ứng dụng biến tần và plc trong hệ điều khiển cần trục công suất lớn
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.42 MB, 96 trang )
Đồ án tốt nghiệp
MỤC LỤC
IV.THI T K PH N M M I U KHI N 114Ế Ế Ầ Ề ĐỀ Ể 1
CH NG I: TÌM HI U V CÔNG NGH C U TR CƯƠ Ể Ề Ệ Ầ Ụ 4
I. NG C M T CHI UĐỘ Ơ Ộ Ề 13
CH NG V. THI T K H I U KHI N C U TR CƯƠ Ế Ế ỆĐỀ Ể Ầ Ụ 82
I.H TH NG C U TR C C C A NH M Y THU I N IALYỆ Ố Ầ Ụ Ũ Ủ À Á ỶĐỆ 82
II.THI T K H TH NG M IẾ Ế Ệ Ố Ớ 83
3. Tính toán v ch n i n tr hãm cho bi n t nà ọ đệ ở ế ầ 94
IV.THIẾT KẾ PHẦN MỀM ĐIỀU KHIỂN 114
IV.KHAI BÁO CHẾ ĐỘ ĐIỀU KHIỂN CHO BIẾN TẦN 115
TÀI LIỆU THAM KHẢO 125
PHỤ LỤC 126
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 1
Đồ án tốt nghiệp
LỜI MỞ ĐẦU
Trong quá phát triển công nghiệp của đất nước ta hiện nay, nhu cầu về
tự động hóa đang là một trong những yếu tố được đặt nên hàng đầu. Điều này
đảm bảo cho nhiều nghành công nghiệp có được thế đứng của mình trong
điều kiện cạnh tranh khác nhiệt của nền kinh tế thị trường ngày nay. Trong
quá trình sản xuất, máy nâng vận chuyển đóng một vai trò rất quan trọng đặc
biệt trong những nghành công nghiệp nặng. Máy nâng-vận chuyển là cầu nối
giữa các hạng mục công trình sản xuất riêng biệt, giữa các phân xưởng trong
một nhà máy, giữa các máy công tác trong một dây chuyền sản xuất.
Hiện nay có rất nhiều giải pháp trong việc lựa chọn hệ điều khiển
truyền động cầu trục. Mỗi hệ thống điều khiển truyền động đều có những ưu
và nhược điểm riêng, việc chọn lựa hệ truyền động điều khiển cầu trục nào
phụ thuộc vào rất nhiều yếu tố: Tính chất, số lượng hàng hóa cần vận chuyển
và đặc thù của quá trình sản xuất.
Ứng dụng biến tần và PLC trong hệ điều khiển cầu trục công suất lớn là
một trong những phương pháp ứng dụng hệ điều khiển truyền động hiện đại
nhất vào điều khiển cần trục. Hệ điều khiển truyền động này còn có thể ứng
dụng trong nhiều quá trình sản xuất khác trong công nghiệp đòi hỏi chỉ tiêu
chất lượng truyền động cao, điều khiển chính xác hệ thống băng tải, công
nghệ dệt
Trong thời gian gần 4 tháng tiến hành nghiên cứu và làm đồ án, được sự
hướng dẫn nhiệt tình, sát sao của thầy giáo Đào Đức Thịnh, chúng em đã
hoàn thành nhiệm vụ thiết kế tốt nghiệp của mình.
Tuy nhiên, do còn sự hạn chế của thời gian cũng như kinh nghiệm.
Đồng thời giữa lý thuyết và thực tế là một khoảng cách khá xa cho nên bản
thiết kế tốt nghiệp của chúng em không tránh khỏi những sai sót. Chúng em
rất mong được sự chỉ bảo, giúp đỡ của các thầy cô để em có thể hiểu rõ hơn
về vấn đề nghiên cứu của mình.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 2
Đồ án tốt nghiệp
Trước khi trở thành người kỹ sư, cho chúng em gửi lời cảm ơn tới tất cả
các thầy, các cô trong trường Đại học bách khoa Hà Nội nói chung, các thày
cô giáo trong bộ môn Kỹ thuật đo và Tin học công nghiệp nói riêng, KS Bùi
Thắng Mỹ PGĐ kỹ thuật công ty VATCO, đặc biệt là thầy giáo Đào Đức
Thịnh đã chỉ bảo, giúp đỡ chúng em trong suốt quá trình hoàn thành đề tài
này.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 3
Hà Nội, ngày 19 tháng 5 năm 2005
Sinh viên
PHẠM VĂN HOÀNG
ĐOÀN TRUNG KIÊN
Đồ án tốt nghiệp
CHƯƠNG I: TÌM HIỂU VỀ CÔNG NGHỆ CẦU TRỤC
I.TỔNG QUAN VỀ CẦU TRỤC
1.Khái quát chung về các máy nâng – vận chuyển
Sự phát triển kinh tế của mỗi nước phụ thuộc rất nhiều vào mức độ cơ
giới hóa và tự động hóa các quá trình sản xuất. Trong quá trình sản xuất, máy
nâng- vận chuyển đóng vai trò khá quan trọng. Máy nâng-vận chuyển là cầu
nối giữa các hạng mục công trình sản xuất riêng biệt, giữa các phân xưởng
trong một nhà máy, giữa các máy công tác trong một dây chuyền sản xuất
v.v…
Tính chất và số lượng hàng hóa cần vận chuyển tuỳ thuộc vào đặc thù
của quá trình sản xuất.
Trong ngành khai thác mỏ, trên các công trình thuỷ lợi, trên các công
trường xây dựng nhà máy thuỷ điện, xây dựng công nghiệp, xây dựng dân
dụng v.v… , phần lớn các công việc nặng nề như bốc, xúc, đào, khai thác đất
đá đều do các máy nâng-vận chuyển thực hiện.
Trong các nhà máy chế tạo cơ khí, máy nâng vận chuyển dùng để vận
chuyển phôi, bán thành phẩm và thành phẩm từ nhà máy này sang nhà máy
khác, từ phân xưởng này sang phân xưởng khác.
Việc sử dụng các máy nâng-vận chuyển trong các hạng mục công trình
lớn sẽ làm giảm đáng kể thời gian xây dựng, giảm bớt số lượng công nhân
(khoảng 10 lần). Đặc biệt một số nơi chỉ có thể vận chuyển bằng máy.
a.Phân loại máy nâng-vận chuyển
Phụ thuộc vào đặc điểm của hàng hóa cần vận chuyển, kích thước, số
lượng và phương vận chuyển mà các máy nâng-vận chuyển rất đa dạng. Việc
phân loại một cách hoàn hảo các máy nâng-vận chuyển rất khó khăn. Có thể
phân loại các máy nâng-vận chuyển theo các đặc điểm chính sau.
- Theo phương vận chuyển hàng hóa:
+Theo phương thẳng đứng: Thang máy, máy nâng
+Theo phương nằm ngang: Băng chuyền, băng tải
+Theo phương nằm nghiêng: Xe kíp, thang chuyền, băng tải
+Theo các phương kết hợp: Cầu trục, cần trục, cầu trục cảng,
máy xúc v.v…
- Theo cấu tạo của cơ cấu di chuyển:
+Máy nâng-vận chuyển đặt cố định: thang máy, máy nâng, thang
chuyền, băng tải, băng chuyền v.v …
+Di chuyển tịnh tiến: cầu trục cảng, cần trục con dê, các loại cầu
trục, cần trục v.v …
+Di chuyển quay với một góc quay tới hạn: cần cẩu tháp, máy
xúc v.v …
- Theo cơ cấu bốc hàng:
+Cơ cấu bốc hàng là thùng cabin, gầu treo …
+Dùng móc, xích treo, băng.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 4
Đồ án tốt nghiệp
+Cơ cấu bốc hàng nam châm điện.
- Theo chế độ làm việc:
+Chế độ dài hạn: băng tải, băng chuyền, thang chuyền
+Chế độ ngắn hạn lặp lại: máy xúc, thang máy, cần trục v.v…
b.Đặc điểm đặc trưng cho chế độ làm việc của hệ thống truyền động điện
máy nâng-vận chuyển
Máy nâng-vận chuyển thường được lắp đặt trong nhà xưởng hoặc để ở
ngoài trời. Môi trường làm việc của các máy nâng-vận chuyển rất nặng nề,
đặc biệt là ngoài hải cảng, các nhà máy hóa chất, các xí nghiệp luyện kim …
Các khí cụ, thiết bị điện trong hệ thống truyền động và trang bị điện
của các máy nâng-vận chuyển phải làm việc tin cậy trong mọi điều kiện
nghiệt nghã của môi trường, nhằm nâng cao năng suất, an toàn trong vận hành
và khai thác.
Đối với hệ truyền động điện cho băng chuyền và băng tải, phải đảm
bảo khởi động động cơ truyền động khi đầy tải, đặc biệt là vào mùa đông, khi
nhiệt độ môi trường giảm làm tăng mômen ma sát trong các ổ đỡ dẫn đến làm
tăng đáng kể mômen cản tĩnh M
c
(hình 1-1). Trên đồ thị ta thấy: Khi ω = 0 ,
M
c
lớn hơn 2 ữ 2,5 lần ứng với tốc độ định mức.
Đặc điểm trên cũng đúng với một số máy nâng-vận chuyển khác như
thang chuyền, băng chuyền …
Động cơ truyền động cầu trục, nhất là đối với cơ cấu nâng hạ, mômen
thay đổi theo tải trọng rất rõ rệt. Khi không có tải trọng mômen của động cơ
không vượt quá(15 ữ 20)% M
đm
, đối với cớ cấu nâng của cần trục gầu ngoạm
đạt tới 50% M
đm
,đối với động cơ di chuyển xe con bằng (35 ữ 50)% M
đm
, đối
với động cơ di chuyển xe cầu bằng (50 ữ 55)% M
đm
.
Năng suất của máy nâng- vận chuyển quyết định bởi hai yếu tố: tải
trọng của thiết bị và số chu kì bốc, xúc trong một giờ. Số lượng hàng hóa bốc
xúc mỗi một chu kì không như nhau và nhỏ hơn trọng tải định mức, cho nên
phụ tải đối với động cơ chỉ đạt (60 ữ 70)% công suất định mức của động cơ.
Do điều kiện làm việc của máy nâng-vận chuyển nặng nề, thường
xuyên làm việc trong chế độ quá tải nên các máy nâng-vận chuyển được chế
tạo có độ bền cơ khí cao, khả năng chịu quá tải lớn.
c.Yêu cầu đối với hệ truyền động và trang bị điện cầu trục
Cầu trục là một thiết bị nâng vận chuyển dùng trong các xí nghiệp công
nghiệp để vận chuyển nguyên vật liệu. Cầu trục có ba cơ cấu chính:
-Cơ cấu nâng hạ.
-Cơ cấu di chuyển xe cầu.
-Cơ cấu di chuyển xe cam (xe trục).
Chế độ làm việc của các cơ cấu cầu trục được xác định từ các yêu cầu
của quá trình công nghệ, chức năng của cầu trục trong dây truyền sản xuất.
Cấu tạo và kết cấu của cầu trục rất đa dạng. Khi thiết kế và chế tạo hệ thống
điều khiển và hệ thống truyền động điện phải phù hợp với từng loại cụ thể.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 5
Đồ án tốt nghiệp
Cầu trục trong phân xưởng luyện thép lò Machtanh, trong các phân
xưởng nhiệt luyện phải đảm bảo các chỉ tiêu kỹ thuật trong chế độ quá độ.
Cầu trục trong các phân xưởng lắp ráp phải đảm bảo quá trình mở máy êm,
dải điều chỉnh tốc độ rộng, dừng chính xác đúng nơi lấy hàng và hạ hàng
v.v…
Từ những đặc điểm trên, có thể đưa ra những yêu cầu cơ bản đối với hệ
truyền động và trang bị điện cho các cơ cấu của cầu trục:
- Sơ đồ cầu trúc của hệ điều khiển tự động đơn giản
- Các phần tử cấu thành có độ tin cậy cao, đơn giản về cấu tạo, thay thế
dễ dàng.
- Trong sơ đồ điều khiển phải có mạch bảo vệ quá tải và ngắn mạch.
- Quá trình mở máy diễn ra theo một luật định sẵn.
- Sơ đồ điều khiển cho từng chuyển động riêng biệt, độc lập.
- Có công tắc hành trình hạn chế hành trình tiến, lùi cho xe cầu, xe con;
hạn chế hành trình lên của cơ cấu nâng hạ.
- Đảm bảo nâng hạ hàng ở tốc độ thấp.
Từ những yêu cầu trên ta thấy :
-Với hệ truyền động: có thể dùng hệ truyền động xoay chiều hay một
chiều tùy thuộc vào chế độ làm việc của cầu trục:
So với động cơ một chiều, động cơ không đồng bộ không có hệ thống
cổ góp và chổi than nên kết cấu của nó gọn nhẹ hơn, dễ vận hành và sửa chữa
hơn. Ngày nay do sự phát triển của công nghệ bán dẫn nên giá thành của biến
tần ngày càng hạ với khả năng điều khiển tốc độ rộng, trơn do vậy những ưu
thế về điều khiển tốc độ động cơ một chiều không còn nữa. Vì thế xu hướng
chủ yếu khi thiết kế và chế tạo hệ truyền động điện cho cầu trục là thường
chọn hệ truyền động biến tần- động cơ xoay chiều.
-Với hệ thống điều khiển:
Có thể dùng hệ điều khiển với các công tác tơ, rơle, khởi động từ là các
tiếp điểm hay dùng các khí cụ phi tiếp điểm. Ngày nay với sự phát triển của
điện tử tin học hệ điều khiển các tiếp điểm trên có thể được thay thế bởi các
máy tính, các hệ PLC có độ tin cậy cao, khả năng điều khiển linh hoạt, dễ
dàng thay đổi chương trình điều khiển.
II. TÍNH CHỌN CÁC PHẦN TỬ TRONG HỆ TRUYỀN ĐỘNG ĐIỆN
VÀ TRANG BỊ ĐIỆN CẦU TRỤC.
1. Tính chọn công suất động cơ
a.Động cơ truyền động cơ cấu nâng-hạ
Động cơ truyền động cơ cấu nâng-hạ giữ vai trò quan trọng trong các
máy nâng-vận chuyển nói chung và trong cầu trục nói riêng. Động cơ truyền
động cơ cấu nâng-hạ làm việc ở chế độ ngắn hạn lặp lại, nên khi chọn công
suất động cơ phải tính đến cả tải động.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 6
Đồ án tốt nghiệp
*Tính toán phụ tải tĩnh. Phụ tải tĩnh của cơ cấu nâng-hạ chủ yếu là do
tải trọng quyết định. Để xác định phụ tải tĩnh, phải dựa vào sơ đồ động học
của cơ cấu nâng-hạ cụ thể. Giả sử có sơ động học như hình 1- 1
Phụ tải tĩnh khi nâng có tải:
M
n
=
c
t
ui
RGG
η
)(
0
+
, [Nm]
Trong đó:
G – Trọng lượng của tải trọng
[Nm].
G
0
– Trọng lượng của bộ lấy tải
[Nm].
R
t
– Bán kính của tang nâng [Nm].
U – Bội số của hệ thống ròng rọc.
c
η
_ Hiệu suất của cơ cấu.
I – Tỉ số truyền
I =
vu
nR
t
.
.2
π
Trong đó:
V – Tốc độ nâng tải [m/s].
N – Tốc độ quay của động cơ
[vg/s].
Hình 1-1: Sơ đồ động học của cơ cấu nâng- hạ dùng móc
Trong các công thức tính trên, hiệu suất
c
η
lấy bằng định mức khi tải
trọng bằng định mức,
cần xác định
c
η
theo tải trọng như
hình 1- 2
Xác định
c
η
dựa theo hệ số mang
tải:
K =
cdm
c
P
P
- Phụ tải tĩnh khi
nâng tải:
M
no
=
c
t
iu
RG
η
0
,
[Nm]
- Phụ tải tĩnh khi
hạ tải
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 7
H×nh 1-2: Quan hÖ phô thuéc theo t¶i träng
85.0=
dm
η
c
η
Đồ án tốt nghiệp
Có thể có hai chế độ hạ tải : Hạ động lực và hạ hãm.
Hạ động lực thực hiện khi tải trọng nhỏ. Khi mômen do tải trọng gây
ra không đủ để thắng mômen ma sát trong cơ cấu. Máy điện làm việc ở chế
độ động cơ.
Hạ hãm thực hiện khi hạ tải trọng lớn. Khi đó mômen do tải trọng gây
ra rất lớn. Máy điện phải làm việc ở chế độ hãm để giữa cho tải trọng được hạ
với tốc độ ổn định( chuyển động không có gia tốc).
Để xác định mômen trên trục của động cơ khi hạ tải, cần thực hiện vài
phép biến đổi sau:
Gọi mômen trên trục động cơ do tải trọng gây ra không có tổn thất là
M
t
thì:
M
t
=
iu
RGG
t
.
)(
0
+
, [Nm]
Khi hạ tải, năng lượng được truyền từ phía tải trọng sang cơ cấu truyền
động, nên:
M
h
= M
t
-
∆
M = M
t
.
c
η
, [Nm] (1-1)
Trong đó: M
h
– Mômen trên trục động cơ khi hạ tải ,[Nm]
∆
M – Tổn thất mômen trong cơ cấu khi hạ tải.
c
η
- Hiệu suất của cơ cấu khi hạ tải.
Nếu M
t
>
∆
M hạ hãm, M
t
<
∆
M hạ động lực.
Coi tổn thất trong cơ cấu nâng-hạ khi nâng tải và khi hạ tải như nhau, thì:
∆
M =
c
t
M
η
- M
t
= M
t
(
c
η
1
- 1 )
Do đó:
M
h
= M
t
– M
t
(
c
η
1
- 1 ) = M
t
(2 -
c
η
1
)
=
iu
RGG
t
.
)(
0
+
(2 -
c
η
1
) (1-2)
So sánh hai biểu thức 1- 1 và 1- 2 ta có:
c
η
= 2 -
c
η
1
Đối với những tải trọng tương đối lớn (
c
η
> 0,5) ta có
h
η
> 0 , M
h
> 0.
Điều đó có nghĩa là mômen động cơ ngược chiều với mômen phụ tải. Động
cơ làm việc ở chế độ hạ hãm. Khi tải trọng tương đối nhỏ (
c
η
< 0,5) thì
h
η
> 0,
M
h
< 0 , Mômen động cơ cùng chiều với mômen phụ tải. Động cơ làm việc ở
chế độ hạ động lực.
*Tính toán hệ số tiếp điện tương đối TĐ%. Chu kì làm việc của cơ cấu
nâng-hạ bao gồm các giai đoạn sau: Hạ không tải, nâng tải, hạ tải và nâng
không tải(giữa các giai đoạn thường có thời gian nghỉ).
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 8
Đồ án tốt nghiệp
Khi tính toán hệ số tiếp điện tương đối, chúng ta bỏ qua thời gian hãm
máy và mở máy.
Thời gian toàn bộ 1 chu kì làm việc của cơ cấu nâng-hạ có thể tính
được theo năng suất Q và tải trọng định mức G
đm
.
T
ck
=
Q
G
dm
3600
, [s]
TĐ% =
%100.
ck
lv
T
T
Trong đó: T
lv
thời gian làm việc của một chu kì, xác định theo điều kiện
làm việc cụ thể của cơ cấu.
*Chọn sơ bộ công suất động cơ.
Chọn sơ bộ công suất động cơ có thể theo phụ tải trung bình M
tb
, hoặc
theo phụ tải đẳng trị M
đt
kết hợp với hệ số tiếp điện tương đối TĐ%
Phụ tải trung bình, phụ tải đẳng trị tính theo các biểu thức sau:
M
tb
=
ck
n
i
ii
T
tM
k
1
.
.
=
∑
M
đt
=
ck
ii
n
i
T
tM
2
1=
∑
Trong đó: M
i
trị số mômen ứng với khoảng thời gian t
i
.
K=(1,2
÷
1,3) hệ số , phụ thuộc vào độ nhấp nhô của đồ thị
phụ tải, tần số mở máy, hãm máy.
Điều kiện để chọn công suất động cơ:
M
đmĐC
≥
M
tb
M
đmĐC
≥
M
đt
*Kiểm nghiệm
Để kiểm nghiệm công suất động cơ đã chọn, cần phải xây dựng biểu đồ
phụ tải chính xác. Sau khi đã xét đến thời gian mở máy, hãm máy và thời gian
nghỉ của động cơ, tính lại thời gian tiếp điện tương đối thực.
TĐ%
th
=
ck
immihi
T
ttt ∑+∑+∑
Trong đó:
∑
t
i
: Tổng thời gian làm việc
∑
t
ih
: Tổng thời gian hãm
∑
t
imm
: Tổng thời gian mở máy
và tính phụ tải chính xác theo đại lượng đẳng trị M
đtcx
Động cơ đã chọn là đúng nếu thoả mãn yêu cầu:
M
tc
< M
đmĐC
M
tc
= M
đtcx
%
%D
th
tc
TD
T
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 9
Đồ án tốt nghiệp
Trong đó: M
tc
: Mômen quy đổi về hệ số tiếp điện tiêu chuẩn
TĐ
tc
% : Hệ số tiếp điện tiêu chuẩn
b)Tính chọn công suất động cơ cho các cơ cấu di chuyển theo
phương nằm ngang
Ví dụ điển hình cho cơ cấu di chuyển ngang theo phương nằm ngang là
cơ cấu xe cầu và xe con của cầu trục. Sơ đồ lực được giới thiệu trên hình1-3
Phụ tải tĩnh của cơ cấu
là do lực cản chuyển động gây
ra. Lực đó bao gồm hai thành
phần chính: lực ma sát lăn trên
đường đi F
l
và lực ma sát
trong cổ trục bánh xe F
ct
.
Thành phần F
l
được xác
định theo biểu thức:
F
l
=
b
R
fGG ).(
0
+
, [N]
Trong đó:
G
0
: Trọng lượng bản thân cơ cấu, [N]
G : Trọng lượng tải trọng, [N]
R
b
: Bán kính bánh xe, [cm]
f : Hệ số ma sát lăn ,[cm]
Nếu bánh xe bằng thép lăn trên đường ray f = (0,05
÷
0,1) cm
Thành phần lực F
ct
được xác định theo biểu thức:
F’
ct
= (G
o
+ G)
µ
,[N]
Nếu dời điểm đặt của lực này về vành bánh xe thì tính theo biểu thức:
F
ct
= (G
o
+ G)
µ
b
ct
R
R
,[N]
Trong đó:
µ
là hệ số ma sát trượt : Khi dùng ổ trượt
µ
= 0,08
÷
0,05 ; khi
dùng ổ bi
µ
= 0,01
÷
0,05
R
ct
: Bán kính cổ trục, [cm]
Toàn bộ lực đặt lên bánh xe là:
F
c
= F
l
+ F’
ct
=
)(
0
fR
R
GG
ct
b
+
+
µ
, [N]
Đối với các cơ cấu có bánh xe sắt lăn trên đường ray, phải tính đến lực cản
ma sát giữa mép bánh xe và đường ray. Lực đó được tính thêm bằng hệ số dự
trù k, và toàn bộ lực cản trong trường hợp này sẽ là:
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 10
Hình 1-3: Sơ đồ lực của cơ cấu
di chuyển theo phương ngang
Đồ án tốt nghiệp
F’
c
= k.F
c
= k.
)(
0
fR
R
GG
ct
b
+
+
µ
, [N]
Hệ số k được lấy từ thực tế và kinh nghiệm vận hành.
Ví dụ : Đối với cầu khi dùng ổ bi: k = 1,25
÷
2; khi dùng ổ trượt
k = 2,5
÷
4. Đối với xe con tương ứng là k = 1,25
÷
1,6 và k = 2,5
÷
3,2
Nếu cơ cấu di chuyển trên đường dốc có góc nghiêng là
α
, toàn bộ lực
cản được tính theo biểu thức:
F”
c
=
)(
0
fR
R
GG
ct
b
+
+
µ
cos
α
±
(G
0
+ G)sin
α
, [N]
Đối với các cơ cấu làm việc ngoài trời, cần phải tính thêm lực cản của gió:
F
g
=
22
1,0.
∑∑
+ qvvq
g
C
γ
,[N]
Trong đó:
C hệ số kinh nghiệm = 0,8
÷
0,9
γ
trọng lượng riêng của không khí, 12N/m
3
q diện tích cản gió [m
3
]
g gia tốc trọng trường 9,8 m/s
2
∑
v
tốc độ tổng của cơ cấu và gió, [m/s]
Công suất và mômen trên trục của động cơ được tính theo biểu thức sau:
P
c
=
η
1000.60
.vF
c
, [kW]
M
c
=
η
.
.
i
RF
bc
,[Nm]
Trong đó:
P
c
, M
c
công suất và mômen cản trên trục động cơ
R
b
bán kính bánh xe
i tỉ số truyền
η
hiệu suất của cơ cấu
v tốc độ di chuyển theo ngang của xe
Chọn công suất động cơ, kiểm nghiệm công suất động cơ đã chọn tiến
hành theo các bước như đã nêu trên.
2.Tính toán và chọn cơ cấu phanh hãm
Phanh hãm là bộ phận không thể thiếu trong các cơ cấu chính của cầu
trục. Phanh dùng trong cầu trục thường có ba loại: Phanh guốc, phanh đĩa và
phanh đai. Nguyên lý hoạt động của các loại phanh nói trên về cơ bản giống
nhau. Khi động cơ của cơ cấu đóng vào lưới điện thì đồng thời cuộn dây của
nam châm phanh hãm cũng có điện. Lực hút của nam châm thắng lực cản của
lò xo, giải phóng trục động cơ để động cơ làm việc. Khi cắt điện, cuộn dây
nam châm cũng mất điện, lực căng của lò xo sẽ ép chặt má phanh vào trục
động cơ, để hãm.
Phanh điện từ thường chế tạo theo hai kiểu: Hành trình phần ứng
dài(hàng chục mm) và hành trình phần ứng ngắn (vài mm). Loại hành trình
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 11
Đồ án tốt nghiệp
dài yêu cầu lực hút nhỏ, nhưng kết cấu cơ khí cồng kềnh và phức tạp. Thực tế
thường dùng phanh hãm hành trình ngắn.
Sơ đồ động học của cơ cấu phanh đai và phanh guốc giới thiệu trên hình 1-
4
Khi cuộn dây của nam châm có điện, lực hút của nam châm sẽ nâng
cánh tay đòn L lên, làm cho đai phanh (hoặc guốc phanh) không ép chặt vào
trục động cơ. Khi mất điện, do tự trọng của nam châm G
nc
và đối trọng phanh
G
ph
cánh tay đòn hạ xuống và đai phanh ghì chặt trục động cơ.
Đối với loại phanh hành trình ngắn, khi mất điện, dưới tác dụng của lực
lò xo, đai phanh sẽ ép chặt vào trục động cơ.
Khi chọn cơ cấu phanh cần chú ý đến 3 thông số cơ bản: điện áp làm
việc, hệ số tiếp điện tương đối(TĐ%) và độ dài hành trình của phần ứng(hoặc
trị số góc quay lớn nhất).
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 12
G
pb
G
nc
F
s2
F
s1
a
l
2
l
l
1
a
NC
H×nh 1-4: S¬ ®å ®éng häc cña phanh hµnh tr×nh dµi
a-Phanh ®ai ; b-Phanh guèc
G
nc
G
ph
NC
l
l
1
l
2
C
b
a
A
L
C
F
2
F
1
L
G
L
G
L
a)
b)
Đồ án tốt nghiệp
CHƯƠNG II: ĐIỀU KHIỂN ĐÔNG CƠ
I.ĐỘNG CƠ MỘT CHIỀU
1.Điều chỉnh tốc độ bằng cách thay đổi điện áp đặt vào phần ứng động
cơ:
Đối với các máy điện một chiều, khi giữ từ thông không đổi và điều
chỉnh điện áp trên mạch phần ứng thì dòng điện, moment sẽ không thay đổi.
Để tránh những biến động lớn về gia tốc và lực động trong hệ điều chỉnh nên
phương pháp điều chỉnh tốc độ bằng cách thay đổi điện áp trên mạch phần
ứng thường được áp dụng cho động cơ một chiều kích từ độc lập.
Để điều chỉnh điện áp đặt vào phần ứng động cơ, ta dùng các bộ nguồn
điều áp như : máy phát điện một chiều, các bộ biến đổi van hoặc khuếch đại
từ… Các bộ biến đổi trên dùng để biến dòng xoay chiều của lưới điện thành
dòng một chiều và điều chỉnh giá trị sức điện động của nó cho phù hợp theo
yêu cầu.
Phương trình đặc tính cơ của động cơ điện một chiều kích từ độc lập:
Ta có tốc độ không tải lý tưởng: n
0
= U
đm
/K
E
Φ
đm
.Và độ cứng của đường
đặc tính cơ:
Khi thay đổi điện áp đặt lên phần ứng của động cơ thì tốc độ không tải lý
tưởng sẽ thay đổi nhưng độ cứng của đường đặc tính cơ thì không thay đổi.
Như vậy, khi ta thay đổi điện áp thì độ cứng của đường đặc tính cơ
không thay đổi. Họ đặc tính cơ là những đường thẳng song song với đường
đặc tính cơ tự nhiên:
Hình 2. 1 Họ đặc tính cơ khi thay đổi điện áp đặt vào phần ứng động cơ.
Phương pháp điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứng
thực chất là giảm áp và cho ra những tốc độ nhỏ hơn tốc độ cơ bản n
cb
. Đồng
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 13
M
KK
RR
K
U
n
ME
fu
E
2
Φ
+
−
Φ
=
fu
ME
RR
KK
dn
dM
+
Φ
−==
2
β
U
1
U
2
U
3
TN ( U
đm
)
n
0
n
cb
n
1
n
2
n
3
M
n
M
C
U
đm
> U
1
> U
2
> U
3
n
cb
> n
1
> n
2
> n
3
Đồ án tốt nghiệp
thời điều chỉnh nhảy cấp hay liên tục tùy thuộc vào bộ nguồn có điện áp thay
đổi một cách liên tục và ngược lại.
Theo lý thuyết thì phạm vi điều chỉnh D = ∞. Nhưng trong thực tế động
cơ điện một chiều kích từ độc lập nếu không có biện pháp đặc biệt chỉ làm
việc ở phạm vi cho phép: U
mincp
= U
đm
/10, nghĩa là phạm vi điều chỉnh:
D = n
cb
/n
min
= 10/1. Nếu điện áp phần ứng U < U
mincp
thì do phản ứng phần
ứng sẽ làm cho tốc độ động cơ không ổn định.
Nhận xét: Phương pháp điều chỉnh tốc độ bằng cách thay đổi điện áp
đặt vào phần ứng động cơ sẽ giữ nguyên độ cứng của đường đặc tính cơ nên
được dùng nhiều trong máy cắt kim loại và cho những tốc độ nhỏ hơn n
cb
.
* ưu điểm: Đây là phương pháp điều chỉnh triệt để, vô cấp có nghĩa là có
thể điều chỉnh tốc độ trong bất kỳ vùng tải nào kể cả khi ở không tải lý
tưởng.
* Nhược điểm: Phải cần có bộ nguồn có điện áp thay đổi được nên vốn đầu
tư cơ bản và chi phí vận hành cao.
2.Điều chỉnh tốc độ bằng cách thay đổi từ thông
Hình 2. 2 Sơ đồ nguyên lý điều chỉnh tốc độ bằng cách thay đổi từ thông.
Điều chỉnh từ thông kích thích của động cơ điện một chiều là điều
chỉnh moment điện từ của động cơ M = K
M
φI
ư
và sức điện động quay của
động cơ.
E
ư
= K
E
φn. Thông thường, khi thay đổi từ thông thì điện áp phần ứng được
giữ nguyên giá trị định mức.
Đối với các máy điện nhỏ và đôi khi cả các máy điện công suất trung bình,
người ta thường sử dụng các biến trở đặt trong mạch kích từ để thay đổi từ
thông do tổn hao công suất nhỏ. Đối với các máy điện công suất lớn thì dùng
các bộ biến đổi đặc biệt như: máy phát, khuếch đại máy điện, khuếch đại từ,
bộ biến đổi van…
Thực chất của phương pháp này là giảm từ thông. Nếu tăng từ thông thì
dòng điện kích từ I
KT
sẽ tăng dần đến khi hỏng cuộn dây kích từ. Do đó, để
điều chỉnh tốc độ chỉ có thể giảm dòng kích từ tức là giảm nhỏ từ thông so với
định mức. Ta thấy lúc này tốc độ tăng lên khi từ thông giảm: n = U/K
E
Φ.
Mặt khác ta có: Moment ngắn mạch M
n
= K
M
φI
n
nên khi φ giảm sẽ làm cho
M
n
giảm theo.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 14
• -
•
+ •
+ •
• -
C
Kẹ
R
Kẹ
I
ử
U
ẹ
U
KT
Đồ án tốt nghiệp
Độ cứng của đường đặc tính cơ:
Khi φ giảm thì độ cứng β cũng giảm, đặc tính cơ sẽ dốc hơn. Nên ta có
họ đường đặc tính cơ khi thay đổi từ thông như sau:
Phương pháp điều chỉnh tốc độ bằng cách thay đổi từ thông có thể điều
chỉnh được tốc độ vô cấp và cho ra những tốc độ lớn hơn tốc độ cơ bản.
Theo lý thuyết thì từ thông có thể giảm gần bằng 0, nghĩa là tốc độ tăng
đến vô cùng. Nhưng trên thực tế động cơ chỉ làm việc với tốc độ lớn nhất:
n
max
= 3n
cb
tức phạm vi điều chỉnh: D = n
max
/n
cb
= 3/1.
Bởi vì ứng với mỗi động cơ ta có một tốc độ lớn nhất cho phép. Khi
điều chỉnh tốc độ tùy thuộc vào điều kiện cơ khí, điều kiện cổ góp động cơ
không thể đổi chiều dòng điện và chịu được hồ quang điện. Do đó, động cơ
không được làm việc quá tốc độ cho phép.
Nhận xét: Phương pháp điều chỉnh tốc độ bằng cách thay đổi từ thông
có thể điều chỉnh tốc độ vô cấp và cho những tốc độ lớn hơn n
cb
. Phương pháp
này được dùng để điều chỉnh tốc độ cho các máy mài vạn năng hoặc là máy
bào giường. Do quá trình điều chỉnh tốc độ được thực hiện trên mạch kích từ
nên tổn thất năng lượng ít, mang tính kinh tế. Thiết bị đơn giản.
3.Điều chỉnh tốc độ động cơ bằng cách thay đổi điện trở phụ trên mạch
phần ứng
Phương pháp điều chỉnh tốc độ bằng cách thay đổi điện trở phụ trên
mạch phần ứng có thể được dùng cho tất cả động cơ điện một chiều. Trong
phương pháp này điện trở phụ được mắc nối tiếp với mạch phần ứng của động
cơ theo sơ đồ nguyên lý như sau:
Hình 2. 4 Sơ đồ nguyên lý điều chỉnh tốc độ động cơ bằng cách thay đổi điện
trở phụ trên mạch phần ứng.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 15
R
KK
ME
2
Φ
−=
β
• -
• -
+ •
+ •
•
•
I
ử
R
f
C
Kẹ
R
Kẹ
U
E
U
KT
Φ
2
Φ
1
Φ
đm
0 M
C
M
2
M
1
M
n
Hình 2. 3 Họ đặc tính cơ khi thay đổi từ thông.
n
cb
n
1
n
2
n
M
φ
ủm
> φ
1
> φ
2
n
cb
< n
1
< n
2
Đồ án tốt nghiệp
Ta có phương trình đặc tính cơ của động cơ điện một chiều kích từ độc
lập:
Khi thay đổi giá trị điện trở phụ R
f
ta nhận thấy tốc độ không tải lý
tưởng: và độ cứng của đường đặc tính cơ:
sẽ thay đổi khi giá trị R
f
thay đổi. Khi R
f
càng lớn, β càng nhỏ nghĩa là đường
đặc tính cơ càng dốc. ứng với giá trị R
f
= 0 ta có độ cứng của đường đặc tính
cơ tự nhiên được tính theo công thức sau:
Ta nhận thấy β
TN
có giá trị lớn nhất nên đường đặc tính cơ tự nhiên có
độ cứng lớn hơn tất cả các đường đặc tính cơ có đóng điện trở phụ trên mạch
phần ứng. Vậy khi thay đổi giá trị R
f
ta được họ đặc tính cơ như sau:
Hình 2. 5 Họ đặc tính cơ khi thay đổi điện trở phụ trên mạch phần ứng.
Nguyên lý điều chỉnh tốc độ bằng cách thay đổi điện trở phụ trên mạch
phần ứng được giải thích như sau: Giả sử động cơ đang làm việc xác lập với
tốc độ n
1
ta đóng thêm R
f
vào mạch phần ứng. Khi đó dòng điện phần ứng I
ư
đột ngột giảm xuống, còn tốc độ động cơ do quán tính nên chưa kịp biến đổi.
Dòng I
ư
giảm làm cho moment động cơ giảm theo và tốc độ giảm xuống, sau
đó làm việc xác lập tại tốc độ n
2
với n
2
> n
1
.
Phương pháp điều chỉnh tốc độ này chỉ có thể điều chỉnh tốc độ n < n
cb
.
Trên thực tế không thể dùng biến trở để điều chỉnh nên phương pháp này sẽ
cho những tốc độ nhảy cấp tức độ bằng phẳng γ xa 1 tức n
1
cách xa n
2
, n
2
cách
xa n
3
…
Khi giá trị n
min
càng tiến gần đến 0 thì phạm vi điều chỉnh:
D = n
cb
/n
min
≈ ∞.
Trong thực tế, R
f
càng lớn thì tổn thất năng lượng phụ tăng. Khi động
cơ làm việc ở tốc độ n = n
cb
/2 thì tổn thất này chiếm từ 40% đến 50%. Cho
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 16
M
KK
RR
K
U
n
ME
fu
E
2
Φ
+
−
Φ
=
u
dm
ME
TN
R
KK
2
Φ
−=
β
TN
R
p1
R
p2
R
p3
0
M
C
n
3
n
2
n
1
n
cb
n
0
n
M, I
0 < R
p1
< R
p2
< R
p3
n
cb
> n
1
> n
2
> n
3
const
K
U
n
dmE
dm
=
Φ
=
0
fu
dm
ME
RR
KK
+
Φ
−=
2
β
;
Đồ án tốt nghiệp
nên, để đảm bảo tính kinh tế cho hệ thống ta chỉ điều chỉnh sao cho phạm vi
điều chỉnh: D = ( 2 → 3 )/1.
Khi giá trị R
f
càng lớn thì tốc độ động cơ càng giảm. Đồng thời dòng
điện ngắn mạch I
n
và moment ngắn mạch M
n
cũng giảm. Do đó, phương pháp
này được dùng để hạn chế dòng điện và điều chỉnh tốc độ dưới tốc độ cơ bản.
Và tuyệt đối không được dùng cho các động cơ của máy cắt kim loại.
Nhận xét: Phương pháp điều chỉnh tốc độ bằng cách thay đổi điện trở phụ
trên mạch phần ứng chỉ cho những tốc độ nhảy cấp và nhỏ hơn n
cb
.
* ưu điểm: Thiết bị thay đổi rất đơn giản, thường dùng cho các động cơ cho
cần trục, thang máy, máy nâng, máy xúc, máy cán thép.
* Nhược điểm: Tốc độ điều chỉnh càng thấp khi giá trị điện trở phụ đóng vào
càng lớn, đặc tính cơ càng mềm, độ cứng giảm làm cho sự ổn định tốc độ khi
phụ tải thay đổi càng kém. Tổn hao phụ khi điều chỉnh rất lớn, tốc độ càng
thấp thì tổn hao phụ càng tăng.
*Nhược điểm chung của cả ba phương pháp điều chỉnh tốc độ động cơ một
chiều trên là độ cứng đặc tính cơ thấp. Để tăng độ cứng đặc tính cơ ta sử dụng
phương pháp điều chỉnh vòng kín, có các phương pháp điều chỉnh phản hồi
để tăng độ cứng đặc tính cơ:
-Hệ thống truyền động điện với phản hồi dương dòng điện
ĐC : Bộ điều chỉnh ∆U = U
đ
+ U
i
U
i
: Tín hiệu phản hồi dòng điện U
i
= β
i
I
U
đ
: Tín hiệu đặt
K
B
: Hệ số khuếch đại bộ biến đổi
Phương trình đặc tính cơ hệ kín
ω =
ΦK
UdKdcKb
-
2
Φ)(
β Σ
K
iKdcKbR −
.M
Độ cứng đặc tính cơ hệ kín:
K
β
=
iKdcKbR
K
β
.
)(
2
−Σ
Φ
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 17
Uñ
∆
U
Ui
Uñk
Boä ÑC
K
ÑC
K
B
BBA
(E
B
)
U
Ñ
0
Ñ
CKÑ
+
-
Đồ án tốt nghiệp
Độ cứng đặc tính cơ hệ hở:
h
β
=
Σ
)Φ(
2
R
K
So sánh
K
β
>
h
β
Muốn tăng độ cứng đặc tính cơ
K
β
ta phải tăng hệ số khuếch đại bộ
điều chỉnh K
đc
K
đc
=
iB
K
R
β
Σ
- Hệ thống truyền động điện với phản hồi âm tốc độ
FT : Máy phát tốc độ U
ω
= γω
γ
:
hệ số phản hồi tốc độ
Phương trình đặc tính cơ hệ kín:
ω =
γ
dc
ddcB
KK
UKK
B
KΦ
+
-
) K(KΦKK
Σ
B
γ
dc
K
R
+Φ
.M
Độ cứng đặc tính cơ hệ kín:
K
β
=
Σ
.Φ)Φ(
2
R
KdcKbKK
γ
+
Độ cứng đặc tính cơ hệ hở:
h
β
=
Σ
)Φ(
2
R
K
So sánh:
K
β
>
h
β
Thấy độ cứng đặc tính cơ hệ kín lớn hơn hệ hở,muốn tăng độ cứng đặc
tính cơ
K
β
ta phải tăng hệ số khuếch đại bộ điều chỉnh K
đc,
K
đc
tăng thì
K
β
tăng, hệ số khuếch đại bộ điều chỉnh K
đc
tăng dần đến ∞ thì độ cứng đặc tính
cơ hệ kín
K
β
cũng tăng dần đến ∞ hệ thống sẽ mất ổn định nên:
K
đc
<K
gh
K
gh
: biên giới ổn định
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 18
∆
U
U
ω
Uñk
Boä ÑC
K
ÑC
K
B
BBA
(E
B
)
U
Ñ
0
Ñ
CKÑ
+
-
FT
-
Đồ án tốt nghiệp
II.GIỚI THIỆU VỀ ĐỘNG CƠ KHÔNG ĐỒNG BỘ VÀ CÁC CÁCH
ĐIỀU KHIỂN
1. Nguyên lý điều chỉnh khi thay đổi điện trở trên mạch roto (thay đổi
hệ số trượt)
Đây là phương pháp điều chỉnh tốc độ đơn giản và được sử dụng
rộng rãi trong thực tế nhất là đối với các động cơ không đồng bộ roto quấn
dây. Sơ đồ nguyên lý và đặc tính cơ của động cơ khi thay đổi điện trở phụ
mạch roto
Khi động cơ đang làm việc ở trạng thái xác lập với tốc độ n. Muốn
điều chỉnh tốc độ của động cơ, ta đóng điện trở phụ vào cả ba pha của roto.
Tại thời điểm bắt đầu đóng điện trở phụ vào thì tốc độ động cơ chưa kịp thay
đổi, lúc này dòng và mômen giảm nên tốc độ động cơ giảm. Nhưng khi tốc độ
giảm thì độ trượt sẽ tăng nên sức điện động cảm ứng trên mạch roto E
2
tăng,
do đó dòng ở mạch roto tăng làm cho tốc độ của động cơ tăng.
Khi đưa điện trở phụ vào mạch roto thì hệ số trượt ứng với mômen cực
đại lúc này là:
Do đó, khi thay đổi điện trở phụ r
f
trong mạch roto thì hệ số trượt S
tf
sẽ
thay đổi và làm cho tốc độ động cơ thay đổi.
Từ các đường đặc tính trên hình vẽ (2-1), ta thấy với trị số phụ tải
không đổi, r
f
càng lớn thì động cơ làm việc với tốc độ càng thấp
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 19
22
1
2
''
n
f
tf
rr
rr
S
+
+±
=
M
r
f
= 0
r
f1
r
f2
r
f3
n
n
1
n
cb
n
1.1
n
1.2
n
1.3
M
t
M
c
a
b
c
d
r
f
o
o o
KĐB
I
1↓
I
2↓
•
•
•
•
•
•
a) Sơ đồ nguyên lý
b) Đặc tính cơ của động cơ khi thay đổi điện trở phụ
Đồ án tốt nghiệp
r
f1
< r
f2
< r
f3
n
cb
> n
1
>
n
2
> n
3
Khi M
c
bằng hằng số thì động cơ làm việc xác lập tương ứng với các
điểm a, b, c, d. Tốc độ của động cơ càng thấp thì tổn hao càng lớn, độ cứng
của đường đặc tính cơ bị giảm. Khi cho điện trở phụ vào càng lớn thì phạm vi
điều chỉnh tốc độ phụ thuộc vào trị số phụ tải và phụ tải càng lớn thì phạm vi
điều chỉnh càng hẹp
Nhận Xét.
Phương pháp điều chỉnh tốc độ động cơ không đồng bộ ba pha bằng
cách thay đổi điện trở phụ mạch roto có các ưu điểm sau:
- Có tốc độ phân cấp.
- Tốc độ điều chỉnh nhỏ hơn tốc độ cơ bản.
- Hạn chế được dòng mở máy.
- Làm tăng khả năng mở máy của động cơ khi đưa điện trở phụ vào mạch roto
- Các thao tác điều chỉnh đơn giản.
- Giá thành chi phí vận hành, sữa chữa thấp.
Mặc dù có các ưu điểm như trên nhưng vẫn còn các nhược điểm sau:
- Tốc độ ổn định kém
- Tổn thất năng lượng lớn.
ứng dụng
Đây là phương pháp được sử dụng rộng rải, mặc dù không được kinh tế
lắm. Thường được dùng đối với các hệ thống làm việc ngắn hạn hay ngắn hạn
lặp lại và dùng trong các hệ thống với yêu cầu tốc độ không cao như cầu trục,
cơ cấu nâng, cần trục, thang máy và máy xúc …
2. Điều chỉnh tốc độ động cơ KĐB bằng cách thay đổi số đôi cực
Trong nhiều trường hợp các cơ cấu sản xuất không yêu cầu phải điều
chỉnh tốc độ bằng phẳng mà chỉ cần điều chỉnh có cấp.Đối với động cơ không
đồng bộ ba pha, ta có tốc độ của từ trường quay:
n = n
1
(1-s)
Do đó khi thay đổi số đôi cực thì n
1
sẽ thay đổi, vì vậy tốc độ của động
cơ thay đổi.
Để thay đổi số đôi cực P ta thay đổi cách đấu dây và cũng là cách thay
đổi chiều dòng điện đi trong các cuộn dây mỗi pha stato của động cơ.
Khi thay đổi số đôi cực ta chú ý rằng số đôi cực ở stato và roto là như nhau.
Nghĩa là khi thay đổi số đôi cực ở stato thì ở roto cũng phải thay đổi theo. Do
đó rất khó thực hiện cho động cơ roto dây quấn, nên phương pháp này chủ
yếu dùng cho động cơ không đồng bộ roto lồng sóc và loại động cơ này có
khả năng tự biến đổi số đôi cực ở roto để phù hợp với số đôi cực ở stato.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 20
P
f
n
1
1
60
=
Đồ án tốt nghiệp
Đối với động cơ có nhiều cấp tốc độ, mỗi pha stato phải có ít nhất là hai
nhóm bối dây trở lên hoàn toàn giống nhau. Do đó càng nhiều cấp tốc độ thì
kích thước, trọng lượng và giá thành càng cao vì vậy trong thực tế thường
dùng tối đa là bốn cấp tốc độ.
Phương pháp điều chỉnh tốc độ động cơ không đồng bộ bằng cách thay đổi số
đôi cực có ưu điểm sau:
- Thiết bị đơn giản, giá thành hạ.
- Các đường đặc tính cơ đều cứng và tổn thất phụ không đáng kể.
- Động cơ làm việc chắc chắn.
- Điều chỉnh và khống chế tốc độ khá đơn giản.
Nhưng vẫn có các nhược điểm sau:
- Kích thước động cơ lớn.
- Phạm vi điều chỉnh không rộng lắm
D
max
= 8
- Chỉ cho những tốc độ cấp với độ nhảy cấp khá lớn.
- Hiệu suất sử dụng dây quấn thấp.
- Cấu tạo của động cơ tương đối phức tạp, nặng nề và giá thành
cao.
Đây là phương pháp được ứng dụng trong các máy như máy mài vạn
năng, thang máy nhiều tầng, máy nâng trong hầm mỏ và còn dùng trong một
số máy cắt kim loại, bơm ly tâm và quạt thông gió.
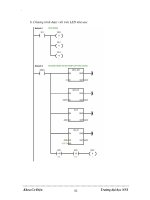
3. Điều chỉnh tốc độ KĐB bằng cánh thay đổi điện áp
Phương pháp điều chỉnh tốc độ không đồng bộ bằng cách thay đổi điện áp
thực hiện như sau:
Để thay đổi điện áp, người ta dùng bộ biến đổi có điện áp ra tùy theo
tín hiệu điều khiển đặt vào.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 21
o
U
2.1
S
t
MM
tu
M
t
n
TN (U
đm)
U
2.2
0
o
U
1
~
o
KĐB
BBĐ
U
ủk
•
•
•
•
•
•
Đồ án tốt nghiệp
Hình 5-1. a) Sơ đồ nguyên lý
b) Đặc tính cơ của động cơ khi thay đổi điện áp
Ưu nhược điểm:
Phương pháp điều chỉnh tốc độ động cơ không đồng bộ bằng cách thay
đổi điện áp nguồn được sử dụng rộng rải, nhất là bộ điều chỉnh dùng thyristor
vì thực hiện dể dàng và tự động hóa. Xét về chỉ tiêu năng lượng, tuy tổn thất
trong bộ biến đổi không đáng kể nhưng điện áp stato bị biến dạng so với hình
sin nên tổn thất phụ trong động cơ lớn do đó hiệu suất không cao. Mặt khác
khi điện áp lưới suy giảm theo phương trình đặc tính cơ mômen tới hạn sẽ
giảm bình phương lần độ suy gảm của điện áp
Phương pháp điều chỉnh tốc độ động cơ bằng cách thay đổi điện áp thường
dùng trong hệ truyền động mà mômen tải là hàm tăng theo tốc độ như quạt
thông gió, bơm ly tâm, …
4. Điều chỉnh tốc độ KĐB bằng cánh thay đổi tần số
a.Nguyên lý và quy luật điều chỉnh khi thay đổi tần số
Từ biểu thức:
P
f
n
1
1
60
=
Ta thấy, tốc độ đồng bộ của động cơ không đồng bộ có thể thay đổi nếu
ta thay đổi tần số lưới điện f
1
. Do đó tốc độ của động cơ n = n
1
(1 – s) , cũng
thay đổi theo.
Khi thay đổi tần số lưới điện f
1
, nhận thấy như sau:
Nếu bỏ qua điện trở dây quấn stato, tức là xem r
1
= 0 thì mômen tới hạn cực
đại là:
Trong đó: ω
1
tốc độ góc đồng bộ
x
n
= ω
1
L
n
L
n
= L
1
+ L’
2
Thay vào ta được:
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 22
n
n
t
x
U
x
n
U
M
1
2
1
1
2
1
2
3
55,9
2
3
ω
==
P
f
1
1
2
π
ω
=
n
t
Lf
PU
M
2
1
2
22
1
)2(2
3
π
=
2
1
2
1
t
n
2
2
f
U
aM :tacoù
L)2(2
3P
consta Ñaët
=
==
π
Đồ án tốt nghiệp
Biểu thức cho ta thấy khi tăng tần số nguồn mà vẫn giữ nguyên U
1
thì
mômen tới hạn cực đại M
t
giảm rất nhiều. Do đó khi thay đổi tần số f
1
thì
đồng thời phải thay đổi U
1
theo các quy luật nhất định nhằm đảm bảo sự làm
việc tương ứng giữa mômen động cơ và mômen phụ tải. Nghĩa là tỉ số giữa
mômen cực đại của động cơ và mômen phụ tải tĩnh đối với các đặc tính cơ là
hằng số.
Đặc tính cơ của bộ phận làm việc là quan hệ giữa tốc độ quay của
mômen phụ tải lên trục quay.
M
c
= f(n)
Theo biểu thức thực nghiệm mang tính chất tổng quát để mô tả dạng
đặc tính cơ của bộ phận làm việc như sau:
Trong đó:
M
c
Mômen cản của bộ phận làm việc lên trục quay ở tốc độ n (Nm)
M
co
Mômen cản của bộ phận làm việc lên trục quay khi n = 0.
M
cđm
Mômen cản của bộ phận làm việc lên trục quay khi n = n
đm
.
Như vậy, muốn điều chỉnh tốc độ động cơ không đồng bộ bằng cách
thay đổi tần số ta phải có một bộ nguồn xoay chiều có thể điều chỉnh tần số
điện áp một cách đồng thời theo các quy luật như sau:
Như vậy dạng đặc tính cơ của động cơ không đồng bộ khi thay đổi tần số
theo quy luật điều chỉnh hình 1-2.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 23
const
M
M
c
t
M ==
λ
x
)
ñm
cocñmcoc
n
n
)(M(MMM −+=
const
f
U
const
f
U
const
f
U
=
=
=
1
2
1
2
1
1
1
1
*
*
*
Đồ án tốt nghiệp
Hình 1-2. Các dạng đặc tính cơ của động cơ không đồng bộ khi thay đổi tần
số theo quy luật điều chỉnh U và f.
b.Điều khiển tốc độ động cơ không đồng bộ bằng biến tần
Biến tần là loại thiết bị điện tử chuyển đổi năng lượng điện xoay chiều
có tần số cố định thành tần số biến đổi cung cấp cho động cơ.
Động cơ không đồng bộ thường được điều khiển theo một luật nhất
định. Biến tần được thiết kế theo luật điều khiển tương ứng. Một số luật điều
khiển như: U/f = const, (u/f)
2
= const , điều khiển trực tiếp mômen …
Có hai loại biến tần là biến tần trực tiếp và biến tần gián tiếp
+ Biến tần trực tiếp ( cycloconveter ) :
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 24
0
n
M
M
c
=
a+b/n
n
1.1
n
cb
n
1.2
f
1.1
f
1ủm
f
1.2
n
1.1
n
1cb
n
1.2
MM
c
n
0
M
c
=
const
f
1.1
f
1ủm
f
1.2
n
M
c
= a+bn
2
M
0
n
1.1
n
1cb
n
1.2
f
1.1
f
1ủm
f
1.2
Đồ án tốt nghiệp
Là loại biến tần biến đổi trực tiếp điện áp vào xoay chiều U1(tần số f
1
)
chỉ cần qua một mạch van là chuyển ngay ra tải một điện áp xoay chiều có tần
số f
2
. Tần số f
2
luôn nhỏ hơn f
1
( f
1
= 0.1ữ0.5 f
2
). Về lý thuyết có thể lập biến
tần với f
2
>f
1
song mức độ phức tạp sẽ tăng lên nhiều.
Trong biến tần trực tiếp đường cong điện áp đầu ra là đường ghép nối
các đoạn hình sin của điện áp nguông bằng cách nối tải vào các pha của
nguồn một cách luân phiên nhờ các van bán dẫn. Các van bán dẫn trong biến
tần trực tiếp được chuyển mạch tự nhiên.
Biến tần trực tiếp có hiệu suất cao do chỉ có một lần biến đổi điện năng
và cho phép thực hiện hãm tái sinh năng lượng mà không cần có mạch điện
phụ. Cũng có thể dễ dàng thực hiện điều chỉnh điện áp và tần số đầu ra của
biến tần trực tiếp với dạng sóng điện áp gần hình sin.
Tuy vậy biến tần trực tiếp cũng có các nhược điểm dễ nhận thấy như:
hệ số công suất thấp, số lượng các van bán dẫn ở mạch lực khá nhiều và tần
số điều chỉnh bị giới hạn trên bởi tần số nguồn cung cấp và điều kiện chuyển
mạch tự nhiên của các van bán dẫn này.Vì vậy ngày nay người ta ít sử dụng
loại biến tần này và thường sử dụng lọai biến tần gián tiếp.
Biến tần trực tiếp thường được dùng cho truyền động điện công suất
lớn, tốc độ làm việc thấp, như để cung cấp cho các động cơ rôto lồng sóc, các
động cơ rôto dây quấn cấp bởi hai nguồn, các động cơ đồng bộ v.v…
+ Biến tần gián tiếp :
Là loại biến tần sử dụng một khâu trung gian một chiều. Đầu tiên điện
áp xoay chiều được chuyển thành điện áp một chiều nhờ mạch chỉnh lưu, sau
đó qua mạch lọc rồi mới được biến đổi trở lại thành điện áp xoay chiều với
tần số f
2
.
Đoàn Trung Kiên-Phạm Văn Hoàng ĐLTH1-K45 25
Mạch van
U
1
~(f
1
)
U
2
~(f
2
)