Thiết kế robot vệ sinh mặt hồ sử dụng năng lượng mặt trời
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (5.65 MB, 114 trang )
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
iv
TÓM TẮT LUẬN VĂN
Lun t k robot v sinh mt h s dng mt tri. Robot c
thit k nhm thc thi công vic v sinh mt h thng chp hành ca robot
gm gung gt thu rác, gung gc, bánh xe và chân vt chuyng
robot, pin Mt Tri u có chung h thu khin. Robot ch yuhong
các b n, b ch v công ci c b
c sp xp và b thit k. Robot di chuyn trên mc nh
phao, gung gc có tác dng thu gom rác và kéo robot di chuyn, gung gt
phía sau có tác dy robot di chuyn ng th
không b kt rácc b trí 4 bánh xe nhm chp thân robot vào
thành b chuya b
Phía sau c lt h th chuyc
t cm bin quang nhm phát hin vc ln.Phía trên thân
t cm bin quang tr robot nhn bit ban ngày - u này giúp
robot chn ch hot ng khi làm vic. Tm pin Mt Trt trên thân robot
nhm cung cng cho robot hong.Ngoài ra, chúng ta có th dùng b
u khin t u khin robot thông qua kt ni không dây bng sóng RF.
ng du khin PIC 18F4431 làm b x u khin các
hong ca robot. Lu khin robot bng ngô ng C vi trình biên dch
PIC C Compiler.Kim tra kt qu thc nghim robot thc hin công vic các
yêu ct ra.
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
v
ABSTRACT
Dissertation on designing robotic pool cleaner using the solar power. Robotic is
designed to carry out the work pool cleaning, system of robotic includes front
paddlewheel, rear paddlewheel, bumper wheels, screw propeller, solar panels but
share of control system. Robotic primarily operates in homes, hotels, public pools, etc.
with dimension pool is sorted and arranged according to the diagram designer.
Robotic moves on surface water by float; Front paddlewheel collect leaves, dust,
pollen, etc. and propulsion; Rear paddlewheel of robotic is for propulsion and help the
unit the reverse to back away from the obstacle; 4 corners of robotic is placed 4
bumper wheels, thing is going to follow the edge of the pool, any time the unit
collides with a wall of the pool and they are particularly good at casing the vessle to
do a hard right or a hard left turn each time it encounters a wall of the pool, casing the
vessle to quickly maneuver out of corners and around obstacles.Behind the robotic is
placed a screw propeller to change way of the unit. In front of the robotic is placed an
optical sensor to detect the things large. Top site of the unit is placed a resistance
optical detector to identify light or dark and the thing help it to choose mode when the
unit works. The solar panels are placed on top site of the robotic is feeding source
power to the unit. Also, we can use the remote to control the robotic via wireless
connection using RF waves.
PIC 18F4431 microcontroller applications central processor to control the
operation of the robotic.Robotic controller programming in C language with the PIC C
compiler. The experimental results robots do the work to achieve the requirements set
out.
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
vi
MỤC LỤC
Trang tựa Trang
Quy tài
Lý lch cá nhân i
L ii
Li c iii
Tóm tt lu iv
Mc lc vi
Danh sách các hình x
Danh sách các bng xiii
NG QUAN
1.1.Tng quan chung v c nghiên cu, các kt qu nghiên cu trong và ngoài
1
1.1.1.Gii thiu chung v c nghiên cu 1
1.1.2.Phân loi robot 2
1.1.3.Mt s du khin 5
1.1.4.Các kt qu nghiên c 5
1.2.Mc tiêu, khách th ng nghiên cu c tài 11
1.3.Nhim v c tài và phm vi nghiên cu 11
u 12
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
vii
LÝ THUYT
u kin nh ca vt ni trong cht lng 13
nh lut Archimede 13
u kin nh ca vt rn ngp trong cht lng 13
2.2 Thit k u thu gom rác 14
2.2.1 Các nguyên lý thu gom rác 14
2.2.2 Lng lên vt ngp trong cht lng chuyng 17
ng hc 19
2.3.
20
2.3.1.
20
2.3.2. 20
u khin 24
2.4.1.Gii thiu v u khin PIC 18F4431 24
2.4.2 Cha tng chân 25
2.4.3 Ngt (interrupts) 27
2.5 Lý thuyt v phn mm u khin robot 27
2.5.1 Các khâu chính trong quá trình hong ca robot 27
u khin 28
ng 3: THIT K U KHIN CHO ROBOT
3.1 Thit k 31
phao di chuyn 32
3.1.2 Áp lc thng ca phao robot và chuyng ma sát
t phng ca thân robot 33
u thu rác ca Robot 35
3.1.4 Tính toán công sut ca gung cánh gt 36
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
viii
3.1.5 Tính toán lng lên bánh lái và moment ca trc bánh lái 41
3.1.6 Phng bánh lái ca robot s dng vitme c 44
3.1.7 B phng và chng va chm ca robot s dng bánh xe cao su
49
3.2 Thit k b u khin và lp trình cho robot 50
3.2.1 phn cng 50
3.2.2 Lu khin robot 61
3.3 Tính toán din tích pin mt tri và kh ca acquy 64
3.3.1 Di
64
3.3.2 Kh ca Acquy 65
h thng pin Mt Tri 65
T QU
4.1 Kt c 66
phao di chuyn 66
4.1.2 Gung cánh gt thu rác 66
4.1.3 Gung cánh gc 67
4.1.4 Bánh lái 68
4.1.5 Bánh xe chuyng 68
4.1.6 Khay cha rác 69
4.2 Mch u khin s dng trong robot 70
4.2.1 Mu khin robot 70
4.2.2 Khng lc 70
4.2.3 Cm bin IR 70
4.2.4 Cm bin quang tr 71
4.2.5 B u khin RF 72
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
ix
c tin hành thc nghim 73
T LUNG PHÁT TRIN
5.1 Kt lun 76
ng phát tri 76
TÀI LIU THAM KHO 78
PH LC 79
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
x
DANH SÁCH CÁC HÌNH
HÌNH TRANG
Hình 1.1 ng vt 2
Hình 1.2 Robot trên không 3
Hình 1.3 c 3
Hình 1.4 Robot di chuyn bng dng bánh xích hong 4
Hình 1.5 - 5
Hình 1.6 - 6
Hình 1.7 - iRobot Verro 500 PowerScrub 7
Hình 1.8 - Swimming pool cleaning robots Surrey 7
Hình 1.9 - Solar Breeze Robot 8
Hình 1.10 - B ch v- 9
Hình 2.1 Các trng thái ca vt trong cht lng 13
Hình 2.2 V y Archimede và tâm khi ca vt 14
Hình 2.3 - u gom rác theo nguyên lý nht rác 15
Hình 2.4 - u gom rác theo nguyên lý cào rác 16
Hình 2.5 - u gom rác theo nguyên lý
a 17
Hình 2.6 lc tác dng lên vt ngp trong cht lng 17
Hình 2.7 ng hc 19
2.8
20
2.9 -
(a)
t Tri (b) 21
2.10 -
23
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
xi
Hình 2.11 - cha PIC 18F4431 25
Hình 2.12 - cu trúc hong ca robot 28
Hình 2.13 - u khin chu k xung PWM 29
Hình 3.1 Không gian làm vic ca Robot 31
Hình 3.2 - lc tác d phao robot 32
Hình 3.3 - lc robot 33
Hình 3.4 chuyng masát t và thành bên robot 34
Hình 3.5- u thu rác ca Robot 35
Hình 3.6 phao ca robot 35
Hình 3.7 lc tác dng lên bánh lái 41
Hình 3.8 - th nh các h s lc và moment thng trên bánh lái 42
Hình 3.9 ng bánh lái ca robot 44
Hình 3.10 Bánh xe chuyng và chng va chm ca robot 48
Hình 3.11 Khay cha rác 49
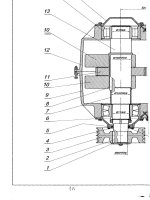
Hình 3.12 Mô hình thit k c lp ráp 49
Hình 3.13 - khi hong ca robot 50
Hình 3.14 nguyên lý mu khin chính PIC18F4431 51
Hình 3.15 nguyên lý mu khin PIC16F887 52
u khin phát tín hiu)
Hình 3.16 nguyên lý mu khin PIC16F887 53
u khin nhn tín hiu)
Hình 3.17 nguyên lý mch kim tra dòng áp 54
Hình 3.18 nguyên lý mch hin th u khin 54
Hình 3.19 nguyên lý mng thái 54
Hình 3.20 - nguyên lý mng lc ca robot 55
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
xii
Hình 3.21 nguyên lý mch thu phát cm bin IR loi 1 56
Hình 3.22 nguyên lý mch thu phát cm bin IR loi 2 56
Hình 3.23 nguyên lý mch phát hin vt cn 57
Hình 3.24 nguyên lý mch cm bin quang tr 57
Hình 3.25 nguyên lý mch thu phát nRF24L01+ 58
Hình 3.26 khi ca nRF24L01+ 59
Hình 3.27 chân nRF24L01+ 60
Hình 3.28 gii thu 61
Hình 3.29 khi h thng pin Mt Tri 65
Hình 4.1 Gung cánh gt thu rác 67
Hình 4.2 gung cánh gc 67
Hình 4.3 u bánh lái 68
Hình 4.4 Bánh xe chuyng 69
Hình 4.5 - Khay cha rác 69
Hình 4.6 Mu khin ca robot 70
Hình 4.7 Cm bin IR (hng ngoi) 71
Hình 4.8 Cm bin quang tr 71
Hình 4.9 B thu phát RF 72
Hình 4.10 Pin Mt Tri 72
Hình 4.11 c thc hin thu gom rác ca robot 74
THIẾT KẾ ROBOT VỆ SINH MẶT HỒ SỬ DỤNG NĂNG LƯỢNG MẶT TRỜI
GVHD: TS. HUỲNH NGUYỄN HOÀNG HVTH: NGUYỄN DUY UY
xiii
DANH SÁCH CÁC BNG
BNG TRANG
Bng 3.1 - Bng tính lng lên bánh lái và moment ca trc bánh lái 43
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
1
Chngă1
TNG QUAN
1.1.Tng quan chung v lĩnhăvực nghiên cứu, các kt qu nghiên cứu trong và
ngoƠiăncăđƣăcôngăb:
1.1.1.Gii thiu chung v lĩnhăvực nghiên cứu
Robot c ti a th k c
ng dng trong ngành công nghip vào nh thay th i làm các
công vic nng nhc, nguy hic hi. Do nhu cu cn hòa nhp
ngày càng nhiu vi quá trình sn xut phc tp nên robot cn có nhng kh
thích ng linh hong ng dng trong ch
to máy thì các ng dng trong y tc khe, nông nghi
dng, an ninh quó nhu cng lc cho các robot
a hình và robot dch v phát trin.
Hình du tiên xut hin M, là loi robot tay máy chép hình dùng
trong phòng thí nghim vt liu phóng x. Vào nh k c, bên cnh
u m là
thiu s ng. Các tay máy c nh ch hong trong mt không gian b gii hn
quanh v trí cc li, mobile robot là long có th di chuyn t
không gian này ti không gian khác mc lu khin t
to nên không gian hong linh hot và l
Mc dù v cu trúc ca các lou hin
ng v các ng dng dch v và hong cng
t nhiên. Vi s phát trin ca xã hi và quá trình hii hóa c phát trin
thì nhiu dch v mm v robot t robot phc
v công nghip sang robot phc v cho các nhu cu xã hi và nhu cu cá nhân ca con
i.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
2
1.1.2.Phân loi robot
Trong công nghii ta s dng nhn nht ca
giúp cho vic phân loc d dàng. Có 4 yu t phân loi
Theo hình dng hình hc ca không gian hong, theo th h robot, theo b
u khin, theo ngun dng. Tuy nhiên trong gii hn c tài này ch cp
c nghiên cng dùng trong phc vng là mt h
robot có kh c hin các nhim v nhiu v trí khác nhau vi kh ch
chuyn bng bánh xe, xích hay bng chân ph thui vi robot di
chuyc hay trên không ta ct, gung cánh
gt, chân vn l to chuyng cho robot. Kh ng
làm robot có nhiu ng di phi gii quyt nhiu v mi. Mt trong
nhng v chung cn nghiên cu các long là kh nh
ng ca robot.
ng có th phân loi bng các cách:
Phân long mà chúng di chuyn:
Robot ngoài tri và robot trc lp bánh
i robot có chân (gm 2 hoc nhi
i, robot hình dng vt hoc côn trùng.
Hình 1.1 – Robot hình ngời và hình dáng động vật
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
3
ng dùng cho
tii lái.
Hình 1.2 – Robot trên không
n hoc, chúng
hoc lp.
Hình 1.3 – Robot dới nớc
Phân lon:
Robot có chân, chân gii hay chân ging vt.
- m ln nht ca loi robot này là có th thích nghi và di chuyn
a hình g gha chúng còn có th ng vt cn
, vt nt sâu mt cách d dàng.
- m chính ca loi robot này chính là ch to quá phc tp.
Chân robot là kt cu nhiu bc t ng
ng cng thi gim t di chuyn. Các k m,
nm hay nâng tm t cng vng ca
robot. Robot loi này càng linh hot thì chi phí ch to càng cao.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
4
Robot di chuyn bng bánh xe.
Hình 1.4 – Robot di chuyển bằng dạng bánh xích hoặc bánh đa hớng
u chuyc s dng rng rãi nht trong công
ngh robot t hành. Các loi bánh xe có bn:
+ Bánh xe tiêu chun: 2 bc t do, có th quay quanh trc bánh xe và
m tip xúc.
+ Bánh lái: 2 bc t do, có th quay xung quanh khp lái.
+ Bánh Sweddish: 3 bc t do, có th ng thi xung quanh trc
bánh xe, trc m tip xúc.
Robot di chuyn bng bánh xe kiu gung gc và h thng chân vt.
Loi bánh xe này dùng cho robot di chuyn trên mc
ng bng h thng chân vt, khi di chuyc thì viu
khin rt khó chính xác do lc quán tính.
Robot di chuyn bng bánh xích.
Loi robot này chuyng bng các bánh có l
rt phù hp khi di chuya hình phc t ng nó có th
i t quay ca 2 bánh xích ch ng. Tuy nhiên, do chuyn
ng bng s xy ra hiu
khin chính xác. Mt s v na là loi robot này rt d làm hng b
mt ca nnc bit là khi chuyng.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
5
1.1.3.Mt s dngăđiu khin
u khin t xa bng tay vi các b phn có cu khin hoc nhng
thit b u khin khác. Thit b u khin có th c gn trc tip vào trong robot.
u khiu t xa t bo v có kh n và tránh nhng
ngi vu khiu khin t xa bng tay. Có rt ít
robot ch b u khin t xa t bo v.
Mt vài robot t u tiên là nhng robot theo l trình. Chúng có th theo
nhc trên sàn, tr robot này hong theo mt thut
n là gi l trình trong b x lý trung tâm, chúng không th
ng ngi vt, chúng ch dng li khi có vng chúng. Rt nhiu
mu ca loi robot này vc bày bán bi FMC, EGEMIN,
Robot hoc lp vi nhng chuyng ngu nhiên, v
nhng chuyy bng, nhng bc cm nhn do
s cn tr v mt vi Roomba, hoc vi b cm bin t
máy ct c Friendly Robotic.
1.1.4.Các kt qu nghiên cứuătrongăvƠăngoƠiăncăđƣăcôngăb
tài ch tp trung nghiên cu robot v sinh b nên trong phn này ch
gii thiu các nghiên cn robot v sinh b
Mtăsănghiênăcứu ătrongănc:
-Robot vệ sinh đáy hồ:
Hình 1.5 - Robot làm sạch hồ bơi
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
6
vào
2
Nguồn [Báo ngời lao động-Khoahoc.com.vn]
-Robot vệ sinh mặt hồ:
Hình 1.6 - Mô hình máy dọn rác trên mặt nớc
Mô hình này
-
Máy hong da theo nguyên lí to l c và rác vào
trong khoang cha nh h thng xon c, t c gi li khoang cha,
ng thy ra sau thân máy.
Nguồn [Báo mới-Baomoi.com]
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
7
Mtăsănghiênăc
uăăngoƠiănc:
-Robot vệ sinh đáy hồ:
Robot: iRobot Verro 500 PowerScrub
.
iRobot Verro 500 PowerScrub
-
-
-
-
-
Hình 1.7 - iRobot Verro 500 PowerScrub - Nguồn [iRobot]
Robot: Swimming pool cleaning robots ậ Surrey
Hình 1.8 - Swimming pool cleaning robots – Surrey
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
8
Robot
[Nguồn: Desjoyaux Pools]
-Robot vệ sinh mặt hồ:
RobotălƠmăschăhăbiăsădngănĕngălngămtătriăậ Solar Breeze.
Hình 1.9 - Solar Breeze Robot
Vi robot này, bn s tit kim rt nhiu thng và tin bc. Solar-
Breeze s t ng di chuyn xung quanh h i b 90-95% các tt c các
cht bn, bao gm c lá, phn hoa, bi và các loi du chng nng ngay t mc
c khi các cht bn này chìm xu-Breeze không cn dây, ng hoc
các thit b n, bn ch ct Solar-Breeze trong h n
sang ch hong c ngày dài mà không tn nhi
robot này trc tip ly ngung trong thiên nhiên là ánh sáng mt tr
kèm vi Solar-Breeze là mt pin s ng ban
có th hoc vài gi
[Nguồn: Solar Breeze]
-u điểm
:
-Nhợc điểm
: Giá thành cao.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
9
Kê
tăluơ
̣
n:
.
Tính cấp thit củaăđ tài
:
li là hong th thao thích thú và b ích nh
th y b, chy xe, nâng t hoc các hong khác, bi
môn này rng cho mi la tui hoc th tri giúp làm chc khe toàn
thân, làm du tâm trí, kích thích tup.
Hình 1.10 - Bể bơi dịch vụ Bể bơi gia đình
i mang li cho chúng ta 6 tác dng có l:
- Phòng tr bnh béo phì
- Phòng tr viêm khp
- Có li cho hô hp
- Tt cho tun hoàn máu
- Phòng tr mt ng hoc chng suy nhc thn kinh
- Phòng tr bch
Bên cnh nhng mt li mà b i cho chúng ta thì nó luôn tn ti
nhng mt hi mà chúng ta không bing vi khun gây b to ra
mt khuôn viên b ng các b
c thit k bên ngoài tri và xung quanh tru này
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
10
làm cho b i bng mt h. m bo cho
h c sch thì chúng ta phi thu dn rác hoc chúng ta phi mt
nhiu th thu dn rác.
Mt s loi rác trên h ng gi lá cây, các
loi bi bn, các loi rác sinh ho
.
ụănghĩaăkhoaăhọc và thực tin
ụănghĩaăkhoaăhọc:
Thităk Robot văsinhămt hô
s
̉
ădu
̣
ngănĕngăl
̣
ngămĕ
̣
tă
tr
i
ụănghĩaăthựcătin:
v sinh b ch v chúng ta phi tn nhi mua
các dng c làm v sinh, phng, phi tn nhiu th làm nhng
công vic này. Vi vic s d thay th hoc h tr i, s
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
11
tit kim rt nhiu thng và tin bc. Nha robot là
robot s t ng di chuyn xung quanh h i b các cht bn, bao gm c
lá, phn hoa, bi và các loi du chng nng ngay t mc khi các cht bn
này chìm xu không cn dây, ng hoc các thit b Robot s hong
c ngày dài mà không tn nhi robot này trc tip ly ngu
ng ánh sáng mt tri, i kèm vi r
có th hoc vài gi
1.2.Mc tiêu, khách th vƠăđiătng nghiên cứu củaăđ tài
Mc tiêu củaăđ tài: thit k và ch to robot ng dng trong vic v sinh b
ch v s dng mt tri.
Khách th vƠăđiătng nghiên cứu củaăđ tài: la chn mô hình và gii pháp
u khin cho robot, ngung s dng, di chuyn t u khin t
xa.
1.3.Nhim v củaăđ tài và phm vi nghiên cứu.
Nhim v củaăđ tài: thit k và ch to mô hình robot v sinh mt h s dng
ng mt tri bao gm:
- Phm có:
+ Thit k, ch to phn phao ni cho robot
+ Thit k, ch to phu thu gom rác
+ Thit k, ch to phng cho robot.
- Phu khin gm có:
+ La chn ngung.
+ Thit k mu khin cho robot.
+ Thit k mu khin t xa.
+ Xây d gii thut cho robot.
+ L robot thc hin công vic thu gom rác.
Gii hn củaăđ tài: Kh t cng theo hình
xon thu rác có th c.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
12
Phm vi nghiên cứu: tài tp trung nghiên cu, thit k và ch to robot v
sinh mt h s dng mt tr phc v cho h
h ch v. Các công vic tính toán và ch tc trin khai chi tit.
1.4.Phngăphápănghiênăcứu
c các m u s tp trung
gii quyt các v
Xây dng mô hình lý thuyt bao gm:
Thu thp và nghiên cu các tài liu liên quan v các mô hình
Tìm hiu và ng dng PIC 18F4431, làm b x lý trung tâm cho robot
Nghiên cu gii thu u khin robot.
Xây dng mô hình thc nghim bao gm:
Thit k, ch to mô hình phn phao nu thu rác, khay cha rác,
ng (bánh lái).
Thit k mu khin
Xây d gii thut và lu khin robot.
Ngung Pin Mt Tri và Acquy d tr cho robot.
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
13
Chngă2
CăS LÝ THUYT
2.1.Điu kin năđịnh của vt ni trong chất lỏng:
2.1.1.Định lut Archimede:
Mt vt ngp trong cht lng chu mt ly ca cht lng thng
t i lên trên. Lc này có tr s bng trng ca khi cht lng mà vt chim
ch và ng tâm ca khi cht lgi là ly Archimede.
P = V
C
[2.43] sách [5]
C
th tích khi cht lng b vt chim ch.
- trng riêng ca cht lng.
Gi V là th tích ca vt,
*
là trng riêng ca vt, P là ly Archimede,
là trng riêng ca cht lngy khi ngp trong cht lng
thng tng hp lc tác dng lên vt s là:
G P = V(
*
- ) [3.1] sách [7]
*
V là trng ca vt.
2.1.2.Điu kin năđịnh của vt rắn ngp trong chất lỏng:
T h thc: G P = V(
*
- ), ta thy có ba trng thái ca vt rn trong cht lng:
Nu
*
> , G > P, trng ca vt rn ln
y Archimede nên vt b chìm xu
Nu
*
= , G = P, ng hp này vt
nc.
Nu
*
< , G < P, ng hp này vt có mt
phn ni lên trên mc, th tích khi cht lng
choán ch b gic Archimede gim.
Hình 2.1 – các trạng thái ca vật trong chất lỏng
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
14
Mt vt rn ngp trong cht l chu hai lc tác dng: l y
ng t y D và trng ca vt ti khi tâm C
ca vt có ching xung.
a) b) c)
Hình 2.2 – vị trí tâm đẩy Archimede và tâm khối ca vật.
- Khi C ni D (hình 2.2.a), nu ta dch vt ra khi v trí cân bng thì P và
G s to nên mt ngu lc làm vt quay li v trí cân bng thái này gi là
cân bng nh.
- Khi C nb), vt s ng yên khi C và D cùng trên mt
ng thng. Nu vch ra khi v trí y thì P và G s to ra mt ngu lc làm
cho vt quay ti khi C và D cùng nm trên mng thi
D: vt cân bng không nh.
- Khi C và D trùng nhau (hình 2.2.c), vt cân bnh vì nó s cân bng
bt k v trí nào.
vt nc cân bng thì cng tác dng ca trng lc và lc ni phi
trùng nhau. Nu t trng thái cân bng mng nh vt chuyng
tr lc cân bng thì s cân bc gi là cân bng u
kin cân bng nh d thy là v trí trng tâm ca vt th y (v trí
t lc Archimede).
2.2 Thit k cácăcăcấu thu gom rác:
2.2.1 Các nguyên lý thu gom rác:
[Theo Tạp Chí Khoa Học Và Công Nghệ, Đại học Đà Nẵng-Số 2(43).2011]
THIT K ROBOT V SINH MT H S DNGăNĔNGăLNG MT TRI
GVHD: TS. HUỲNH NGUYN HOÀNG HVTH: NGUYN DUY UY
15
kho sát hong thu gom rác thi ca công nhân trên bãi bin và
kho sát s thu gom rác ca các máy trên bãi bic 03 nguyên lý thu
gom rác thi và thit k u thu gom rác thi :
Nguyên lý th nht là nhặt rác đa vào thùng cha. Mô phng hong ca
tay công nhân nht rác, hoc dùng các móc nht rác b vào thùng cha. Các máy hot
ng theo nguyên lý này làm vic v tin ct thu gom rác cao, cát
không lc nh và trung bình.
nguyên lý
:
Hình 2.3A Hình 2.3B
Hình 2.3 - Cơ cấu gom rác theo nguyên lý nhặt rác.
u thu gom rác trên hình 2.3A, các móc trên lô quay nht rác b
ti chuyn rác vào thùng cha, mc l ng bãi bin.
Vn tc vòng tc chn trong khon 3,0 m/s. Vn tc
vn chuyn rác ca xích tc chn trong khon 1,5 m/s. Góc nghiêng
ca xích so vm ngang ly trong khong 10
0
n 15
0
.
u thu rác trên hình 2.3B c gn trên các thanh ngang, các
thanh gn lên xích ti to thành mt h thng móc. Khi xích ti chuyng, các móc
nht rác, gi rác và vào thùng cha. Vn tc chuyng ca dây xích tc
chn trong khong t n 2,4 m/s. Góc nghiêng ca xích ti so v
nm nagng có th ln 30
0
.
Nguyên lý th hai là cào rác dồn vào thùng rác. Mô phng hong công nhân
dùng các ba cào cào rác d bc vào thùng cha. Các máy hong
ng có cát l
khng phi chuyên chc nh
hoc quá ln.