Thiết kế hệ điều chỉnh tốc độ động cơ một chiều kích từ độc lập có đảo chiều quay.DOC
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (468.03 KB, 75 trang )
§å ¸n tèt nghiƯp
Bé GI¸O DơC Vµ DµO T¹O CỘNG HỊA XÃ HỘI CHỦ NGHĨA VIỆT NAM
TR¦êng ®¹i häc b¸ch khoa hµ néi Độc Lập – Tự Do – Hạnh Phúc
∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ =========&⊗&=========
NHIƯM Vơ §å ¸N TèT NGHIƯP
Họ vàtên sinh viên: ……………………Số hiệu sinh viên……………
Khoá Khoa Điện Ngành học : Điện kỹ thuật
1. Đầu đề thiết kế :
Thiết kế hệ điều chỉnh tốc độ động cơ một chiều kích từ độc lập có đảo
chiều quay.
2. Các số liệu ban đầu :
P
đm
= 6 (kw); U=220 (v); ω = 105 (rad/s); I
đm
= 32,6 (A); R
ư
=0,668 (Ω);
Kφ
đm
= 1,86 (v.s); J = 0,14 KGm
2
3. Nội dung các phần thuyết minh và tính toán :
- Tổng quan về các phương pháp điều chỉnh tốc độ động cơ một chiều
- Tính chọn mạch động lực
- Tính chọn mạch điều khiển
- Đặc tính cơ
4. Các bản vẽ, đồ thò (ghi rõ các loại và kích thước bản vẽ)
4 – 5 bản vẽ A
0
5. Họ tên cán bộ hướng dẫn : Nguyễn Trung Sơn
6. Ngày giao nhiệm vụ đồ án :
7. Ngày hoàn thành đồ án :
Ngày tháng năm
TRƯỞNG BỘ MÔN CÁN BỘ
HƯỚNG DẪN
Sinh viên đã hoàn thành và nộp đồ án tốt nghiệp tháng năm
Người duyệt
Trêng §¹i Häc B¸ch Khoa Hµ Néi 1
§å ¸n tèt nghiƯp
CHƯƠNG I
TỔNG QUAN VỀ CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ
ĐỘNG CƠ MỘT CHIỀU KÍCH TỪ ĐỘC LẬP
1.1. khái quát chung:
Động cơ điện một chiều cho phép điều chỉnh tốc độ quay liên tục trọng một
phạm vi rộng và trong nhiều trường hợp cần có đặc tính cơ đặc biệt, thiết bò đơn
giản hơn và rẻ tiền hơn các thiết bò điều khiển của động cơ ba pha.Vì một số ưu
điểm như vậy cho nên động cơ điện một chiều được sử dụng rất phổ biến trong
công nghiệp, trong giao thông vận tải….
2.1. Phương trình đặc tính cơ:
Để điều khiển được tốc độ động cơ điện một chiều kích từ độc lập thì ta phải
phân tích, tìm các mối quan hệ giữa tốc độ với các thông số khác của động cơ để
từ đó đưa ra phương pháp điều khiển. Động cơ điện một chiều kích từ độc lập thì
dòng kích từ độc lập với dòng phần ứng. Vì được nuôi bởi hai nguồn một chiều
độc lập với nhau.
E
u
I
u
U
u
R
f
I
kt
U
kt
R
kt
C
kt
Hình 1. Sơ đồ nối dây của động cơ một chiều kích từ độc lập
Theo hình 1 ta viết phương trình cân bằng điện áp của mạch phần ứng
U
ư
=E
ư
+ ( R
ư
+ R
f
)I
ư
(1)
Trong đó: U
ư
: Điện áp đặt lên phần ứng động cơ (V).
E
ư
: Sức điện động phần ứng (V)
R
ư
: Điện trở của mạch phần ứng (
Ω
)
R
f
: Điện trở phụ trong mạch phần ứng (
Ω
)
I
ư
: Dòng điện mạch phần ứng (
Α
)
Với R
ư
= r
ư
+ r
cf
+r
b
+ r
ct
Trong đó : r
ư
điện trở cuộn dây phần ứng (
Ω
)
r
cf
: Điện trở cuộn cực từ phụ (
Ω
)
Trêng §¹i Häc B¸ch Khoa Hµ Néi 2
§å ¸n tèt nghiƯp
r
b
: Điện trở cuộn bù (
Ω
)
r
ct
: Điện trở tiép xúc chổi điện (
Ω
)
•
Sức điện động E
ư
của phần ứng động cơ được xác đònh theo biểu thưc sau
E
ư
=
a
PN
π
2
φω
=
κφω
(2)
trong đó : p : Số đôi cực từ chính
N : Số thanh dẫn tác dụng của cuộn dây phần ứng
a : Số đôi mạch nhánh song song của cuộn dây phần ứng
φ
: Từ thông kích từ dưới mỗi cực từ (wb)
ω : Tốc độ góc (rad/s)
k =
a
PN
π
2
: Hệ số cấu tạo của động cơ
Nếu biểu diễn sức điện động theo tốc độ quay n (vòng/ phút) thì
E
ư
=
e
k
φ
n ( 3)
ω =
60
2 n
π
=
55,9
n
vì vậy E
ư
=
a
PN
60
n
φ
với k
e
=
a
PN
60
: Hệ số sức điện động của động cơ
k
e
=
55,9
k
≈ 0,105 k
Thay (1) vào (2) và biến đổi ta được
ω =
u
U
K
φ
-
( )
+
u f
K
R R
φ
I
ư
(4)
Biểu thức (4) là phương trình đặc tính cơ điện của động cơ.Mặt khác, mômen
điện từ M
đt
=
u
k I
φ
(5)
Nếu bỏ qua tổn thất trong các ổ trục, tổn thất tự quạt mát và tổn thất trong thép
thì mômen cơ trên trục của động cơ bằng mômen điện từ, ta ký hiệu là M, tức là
M
đt
= M
cơ
=M
Vậy phương trình đặc tính cơ của động cơ là
ω =
u
k
U
φ
-
2
)(
φ
k
RR
fu
+
M (6)
Biểu thức (6) là phương trình đặc tính cơ của động cơ điện một chiều kích từ độc
Trêng §¹i Häc B¸ch Khoa Hµ Néi 3
§å ¸n tèt nghiƯp
lập
Nếu không xét đến ảnh hưởng của phản ứng phần ứng ngang trục làm giảm từ
thông φ của động cơ tức là xem φ=const thì quan hệ ω=f(M,I) là tuyến tính.
ω
0
ω
dm
ω
∆
IM
dmdm,
IM
nmnm,
IM ,
0
ω
Hình 2 đồ thò đặc tính cơ của động cơ điện một chiều kích từ độc lập
Từ đồ thò ta có : khi I
ư
= 0 hoặc M =0 ta có
ω
=
φ
k
U
=ω
0
(7)
ω
0
:
được gọi là tốc độ không tải lý tưởng của động cơ , khi ω=ω
0
ta có
I
ư
=
RR
fu
U
+
=I
nm
(8)
Và M =k
φ
I
nm
=M
nm
(9)
I
nm
, M
nm
: được gọi là dòng điện ngắn mạch và mômen ngắn mạch. Mặt khác
phương thình đặc tính (4) và (6) cũng có thể viết dưới dạng
ω =
φ
k
U
u
-
φ
k
R
I
ư
=ω
0
-
ω
∆
(10)
ω =
φ
K
U
u
-
)(
2
φ
k
R
M = ω
0
-
ω
∆
(11)
vì I
ư
=
φ
K
M
ta suy ra từ (5)
trong đó R = R
ư
+ R
f
, ω
0
=
φ
K
U
u
Trêng §¹i Häc B¸ch Khoa Hµ Néi 4
§å ¸n tèt nghiƯp
∆ω=
φ
K
R
I
ư
=
)(
2
φ
k
R
M (12)
∆ω : được gọi là độ sụt tốc độ ứng với giá trò của M (hay I) , ta có thể biểu diễn
đặc tính cơ điện và đặc tính cơ trong hệ đơn vò tương đối với điều kiện từ thông
là đònh mức (
φ
=
φ
dm
)
Trong đó ω*=
0
ω
ω
, I* =
dm
I
I
,M
∗
=
dm
M
M
, R* =
R
cb
R
( R
cb
=U
đm
/ I
đm
được gọi là điện trở cơ bản )
Từ (4) và (6) ta viết đặc tính cơ điện và đặc tính cơ ở đơn vò tương đối
ω*=1- R*I* (13)
ω
∗
= 1- R*M
∗
(14)
• Độ cứng của đặc tính cơ :
β=
ω
d
dM
=
R
k
nm
∑
)
2
(
φ
(15)
• Công suất (năng lượng điện)
Từ phương trình lý tưởng : IU =(E
ư
+IR
ư
)I (16)
Ta có P
điện
=P
đt
+
∆Ρ
Trong đó P
đt
=IE
ư
công suất điện từ
∆
P =I
2
R
ư
tổn hao công suất cơ trên điện trở phần ứng
Thực tế P
điện
=P
đt
+ ∆P
ư
+ ∆P
0
(17)
Với ∆P
0
tổn hao ma sát do sự quay
Từ biểu thức (4) hoặc (6) ta thấy
ω
là một hàm phụ thuộc R,
φ
, U :
〈ω=f(R,Φ,U) do đó để điều chỉnh tốc độ động cơ điện một chiều kích từ độc
lập có ba phương pháp điều khiển sau :
-
Điều khiển điện trở phụ phần ứng
-
Điều khiển từ thông kích từ
-
Điều khiển điện áp phần ứng
Sau đây ta xem xét từng phương pháp điều khiển một
2. CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH
TỪ ĐỘC LẬP
2.1 Phương pháp điều khiển bằng điện trở phụ phần ứng (R
f
):
•Nguyên lý điều chỉnh:
Nối thêm điện trở phụ R
f
vào mạch phần ứng
Ta đã phân tích ở trên nên ta có ω= f〈 R
f
, φ
kt
, U , giả thiết rằng :
Trêng §¹i Häc B¸ch Khoa Hµ Néi 5
§å ¸n tèt nghiƯp
Nếu giữ φ=φ
đm
=const ; U= U
đm
= const; R
ư
=const thì ω=f(R
f
)
Muốn thay đổi được giá trò R
f
của mạch phần ứng bằng cách nối tiếp một điện
trở phụ (R
f
) thay đổi được giá trò vào mạch phần ứng.
Lúc này ta có : R = R
ư
+ R
f
Từ phương trình đặc tính cơ : ω=
φ
dm
dm
K
U
-
)
(
2
φ
K
RR
dm
fu
+
M
Từ phương trình trên ta thấy : khi tăng giá trò của R
f
thì tốc độ của động cơ giảm,
khi giảm giá trò của R
f
thì tốc độ của động cơ tăng .
Lúc này ta có tốc độ không tải lý tưởng: ω
0
=
φ
dm
dm
K
U
= const (18)
Còn độ cứng của đặc tính cơ : β =
RR
K
fu
dm
+
)
2
(
φ
= var (19)
Như vậy khi thay đổi R
f
cho ta một họ đặc tính như sau:
ω
0
ω
M
dm
M
dm
2
0
=
R
f
R
f 1
R
f 2
R
f 3
0
M
Hình 1-3 : Đặc tính cơ của động cơ điện một chiều kích từ độc lập ở những
điện trở phụ khác nhau
• Nhận xét: Nếu R
f
càng lớn thì tốc độ động cơ càng giảm, đồng thời I
nm
và M
nm
cũng giảm. Phương pháp này được dùng để hạn chế dòng điện động cơ khi khởi
động.
- Ưu điểm : Đơn giản , dễ thực hiện
- Nhược điểm : + Độ cứng đặc tính cơ thấp
+ Tổn thất năng lượng trên điện trở lớn
+ Phạm vi điều chỉnh hẹp
2.2. Phương pháp điều chỉnh bằng từ thông kích từ:
Trêng §¹i Häc B¸ch Khoa Hµ Néi 6
§å ¸n tèt nghiƯp
• Nguyên lý điều chỉnh:
Điều chỉnh từ thông kích từ của động cơ điện một chiều là điều chỉnh mô men
điện từ của động cơ M = kφI
ư
và sức điện động quay của động cơ
E
ư
=kφω
I
kt
U
kt
E
U
I
C
kt
Hình 1-4 :Sơ đồ nối dây điều chỉnh kích từ của động cơ điện một chiều kích từ
độc lập.
Từ biểu thức (4) và (6) ta thấy ω= f(U, φ
kt
, R
f
), nếu giữ U=U
đm
=const và điện
trở phần ứng R
ư
= const (R
f
=0 ) lúc này ω= f(φ
kt
). Để thay đổi được tốc độ ω ta
cần thay đổi φ
kt
, mà từ thông kích từ do dòng kích từ sinh ra.
Vậy để điều chỉnh φ
kt
ta mắc thêm biến trở R
v
vào mạch kích từ, khi điều chỉnh
φ
kt
ta phải tuân theo điều kiện sau.
Không thể tăng dòng kích từ I
kt
lớn hơn dòng đònh mức của cuộn dây kích
từ vì nó phá hỏng cuộn kích từ và khi φ
kt
= φ
đm
đã bảo hoà rồi, nếu muốn tăng I
kt
thì φ
kt
cũng không tăng đáng kể nên ta điều chỉnh bằng cách giảm φ
kt
.
• Trong trường hợp này ta có:
-
Tốc độ không tải lý tưởng
ω
0
=
φ
x
dm
K
U
= var
-
Độ cứng của đặc tính cơ
β =
R
u
X
K
2
)(
φ
= var
Do cấu tạo của động cơ điện, thực tế thường điều chỉnh giảm từ thông. Nên khi
từ thông giảm thì ω
x
tăng, còn β sẽ giảm. Ta có đồ thò đặc tính cơ với ω
x
tăng
dần và độ cứng của đặc tính giảm dần khi giảm từ thông.
Trêng §¹i Häc B¸ch Khoa Hµ Néi 7
§å ¸n tèt nghiƯp
ω
I
ω
ω
0
ω
1
ω
2
φ
dm
φ
1
φ
2
Ι
nm
Ι
dm
0
ω
2
ω
1
ω
0
φ
2
φ
1
φ
dm
0
Μ
dm
Μ
2nm
Μ
1nm
Μ
nm
Μ
Hình 1-5 : Đặc tính cơ và cơ điện của động cơ điện một chiều kích từ độc
lập khi giảm từ thông.
Từ đồ thò ta nhận thấy khi từ thông thay đổi vơi φ
đm
> φ
1
>φ
2
ta có:
-
Dòng điện ngắn mạch : I
nm
=
R
U
u
dm
=const
-
Mô men ngắn mạch : M
nm
=kφ
x
I
nm
=var (M
nm
> M
nm1
>M
nm2
)
Từ đồ thò đặc tính ta thấy ω
0
<ω
1
<ω
2
. Vậy phương pháp điều chỉnh từ thông là
phương pháp điều chỉnh trên tốc độ cơ bản.
• Các chỉ tiêu chất lượng khi giảm từ thông φ
kt
-
Tốc độ không tải lý tưởng ω
x
=
φ
x
dm
K
U
tăng
- Độ cứng đặc tính cơ β =
R
u
x
K
2
)(
φ
giảm
-
Dải điều chỉnh không rộng D =
max
min
ω
ω
= 1:2
+ Tốc độ nhỏ nhất bò chặn bởi đặc tính tự nhiên (φ=φ
đm
)
+ Tốc độ lớn nhất ω
max
bò giới hạn bởi độ bền cơ khí và điều kiện chuyển mạch
của động cơ
- Ưu điểm : Công suất mạch điều chỉnh nhỏ, tổn thâùt năng lượng nhỏ
- Cũng có thể sản xuất những động cơ giới hạn điều chỉnh 1:5 thậm chí đến 1:8
nhưng phải dùng những phương pháp khống chế đặc biệt, do đó cấu tạo và cộng
nghệ chế tạo phức tạp khiến cho giá thành của máy tăng lên.
2.3. Phương pháp điều khiển động cơ điện môït chiều kích từ độc lập bằng
thay đổi điện áp phần ứng:
Trêng §¹i Häc B¸ch Khoa Hµ Néi 8
§å ¸n tèt nghiƯp
Từ phương trình đặc tính cơ (6) ω =
φ
K
U
u
-
)(
2
φ
k
RR
fu
+
M
Giả thiết φ = φ
đm
=const; R
ư
=const,(R
f
=0), M = const. Lúc này ω = f(U
ư
)
Khi thay đổi điện áp phần ứng ta có:
-
Tốc độ không tải lý tưởng ω
0
=
φ
K
U
u
= var
-
Độ cứng của đặc tính cơ β =
R
k
u
)(
2
φ
= const
Như vậy khi thay đổi điện áp phần ứng cho ta một họ các đặc tính sau.
ω
ω
0
ω
1
ω
2
ω
3
ω
i
0
IM ,
IM
dmdm
,
TN
U
dm
U
1
U
2
U
3
U
i
Với U
đm
>U
1
>U
2
>U
3
>……….>U
i
Hình 1-6 : Đồ thò đặc tính cơ của động cơ điện một chiều kích từ độc lập khi
điện áp phần ứng thay đổi
Như vậy khi thay đổi điện áp phần ứng động cơ ta được một họ đặc tính cơ song
song với đặc tính tự nhiên.
• Nhận xét :
-
Ưu điểm : + không gây ồn
+ không gây tổn hao phụ trong động cơ
+ dải điều chỉnh rộng D ≈10 : 1
+độ cứng đặc tính cơ không đổi trong toàn dải điều chỉnh
+ dễ tự động hoá
Trêng §¹i Häc B¸ch Khoa Hµ Néi 9
§å ¸n tèt nghiƯp
-
Nhược điểm : + phương pháp điều chỉnh này cần một bộ nguồn có thể
thay đổi trơn điện áp ra
+ điều khiển phức tạp
• Kết luận : Với sự phát triển của khoa học kỹ thuật như hiện nay thì phương
pháp này càng được sử dụng phổ biến trong sản xuất cũng như trong các lónh
vực khác.
2.4. Nuyên lý điều chỉnh:
• Đặc tính điều chỉnh :
Để điều chỉnh điện áp phần ứng, ta phải sử dụng một bộ biến đổi, điều chỉnh
được điện áp đầu ra cấp cho mach phần ứng của động cơ.
U
U
dk
C
kt
var
=
U
ra
+
−
BBĐ
∼
E
Hình 1-7 : Sơ đồ ngyên lý điều chỉnh động cơ
Bộ biến đổi dùng để biến đổi điện áp xoay chiều của lưới điện thành một chiều
và điều chỉnh được giá trò điện áp đầu ra theo yêu cầu. Điện trở trong của bộ
biến đổi R
bđ
phụ thuộc vào loại thiết bò, vì thông thường công suất của bộ bến
đổi và động cơ xấp xỉ bằng nhau nên R
bđ
cũng có giá trò đáng kể so với R
ư
của
động cơ.
Từ sơ đồ nguyên lý ta có sơ đồ thay thế
E
bd
E
u
R
bd
R
ud
U
Hình 1-8 : Sơ đồ thay thế nguyên lý điều chỉnh động cơ
Trêng §¹i Häc B¸ch Khoa Hµ Néi 10
§å ¸n tèt nghiƯp
Từ sơ đồ thay thế ta có phương trình cân bằng điện áp.
E
ư
= U
bđ
– (R
bđ
+ R
ư
)I
ư
(20)
Sức điện động của động cơ
E
ư
= kφ
đm
ω (21)
Từ biểu thức (20) và (21) ta có
kφ
đm
ω = U
bđ
– ( R
bđ
+ R
ư
)I
ư
(22)
Từ phương trình (22) ta có phương trình đặc tính cơ điện.
ω =
φ
dm
bd
K
U
-
φ
dm
ubd
K
RR
+
I
ư
(23)
Phương trình đặc tính cơ
ω =
φ
dm
bd
K
U
-
)(
2
φ
dm
K
RR
ubd
+
M (24)
Với M =kφ
đm
I
ư
Trong đó φ
đm
là từ thông đònh mức của động cơ, φ
đm
= const.
Tốc độ không tải lý tưởng
ω
0
=
φ
dm
bd
U
Độ cứng của đặc tính cơ
β =
RR
k
ubd
dm
+
)(
2
φ
Ta thấy tốc độ không tải lý tưởng không phụ thuộc vào M, I mà phụ thuộc vào
U
bđ
.
U
bđ
= k
a
U
đk
Trong đó : k
a
là hệ số khuyếch đại của bộ biến đổi
U
đk
là điện áp điều khiển
Từ đó suy ra : ω
0
=
φ
dm
dka
K
Uk
= f(U
đk
)
Từ phương trình (23) và (24) ta có đồ thò đặc tính được biểu diễn như sau.
Trêng §¹i Häc B¸ch Khoa Hµ Néi 11
§å ¸n tèt nghiƯp
ω
U
dk 2
U
dk1
U
dk 3
U
dk 4
ω
01
ω
02
ω
03
ω
04
0
M,I
ĐTTN
Hình 1-9 : Đồ thò đặc tính cơ điện khi U
bđ
thay đổi
Từ đồ thò ta thấy, khi U
bđ
thay đổi thì ta có những tốc độ không tải lý tưởng khác
nhau, còn độ cứng đặc tính cơ không đổi và đặc tính điều chỉnh dốc hơn đặc tính
tự nhiên.
• Nhận xét :
-
Điều chỉnh tốc độ trong bất kỳ vùng tải nào, kể cả không tải lý tưởng ,
đặc tính cơ điều chỉnh tuy mềm hơn đặc tính tự nhiên nhưng cứng hơn
phương pháp dùng biến trở và thay đổi φ
kt
-
Tốc độ lớn nhất ω
max
= ω
0
-
β
M
dm
- Điều khiển phước tạp, vốn đầu tư lớn nhưng nó là phương pháp tốt hơn so
với hai phương pháp trên
• Kết luận : Sau khi phân tích ba phương pháp điều khiển nêu trên thì phương
pháp điều khiển bằng thay đổi điện áp phần ứng là tốt hơn cả . Cho nên em
chọn phương pháp làm phương pháp nguyên cứu cho đề tài của em.
3. CÁC BỘ BIẾN ĐỔI ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ MỘT CHIỀU KÍCH
TỪ ĐỘC LẬP BẰNG THAY ĐỔI ĐIỆN ÁP PHẦN ỨNG .
- Hiện nay trong công nghiệp người ta thường sư dụng ba loại bộ biến đổi sau:
+ Bộ biến đổi máy phát điện một chiều
+ Bộ biến đổi xung áp một chiều
+ Bộ biến đổi chỉnh lưu có điều khiển
- Tương ứng với việc sử dụng các bộ biến đổi đó ta có các hệ truyền động sau:
+ Hệ máy phát – động cơ ( F – Đ )
+ Hệ điều chỉnh xung áp – động cơ ( XA – Đ )
+ Hệ chỉnh lưu Tiristo – động cơ ( T – Đ )
3.1. Hệ thống máy phát - động cơ ( F – Đ ):
Trêng §¹i Häc B¸ch Khoa Hµ Néi 12
§å ¸n tèt nghiƯp
- Sơ đồ nguyên lý:
KT
F
KT
D
R
F
ĐCSC
U
∼
F
- -
Đ
+ +
Hình 1-10 : Sơ đồ nguyên lý hệ thống F – Đ
Giả thiết ω
f
= const, sức điện động của máy phát E
f
= f( I
ktf
) theo qui luật đường
cong từ hoá, nếu coi máy phát không bão hoà thì đường đó thẳng nên.
E
f
= k
f
φ
f
ω
f
= k
f
φ
f
αI
ktf
(25)
Trong đó : k
f
=
a
PN
π
2
: Hệ số cấu trúc của máy phát
φ
f
: Từ thông kích từ máy phát
α =
I
ktf
f
∆
∆
φ
: Hệ số góc của đường đặc tính từ hoá ( xem là đường
thẳng)
I
ktf
: Dòng kích từ của máy phát
Nếu dây quấn kích từ của máy phát được cấp bởi nguồn áp lý tưởng U
kf
thì :
I
kf
=
r
U
kf
kf
Như vậy sức điện động lúc này tỷ lệ với điện áp kích thích bởi hệ số hằng số là
k
f
. Lúc này có thể coi gần đúng máy phát điện một chiều kích từ độc lập là một
bộ khuyếch đại tuyến tính.
E
f
= k
f
U
kf
-
Phương trình đặc tính cơ điện:
ω =
φ
d
d
f
k
k
U
kf
-
φ
k
R
I
ư
(26)
-
Phương trình đặc tính cơ:
ω =
φ
d
d
f
k
k
U
kf
-
)(
2
φ
d
d
R
k
M (27)
Trêng §¹i Häc B¸ch Khoa Hµ Néi 13
§å ¸n tèt nghiƯp
Với R = R
ưf
+ R
ưđ
Trong đó R
ưf
: Điện trở phần ứng của máy phát
R
ưđ
: Điện trở phần ứng của động cơ
-
Tốc độ không tải lý tưởng :
ω
0
=
φ
d
d
kff
k
Uk
= var = f(U
đk
)
- Độ cứng đặc tính cơ:
β =
RR
k
uduf
d
d
+
)(
2
φ
= const
Những biểu thức trên chứng toả rằng khi thay đổi dòng điện kích từ của máy thì
điều chỉnh được tốc độ không tải của hệ thống, còn độ cứng của đặc tính cơ thì
giữ nguyên, do đó đặc tính cơ điều chỉnh là một họ các đường thẳng song song
nhau
ω
ω< 0
KF®m
ω
ω
ω
§TTN
Hình 1-11 : Đồ thò đặc tính cơ của hệ F – Đ ứng với U
kf
thay đổi
Thông thường R
ưf
≈ R
ưđ
nên β =
2
1
β
tn
-
Nếu cho máy phát kích từ thuận U
kt
>0 thì đặc tính ở nửa trục ω>0
-
Nếu cho máy phát kích từ nghòch U
kf
<0 (đảo kích từ) thì E
f
<0 thì đặc tính
ở phía trục ω <0
-
Mỗi đặc tính cho ta một tốc độ làm việc
-
Trường hợp U
kf
=0 thì E
f
=0 động cơ làm việc ở chế độ hãm động năng.
-
Hãm tái sinh khi giảm tốc độ hoặc khi đảo chiều dòng kích từ, hãm ngược
ở cuối giai đoạn hãm tái sinh khi đảo chiều hoặc khi làm việc ổn đònh với
Trêng §¹i Häc B¸ch Khoa Hµ Néi 14
§å ¸n tèt nghiƯp
mô men tải có tính chất thế năng
• Nhận xét :
-
Ưu điểm : Hệ truyền động F – Đ có sự chuyển đổi trạng thái làm việc rất
linh hoạt, khả năng quá tải lớn, chi phí điều khiển nhỏ và điều khiển dễ
dàng, cho phép động cơ làm việc được ở cả 4 góc phần tư của mặt phẳng
đặc tính cơ.
-
Nhược điểm : Hệ F – Đ dùng nhiều máy điện quay, gây ồn , công suất lắp
đặt máy ít nhất gấp ba lần công suất của động cơ chấp hành , với đề tài
của em cho công suất động cơ là 6 kw thì công suất lắp đặ ≥18 kw. Khó
điều chỉnh tốc độ sâu vì máy phát một chiều có từ dư và dặc tính từ hoá có
từ trễ . Mặt khác hệ thống cồng kềnh, chiếm nhiều diện tích đặt ( không
kinh tế), hiệu suất của hệ thống thấp η=
P
P
vao
ra
=
codc
dckdb
dc mf
P
P
P P
+ +
= 0,3 . Vốn
đầu tư ban đầu cao
3.2. Hệ truyền động điều chỉnh xung áp – động cơ:
Bộ biến đổi xung áp là bộ nguồn điện áp dùng để điều chỉnh tốc độ động cơ
điện một chiều, phần chủ yếu của nó là bộ nguồn áp và bộ khoá điều khiển.
Sơ đồ nguyên lý và điện áp :
D
0
t
1
t
2
t
3
t
4
t
5
U
d
U
t
1
t
2
E
-
+
k I
KT
T
0
-
t
+
Hình 1-12 : Sơ đồ nguyên lý và điện áp của hệ xung áp – động cơ
Để cải thiện dòng điện phần ứng, người ta mắc thêm van đệm D
0
. Giả thiết van
đệm D
0
là van lý tưởng, nghóa là van có sụt áp thuận ∆U =0 và dòng điện ngược
I
ng
=0 , khoá k có thể là Tiristor hoặc Transistor. Đối với động cơ công suất lớn
thì phải dùng Tiristor.
Khi đóng, cắt khoá k trên phần ứng động cơ sẽ có điện áp biến đổi theo dạng
xung vuông.
Trêng §¹i Häc B¸ch Khoa Hµ Néi 15
§å ¸n tèt nghiƯp
Khi ở trạng thái dòng liên tục, giá trò trung bình của điện áp đặt lên phần ứng
của động cơ là :
U
d
=
Τ
1
∫
t
Udt
1
0
=
Τ
t
1
U =γU
Trong đó: t
1
là thời gian khoá k đóng
γ =
Τ
t
1
là độ rộng của xung áp
Như vậy, có thể coi bộ biến đổi xung đẳng trò với nguồn liên tục, có điện áp ra
U
d
= var bằng cách thay đổi độ rộng của xung áp γ. Vì thời gian một chu kỳ
đóng cắt khoá k rất nhỏ so vơi hằng số thời gian cơ học của hệ truyền động nên
ta có thể coi tốc độ và sức điện động phần ứng động cơ là không đổi trong
khoảng thời gian T
• Đặc tính của hệ điều chỉnh xung áp – động cơ.
-
Đặc tính cơ điện :
ω =
φ
γ
dm
K
U
-
φ
dm
bdu
K
RR
+
I
-
Đặc tính cơ :
ω =
φ
γ
dm
K
U
-
)(
2
φ
K
RR
dm
bdu
+
M
Khi thay đổi độ rộng xung γ ta được họ đường thẳng song song với tốc độ không
tải lý tưởng ω
0i
=
φ
γ
dm
K
U
= var và độ cứng β =
RR
bdu
dm
K
+
)
2
(
φ
= const, đồ thò đặc tính cơ
gồm hai đoạn thẳng ứng với hai chế độ dòng điện liên tục và dòng điện gián
đoạn.
Trêng §¹i Häc B¸ch Khoa Hµ Néi 16
§å ¸n tèt nghiƯp
ω
0
ω
01
ω
02
ω
03
ω
04
γ
1
γ
2
γ
3
γ
4
0
ω
γ
=0
M,(I)
γ
=1
Biên liên tục
Hình 1-13: Đồ thò đặc tính cơ của hệ xung áp – động cơ.
Vậy đặc tính sẽ không còn đúng khi dòng điện đủ nhỏ, hệ sẽ chuyển từ trạng
thái dòng liên tục sang trạng thái dòng gián đoạn .
• Nhận xét:
- Ưu điểm: + Bộ nguồn điều áp xung thường cần ít van điều khiển nên vốn đầu
tư nhỏ, hệ đơn giản, chắc chắn , dễ điều khiển
+ Độ cứng đặc tính cơ lớn
+ Khi thay khoá k bằng van có điều khiển thì có thể thiết lập
hệ tự động vòng kín
- Nhược điểm : Vì điện áp dạng xung gây tổn thất phụ khá lớn trong động cơ do
thành phần xoay chiều của dòng điện, nằm trong dải công suất nhỏ.
3.2. Hệ biến đổi van Tiristor – Động cơ (T – Đ):
• Sơ đồ nguyên lý :
U=var
U
∼
-
+
-
+
ĐK
KT
Đ
Hình 1-14 : Sơ đồ nguyên lý của hệ T – Đ
Bộ biến đổi van Tiristor là một loại nguồn điện áp một chiều, nó trực tiếp biến
Trêng §¹i Häc B¸ch Khoa Hµ Néi 17
§å ¸n tèt nghiƯp
đổi dòng xoay chiều thành dòng một chiều. Việc điều chỉnh điện áp đầu ra của
bộ biến đổi, được thực hiện bằng cách điều chỉnh góc mở α của van.
Điện áp chỉnh lưu U
d0
(điên áp không tải ở đầu ra) có dạng đập mạch với số lần
đập mạch là n trong một chu kỳ 2π của điện áp sơ cấp của máy biến áp lực.
Sơ đồ hình tia n=m với m là số pha
Sơ đồ hình cầu n=2m
Giả sử điện áp cấp cho bộ biến đổi van có dạng
U
2
= U
2m
sinωt
Ta đã biết sau một chu kỳ dòng điện và điện áp lặp lại nên ta chỉ cần xét cho
một chu kỳ là đủ, coi điện trở van R
v
=0
• Sơ đồ thay thế của mạch .
Môït bộ biến đổi van có thể bao gồm : Máy biến áp lực, tổ van , kháng lọc, thiết
bò bảo vệ và hệ thống điều khiển.
Sơ đồ thay thế có dạng sau
U
2
I
u
VAN
∼
E
R
L
Σ
Σ
Hình 1-15: Sơ đồ thay thế chỉnh lưu Tiristor – Động cơ một chiều
Khi van dẫn ta có phương trình
U
2
– E = IR
Σ
+ L
Σ
dt
dI
(28)
Với R
Σ
= R
ba
+ R
ư
+ R
kt
L
Σ
= L
ba
+ L
ư
+ L
kt
• Nhận xét :
-
Ưu điểm : Hệ (T – Đ) tác động nhanh,tổn thất năng lượng ít, kích thước và
trọng lượng nhỏ, không gây ồn và dễ tự động hóa do các van bán dẫn có
hệ số khuyếch đại lớn, điều đó rất thuận tiện cho việc thiết lập các hệ
thống tự động điều chỉnh nhiều vòng để nâng cao chất lương các đặc tính
tónh và các đặc tính động của hệ thống
Trêng §¹i Häc B¸ch Khoa Hµ Néi 18
§å ¸n tèt nghiƯp
-
Nhược điểm : Do các van bán dẫn có tính phi tuyến, dạng điện áp chỉnh
lưu ra có biên độ đập mạch cao, khả năng linh hoạt và chuyển trạng thái
làm việc không cao, khả năng quá tải về dòng và áp của van kém, chất
lượng điện áp ra không cao, gây tổn thất phụ và làm sấu điều kiện chuyển
mạch trên cổ góp
-
Khắc phục : Thiết kế truyền động van cố gắng làm hẹp vùng dòng gián
đoạn bằng cách nối kháng lọc đủ lớn, tăng số lần đập mạch, nối van đệm
• Kết luận :
Sau khi phân tích các hệ truyền động , ta nhận thấy sử dụng hệ điều chỉnh
Tiristor – Động cơ là hợp lý nhất. Tuy hệ này có những nhược điểm nhất đònh,
nhưng xét về ưu điểm thì hệ này có nhiều ưu điểm hơn, cho nên ta sẽ nghiên
cứu về các bộ nguồn chỉnh lưu Tiristor.
4. GIỚI THIỆU VỀ CÁC BỘ NGUỒN CHỈNH LƯU VÀ ĐẢO CHIỀU QUAY
TIRISTOR ĐẶC TRƯNG
4.1. Chỉnh lưu cầu một pha:
• Sơ đồ mạch điện:
L
d
U
T
1
I
d
I
TT
31
;
I
TT
42
;
F
R
d
T
3
B
T
2
T
4
A
T
1
1
∼
U
I
0
I
E
0
0
t
t
t
I
α
0
2π
π
U
3π
t
d
U
Hình 1-16: Sơ đồ nguyên lý và dạng điện áp, dòng điện tải
• Hoạt động của sơ đồ:
Nửa chu kỳ đầu khi A(+), B(-) trên T có phân cực thuận, cấp xung điều khiển
cho T
1
và T
3
ta có dòng điện chạy từ A →T
1
→E→L
d
→R
d
→F→T
3
→B. Nửa chu
kỳ sau, khi B(+), A(-) cấp xung điều khiển cho T
2
và T
4
có dòng chạy từ
B→T
2
→E→L
d
→R
d
→F→T
4
→A. Vậy ta có dòng một chiều chạy qua tải.
-
Điện áp trung bình trên tải :
Trêng §¹i Häc B¸ch Khoa Hµ Néi 19
§å ¸n tèt nghiƯp
U
d
=0,9 U
2
2
cos1
α
+
-
Dòng điện chạy qua van :
I
vtb
=
2
I
d
-
Điện áp ngược của van :
U
nv
=
2
U
2
-
Công suất máy biến áp :
S
ba
= 1,23I
d
U
d
• Nhận xét : các sơ đồ chỉnh lưu một pha cho ta điện áp với chất lượng chưa cao,
biên độ đập mạch điện áp quá lớn, thành phần sóng hài bậc cao lớn điều này
không đáp ứng được cho nhiều loại tải. Muốn có chất lượng điện áp tốt hơn
chúng ta phải sử dụng các sơ đồ có số pha nhiều hơn
4.2. Chỉnh lưu tia ba pha:
• Sơ đồ mạch điện :
T
1
T
2
T
3
E
d
L
a b
c
d
R
F
B
A
C
t
A
3
T
0
U
1
T
U
AC
U
AB
I
A
I
0
0
T
I
3
B C
I
t
B C
t
A
α
1
2
3
0
0
I
I
I
T
I
1
I
T
2
U
0
α
A
α
B
α
C
4
5
6
I
d
t
t
α
α
B
α
C
t
Hình 1-17: Sơ đồ động lực và dạng dòng, điện áp tải, dòng điện qua các
van và điện áp van phải chòu
• Hoạt động : Điện áp pha a, b, c dòch pha nhau một góc 120
0
, theo các đường
cong điện áp pha, chúng ta có điện của một pha nào dương hơn hai pha kia trong
khoảng thời gian 1/3 chu kỳ thì van đó dẫn.
Khi anode của một van nào đó dương hơn, ta cấp xung điều khiển cho van đó.
Trêng §¹i Häc B¸ch Khoa Hµ Néi 20
§å ¸n tèt nghiƯp
Thời điểm hai điện áp của hai pha giao nhau được coi là góc thông tự nhiên của
các van bán dẫn. Các Tiristor chỉ được mở thông với góc mở nhỏ nhất tại thời
điểm giao nhau của hai điện áp ( góc thông tư nhiên).
Vậy ta sẽ nhận được điện áp tải lớn nhất khi các van mở ở góc thông tự nhiên.
-
Trò số điện áp trung bình :
U
d
= 1,17 U
2f
cosα
Với U
2f
là điện áp pha thứ cấp máy biến áp
-
Điện áp ngược mà van phải chòu :
U
nv
=
6
U
2f
-
Giá trò dòng điện hiệu dụng chay qua van :
I
vhd
=
3
I
d
(với I
d
=
R
U
d
)
-
Công suất máy biến áp :
S
ba
= 1,35 U
d
I
d
• Nhận xét :
-
So với chỉnh lưu cầu một pha, thì chỉnh lưu tia ba pha có chất lượng điện
áp một chiều tốt hơn, biên độ điện áp đập mạch thấp hơn, thành phần sóng
hài bậc cao bé hơn, việc điều khiển các van bán dẫn trong trường hợp này
cũng đơn giản hơn.
-
Phía thứ cấp máy biến áp tồn tại dòng một chiều, nhờ có biến áp ba pha
ba trụ mà từ thông lõi thép biến áp là từ thông xoay chiều không đối xứng
làm cho công suất máy biến áp phải lớn.
-
Phía thứ cấp máy biến áp phải đấu sao có trung tính (Y
0
) và dây trung tính
phải có tiết diện lớn hơn dây pha . Vì dây trung tính chòu dòng điện tải
4.3. Chỉnh lưu cầu ba pha:
• Sơ đồ mạch điện .
Trêng §¹i Häc B¸ch Khoa Hµ Néi 21
§å ¸n tèt nghiƯp
a b
c
TT
1
2
F
56
d
R
L
d
T
4
T
T
3
T
A
CB
0
E
d
U
t
U
d
2
0
θ
1
θ
U
A
5
θ
3
θ θ
4
6
θ θ
7
B C
θθ
8 9
A
B C
t
Hình 1-18: Sơ đồ động lực và đường cong điện áp tải khi góc mở α=30
0
• Hoạt động : Dòng điện chạy qua tải là dòng điện chạy từ pha này về pha kia,
do đó tại mỗi thời điểm cần mở Tiristor, ta đồng thời cấp hai xung điều khiển
( một xung ở nhóm anode (+) theo sơ đồ là (T
1
,T
3
,T
5
) còn xung ở nhóm catode
(-) theo sơ đồ là ( T
2
,T
4
,T
6
)), thứ tự cấp xung điều khiển phải đúng thứ tự pha.
Khi cấp đúng xung điều khiển dòng điện sẽ chạy từ pha có điện áp dương hơn
về pha có điện áp âm hơn. Khi góc mở van nhỏ hoặc tải điện cảm lớn, trong mỗi
khoảng dẫn của một van của nhóm này (Anode hay Catode ) thì sẽ có hai van
của nhóm kia ( Catode hay Anode ) đổi chỗ cho nhau.
-
Giá trò điện áp trung bình của chỉnh lưu:
U
d
= 2,34 U
2f
cosα
-
Điện áp ngược đặt lên van :
U
nv
=
6
U
2f
với U
f
=
3
U
d
-
Giá trò hiệu dụng của dòng điện chạy qua mỗi van :
I
vhd
=
3
d
I
-
Công suất máy biến áp :
S
ba
= 1,05 U
d
I
d
Trêng §¹i Häc B¸ch Khoa Hµ Néi 22
§å ¸n tèt nghiƯp
• Nhận xét : Chỉnh lưu cầu ba pha là sơ đồ có chất lượng điện áp tốt hơn, hiệu
suất sử dụng máy biến áp cao hơn. Tuy nhiên đây cũng là sơ đồ phức tạp hơn.
• Kết luận : Sau khi đã phân tích các dạng sơ đồ chỉnh lưu như trên. Với tải là
động cơ điện một chiều kích từ độc lập công suất P
đm
= 6 (kw) không đòi hỏi cao
về chất lượng điện áp đặt vào động cơ. Cho nên để điều khiển dễ dàng và hiệu
quả kinh tế cũng như chi phí cho thiết bò điều khiển hợp lý thì em chọn sơ đồ
chỉnh lưu tia ba pha cho đề tài nghiên cứu của em.
4.4. CHỈNH LƯU ĐẢO CHIỀU QUAY
4.4.1. Khái quát chung:
Chiều quay của động cơ điện một chiều phụ thuộc vào chiều của mô men, để
thay đổi chiều của mô men ta có thể dùng hai phương pháp sau.
-
Đổi chiều quay bằng cách đổi chiều dòng điện trong phần ứng
-
Đổi chiều quay bằng cách đổi chiều từ thông, cụ thể là chiều dòng điện
kích từ.
Đổi chiều quay của động cơ điện lúc đang quay về nguyên tắc cũng có thể thực
hiện được bằng cả hai phương pháp trên, tuy nhiên trên thực tế chỉ được dùng
phương pháp đổi chiều dòng điện phần ứng I
ư
, còn phương pháp đổi chiều quay
động cơ bằng cách đổi chiều dòng kích từ không được sử dụng vì cuộn kích từ
có nhiều vòng dây do đó hệ số tự cảm L
t
rất lớn và việc thay đổi chiều dòng
điện kích từ dẫn đến sự xuất hiện sức điện động tự cảm rất cao, gây quá điện áp
đánh thủng cách điện của dây quấn kích thích . Ngoài ra, dùng phương pháp đảo
chiều từ thông thì khi từ thông qua trò số không có thể làm tốc dộ tăng quá,
không tốt.
Ta có đặc tính cơ của động cơ khi đảo chiều quay :
0
M
ω
ω
0
ω
ω
0
ω
-
Hình1-19 : Đặc tính cơ của động cơ điện một chiều kích từ độc lập khi đảo
chiều quay
4.4.2. Sơ đồ nguyên lý bộ chỉnh lưu đảo chiều quay:
Các bộ chỉnh lưu đảo chiều quay là các bộ chỉnh lưu dùng cho các động cơ điện
Trêng §¹i Häc B¸ch Khoa Hµ Néi 23
§å ¸n tèt nghiƯp
một chiều có đảo chiều quay vì hệ truyền động T – Đ đảo chiều có yêu cầu an
toàn cao và có lôgíc điều khiển chặt chẽ. Như đã phân tích ở trên, trong thực tế
đảo chiều quay của động cơ chỉ được dùng phương pháp đổi chiều dòng điện
phần ứng bằng cách ghép hai bộ chỉnh lưu theo sơ đồ mắc song song ngược cực
tính.
Sơ đồ mạch điện :
cb2
CK
T
6
T
5
T
4
a
A
1
CK
cb1
T
3
T
2
Đ
b
c
T
CB
Hình 1-20 : Sơ đồ nguyên lý chỉnh lưu đảo chiều mắc song song ngươc
Vì sơ đồ có sử dụng hai bộ chỉnh lưu Tiristor có điều khiển nên để điều khiển
hai bộ chỉnh lưu này, có thể dùng phương pháp điều khiển chung hoặc dùng
phương pháp điều khiển riêng. Sau đây ta nghiên cứu từng phương pháp một.
a. Phương pháp điều khiển riêng:
• Nguyên lý : Trong phương pháp này, khi xung điều khiển được cấp cho bộ
chỉnh lưu này thì bộ kia không được cấp xung điều khiển
-
Ưu điểm : Làm việc an toàn, không có dòng điện cân bằng chạy qua các
van.
-
Nhược điểm : Có thời gian trễ khi điều khiển bộ này sang bộ kia do đó
dòng điện động cơ bằng không, mạch điều khiển phức tạp hơn
b. Phương pháp điều khiển chung:
Trêng §¹i Häc B¸ch Khoa Hµ Néi 24
§å ¸n tèt nghiƯp
• Nguyên lý : Xung điều khiển được cấp đồng thời cho cả hai bộ chỉnh lưu
nhưng phải đảm bảo một bộ làm việc ở chế độ chỉnh lưu, còn bộ kia làm việc ở
chế độ nghòch lưu và điện áp chỉnh lưu trung bình của của hai bộ chỉnh lưu là
như nhau. Do vậy, với các cuộn dây động cơ có tính chất cảm kháng lớn thì dòng
điện tải là liên tục, ta có.
U
0
cosα
I
= -U
0
cosα
II
Từ đó suy ra quy luật của góc điều khiển của phương pháp điều khiển chung là
phải đảm bảo:
cosα
I
= - cosα
II
hay α
I
+ α
II
= 180
0
= π
• Nhận xét :
-
Ưu điểm : Tác động nhanh, không cần thời gian trễ, mạch điều khiển đơn
giản hơn.
-
Nhược điểm : Có những khoảng thời gian ngắn, trong đó Tiristos của hai
nhóm cùng thông dẫn đến ngắn mạch giữa hai pha tương ứng .
-
Để hạn chế ảnh hưởng của dòng điện này ta phải dùng thêm cuộn kháng
cân bằng CK
cbI
và CK
cbII
• Kết luận : Sau khi đã phân tích hai phương pháp điều khiển trên, trong mỗi
phương pháp đều có ưu và nhược điểm riêng. Vì vậy em chọn phương pháp điều
khiển chung làm phương pháp cho đề tài nghiên cứu của em.
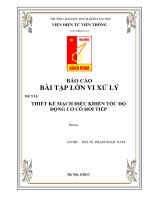
CHƯƠNG II
THIẾT KẾ TÍNH CHỌN MẠCH ĐỘNG LỰC
I. Chọn mạch động lực:
Trêng §¹i Häc B¸ch Khoa Hµ Néi 25