Công nghệ chế biến khí chương 7 điều khiển công nghệ và thiết bị điều khiển
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (3.55 MB, 70 trang )
1
CÔNG NGHỆ
CHẾ BIẾN KHÍ
Trường Đại học Công nghiệp
TS. Nguyễn Mạnh Huấn
2
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
3
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
CÁC CHẾ ĐỘ ĐIỀU KHIỂN VÀ LÀM THẾ NÀO ĐỂ ĐIỀU KHIỂN ỔN
ĐỊNH
- Quá trình làm việc trên giàn nén khí trung tâm có quá trình làm việc
của các phần tử và các thiết bị điều khiển không cần sự tham gia trực
tiếp của con người đó là quá trình điều khiển tự động.
- Mỗi phần tử điều khiển nhận một tín hiệu vào từ một số bộ phận của
hệ thống điều khiển, và tạo nên một tín hiệu ra đưa vào phần tử khác.
Các tín hiệu có thể là: dòng điện, điện áp, áp suất, nhiệt độ, lưu lượng,
vận tốc, gia tốc, vị trí…quĩ đạo của tín hiệu có thể là sóng điện, ống
dẫn, liên kết cơ….
4
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Hệ thống hở và hệ thống kín:
- Hệ thống hở là hệ thống không so sánh kết quả thực tế với trị số mong muốn (setpoint)
sau tác động điều khiển.
- Hệ thống kín là hệ thống tạo nên một tác động đo lường giữa tín hiệu vào (giá trị cần
setpoint) và tín hiệu ra (giá trị thực). Sai lệch giữa hai tín hiệu này được dùng làm tín hiệu
vào của cơ cấu điều khiển.
Hình 1: hệ thống điều khiển kín
PLC:
Programmable
Logic Controller
5
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
- Mạch phản hồi bắt đầu từ tín hiệu ra Y được đo (cảm biến) bởi thiết bị đo lường (Pressure, level,
temperature, flow transmitter ,detector… , qua cơ cấu chuyển đổi (cũng chính là bộ phận của thiết bị đo
lường) để biến thành tín hiệu được chuyển đổi Y’ tỉ lệ với Y. tín hiệu Y’ được so sánh với tín hiệu vào tạo
nên sai lệch (error)
ε= X-Y’ = giá trị cần – giá trị thực
được tính toán qua cơ cấu so sánh (là cơ cấu của bộ điều khiển).
- Thiết bị điều khiển biến đổi ε thành tín hiệu tác động u nhờ cơ cấu điều khiển. Tín hiệu tác động là tín
hiệu vào của hệ thống được điều khiển. Nó sẽ tác động vào cơ cấu tác động, cơ cấu tác động thường có
hai phần là bộ chuyển đổi (converter) và phần tử điều khiển (van, quạt, bơm…) làm thay đổi quá trình là
một đối tượng điều khiển, nhằm triệt tiêu sai lệch đã hình thành.
- Cơ cấu điều khiển thực hiện các chế độ điều khiển như sau: chế độ điều khiển tỷ lệ (P), chế độ tích phân
(I), chế độ đạo hàm (D). Chế độ P có thể sử dụng riêng biệt, hoặc kết hợp với một hoặc hai chế độ khác.
Chế độ I có thể dùng riêng rẽ nhưng thực tế ít dùng. Chế độ D không thể dùng riêng rẽ. Các tổ hợp hay
dùng là PI, PD, PID.
6
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Tuyến tính và phi tuyến
- Khi phân tích và thiết kế hầu hết các hệ thống điều khiển được coi là các phần tử tuyến tính,
tức là phần tử điều khiển cho tín hiệu ra tỉ lệ thuận với tín hiệu vào.
- Tuy nhiên có nhiều dạng phi tuyến khác nhau xuất hiện trong các phần tử điều khiển như : trễ,
khoảng chết, bão hoà… mà đặc tính của nó được thể hiện qua hình:
Hình 2: mối quan hệ giữa tín hiệu vào/ra
(I/O) của phần tử điều khiển
- a: tuyến tính: là mối quan hệ giữa tín hiệu
vào/ra (I/O) của phần tử điều khiển hoàn
toàn là một đường thẳng
- b: phi tuyến : có thể thay thế gần đúng bằng
một đường thẳng, đường này đặt ở vị trí sai
số bé nhất.
- c: Dải chết là một dãy các giá trị mà ở đó tín
hiệu vào X không làm thay đổi tín hiệu ra
- d: Trễ là tính phi tuyến dẫn đến giá trị tín
hiệu ra Y không trùng nhau khi tín hiệu vào
tăng hay giảm.
- e: Trễ và chết thể hiện sai lệch lớn nhất của
tín hiệu ra ở giới hạn trên và dưới
- f: Bão hoà là giới hạn của một dãy các giá
trị tín hiệu ra Y. Một phần tử thực đạt đến
giới
hạn bão hoà khi tín hiệu vào thay đổi tín hiệu
ra không thay đổi.
7
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Giảm chấn và ổn định
- Độ khuyếch đại của bộ phận điều khiển xác định một đặc tính quan trọng của hệ thống điều
khiển là dạng giảm chấn. Đặc tính này được hệ thống thể hiện ra như là một đáp ứng dưới tác
động của bên ngoài. Đáp ứng của hệ thống điều khiển thể hiện theo năm dạng như sau
Hình 3: các dạng đáp ứng
Khi độ khuyếch đại tăng đáp
ứng của hệ thống thay đổi theo
các dạng như sau:
a: quá giảm chấn,
b: giảm chấn tới hạn,
c: giảm chấn tắt dần,
d: đáp ứng biên độ không đổi,
e: đáp ứng biên độ tăng dần
8
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
- Ba loại đầu đặc trưng cho hệ thống ổn định, hai loại sau đặc trưng cho trạng thái
không ổn định. Kĩ thuật ổn định được dùng để làm tăng độ giảm chấn trong hệ
thống, và do đó cho phép đạt được độ khuyếch đại cao.
- Ý tưởng chung là tìm một tín hiệu chống lại sự thay đổi đại lượng được điều
khiển. Tín hiệu đó là tốc độ thay đổi đại lượng được điều khiển. Như ta biết đạo
hàm của một biến là tốc độ thay đổi của biến đó và tín hiệu làm ổn định này được
coi như đạo hàm của đại lượng được điều khiển.
- Độ giảm chấn tăng nếu đạo hàm của đại lượng được điều khiển được trừ ra khỏi
tín hiệu sai lệch trước khi vào cơ cấu điều khiển. Một tín hiệu làm ổn định khác là
đạo hàm của tín hiệu sai lệch, nếu đại lượng điều chỉnh là một hằng, tín hiệu này
bằng giá trị âm của đạo hàm đại lượng được điều khiển. Giảm chấn tăng nếu đạo
hàm độ sai lệch được cộng với tín hiệu sai lệch trước khi vào cơ cấu điều khiển.
9
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Mục tiêu của hệ thống điều khiển:
Hình 4: đáp ứng tải bậc thang
- Làm giảm tối đa giá trị của tín hiệu sai
lệch, một số hệ thống sai lệch có thể
giảm đến 0, trong khi các hệ thống khác
đòi hỏi sai lệch dư ε để bù cho sự thay
đổi của phụ tải.
- Trong cả hai trường hợp hệ thống điều
khiển cần đưa trị số sai lệch về giá trị
ổn định, trị số không thay đổi.
-
Mục tiêu thứ hai là giảm đến mức tối
thiểu thời gian ổn định tô
-
Mục tiêu thứ ba là giảm đến mức tối
thiểu sai lệch dư ε sau khi đạt được
trạng thái ổn định
10
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Đánh giá hệ thống điều khiển :
Cho thay đổi phụ tải theo hàm bậc thang sau đó quan sát đồ thị nếu biên độ của
một đỉnh dương bằng ¼ biên độ của đỉnh dương trước nó khi đó dao động là tắt
dần hội tụ tốt:
Hình 5: Suy giảm ¼ biên độ khi có tải bậc thang
11
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
SCADA và DCS
DCS (Distributed Control System - Hệ thống điều khiển phân tán)
- Hệ thống điều khiển phân tán dựa trên các phần cứng và phần mềm điều khiển và thu thập dữ liệu trên cơ
sở 1 đường truyền thông tin tốc độ cao, các module được phân tán và tổ chức theo 1 cấu trúc nhất định với
một chức năng và nhiệm vụ riêng. Các thiết bị giao tiếp trên đường truyền tốc độ cao này cho phép ghép
nối dễ dàng với các bộ PLC, Controller , các máy tính điều khiển giám sát khác.
- Các chức năng điều khiển được phân bố khắp hệ thống thay vì xử lý tập trung trên một máy tính đơn lẻ.
Một hệ thống DCS tiêu biểu có các trạm điều khiển hoạt động độc lập và điều khiển từng bộ phận chuyên
dụng của nhà máy
- Khả năng xử lý tín hiệu tương tự và chạy các trình tự phức tạp là thế mạnh của hệ thống DCS
SCADA (Supervisory Control And Data Acquisition - Hệ thống điều khiển giám sát và thu thập dữ liệu)
- Có thể hiểu SCADA là hệ thống dùng trong các ứng dụng điều khiển quá trình,công nghiệp hóa chất,
truyền tải điện năng nó dựa trên 1 máy tính xử lý trung tâm (máy chủ) , dữ liệu thu thập từ các cảm biến
đặt tại các phân xưởng, các tòa nhà, hay các trạm từ xa được gửi về máy tính trung tâm để quản lý và
điều khiển ( với 1 số lượng hạn chế các lệnh điều khiển được định nghĩa trước, gửi tới các cơ cấu chấp
hành).
12
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
SCADA (Supervisory Control And Data Acquisition) hiểu theo nghĩa truyền thống
là một hệ thống điều khiển giám sát và thu thập dữ liệu. Nhằm hỗ trợ con người
trong quá trình giám sát và điều khiển từ xa.
13
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Programmable Automation Controllers (PACs)
Human Machine Interfaces (HMIs)
DCS (Distributed Control System - Hệ thống điều khiển phân tán)
14
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Các ví dụ điều khiển trên giàn nén khí trung tâm:
- hệ thống điều khiển mức bình:
15
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
- hệ thống điều khiển áp suất
16
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
hệ thống điều khiển lưu lượng:
17
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
hệ thống điều khiển nhiệt độ
18
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Chế độ điều khiển tỉ lệ P:
Chế độ điều khiển tỉ lệ tạo nên tín hiệu ra ở bộ điều khiển tỉ lệ với tín hiệu sai lệch ε. Chúng có
mối quan hệ tuyến tính cố định giữa đại lượng được điều khiển và vị trí của đối tượng điều
khiển.
u = Pε+ u
o
qua công thức trên trong hệ thống điều khiển mức các bình tách nếu tăng độ khuyếch đại P
thì chỉ cần một sai lệch bé hơn của ε cũng đủ để van mở 100%, nói cách khác độ khuyếch đại
lớn đòi hỏi độ sai lệch nhỏ để đạt được vị trí của van cần thiết cho việc cân bằng quá trình tuy
nhiên việc tăng độ khuyếch đại này cũng dẫn đến xu hướng tăng dao động của đại lượng
được điều khiển cho nên cần chọn phương án dung hoà.
- Chế độ này được dùng cho những quá trình có dung lượng nhỏ và thay đổi phụ tải nhanh P
cần chọn đủ lớn để tránh dao động.
19
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Chế độ điều khiển tích phân I
chế độ điều khiển tích phân làm thay đổi tín hiệu ra u tỉ lệ với tích phân của tín hiệu sai lệch.
Chế độ này tạo nên một tác động điều khiển làm tăng liên tục tác động điều chỉnh theo thời
gian. Nếu độ sai lệch εnhỏ chế độ tăng I có tác dụng hiệu chỉnh chậm, nếu độ sai lệch εlớn
chế độ I tăng tác dụng hiệu chỉnh nhanh hơn. I là tốc độ tích phân (1/s) đặc tính I/O như sau:
Hình 6: đặc tính I/O
của chế độ I
chế độ I hầu như
luôn dùng với P
20
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Chế độ điều khiển đạo hàm D
u = D(dε/dt)
D là hằng số thời gian đạo hàm
Hình 7: Đáp ứng bước và độ dốc của chế độ D lí tưởng
- Chế độ điều khiển đạo hàm cho tín hiệu ra
u tỉ lệ với vận tốc thay đổi của ε chính là
dε/dt. Chế độ D ngăn chặn một sai lệch lớn
bằng cách tạo nên một tác động hiệu chỉnh
để chặn lại sự phát triển của nó.
- Chế độ D chỉ tác động vào tín hiệu ra của
bộ điều khiển khi tín hiệu sai lệch ε thay đổi
(tín hiệu ra không phụ thuộc vào giá trị của
độ sai lệch). Vì thế chế độ D không sử dụng
riêng biệt mà kết hợp với chế độ khác.
-
Đáp ứng bước và độ dốc của chế độ đạo
hàm lí tưởng được minh hoạ ở hình ở bất
cứ thời điểm nào, tín hiệu ra của bộ điều
khiển D luôn tỉ lệ với độ dốc, hoặc tốc độ
thay đổi của độ sai lệch ε.
-
Đáp ứng bước chỉ ra nguyên nhân làm cho
chế độ D không dùng riêng trong thực tế vì
ở mỗi vị trí thay đổi bước tín hiệu ra u có độ
dốc vô cực
21
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Chế độ điều khiển PI
Hình 8: Đặc tính I/O của chế độ PI
22
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
- Chế độ PI là tổ hợp của chế độ P và I. Ở đây khi thay đổi tín hiệu vào thì ban đầu bộ PI
làm việc như khâu tỉ lệ tức là tín hiệu ra u tỉ lệ với sai lệch ε, sau đó chế độ I tạo ra sự thay
đổi bổ xung ở tín hiệu ra tức là làm cho nó tỉ lệ với tích phân của tín hiệu sai lệch.
Tốc độ tích phân I là số đảo của thời gian cần thiết để chế độ I thích ứng lại sự thay đổi
của tín hiệu ra do chế độ P đưa đến.
- Chế độ I có xu hướng làm tăng dao động của đại lượng được điều khiển. Độ khuyếch đại
P cần phải giảm khi kết hợp chế độ I. Điều này làm giảm khả năng của bộ điều khiển để
đáp ứng sự thay đổi nhanh của phụ tải. Nếu quá trình có thời gian trễ lớn tín hiệu sai lệch
không đáp ứng kịp thời sai lệch hiện có trong quá trình, sự trễ này sẽ dẫn đến quá hiệu
chỉnh, chế độ I tiếp tục làm thay đổi tín hiệu ra của bộ điều khiển sau khi độ sai lệch đã
giảm đến 0.
- Chế độ PI thường dùng ở quá trình có thay đổi phụ tải lớn khi một mình chế độ P không
có khả năng giảm dao động và chế độ I tạo nên tác động hiệu chỉnh để triệt tiêu dao động.
23
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Chế độ điều khiển PD
u = Pε+ PD(dε/dt) - α(du/dt) + u
o
α: hệ số giới hạn của đạo hàm. Chế độ kết hợp này cho phép giảm xu hướng dao động và
cho phép tăng độ khuyếch đại tỉ lệ. Ơ chế độ PD, khâu P tạo nên sự thay đổi của tín hiệu ra
tỉ lệ với tín hiệu sai lệch, khâu D tạo nên sự thay đổi bổ sung của tín hiệu ra tỉ lệ với vận tốc
thay đổi của tín hiệu sai lệch ngăn chặn trước giá trị mới của tín hiệu sai lệch và thay đổi tín
hiệu ra một cách tương ứng. Tác động ngăn ngừa trước làm cho khâu D rất hữu dụng trong
điểu khiển quá trình có phụ tải thay đổi đột ngột
Chế độ điều khiển PID
Khâu I dùng để triệt tiêu sai lệch tỉ lệ khi thay đổi phụ tải. Khâu D giảm dao động và tác động
ngăn chặn sự thay đổi tín hiệu sai lệch. Vì thế PID được dùng ở quá trình có tải trọng thay
đổi đột ngột, mức độ thay đổi lớn .
Các bộ PID thực tế có chen hệ số giới hạn đạo hàm α vào khâu PD nên u sẽ là
24
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
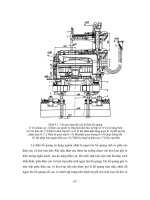
VAN
Hai loại van thông dụng là van trượt và van
xoay
- Van trượt tiêu biểu là van cầu (globe valve)
- Van xoay tiêu biểu là van bướm, van bi
Hình 9. Van điều khiển
25
Công nghệ chế biến khí
Công nghệ chế biến khí
CHƯƠNG 7. ĐIỀU KHIỂN CÔNG
NGHỆ VÀ THIẾT BỊ ĐIỀU KHIỂN
Tuỳ thuộc yêu cầu công
nghệ mà người ta dùng van
có đầu xả (plug) khác nhau,
cho biết mỗi loại đầu xả có
khả năng cho môi chất đi
qua tuỳ hành trình tương đối
của van hình 10
Hình 10: Các loại đầu xả của van