Bài tập Tổng hợp hệ điện cơ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (167.19 KB, 9 trang )
Bài tập chương
Tổng hợp hệ điện cơ
Chương 1
Các nguyên tắc cơ bản xây dựng hệ thống điều chỉnh tự động truyền động điện
Bài 1.
Cho hệ thống điều khiển có hàm truyền hệ hở là
F0 ( p ) =
K ( E + F . p)
và có phản hồi âm với hệ số phản hồi bằng 1
( A + B. p )(C + D. p)
a) Xác định các hệ số sai lệch tĩnh, sai lệch tốc độ và gia tốc.
b) Cho tín hiệu vào là r(t)=R0. Hãy tính sai lệch tĩnh của hệ (e∞).
Thamsố
K
A
B
C
D
E
F
R0
10
20
30
40
50
60
70
80
80
40
2
4
6
8
10
7
5
3
2
1
1
3
5
7
9
11
13
15
16
17
20
30
50
150
18
0,22
0,26
0,3
0,32
0,34
4
5
6
9
11
13
1
2
3
6
20
30
35
38
40
42
52
54
56
58
1
2
3
4
5
6
7
8
8
9
Thứ
Từ
1
2
3
4
5
6
7
8
9
10
10
16
17
19
20
21
22
31
32
34
Bài 2.
Cho hệ thống điều khiển có hàm truyền hệ hở là
F0 ( p) =
K ( E + F . p)
và có phản hồi âm với hệ số phản hồi bằng 1
p( A + B. p)(C + D. p)
a)Xác định các hệ số sai lệch tĩnh, sai lệch tốc độ và gia tốc.
b) Cho tín hiệu vào là r(t)=R0+R1.t. Hãy tính sai lệch tĩnh của hệ e∞.
Thamsố
Thứ
Từ
K
A
B
C
D
E
F
R0
R1
1
2
3
4
5
6
7
8
9
10
10
16
17
19
20
21
22
31
32
34
10
20
30
40
50
60
70
80
80
40
2
4
6
8
10
7
5
3
2
1
1
3
5
7
9
11
13
15
16
17
20
30
50
150
18
0,22
0,26
0,3
0,32
0,34
4
5
6
9
11
13
1
2
3
6
20
30
35
38
40
42
52
54
56
58
1
2
3
4
5
6
7
8
8
9
2
1
2
3
4
6
7
5
4
3
Bài 3.
Cho hệ thống điều khiển có hàm truyền hệ hở là
F0 ( p) =
K
( A + Bp)(C + Dp ) p 2
a) Xác định các hệ số sai lệch tĩnh, sai lệch tốc độ và gia tốc.
b) Cho tín hiệu vào là r(t)=R0+R1.t+ R2.t2 . Hãy tính tín hiệu sai lệch tĩnh e∞.
Thamsố
K
A
B
C
D
R0
R1
R2
20
30
50
150
18
0,22
0,26
0,3
0,32
0,34
4
5
6
9
11
13
1
2
3
6
2
3
3,5
3,8
4
4
5
4
6
8
1
2
3
4
5
6
7
8
8
9
Thứ
Từ
1
20
10
1
1
2
25
20
2
3
3
27
30
3
5
4
29
40
4
7
5
30
50
5
9
6
35
60
6
11
7
39
70
5
13
8
31
80
3
15
9
32
80
2
16
10
40
40
1
17
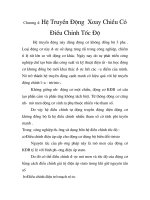
Bài 4.
Cho hệ thống có cấu trúc như hình bên.
(Tham số giống bài 2)
a)Tìm các hệ số sai lệch tĩnh, tốc độ và gia
tốc của hệ.
b)cho tín hiệu Uđ=R0. Hãy xác định sai lệch
tĩnh của hệ e∞.
e
Uđ
(-)
A + Bp
Ur
(C + Dp )( E + Fp)
1
Bài 5.
Trình bày phương pháp áp dụng tiêu chuẩn mô đun tối ưu để tổng hợp mạch
vòng điều chỉnh
Áp dụng tổng hợp mạch vòng điều chỉnh cho hệ có hàm hở
F0 ( p) =
K ( E + F . p)
( Tham số bài 1)
( A + B. p)(C + D. p)
Bài 6.
Trình bày phương pháp để áp dụng tiêu chuẩn tối ưu đối xứng khi tổng hợp
mạch vòng điều chỉnh. Cho hệ hở có hàm truyền như sau. Tìm bộ điều chỉnh
theo tiêu chuẩn đối xứng.
F0 ( p) =
K ( E + F . p)
Tham số như Bài 1.
( A + B. p )(C + D. p ) p 2
Cho hệ thống điều khiển có hàm truyền hệ hở là
Bài 7.
Cho hệ thống điều chỉnh tự động có sơ đồ cấu trúc như sau. Trong đó Uđ, Ur và
N tương ứng là tín hiệu đặt, tín hiệu ra và tín hiệu nhiễu. Các hằng số thời gian
T1
Uđ
R(p)
(-)
K
(1 + T1 p )(1 + T2 P)
Ur
(-)
a)Tìm các hệ số sai lệch tĩnh, tốc độ và gia tốc của hệ theo các tham số K, T1 T2
khi R(p)=1, N=0.
b)Áp dụng tiêu chuẩn mô đun tối ưu tổng hợp bộ điều chỉnh R(p) theo tín hiệu
nhiễu N.
11. Hệ điều chỉnh tự động truyền động điện gồm các thiết bị trong bảng sau
TT Pđm
Uđm(V) Iđm(A) nđm(V/p) Lư(mH) J(Nm2)
(kW)
1
10
110
100
500
20
Tb
(mômen
quán
tính)
1
0,5
Kb Ki
V/A
Ti
(s)
10 0,01
0,01
2
3
4
5
6
7
8
9
10
75
20,5
1,5
4,2
7
95
12
25
50
440
440
220
220
220
220
220
220
440
194
55
8,31
20
37,5
470
64
128
134
1000
1000
1500
500
1180
500
685
3000
600
500
45
15
18
40
1000
370
700
900
5
2,5
0,7
0,9
0,5
20
1,3
2.5
11.5
0,5
0,6
0,3
0,5
0,34
0,33
0,55
0.06
0.033
50
30
20
20
30
50
60
70
70
0,02
0,03
0,02
0,04
0,015
0,02
0,09
0.05
0.05
0,015
0,08
0,045
0,09
0,06
0,08
0,01
0.08
0.07
a)Xây dựng sơ đồ cấu trúc của động cơ trên khi từ thông giữ bằng định mức và
đầu vào là điện áp phần ứngU(p) [V], đầu ra là tốc độ góc ω(p) [rad/s]
b)Áp dụng tiêu chuẩn mô đun tối ưu, hãy tổng hợp bộ điều chỉnh dòng điện khi
bỏ qua sự ảnh hưởng của sức điện động động cơ. Biết hệ thông có cấu trúc dạng
sau.
Uiđ
E
(-)
Ui
R(p)
Bộ biến đổi
WBBD
Ud
Ki
1 + Ti p
Eư
(-)
Phần
ứng
động cơ
Wdc
Iư
Cảm biến
dòng điện Si
Chương 2: Tổng hợp hệ thống truyền động điện một chiều
Câu 1
Trình bày động cơ điện một chiều ở chế độ xác lập và chế độ quá độ. Lập mô hình
toán học? Áp dụng lập mô hình cho động cơ có tham số như bảng Bài 7 chương 1
Câu 2
Tổng hợp mạch vòng dòng điện động cơ điện một chiều:
-Khái niệm mạch vòng điều chỉnh dòng điện.
-Tổng hợp mạch vòng dòng điện khi bỏ qua sức điện động động cơ.
-Tổng hợp mạch vòng dòng điện có tính đến sức điện động động cơ.
Kb
Áp dụng cho hệ có thong số ở bảng sau(Biết bộ biến đổi Wbd= 1 +T p , cảm dòng
b
điện là
Si =
Ki
volt/rad/s. Tham số Bài 7 chương 1
1 + Ti p
Câu3
Trình bày về tổng hợp hệ thống truyền động điều chỉnh tốc độ động cơ điện một
chiều:
- Hệ thống điều chỉnh tốc độ dùng bộ điều chỉnh tốc độ tỷ lệ I.( DÙNG TIÊU
CHUẨN MODULE TỐI ƯU)
- Hệ thống điều chỉnh tốc độ dùng bộ điều chỉnh tốc độ tích phân tỷ lệ PI.( DÙNG
TIÊU CHUẨN ĐỐI XỨNG)
Áp dụng cho đối tượng như bảng sau:
T
T
J(N
Iđm( nđm( Lư(
2
A) V/p) mH) m )
Pđm
(kW
)
Uđm(V
)
1
2
10
75
110
440
100
194
500 20
1000 500
(mô
men
quán
tính)
1
5
3
4
5
6
7
8
9
10
20,5
1,5
4,2
7
95
12
25
50
440
220
220
220
220
220
220
440
55
1000
1500
500
1180
500
685
3000
600
2,5
0,7
0,9
0,5
20
1,3
2.5
11.5
8,31
20
37,5
470
64
128
134
45
15
18
40
1000
370
700
900
Tb
Kb
Ki
V/A
Ti
(s)
Kω
Tω
V/rad/s
ms
0,01
0,01
5
0,08
0,04
0,09
0,06
0,08
0,01
0.08
0.07
0,05
0.08
5
6
0.09
0.05
0,08
0,05
0,08
0,05
0,09
0,1
4
7
9
8
7
9
7
9
0,5
0,5
10
50
0,01
0,02
0,6
0,3
0,5
0,34
0,33
0,55
0.06
0.03
3
30
20
20
30
50
60
70
70
0,03
0,02
0,04
0,015
0,02
0,09
0.05
0.05
Câu 4
Trình bày về:
- Hệ thống điều chỉnh tốc độ khi không có mạch vòng dòng điện.
Áp dụng cho động hệ có cac phần tử sau:
- Trình bày lý thuyết về hệ thống điều chỉnh tốc độ điều chỉnh hai thông số.
Áp dụng cho hệ có cá phần tử sau
Động cơ
Bộ BĐ
Cảm biến
tốc độ
T
T
1
2
3
4
5
6
7
8
9
10
Pđm
(kW
)
Uđm(V
)
10
75
20,5
1,5
4,2
7
95
12
25
50
110
440
440
220
220
220
220
220
220
440
J(N
Iđm( nđm( Lư(
2
A) V/p) mH) m )
100
194
55
8,31
20
37,5
470
64
128
134
500
1000
1000
1500
500
1180
500
685
3000
600
20
500
45
15
18
40
1000
370
700
900
(mô
men
quán
tính)
1
5
2,5
0,7
0,9
0,5
20
1,3
2.5
11.5
Tb
0,5
0,5
0,6
0,3
0,5
0,34
0,33
0,55
0.06
0.03
3
Kb
10
50
30
20
20
30
50
60
70
70
Kω
Tω
V/rad/s
ms
0,05
0.08
0.09
0.05
0,08
0,05
0,08
0,05
0,09
0,1
5
6
4
7
9
8
7
9
7
9
Câu 5
Cho động cơ điện một chiều kích từ độc lập có các thông số định mức của động
cơ, BBD, Cam biến tốc độ và mô men quán tính tải đã quy đổi như sau( Theo
bảng). Tổng hợp hệ thống truyền động điều chỉnh tốc độ động cơ điện khi
Kb
không có mạch vòng điều chỉnh dòng điện. Biết bộ biến đổi Wbd= 1 + T p , cảm
b
K
ω
biến tốc độ là S ω = 1 + T p volt/rad/s.
ω
Tham số theo bảng bài 3 Chương 2
Chương 3:
Tổng hợp hệ thống truyền động động cơ không đồng bộ
Câu 1
Trình bày phần lý thuyết mô tả động cơ không đồng bộ.
Câu 2
Trình bày phần lý thuyết Mạch vòng dòng điện. Lấy ví dụ một động cơ và mô phỏng
mô hình trên Matlab&Simulink.
Câu 3.
Trình bày phần lý thuyết điều chỉnh tốc độ thông qua việc điều chỉnh điện áp.
- Sơ đồ nguyên lý.
- Điều chỉnh điện áp động cơ lồng sóc.
- Điều chỉnh điện áp động cơ rôto dây quấn.
Câu 4:
Trình bày phần lý thuyết điều chỉnh tốc độ bằng điều chỉnh điện trở rôto.
- Sơ đồ nguyền lý.
- Sơ đồ cấu trúc hệ thống điều chỉnh.
- Xây dựng các bộ điều chỉnh dòng điện và tốc độ.
Câu 5:
Trình bày phần lý thuyết điều chỉnh tốc độ thông qua việc điều chỉnh công suất trượt
-Sơ đồ nguyền lý.
- Sơ đồ cấu trúc hệ thống điều chỉnh.
- Xây dựng các bộ điều chỉnh dòng điện và tốc độ.
Câu 6
Trình bày phần lý thuyết điều chỉnh tốc độ thông qua việc điều chỉnh tần số nguồn
cấp.
- Luật điều khiển giữ khả năng quá tải không đổi.
- Luật điều chỉnh từ thông không đổi.
- Điều chỉnh tần số điện áp.
Bài 7. Tổng hợp mạch vòng dòng điện stato động cơ điện không đồng bộ rotor
lồng sóc có các thông số sau.
•
Bộ biến đổi: Hệ số khuếch đại Kd=150, hàng số thời gian trễ thống kê Tvo=50ms,
Tđk=2ms ; tần số điện áp nguồn fn = 50Hz
• Thông số bộ lọc: Rf = 0,05Ω, Lf = 100mH.
• Thông số mạch stato động cơ: Rs = 0,05Ω, Lsσ = 150mH
• Thông số cảm biến dòng điện: hệ số khuếch đại Ki=0.01 5V/A, hằng số thời
gianTi=10ms
Bài 8
Tổng hợp mạch vòng tốc độ động cơ điện không đồng bộ rotor lồng sóc
có các thông số sau:
TT BBD
1
2
3
4
5
6
7
Bộ lọc
Tb
(s)
Kb Rf
0,5
0,5
0,6
0,3
0,5
0,34
0,33
10
50
30
20
20
30
50
0,3
0,6
1
0,5
0,1
0,2
0,4
Lf
0,4
0,2
0,8
0,6
0,5
0,5
0,8
Cảm
biến
dòng
Ki
Ti
(s)
0,01
0,02
0,03
0,02
0,04
0,01
0,015
0,08
0,04
0,09
0,015 0,06
0,02 0,08
8 0,55 60 0,6 0,5 0,09 0,01
9 0.06 70 0,4 0,8 0.05 0.08
10 0.033 70 0,1 0,7 0.05 0.07
∂M
Thông số Cảm biến Mo
stator
tốc độ
men ∂I s
quán
tính
J
Rs Ls
Kω Tω
∂M
∂ω
(ms)
0,3
0,6
0,5
1,5
0,3
0,2
0,
8
0,6
0,7
0,9
0,5
0,8
0,2
0,15
0,5
0,5
0,4
0,05
0.08
0.09
0.05
0,08
0,05
0,08
5
6
4
7
9
8
7
0,5
0,8
0,7
0,05 9
0,09 7
0,1 9
1
5
2,5
0,7
0,9
0,5
20
1
2,1
2,2
2,5
3,1
4,6
4,0
2
1
1,5
1
2
3
4,5
1,3
2.5
11.5
3,2
2
6
9
20
90
Câu 9.
Tổng hợp mạch vòng dòng điện stato động cơ điện không đồng bộ có các thông
số sau:
•
Bộ biến đổi: Hệ số khuếch đại Kb=30, hằng số thời gian trễ thống kê Tvo=20ms, tần
số điện áp nguồn fn = 50Hz.
•
Thông số bộ lọc: Rf = 0,01Ω, Lf = 80mH.
•
Thông số mạch stato động cơ: Rs = 0,2Ω, Lsσ = 550mH
•
Thông số cảm biến dòng điện: hệ số khuếch đại Ki=0,035 V/A, hằng số thời gian
Ti=20ms
Câu 10.
Tổng hợp mạch vòng tốc độ động cơ điện không đồng bộ rotor dây quấn có các
thông số sau:
•
Bộ biến đổi: Hệ số khuếch đại Kb=20, hằng số thời gian trễ thống kê Tvo=30ms, tần
số điện áp nguồn fn = 50Hz.
•
Thông số bộ lọc: Rf = 0,05Ω, Lf = 200mH.
•
Thông số mạch stato động cơ: Rs = 0,1Ω, Lsσ = 200mH
•
Thông số cảm biến dòng điện: hệ số khuếch đại Ki=0,02 V/A, hằng số thời gian
Ti=50ms
•
∂I r
∂M
= 1,2 ∂M = 0,75
= 0,02
∂
I
∂
U
2
r
∂
ω
s
Mô men quán tính J=1Kgm ; lấy
;
;
•
Thông số cảm biến tốc độ: hệ số khuếch đại Kω=0,005 V/rad/s, hằng số thời gian
Tω=50ms.