Ứng dụng điều khiển mờ để điều khiển hệ thống bơm xả nước tự động
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (304.04 KB, 13 trang )
MỤC LỤC
1. Khái niệm tập mờ 1
2. Phân biệt tập rõ- tập mờ và hàm thành viên 1
3. Các thuật ngữ sử dụng trong logic mờ 3
4. Biến ngôn ngữ 4
5. Một số phép tóan trên tập mờ 4
6. Luật hợp thành mờ 4
7. Giải mờ 5
8. Mô hình mờ Tagaki-Sugeno 7
9. Bộ điều khiển mờ 8
10.Thiết kế bộ điều khiển mờ 8
11. Ứng dụng điều khiển mờ để điều khiển hệ thống bơm xả nước tự động 9
12. Kết luận và tài liệu tham khảo 13
1
1
x
LA
0
5 8
0 20 30 50
Tuổi
25
1
µB
0.5
LOGIC MỜ VÀ ỨNG DỤNG TRONG ĐIỀU KHIỂN
BƠM XẢ NƯỚC TỰ ĐỘNG
1. Khái niệm tập mờ
Trong toán học chúng ta có các tập số thực R, tập các số nguyên tố P…Những tập như
vậy được gọi lá tập rõ, rõ được hiểu là một tập xác định S chứa n phần tử thì ứng vời mỗi phần
tử x ta xác định được một giá trị y = S(x)
Ta xét tốc độ của một chiếc xe máy: chậm, trung bình, hơi nhanh, rất nhanh. Các phát
biểu như vậy không phản ánh rõ bao nhiêu km/h, như vậy ta có một miền giá trị là một khỏang
nào đó chẳng hạn như 5km/h – 20km/h. Tập hợp L = {chậm, trung bình, hơi nhanh, rất nhanh}
như vậy được gọi là một tập các biến ngôn ngữ. Với mỗi thành phần ngôn ngữ x
k
của phát biểu
trên nếu nó nhận được một khả năng µ (x
k
) thì tập F gồm (x,µ(x
k
)) được gọi là tập mờ.
2. Phân biệt tập rõ- tập mờ và hàm thành viên
Tập rõ crisp set là tập hợp truyền thống theo quan điểm của Cantor (crisp set). Gọi A là một
tập hợp rõ, một phần tử x có thể có x ∈ A hoặc x ∉ A, Có thể sử dụng hàm χ để mô tả khái
niệm thuộc về. Nếu x ∈ A, χ (x) = 1, nguợc lại nếu x ∉ A, χ (x) = 0. Hàm χ được gọi là hàm đặc
trưng của tập hợp A.
Tập mờ F xác định trên tập kinh điển B là một tập mà mỗi phần tử của nó là một cặp
(x,µ(x
k
)), với x € X và µ
F
(x) là một ánh xạ: µ
F
(x): B → [0 1], trong đó µ
F
gọi là hàm thuộc và B gọi
là tập nền.
Ví dụ: Cho tập mờ về tuổi như sau
An 16 tuổi, µ(An)=1
Bình 25 tuổi, µ(Bình)=0.5
2
Hàm thành viên của tập mờ có 3 dạng cơ bản là: dạng tăng, dạng giảm và dạng chuông.
Dạng S tăng
µ (x)=S(x, α , β , γ) =
0 nếu x <= α
2(x- α )/( γ - α) nếu α < x <= γ
1 -[2(x- α )/( γ - α))] nếu β < x < γ
1 nếu x >= γ
Dạng S giảm
µ (x)=1- S(x, α , β , γ)
Dạng hình huông
Π (x; γ,β )=
S(x; γ - β , γ - β /2; γ ) if x <= γ
S(x; γ , γ + β /2; γ + β ) if x > γ
3
3. Các thuật ngữ sử dụng trong logic mờ
Độ cao tập mờ F là giá trị h= Sup µ
F
(x), trong đó Sup µ
F
(x) chỉ giá trị nhỏ nhất trong tất cả
các chặn trên của hàm µ
F
(x)
Miền xác định của tập mờ F ký hiệu là S là tập con thỏa:
S = Supp µ
F
(x)= { x B | ∈ µ
F
(x)> 0 }
Miền tin cậy của tập mờ F ký hiệu là T là tập con thỏa:
T = { x B | ∈ µ
F
(x)= 1 }
Các dạng hàm thuộc trong logic mờ: Gaussian, PI-shape, Sigmoidal,…
4. Biến ngôn ngữ
Biến ngôn ngữ là phần chủ đạo trong các hệ dùng logic mờ. Các thành phần ngôn ngữ của
cùng một ngữ cảnh được kết hợp lại với nhau.
Ta xét tốc độ của một chiếc xe máy:
- Rất chậm (VS)
- Chậm (S)
- Trung bình (M)
- Nhanh (F)
- Rất nhanh (VF)
Các phát biểu kiểu như trên gọi là biến ngôn ngữ của tập mờ. Gọi x là giá trị của biến tốc
độ, chẵng hạn x= 10km/k, x= 30 km/h…và hàm thuộc tương ứng của các biến ngôn ngữ trên
được ký hiệu là: µ
VS
(x), µ
S
(x), µ
M
(x), µ
F
(x), µ
VF
(x)
Biến tốc độ có hai miền giá trị:
- Miền các giá trị ngôn ngữ:
N={rất chậm, chậm, trung bình, nhanh, rất nhanh}
- Miền các giá trị vật lý:
V = { x B | x >= 0 }∈
Biến tốc độ được xác định trên miền ngôn ngữ N được gọi là biến ngôn ngữ. Với mỗi x B ∈
ta có hàm thuộc:
x
→
μ
X
= { μ
VS
(x), μ
S
(x), μ
M
(x), μ
F
(x), μ
VF
(x) }
Ví dụ hàm thuộc tại giá trị rõ x=65km/h là:
μ
X
(65) = { 0;0;0.75;0.25;0 }
5. Một số phép toán trên tập mờ
- Phép hợp hai tập mờ : X
∪
Y
Theo luật Max μX Y(b) = Max{ μX(b) , μY(b) }∪
Theo luật Sum μX Y(b) = Min{ 1, μX(b) + μY(b) }∪
Tổng trực tiếpμX Y(b) = μX(b) + μY(b) - μX(b).μY(b)∪
- Phép giao hai tập mờ : X∩Y
4
Theo luật Min μX Y(b) = Min{ μX(b) , μY(b) }∪
Theo luật Lukasiewicz μX Y(b) = Max{0, μX(b)+μY(b)-1}∪
Theo luật Prod μX Y(b) = μX(b).μY(b)∪
-
Phép bù tập mờ:
μ
X
c (b) = 1- μX(b)
6. Luật hợp thành
A. Mệnh đề hợp thành
Ví dụ điều khiển mực nước trong bồn chứa, ta xét đến 2 yếu tố:
Mực nước trong bồn L = {rất thấp, thấp, vừa}
Góc mở van ống dẫn G = {đóng, nhỏ, lớn}
Ta có các cơ chế suy diễn sau:
Nếu mực nuớc = rất thấp Thì góc mở van = lớn
Nếu mực nuớc = thấp Thì góc mở van = nhỏ
Nếu mực nuớc = vừa Thì góc mở van = đóng
Trong 3 cơ chế trên ta thấy có chung 1 cấu trúc Nếu A Thì B. Cấu trúc này gọi là mệnh
đề hợp thành.
Định lý Mamdani:
“ Độ phụ thuộc của kết luận không được lớn hơn độ phụ thuộc điều kiện”
Nếu hệ thống có nhiều đầu vào và nhiều đầu ra thì mệnh đề suy diễn sẽ có dạng như
sau:
If N = n
i
anh M = m
i
and… Then R= r
i
and K= k
i
and…
B. Luật hợp thành mờ
Luật hợp thành mờ là tên gọi chung của mô hình biểu diễn một hay nhiều hàm thuộc
cho một hay nhiều mệnh đề hợp thành.
Các luật hợp thành cơ bản:
Luật Max - Min
Luật Max - Prod
Luật Sum - Min
Luật Max - Prod
a. Thuật tóan xây dựng mệnh đề hợp thành cho hệ SISO
Luật mờ cho hệ SISO có dạng “IF A Then B”
Chia hàm thuộc µ
A
(x) thành n điểm x
i
(i=1,2,n )
Chia hàm thuộc µ
B
(y) thành m điểm y
j,
(j=1,2,n )
Ta xây dựng ma trận quan hệ mờ R
R=
)y,(xµ … … )y,(xµ
… ………
)y,(xµ … … )y,(xµ
)y,(xµ … … )y,(xµ
mnR1nR
m1R11R
m1R11R
=
)r … … r
… … …
r … … r
r … … r
nmn1
2m21
1m1l
Hàm thuộc µ
B’
(y) đầu ra ứng với giá trị rõ đầu vào x
k
có giá trị µ
B’
(y) = a
T
.R với a
T
=
{0,0,0…,0,1,0…0,0}. Số 1 ứng với vị trì thứ k.
Trong trường hợp đầu vào là giá trị mờ A’ thì µ
B’
(y) sẽ là: µ
B’
(y) = {l1,l2,l3,…,l
m
} với l
k
=
maxmin {a
i
,r
ik
}.
b. Thuật tóan xây dựng mệnh đề hợp thành cho hệ MISO
Luật mờ cho hệ MISO có dạng: “If cd1= A1 and cd2 = A2 and…Then rs =B”
Các bước xây dựng luật hợp thành R như sau:
o Rời rạc các hàm thuộc µ
A1
(x
1
), µ
A2
(x
2
),…, µ
An
(x
n
), µ
B
(y)
o Xác định độ thỏa mãn H cho từng vectơ giá trị rõ đầu vào x= {c1,c2,…,cn} trong
đó c1 là một trong các điểm mẫu của µ
Ai
(x
i
). từ đó ta suy ra
H= Min { µ
A1
(c
1
), µ
A2
(c
2
),…, µ
An
(c
n
)
o Lập ma trận R gồm các hàm thuộc giá trị mờ đầu ra cho từng vectơ giá trị mờ
đầu vào: µ
B’
(y) = Min {H, µ
B
(y)} hoặc µ
B’
(y)= H. µ
B
(y)
5
7. Giải mờ
Giải mờ là quá trình xác định giá trị rõ ở đầu ra từ hàm thuộc µ
B’
(y) của tập mờ B’. Có 2
phương pháp giải mờ:
a. Phương pháp trọng tâm
Điểm y’ được xác định là hòanh độ của điểm trọng tâm miễn nó được bao bởi trục
hòanh và đường µ
B’
(y)
Công thức:
y’=
∫
∫
s
s
dy
dy
µ(y)
yµ(y)
với S là miền xác định của tập mờ B’
- Phương pháp trọng tâm cho luật Sum-Min
Giả sử ta có m luật điều khiển, ký hiệu các giá trị mờ đầu ra của luật điều khiển thứ k là
µ
B’k
(y) thì qui tắc Sum-Min hàm thuộc là µ
B’
(y)=
∑
=
m
1k
kB'
(y)µ
với y’ được xác định như sau:
y’=
∫
∑
∫
∑
=
=
s
m
1k
kB'
1k
kB'
dy (y)µ
(y)µ
s
m
dyy
=
( )
∑
∫
∑
=
=
m
k
s
y
1
kB'
m
1k
kB'
dy (y)µ
dy (y)µ
=
∑
∑
=
=
m
k
k
m
k
k
A
M
1
1
M
i
=
dy
S
∫
(y)yµ kB'
A
i
=
dy
S
∫
(y)µ
kB'
(i=1,2,…,m)
Đối với dạng hình thang như vậy thì:
M
k
=
( )
ambmabmm
H
12
222
1
2
2
3333
6
++−+−
6
y
µ
Bmax
µ
B
S
y'
A
k
=
( )
bamm
H
++−
12
22
2
- Phương pháp độ cao
Từ công thức y’=
∑
∑
=
=
m
k
k
m
k
k
A
M
1
1
nếu như hàm thuộc có dạng Singleton thì: y’=
∑
∑
=
=
m
k
k
m
k
k
k
H
Hy
1
1
, trong
đó H
k
= µ
B’k
(y
k
)
b. Phương pháp cựa đại
B
1
B
2
µ
Bmax
µ
B
yy
1
y
2
- Xác định miền chứa giá trị y’ là giá trị mà tại đó µ
B’
(y) đạt Max và G= { y Y | ∈ µ
B’
(y) = H }
- Xác định y’ bằng 1 trong 3 cách sau:
o Nguyên lý cộng trung bình thì y’=
2
21
yy +
o Nguyên lý cận trái ta chọn y’=y
1
o Nguyên lý cận phải ta chọn y’=y
2
8. Mô hình mờ Tagaki-Sugeno
Các mô hình mờ ta thường sử dụng là mô hình Mamdani, tuy nhiên đối với lĩnh vực kỹ
thuật điều khiển thì ta sử dụng mô hình Tagaki-Sugeno.
Mô hình này sử dụng cả không gian trạng thái mờ lẫn mô hình linh họat hệ thống. Theo
Tagaki/Sugeno thì một vùng nhớ LX
k
được mô tả theo luật:
R
sk
: If x= LX
k
Then x= A(x
k
)x +B (x
k
)u
Luật này nếu vecto trạng thái x nằm trong vùng LX
k
thì hệ thống được mô tả bằng
phương trình vi phân cục bô x= A(x
k
)x +B (x
k
)u. Nếu tòan bộ các luật của hệ thống được
xây dựng thì có thể mô tả toàn bộ trạng thái của hệ trong toàn cục. Theo như luật này
thì A(x
k
) và B(x
k
) là những ma trận hằng của hệ thồng ở trọng tâm của miền LX
k
được
xác định từ các chương trỉnh nhận dạng. Từ đó rút ra:
x’=
( )
))(((
)
uxBxAw
kk
k
+
∑
(1)
với w
k
(x) [0 ,1] là độ thỏa mãn để chuẩn hóa cùa x∈
*
đối với LX
k
Luật điều khiển tương ứng sẽ là:
R
ck
: If x= LX
k
Then u= K(x
k
)x
Và luật điều khiển cho toàn bộ không gian trạng thái là:
u=
xxKw
N
k
k
k
)(
1
∑
=
(2)
từ (1) và (2) ta có phương trình động học cho hệ kín:
x’=
xxKxBxAxwxw
lkk
lk
))()()()(()( +
∑
7
Ví dụ 1 hệ TS gồm 2 luật điều khiển với 2 giá ttrị đầu vào x
1
, x
2
và đầu ra y như sau;
R1: If x
1
= Big and x
2
= Medium Then y
1
=x
1
-3x
2
R2: If x
1
= Small and x
2
= BigThen y
2
=4+2x
1
Đầu vào rõ là x
1
*=4 và x
2
*=60.
LX
Big
(x
1
) =0.3 và LX
Big
(x
2
) =0.35
LX
Small
(x
1
) =0.7 và LX
Small
x
2
) =0.75
Suy ra:
Min(0.3;0.75) =0.3 và Min(0.35;0.75) =0.35
y
1
= 4-3*60 = -176 và y
2
=4+2*4=12
hai thành phần R1 và R2 là (0.3;-176) và (0.35;12). Theo phương [háp tổng trọng số
trung bình thì:
y=
77.74
35.03.0
12*35.0)176(*3.0
−=
+
+−
9. Bộ điều khiển mờ
Cấu trúc một bộ điều khiển mờ
o Khâu mờ hóa
o Thực hiện luật hợp thành
o Khâu giải mờ
Xét bộ điều khiển mờ MISO, vectơ đầu vào x=[u
1
u
2
… u
n
]
T
Nguyên lý điều khiển mờ
- Giao diện đầu vào gồm: mờ hóa và các khâu hiệu chỉnh như tích phân, vi phân
- Thiếp bị hợp thành: triển khai luật hợp thành R
- Giao diện đầu ra: khâu giải mờ và khâu giao diện trực tiếp với đối tượng
8
e
µ
B
9
Thiết bị hợp thành
control
Van 1
Van 2
control
control
Bơm
Set
Set
10. Thiết kế bộ điều khiển mờ
- Định nghĩa tất cả các biến ngôn ngữ vào ra
- Xác định các tập mờ cho từng biến vào/ra (còn gọi là mờ hóa)
o Miền giá trị vật lý của các biến ngôn ngữ
o Số lượng tập mờ
o Xác định hàm thuộc
o Rời rạc hóa tập mờ
- Xây dựng luật hợp thành
- Chọn thiết bị hợp thành
- Giải mờ và tối ưu hóa
Phân loại các bộ điều khiển mờ:
- Điều khiển Mamdani (MCFC)
- Điều khiển mờ trượt (SMFC)
- Điều khiển tra bảng (CMFC)
- Điều khiển Tagaki/Sugeno (TSFC)
11. Ứng dụng điều khiển mờ để điều khiển hệ thống bơm xả nước tự động
Ta sử dụng logic mờ để hệ thống sẽ duy trì độ cao bồn nước ở 1 giá trị đặt trước như
sau:
Ba bộ điều khiển mờ (control) sẽ điều khiển: máy bơm (pump), van 1, van 2 để mực
nước ở 2 bồn đạt giá trị set trước.
Mô hình:
10
o
11
12
Z1
1
2
Z dat1
+
-
Z dat2
+
-
du/dt Fuzzy logic Controler1
de1
Z2
du/dt
de2
ez1
ez2
Fuzzy logic Controler2
Fuzzy logic Controler3
1
3
2
To pump
To van 1
To van 2
Sơ đồ khối:
Thiết lập hệ thống điều khiển mờ như sau:
- Xác định các ngỏ vào/ra:
o Có 4 ngõ vào: sai lệnh e1, e2, đạo hàm sai lệch de1, de2
o Có 3 ngõ ra: control1, control2, control3
- Xác định biến ngôn ngữ
o Sai lệch E = {âm lớn, âm nhỏ, bằng không, dương nhỏ, dương lớn}
E={NB,NM,ZR,PM,PB}
o Đạo hàm D = {giảm nhanh, giảm vừa,không đổi,tăng vừa, tăng nhanh}
D={DF,DM,ZR,IM,IP}
o Điều khiển C = {đóng nhanh, đóng chậm, không đổi, mở chậm, mở nhanh}
E={CF,CS,NC,OS,OF}
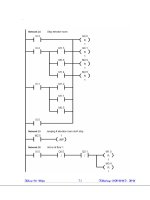
- Luật điều khiển
o Khối “controller1” và “controller2”:
Luật hợp thành mờ Max-Min
o
Khối
“controller3”:
Khối controller3
sẽ điều tiết lưu
lượng cho bồn
2, ta định mức
ưu tiên như thế này:
Khi sai lệch bồn 1 lớn thì van 2 sẽ điều tiết để
sai lệch này nhỏ rồi mới đến bồn 2
If error=NB and del=DF Then control=CF
If error=NB and del=DM Then control=CS
If error1=NB and del=ZR Then control=CS
13
DE
ERRO
R
DF DM ZR IM IP
NB OF OF NC
NM OS
ZR OF OS NC CS CF
PM CS
PB NC CF CF
Controller 2
Controller 1
DE
ERRO
R
DF DM ZR IM IP
NB CF CF NC
NM CS
ZR CF CS NC OS OF
PM OS
PB NC OF OF
If error1=NM and del=DF Then control=CS
If error1=PB and del=IB Then control=OF
If error1=PB and del=IM Then control=OF
If error1=PB and del=ZR Then control=OF
If error1=PM and del=IB Then control=OF
If error1 # NB and error2=NB and de1 # DF And de2=DF Then control=OF
If error1 # NB and error2=NB and de1 # DF And de2=DM Then control=OF
If error1 # NB and error2=NB and de1 # DF And de2=ZR Then control=OF
If error1 # NB and error2=NM and de1 # DF And de2=DF Then control=OS
If error1 # NB and error2=NM and de1 # DF And de2=DM Then control=OS
If error1 # PB and error2=PB and de1 # IB And de2=IB Then control=CF
If error1 # PB and error2=PB and de1 # IM And de2=IB Then control=CF
- Kết quả đáp ứng với các thông số thử nghiệm:
Chiều cao bồn: height=1m
Diện tích đáy: area=0.125m2
Lưu lượng max: pump maxflow= 1 lit/s
Diện tích ống dẫn pipe are=0.001m1
Mực nước đạt Z
dat
=[0.5 0.3]
Mức nước ban đầu Z
init
=[0 0]
Mực nước đạt Z
dat
=[0.5 0.4]
Mức nước ban đầu Z
init
=[0.8 0]
14
12. Kết luận và tài liệu tham khảo
Tìm hiểu mô hình đều khiển mờ.
Các bước trong thiết kế và điếu khiển tự động hệ thống bơm xả nước.
Do trình độ và thời gian còn hạn chế trong bài báo cáo thu hoạch này không tránh khỏi
những thiếu sót rất mong nhận được sự thông cảm cùa Thầy.
Em xin trân trọng cảm ơn.
Tài liệu tham khảo:
[1] Phan Xuân Minh, Nguyễn Doãn Phước, Lý thuyết điều khiển mờ, Nhà xuất bản Khoa
học Kỹ Thuật, 1997
[2] Nguyễn Hoàng Phương, Bùi Công Cường, Phan Xuân Minh, Nguyễn Doãn Phước,
Chu Văn Hỷ, Hệ mờ và ứng dụng, Nhà xuất bản Khoa học Kỹ Thuật, 1998
15