Bài giảng hệ thống điều khiển
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.69 MB, 206 trang )
Chương 1
Giới thiệu về Hệ thống Điều khiển
1. Sơ lược Lịch sử về Điều khiển Tự động
2. Các Ví dụ về Hệ thống Điều khiển
3. Thiết kế Hệ thống Điều khiển
4. Sự phát triển tương lai của Hệ thống Điều khiển
5. Các ví dụ thiết kế
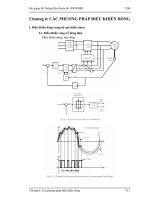
6. Ví dụ thiết kế liên tục : Ổ đĩa đọc Hệ thống.
7. Tổng kết
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
Yêu cầu
•
Nắm được các hiểu biết cơ bản của kĩ sư hệ thống điều khiển và có
thể đưa ra một vài ví dụ minh họa và mối quan hệ của chúng với
các vấn đề chính hiện thời.
•
Có thể thuật lại vắn tắt lịch sử các hệ thống điều khiển và vai trò
của chúng trong xã hội.
•
Có khả năng thảo luận các con đường tiến triển việc điều khiển
trong tương lai.
•
Nhận ra các phần tử khi thiết kế hệ thống điều khiển và nắm được
các đánh giá việc điều khiển trong ngữ cảnh thiết kế kỹ thuật.
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
Kỹ thuật liên quan tới việc hiểu biết và điều khiển vật chất và
tác động lên tự nhiên nhằm làm lợi cho con người.
•
Kỹ sư hệ thống điều khiển quan tâm tới việc hiểu biết và điều
khiển các khoảng môi trường của chúng, gọi là các hệ thống,
để cung cấp các sản phẩm kinh tế hữu dụng cho xã hội.
•
Kỹ thuật điều khiển dựa trên cơ sở nền tảng của lý thuyết phản
hồi và phân tích hệ thống tuyến tính, và nó tích hợp các khái
niệm của lý thuyết mạng và lý thuyết truyền thông.
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
Một hệ thống vòng hở sử dụng một thiết bị kích thích để điều khiển trực tiếp
một quá trình mà không có phản hồi. Ví dụ là một lò vi sóng được đặt thời
gian hoạt động cố định
•
Một hệ thống điều khiển vòng kín sử dụng phép đo đầu ra và phản hồi tín
hiệu này để so sánh nó với đầu ra mong muốn.
•
Ví dụ : nếu một con tàu đi lệch hướng sang phải, bánh lái được truyền động
để lái con tàu sang trái.
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
Điều khiển vòng kín có nhiều ưu điểm hơn so với điều khiển
vòng hở bao gồm khả năng loại bỏ được các nhiễu loạn bên
ngoài disturbances external và cải thiện độ suy giảm nhiễu
phép đo measurement noise
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
Rất nhiều hệ thống điều khiển phản hồi có nhiều hơn một vòng
phản hồi. Vòng bên trong có một bộ điều khiển và một cảm
biến và vòng bên ngoài cũng có một bộ điều khiển và cảm
biến khác.
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.2 SƠ LƯỢC LỊCH SỬ ĐIỀU KHIỂN TỰ
ĐỘNG
•
Ứng dụng đầu tiên của điều khiển phản hồi
xuất hiện trong sự phát triển của kỹ thuật điều
chỉnh phao ở Hy Lạp trong giai đoạn từ 300
đến 1 trước công nguyên.
•
Bộ điều tốc ly tâm của James Watt được phát
triển vào năm 1769 để điều khiển tốc độ động
cơ hơi nước .
•
Hệ thống phản hồi đầu tiên trong lịch sử được
cho là ở Nga là phát minh bộ điều chỉnh mức
nước bởi I.Polzunov vào năm 1765
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.2 SƠ LƯỢC LỊCH SỬ ĐIỀU KHIỂN TỰ ĐỘNG
•
Thế kỷ tiếp theo được đặc trưng bởi sự phát triển của các hệ thống
điều khiển tự động qua hiểu biết trực giác và sáng chế. Các nỗ lực để
tăng sự chính xác của hệ thống điều khiển dẫn đến sự tắt dần của dao
động quá độ chậm hơn và thậm chí là hệ thống không ổn định.
•
Năm 1868, J.C.Maxwell đã thiết lập nguyên lý toán học liên quan
đến lý thuyết điều khiển mà sử dụng mô hình phương trình vi phân
cho máy điều tốc
•
khoảng năm 1950, lý thuyết kỹ thuật điều khiển nhấn mạnh vào việc
phát triển và sử dụng phương pháp mặt phẳng-s và đặc biệt là cách
tiếp cận quỹ đạo nghiệm.
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.3 CÁC VÍ DỤ VỀ HỆ THỐNG ĐIỀU KHIỂN
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.3 CÁC VÍ DỤ VỀ HỆ THỐNG ĐIỀU KHIỂN
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.3 CÁC VÍ DỤ VỀ HỆ THỐNG ĐIỀU KHIỂN
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.3 CÁC VÍ DỤ VỀ HỆ THỐNG ĐIỀU KHIỂN
•
Lý thuyết điều khiển hiện đại quan tâm đến các hệ thống mà
đặc tính tự tổ chức, thích nghi, bền vững, có khả năng học hỏi
và tối ưu.
•
Việc điều khiển máy tính áp dụng vào công nghiệp điện năng
ngày càng có tính quyết định để cải thiện hiệu suất sử dụng
nguồn năng lượng.
•
Một nhà máy cán nóng thép có vốn đầu tư 100 triệu $ được điều
khiển nhiệt độ, bề ngang bề dài, dầy mỏng và chất lượng.
•
Phát triển về các phương tiện trên không không người lái
unmanned aerial vehicles (UAVs)
Chương 1
Giới thiệu về Hệ thống Điều khiển
•
1.4 THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN
•
Quá trình thiết kế bao gồm 7 khối xây dựng chính sắp xếp
thành ba nhóm sau:
1) Thiết lập các mục đích và các biến được điều khiển, và định
nghĩa các đặc điểm kỹ thuật so với việc thực hiện phép đo.
2) Định nghĩa và mô hình hóa hệ thống.
3) Thiết kế hệ thống điều khiển và mô phỏng và phân tích hệ
thống được hợp nhất.
Chương 1
Giới thiệu về Hệ thống Điều khiển
Chương 1
Giới thiệu về Hệ thống Điều khiển
1.5 TƯƠNG LAI PHÁT TRIỂN HỆ THỐNG ĐIỀU KHIỂN
•
Mục đích tiếp tục của hệ thống điều khiển là cung cấp tính linh
hoạt rộng rãi và mức độ độ tự trị cao.
•
Phạm vi nghiên cứu tập trung vào trí thông minh nhân tạo, tích
hợp cảm biến, thị giác máy tính, và chương trình hóa CAD/CAM
ngoại tuyến sẽ khiến cho các hệ thống trở nên phổ biến và kinh tế
hơn.
•
Nghiên cứu trong điều khiển giám sát, các phương pháp giao
diện người-máy, và sự quản lý kho dữ liệu máy tính nhằm giảm
gánh nặng vận hành và cải thiện hiệu quả hoạt động.
Chương 1
Giới thiệu về Hệ thống Điều khiển
Chương 1
Giới thiệu về Hệ thống Điều khiển
1.6 VÍ DỤ THIẾT KẾ
Các hệ thống điều khiển lưới điện thông minh.
Chương 1
Giới thiệu về Hệ thống Điều khiển
1.6 VÍ DỤ THIẾT KẾ Điều khiển tốc độ đĩa quay
Chương 2
Mô hình toán học của hệ thống
1. Phương trình vi phân của Hệ thống Vật lý
2. Xấp xỉ tuyến tính cho Hệ thống Vật lý
3. Biến đổi Laplace
4. Hàm truyền cho Hệ thống Tuyến tính
5. Mô hình sơ đồ khối
6. Mô hình graph tín hiệu.
7. Các ví dụ thiết kế
Chương 2
Mô hình toán học của hệ thống
•
Yêu cầu
–
Nhận biết các phương trình vi phân có thể mô tả hành vi động
học của các hệ thống vật lý.
–
Có thể dùng xấp xỉ tuyến tính hóa qua việc sử dụng chuỗi khai
triển Taylor.
–
Hiểu được ứng dụng và vai trò của biến đổi Laplace trong
việc thu được hàm truyền.
–
Nhận thức các sơ đồ khối (và lưu đồ graph tín hiệu) và vai trò
của nó khi phân tích hệ thống điều khiển.
–
Hiểu được vai trò quan trọng của việc mô hình hóa quá trình
thiết kế hệ thống điều khiển.
Chương 2
Mô hình toán học của hệ thống
•
Để hiểu và điều khiển các hệ thống phức tạp thì ta phải thu
được các mô hình toán học định lượng của các hệ thống đó.
•
Các hệ thống được nghiên cứu trong tự nhiên thường là động
lực học nên các phương trình mô tả cũng là các phương trình
vi phân.
•
Nếu các phương trình phi tuyến này có thể tuyến tính hóa, thì
ta có thể sử dụng biến đổi Laplace để đơn giản cách giải
quyết.
•
Thực tế trong các hệ thống phức tạp và việc bỏ đi nhiều nhân
tố xác đáng buộc ta phải đưa ra các giả thiết về hoạt động của
hệ thống.
Chương 2
Mô hình toán học của hệ thống
Cách tiếp cận mô hình hóa hệ thống động lực học gồm:
1. Định nghĩa hệ thống và các thành phần của nó.
2. Thiết lập công thức mô hình toán học và các giả thiết cần
thiết chủ yếu dựa trên nguyên lý cơ bản.
3. Thu được các phương trình vi phân biểu diễn mô hình toán
học.
4. Giải các phương trình cho các biến đầu ra mong muốn.
5. Xem xét nghiệm và các giả thiết.
6. Nếu cần thiết thì phân tích và thiết kế lại hệ thống.
Chương 2
Mô hình toán học của hệ thống
2.1 CÁC PHƯƠNG TRÌNH VI PHÂN CỦA
HỆ THỐNG VẬT LÝ
•
Xét hệ khối-lò xo lực tác dụng Ta(t).
•
Giả thiết lò xo có khối lượng bằng không.
•
Ngoại lực Ta(t) là through-variable.
•
Hiệu tốc độ góc qua phần từ lò xo xoắn là
across-variable
( ) ( ) 0 ( ) ( )
a s a s
T t T t T t T t
− = → =
( ) ( ) ( )
s a
t t t
ω ω ω
= −
Chương 2
Mô hình toán học của hệ thống
Bảng 2.1 Tóm tắt các biến through-variable và across-variable cho các hệ Vật lý
Hệ thống Biến Xuyên qua
Phần tử
Tích phân
through-
variable
Biến ngang qua
phần tử
Tích phân
across-variable
Điện Dòng điện, i Điện tích, q Hiệu điện thế, Từ thông móc
vòng,
Hệ cơ-
Chuyển động
tịnh tiến
Lực F Động lượng
tịnh tiến, P
Hiệu tốc độ, Hiệu dịch
chuyển, y21
Hệ cơ-
Chuyển động
quay
Momen, T Động lượng
động học, h
Hiệu tốc độ
góc,
Hiệu dịch
chuyển góc
Chất lỏng Tốc độ thể tích
dòng chảy
Thể tích, V Chênh áp, P21 Xung lượng áp
suất,
Nhiệt Tốc độ dòng
chảy nhiệt, q
Năng lượng
nhiệt, H
Hiệu nhiệt độ,
21
λ
21
ω
21
θ
21
γ
21
v
21
v
21
ℑ
Chương 2 Mô hình toán học của hệ thống