t
ạ
o ra:
Khi chân v
ị
t quay
đạ
p lu
ồ
ng n
ướ
c v
ề
phía sau
để
đẩ
y tàu chuy
ể
n
độ
ng v
ề
phía tr
ướ
c, lu
ồ
ng
n
ướ
c này t
ạ
o thành m
ộ
t dòng n
ướ
c cu
ộ
n tròn theo chi
ề
u ngang c
ủ
a chân v
ị
t. Các ph
ầ
n t
ử
c
ủ
a dòng
b
ị
đẩ
y lui,
đồ
ng th
ờ
i tham gia 2 chuy
ể
n
độ
ng, v
ừ
a chuy
ể
n
độ
ng quay v
ừ
a chuy
ể
n
độ
ng th
ẳ
ng. Khi
đ
ó, dòng b
ị
đẩ
y lùi có th
ể
chia thành 2 thành ph
ầ
n t
ươ
ng
ứ
ng và có 2 ph
ầ
n l
ự
c
đ
ó là:
Thành ph
ầ
n phân l
ự
c ngang, ký hi
ệ
u C, Thành ph
ầ
n phân l
ự
c d
ọ
c, ký hi
ệ
u d.
C
1
C
4
ω
C
2
C
3
I
II
III
IV
D
4
D
1
D
2
Hình 1.17. Thành ph
ầ
n l
ự
c ngang C sinh ra khi chân v
ị
t chi
ề
u trái ch
ạ
y t
ớ
i
D
3
28
1.5.2.3. Dòng n
ướ
c hút theo tàu:
Khi
đứ
ng yên, thân tàu s
ẽ
chi
ế
m m
ộ
t l
ượ
ng r
ẽ
n
ướ
c
đ
úng b
ằ
ng th
ể
tích ph
ầ
n chìm c
ủ
a nó.
N
ế
u chân v
ị
t
đạ
p n
ướ
c
đẩ
y tàu ti
ế
n v
ề
phía tr
ướ
c thì ph
ầ
n chìm
đ
ó s
ẽ
để
l
ạ
i phía sau m
ộ
t vùng tr
ố
ng.
Do s
ự
chênh l
ệ
ch v
ề
áp su
ấ
t mà n
ướ
c
ở
xung quanh nhanh chóng tràn vào l
ấ
p ch
ỗ
tr
ố
ng
đ
ó và khi
tàu ti
ế
p t
ụ
c ch
ạ
y t
ớ
i thì các kho
ả
ng tr
ố
ng
đượ
c hình thành n
ố
i ti
ế
p nhau. N
ướ
c c
ũ
ng ti
ế
p t
ụ
c chuy
ể
n
độ
ng tràn vào l
ấ
p nh
ữ
ng kho
ả
ng tr
ố
ng trên. Khi
đ
ó s
ẽ
hình thành m
ộ
t dòng n
ướ
c
đ
u
ổ
i theo s
ự
chuy
ể
n
độ
ng c
ủ
a tàu
để
l
ấ
p ch
ỗ
tr
ố
ng
đ
ó do ph
ầ
n chìm c
ủ
a v
ỏ
tàu
để
l
ạ
i. Ng
ườ
i ta g
ọ
i dòng n
ướ
c
này là dòng n
ướ
c hút theo tàu. T
ố
c
độ
c
ủ
a dòng n
ướ
c hút theo m
ạ
nh nh
ấ
t
ở
g
ầ
n m
ặ
t n
ướ
c, gi
ả
m d
ầ
n
và
đạ
t giá tr
ị
g
ầ
n b
ằ
ng không
ở
d
ướ
i ki tàu.
N
ế
u tàu có chân v
ị
t chi
ề
u ph
ả
i khi ch
ạ
y t
ớ
i, dòng n
ứ
oc tràn vào này s
ẽ
sinh ra m
ộ
t l
ự
c có tác
d
ụ
ng
đẩ
y lái tàu qua trái. L
ự
c này ký hi
ệ
u là b. M
ặ
t khác, dòng này vì có chuy
ể
n
độ
ng xuôi theo tàu
nên m
ộ
t ph
ầ
n nào
đ
ó
đ
ã sinh ra l
ự
c c
ả
n dòng n
ướ
c ch
ả
y t
ừ
m
ũ
i v
ề
lái, làm gi
ả
m áp l
ự
c tác d
ụ
ng lên
m
ặ
t bánh lái khi bánh lái b
ẻ
sang m
ộ
t m
ạ
n nào
đ
ó.
Khi tàu
đứ
ng yên, dòng này không t
ồ
n t
ạ
i, nó ch
ỉ
xu
ấ
t hi
ệ
n khi tàu b
ắ
t
đầ
u chuy
ể
n
độ
ng và
t
ă
ng theo v
ậ
n t
ố
c tàu. Tàu có hình h
ộ
p thì dòng theo m
ạ
nh, vì v
ậ
y các tàu có ph
ầ
n lái vuông,
đ
áy
b
ằ
ng ph
ẳ
ng th
ườ
ng khó nghe lái h
ơ
n tàu có
đ
áy và
đ
uôi thon.
1
.5.3. Hiệu ứng chân vịt tới đặc tính điều động tàu
1.5.3.1. Khi tàu ch
ạ
y t
ớ
i bánh lái
để
s
ố
không:
- Xét m
ộ
t chân v
ị
t chi
ề
u ph
ả
i:
1. Thành ph
ầ
n phân l
ự
c ngang C:
Nh
ư
m
ụ
c 1.5.1.2.
đ
ã trình bày, t
ổ
ng h
ợ
p thành ph
ầ
n phân l
ự
c ngang C cùng chi
ề
u v
ớ
i chi
ề
u
tác d
ụ
ng c
ủ
a C
2
, C = C
2
- C
4
, thành ph
ầ
n này có tác d
ụ
ng
đẩ
y lái tàu sang trái, m
ũ
i tàu sang ph
ả
i (v
ớ
i
chân v
ị
t chi
ề
u ph
ả
i) (hình 1.18), còn v
ớ
i chân v
ị
t chi
ề
u trái thì ng
ượ
c l
ạ
i, t
ổ
ng h
ợ
p l
ự
c C s
ẽ
đẩ
y lái
tàu sang ph
ả
i còn m
ũ
i tàu sang trái)
2. Thành ph
ầ
n ph
ả
n l
ự
c c
ủ
a n
ướ
c D:
Thành ph
ầ
n này sinh ra khi tàu có tr
ớ
n t
ớ
i. T
ổ
ng h
ợ
p D cùng chi
ề
u v
ớ
i chi
ề
u tác d
ụ
ng c
ủ
a
D
3
, D = D
3
- D
1
, thành ph
ầ
n này có tác d
ụ
ng
đẩ
y lái tàu sang ph
ả
i, m
ũ
i tàu sang trái (v
ớ
i chân v
ị
t
chi
ề
u ph
ả
i) (hình 1.18), còn v
ớ
i chân v
ị
t chi
ề
u trái thì ng
ượ
c l
ạ
i, t
ổ
ng h
ợ
p l
ự
c D s
ẽ
đẩ
y lái tàu sang
trái, m
ũ
i tàu sang ph
ả
i.
3. Thành ph
ầ
n dòng n
ướ
c hút theo tàu b:
Nh
ư
m
ụ
c 1.5.2.3.
đ
ã trình bày, dòng n
ướ
c hút theo tàu b có tác d
ụ
ng
đư
a m
ũ
i sang ph
ả
i, lái
tàu sang trái (v
ớ
i chân v
ị
t chi
ề
u ph
ả
i), v
ớ
i chân v
ị
t chi
ề
u trái thì ng
ượ
c l
ạ
i, dòng hút theo tàu có tác
d
ụ
ng
đẩ
y lái tàu qua ph
ả
i, m
ũ
i tàu sang trái.
Ng
ườ
i ta nh
ậ
n th
ấ
y r
ằ
ng, khi chân v
ị
t chi
ề
u ph
ả
i quay, tàu có tr
ớ
n t
ớ
i thì t
ổ
ng h
ợ
p thành
ph
ầ
n phân l
ự
c ngang C và thành ph
ầ
n do dòng n
ướ
c hút theo tàu b s
ẽ
l
ớ
n h
ơ
n ph
ả
n l
ự
c D. Hay nói
cách khác C + b > D, t
ứ
c là làm cho lái tàu sang trái m
ũ
i sang ph
ả
i. N
ế
u chân v
ị
t chi
ề
u trái thì ng
ượ
c
l
ạ
i, t
ổ
ng h
ợ
p C + b > D, nh
ư
ng lái tàu l
ạ
i ng
ả
ph
ả
i còn m
ũ
i ng
ả
trái.
ω
D
3
C
1
C
4
C
3
C
2
I
IV
III
II
D
2
D
4
D
1
Hình 1.18. Hi
ệ
u
ứ
ng chân v
ị
t t
ớ
i
đặ
c tính
đ
i
ề
u
độ
ng tàu (chân v
ị
t chi
ề
u ph
ả
i, tàu
ch
ạ
y t
ớ
i, bánh lái
để
s
ố
không)