Xây dựng hệ thống điều khiển thiết bị cơ khí thủy công cho các nhà máy thủy điện trên cơ sở tích hợp công nghệ và phương pháp hiện đại
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (10.69 MB, 161 trang )
Bộ giáo dục và đào tạo Bộ quốc phòng
Học viện kỹ thuật quân sự
---------------&---------------
Phạm Văn ĐA
Xây dựng hệ thống điều khiển thiết bị
cơ khí thuỷ công cho các nh máy
thuỷ điện trên cơ sở tích hợp công nghệ
v phơng pháp hiện đại
Luận văn Thạc sĩ kỹ thuật
Hà nội- năm 2006
Bộ giáo dục và đào tạo Bộ quốc phòng
Học viện kỹ thuật quân sự
---------------&---------------
Phạm Văn ĐA
Xây dựng hệ thống điều khiển thiết bị
cơ khí thuỷ công cho các nh máy
thuỷ điện trên cơ sở tích hợp công nghệ
v phơng pháp hiện đại
Chuyên ngành: Tự động hoá
Mã số: 60 52 60
Luận văn Thạc sĩ kỹ thuật
Hớng dẫn khoa học
Nguyễn Ngọc Hoà
Hà nội- năm 2006
LUậN VĂN THạC sĩ kỹ thuật
Tên đề tài:
Xây dựng hệ thống điều khiển thiết bị cơ khí thuỷ công cho các nhà máy
thuỷ điện trên cơ sở tích hợp công nghệ và phơng pháp hiện đại
Chuyên ngành: Tự động hoá
Mã số: 60 52 60
Ngày giao đề tài luận văn: 30-03-2006
Ngày hoàn thành luận văn:28-12-2006
Ngời thực hiện:
Họ và tên: Phạm Văn Đa
Lớp: Tự động hoá Khoá: K15
Hệ không tập trung
Cán bộ hớng dẫn:
Họ và tên: Nguyễn Ngọc Ho Cấp bậc: Đại tá
Học hàm, học vị: GVC, TS Đơn vị công tác: HVKTQS
Hà nội- năm 2006
Bộ giáo dục và đào tạo Bộ quốc phòng
Học viện kỹ thuật quân sự
------------------
&-----------------
bảng các ký hiệu
PLC
Bộ điều khiển khả trình (Programmable logic controller)
STEP7 Chơng trình lập trình điều khiển cho PLC họ Siemens
WINCC Chơng trình cơ sở cho lập trình giao diện giám sát và điều khiển
VXL Hệ vi xử lý bao gồm bộ xử lý trung tâm MC, bộ nhớ, bus ...
CPU Khối xử lý trung tâm
OPC Phần mềm liên kết thiết bị điều khiển (Open Connectivity)
OS Trạm vận hành
ATS Bộ chuyển nguồn tự động (Auto Transfer Switch)
UPS Bộ cấp nguồn liên tục (Uninterruptible Power Supply)
TI Biến dòng (Current transformer)
TU Biến áp đo lờng (Voltage transformer)
HMI Hệ thống giao diện ngời máy (Human Machine Interface)
IDE Môi trờng phát triển tích hợp (Integrated Developer Environment)
PC Máy tính cá nhân (Personal Computer)
SP Giá trị điểm đặt (Set Point)
PV Giá trị quá trình (Process Value)
DB Khối dữ liệu (Data Block)
IM Mô đun cho mở rộng rack (Interface Module)
I/O Kết nối vào/ra (input/output)
DCS Hệ thống điều khiển phân tán (Distributed control system)
SCADA Hệ thống giám sát, điều khiển và thu thập dữ liệu (Supervisory
Control And Data Acquisition).
Mục lục
Trang
Mở đầu
1
- Cơ sở khoa học, tính mới và tính thực tiễn 1
- Mục đích và nhiệm vụ của luận văn 2
- Phơng pháp nghiên cứu và cấu trúc lụân văn 2
Chơng 1: Tổng quan về vấn đề nghiên cứu
3
1.1 Khái quát về hệ thống điều khiển thiết bị thuỷ công nhà máy
thuỷ điện
3
1.1.1 Hệ thống điều khiển các cửa van cung đập tràn 4
1.1.2 Hệ thống điều khiển các cửa nhận nớc 8
1.1.3 Các thiết bị đo lờng chính trong hệ thống thiết bị cơ khí thuỷ công 11
1.1.4 Hệ thống thuỷ lực, điện và điều khiển 17
1.2 Tóm tắt về sự phát triển công nghệ và phơng pháp điều khiển
hệ thống thiết bị cơ khí thuỷ công
17
1.2.1 Hệ thống điều khiển thiết bị cơ khí thuỷ công trên Thế giới 17
1.2.2 Tình hình nghiên cứu, tích hợp hệ thống điều khiển thiết bị cơ khí
thuỷ công trong nớc
21
1.2.3 Giải pháp cho sản xuất hệ thống điều khiển trong nớc 23
1.3 Đặt vấn đề nghiên cứu
23
1.4 Kết luận chơng 1
24
Chơng 2: Lựa chọn giải pháp tích hợp hệ thống
26
2.1 Cơ sở tính toán, thiết kế chung
26
2.1.1 Sơ đồ khối chức năng trạm điều khiển tại chỗ 26
2.1.2 Sơ đồ khối chức năng trạm điều khiển từ xa 29
2.1.3 Xây dựng mô hình toán học và hàm truyền hệ thống 32
2.1.4 Tính toán thiết kế nguồn động lực 36
2.1.5 Tính toán thiết kế trạm điều khiển tại chỗ 40
2.1.6 Tính toán thiết kế trạm điều khiển từ xa 47
2.2 Lựa chọn tích hợp cấu hình và thiết bị phần cứng
49
2.2.1 Các thiết bị đảm bảo nguồn động lực 49
2.2.2 Cấu hình phần cứng các trạm điều khiển tại chỗ 50
2.2.3 Cấu hình phần cứng trạm điều khiển từ xa 53
2.3 Lựa chọn phần mềm cơ sở cho lập trình điều khiển và giám sát
56
2.3.1 Lựa chọn phần mềm cho lập trình điều khiển 56
2.3.2 Lựa chọn phần mềm cho lập trình giao diện điều khiển, giám sát và
thu thập xử lý dữ liệu
60
2.4 Kết luận chơng 2.
63
Chơng 3: Xây dựng hệ thống điều khiển thiết bị cơ
khí thuỷ công cho nh máy thuỷ điện a-vơng
65
3.1 Các đối tợng và yêu cầu điều khiển
65
3.1.1 Hệ thống điện thuỷ lực và các yêu cầu điều khiển cửa van 65
3.1.2 Hệ thống đo lờng, bảo vệ và các yêu cầu điều khiển hệ thống 71
3.1.3 Thu thập, xử lý dữ liệu và truyền thông 72
3.2 Xây dựng thuật toán điều khiển hệ thống các cửa van cung đập
tràn
73
3.2.1 Thuật toán cho các trạm điều khiển tại chỗ 73
3.2.2 Thuật toán và liên động cho trạm điều khiển từ xa 75
3.3 Lập trình điều khiển cho các cửa van cung đập tràn
77
3.3.1 Chơng trình điều khiển trạm tại chỗ 77
3.3.2 Chơng trình điều khiển trạm từ xa 82
3.4 Thiết kế giao diện giám sát, điều khiển và thu thập dữ liệu
(Sử dụng phần mềm WinCC V6.0 SP2 của Siemens)
90
3.4.1 Thiết kế các giao diện giám sát và điều khiển 90
3.4.2 Thiết kế các trang trợ giúp (help) 94
3.4.3 Thiết kế các giao diện thu thập dữ liệu, in ấn báo cáo 97
3.5 Kết luận chơng 3
100
Kết luận chung
101
Danh mục công trình của tác giả
102
Tài liệu tham khảo
103
Phụ lục
1 Các hình ảnh về hệ thống thiết bị cơ khí thuỷ công TĐ AVơng
2 Bản vẽ thiết kế cơ bản trạm điều khiển tại chỗ
3 Bản vẽ thiết kế cơ bản trạm điều khiển từ xa
4 Chơng trình PLC điều khiển trạm tại chỗ
5 Chơng trình PLC điều khiển trạm từ xa
Danh mục các bảng
Trang
B 2.1
Tính tham số PID tối u sai lệch tĩnh nhỏ nhất - Java Applets 36
B 2.2
Tính thời gian và bộ nhớ PLC 45
B 2.3
Thời gian và bộ nhớ yêu cầu của PLC 45
B 2.4
Tính công suất tiêu thụ DC của hệ PLC 46
B 2.5
Bảng kê yêu cầu thiết bị giao diện điều khiển
49
B 2.6
Công suất tiêu thụ của các thiết bị động lực
50
B 2.7
Tính toán thiết bị PLC điều khiển của trạm tại chỗ
51
B 2.8
Tính công suất tiêu thụ nguồn DC trạm tại chỗ (W) 53
B 2.9
Tính chọn thiết bị PLC trạm điều khiển từ xa
54
B 2.10
Yêu cầu bộ nhớ chơng trình và thời gian đáp ứng của
PLC tại trạm điều khiển từ xa.
54
B 2.11
Tính công suất tiêu thụ nguồn DC trạm từ xa (W) 55
Danh mục các hình vẽ, đồ thị
Trang
H 1.1
Vị trí, hình dạng và kết cấu cửa van cung xả tràn 04
H 1.2 Sơ đồ hệ thống thuỷ lực chuẩn cho nâng hạ cửa van cung 06
H 1.3 Sơ đồ tổng thể hệ thống điều khiển cửa van cung 07
H 1.4 Kết cấu cơ khí cửa van phẳng cửa nhận nớc 08
H 1.5 Sơ đồ thuỷ lực cửa van phẳng cửa nhận nớc 10
H 1.6 Một số kiểu dáng của thiết bị giám sát trạng thái 12
H 1.7 Cặp tiếp điểm của thiết bị giám sát trạng thái 12
H 1.8 Thiết bị đo góc và phát xung Encoder 13
H 1.9 Sơ đồ xung ra của một bộ encoder 14
H 1.10 Hình dáng đầu đo mức dùng phơng pháp đo chênh áp 15
H 1.11 Các kiểu dáng đầu dò rađa, siêu âm, bộ điều khiển cho hệ thống
đo mức nớc
16
H 2.1 Sơ đồ tổng thể hệ thống điện, thuỷ lực hệ thống nâng hạ cửa van
trạm điều khiển tại chỗ - hệ thống cơ khí thuỷ công
27
H 2.2 Sơ đồ khối trạm điều khiển tại chỗ cho hệ thống điều khiển thuỷ
lực nâng hạ cửa van hệ thống cơ khí thuỷ công
30
H 2.3 Sơ đồ khối trạm điều khiển từ xa cho hệ thống điều khiển thuỷ lực
nâng hạ cửa van hệ thống cơ khí thuỷ công
31
H 2.4 Góc dịch chuyển và lực tác dụng của hệ van cung 33
H 2.5
Sơ đồ cấu trúc hệ điều khiển cửa van cung
34
H 2.6
Sơ đồ cấu trúc điều khiển tiêu chuẩn
35
H 2.7
Đặc tính thời gian- dòng điện của rơ le nhiệt và động cơ điện
39
H 2.8
Bố trí đèn cảnh báo và các công tắc vận hành trạm ĐK tại chỗ
42
H 2.9
Lực nâng, hạ của xi lanh thuỷ lực và hớng tác dụng của dầu
thuỷ lực
43
H 2.10
Giao diện chọn phơng thức kết nối với PLC họ S7-200
57
H 2.11
Chọn ngôn ngữ hiển thị lập trình cho S7-200 dùng Microwin
58
H 2.12
Các phơng thức và đối tợng kết nối của STEP
7-
V5.3-SP2
58
H 2.13
Thiết lập cấu hình phần cứng và lập trình STEP7-V5.3-SP2
59
H 2.14
Lựa chọn kiểu kết nối với PLC trong WinCC-V6.0-SP2
60
H 2.15
Thiết lập giao diện giám sát và điều khiển trong WinCC-V6.0
61
H 2.16
Xây dựng giao diện giám sát và điều khiển dùng WinCC
62
H 2.17
Thiết kế thu thập lu trữ dữ liệu trong WinCC-V6.0
62
H 2.18
Thiết kế trang in ấn trong WinCC-V6.0
63
H 3.1
Sơ đồ thuật toán hoạt động của trạm điều khiển tại chỗ
74
H 3.2
Sơ đồ thuật toán hoạt động của trạm điều khiển từ xa
76
H 3.3
Gọi Subroutine đếm xung và truyền dữ liệu vào bộ đếm
77
H 3.4
Gọi hàm HSC0 đếm xung từ Encoder
78
H 3.5
Nhấn F1, tìm các tham số của bộ đếm HSC
79
H 3.6
Đặc tính xả tràn 4 cấp độ
80
H 3.7
Cấu hình kết nối và điều khiển hệ thống
83
H 3.8
Cấu hình chi tiết phần cứng của thiết bị PLC trạm điều khiển
từ xa
84
H 3.9
Thiết lập cấu hình phần cứng trạm điều khiển từ xa
85
H 3.10
Các khối chức năng sử dụng trong chơng trình
88
H 3.11
Đặc tính xả tràn cho lập trình điều khiển trạm từ xa
89
H 3.12
Thao tác lập trình hàm FC9-Tính đặc tính xả tràn
89
H 3.13
Tạo Project mới và tạo kết nối PLC từ WinCC
91
H 3.14
Màn hình chính giao diện giám sát và điều khiển tại đập tràn
Công trình thuỷ điện A-Vơng
91
H 3.15
Thanh công cụ thoát khỏi chơng trình điều khiển
92
H 3.16
Giao diện đăng nhập hệ thống
93
H 3.17
Giao diện vào thông số tính đặc tuyến xả tràn
93
H 3.18
Giao diện điều khiển cho cửa số 1
94
H 3.19
Xây dựng các trang HTML sử dụng Microsoft FrontPage
95
H 3.20
Liên kết các file *.htm thành file *.chm dùng HTML Help
Workshop
96
H 3.21
Kết quả chạy file help.exe liên kết đến các trang help
96
H 3.22
Thiết kế bảng thu thập và xử lý dữ liệu
97
H 3.23
Thiết kế trang báo cáo cho các cửa riêng biệt
98
H 3.24
Thiết kế trang giao diện báo cáo chung cho hệ thống
99
1
Mở đầu
1. Cơ sở khoa học, tính mới và tính thực tiễn
- Hiện nay việc nghiên cứu chế tạo và phát triển các thiết bị điều khiển, tự động
hoá đã phát triển rất cao cả trong nớc cũng nh trên Thế giới. Các thiết bị điều
khiển nh PLC, các máy CNC, các thiết bị sử dụng DSP, các máy tính điều khiển
PCI, PXI... đã trở thành những sản phẩm thơng mại phổ biến tại khắp các thị
trờng trong và ngoài nớc. Những cơ sở lý thuyết tính toán, thiết kế cũng nh các
công cụ phần mềm để mô phỏng, tính toán, điều khiển cũng hết sức phong phú và
đa dạng nh Matlab, Labview, WinCC,... Với các điều kiện khoa học và công nghệ
cơ sở hiện nay, hoàn toàn cho phép chúng ta thực hiện tốt việc thiết lập, xây dựng
những hệ thống điều khiển hiện đại, có quy mô lớn và đáp ứng những yêu cầu công
nghệ phức tạp.
- Việc nghiên cứu áp dụng và chế tạo thành công các hệ thống điện, điều khiển
cho điều khiển các hoạt động của nhà máy thuỷ điện đã đợc thực hiện nhiều bởi
các hãng sản xuất thiết bị điều khiển và tích hợp hệ thống trên Thế giới. Tuy nhiên
do nền tảng công nghệ chế tạo thiết bị điều khiển trong nớc còn hạn chế, nên các
nhà sản xuất cũng nh các cơ sở nghiên cứu trong nớc đến nay vẫn cha có khả
năng đảm bảo cung cấp các hệ thống thiết bị điều khiển đồng bộ cho các nhà máy
thuỷ điện có công suất từ 10 MW trở lên. Do đó đề tài nghiên cứu này có tính tiên
phong phục vụ các kế họach nội địa hoá các hệ thống thiết bị đồng bộ phục vụ cho
ngành điện nói riêng và ngành công nghiệp trong nớc nói chung.
- Việc xây dựng hệ điều khiển các nhà máy thuỷ điện nói chung và các thiết bị
cơ khí thuỷ công nói riêng có một ý nghĩa thực tiễn hết sức cấp bách. Theo chiến
lợc phát triển ngành Điện Việt nam đã đợc Thủ tớng Chính phủ phê duyệt tại
quyết định 176/2004/QĐ-TTG ngày 5/10/04, thì "trong 20 năm tới sẽ xây dựng
hầu hết các nhà máy thuỷ điện tại những nơi có khả năng xây dựng. Dự kiến đến
năm 2020 tổng công suất các nhà máy thuỷ điện đạt 13.000-15.000 MW". Nh
vậy chúng ta sẽ phải xây dựng khoảng 46 nhà máy thuỷ điện có công suất lớn hơn
50 MW và khoảng 100 nhà máy thuỷ điện có công suất đến 50 MW.
2
- Cơ sở khoa học và thực tiễn của đề tài còn đợc khẳng định trong quyết định
phê duyệt danh mục các nhiệm vụ khoa học và công nghệ thuộc Dự án khoa học và
công nghệ số 2512/QĐ-BKHCN ngày 22/9/05 của Bộ trởng Bộ Khoa học và
Công nghệ. Đề tài số 4 có tên là "Nghiên cứu, thiết kế, tích hợp, lắp đặt và vận
hành hệ thống điều khiển tổ máy turbin thuỷ lực và nhà máy thuỷ điện Đaskrông"
do Viện nghiên cứu Cơ khí - Bộ Công nghiệp chủ trì. Trong đó hệ điều khiển các
thiết bị cơ khí thuỷ công là một phần trong nội dung thực hiện của đề tài.
2. Mục đích và nhiệm vụ của luận văn
- Làm chủ đợc các cơ sở lý thuyết cũng nh thực tiễn cho phép thiết kế, tích
hợp và lập trình hệ thống điều khiển các thiết bị cơ khí thuỷ công cho các nhà máy
thuỷ điện.
- Xây dựng, thiết lập đợc các thuật toán điều khiển và hệ thống điều khiển các
thiết bị cơ khí thuỷ công trên cơ sở những phần cứng và phần mềm cơ sở có sẵn tại
thị trờng Việt nam.
- Vận dụng cho xây dựng hệ thống điều khiển thiết bị cơ khí thuỷ công nhà máy
thuỷ điện A-Vơng - Đà Nẵng Việt Nam.
- Nâng cao năng lực thiết kế tích hợp hệ thống điều khiển cho các nhà máy thủy
điện nói riêng và các hệ thống tự động hoá các dây chuyền sản xuất công nghiệp
nói chung.
3. Phơng pháp nghiên cứu và cấu trúc luận văn
Để đạt đợc những mục tiêu đề ra, việc nghiên cứu khái quát kinh nghiệm từ
những công trình thuỷ điện trong và ngoài nớc để xây dựng cơ sở lý thuyết và tích
hợp, chế tạo với điều kiện cơ sở, thiết bị trong nớc hiện nay là phơng pháp có hiệu
quả và tin cậy nhất. Vì vậy nội dung luận văn đợc chia thành ba chơng chính,
chơng 1 nêu những nghiên cứu khái quát về hệ thống cơ khí thuỷ công trong và
ngoài nớc, chơng 2 sẽ đ
a ra những cơ sở lý thuyết tính toán, lựa chọn thiết bị cho
thiết kế, tích hợp hệ thống, chơng 3 là nội dung áp dụng cho xây dựng hệ thống
điều khiển thiết bị cơ khí thuỷ công trong thực tế.
3
Chơng 1
Tổng quan về vấn đề nghiên cứu
1.1
Khái quát về hệ thống điều khiển thiết bị thuỷ công nhà máy
thuỷ điện
Những năm gần đây (từ năm 2002 đến nay) đợc sự quan tâm phát triển ngành
cơ khí, điện, chế tạo trong nớc của Đảng và Nhà nớc ta, các đơn vị chế tạo trong
nớc đã đảm bảo đợc các công việc từ thiết kế đến cung cấp trọn gói các hệ thống
thiết bị cơ khí thuỷ công ở mọi quy mô. Điều này đã đợc khẳng định theo kết quả
kiểm tra công tác thiết kế, chế tạo thiết bị cơ khí thuỷ công của liên danh nhà thầu
MIE-NARIME-VINAINCON của Bộ Công nghiệp tại trang:
sodauthang/tintucthoisu/2006/1/15713.ttvn.
Hệ thống các thiết bị cơ khí thuỷ công đợc đánh giá là hệ thống rất quan trọng
và chiếm tỷ trọng giá trị cao trong các công trình thuỷ điện. Những thành công bớc
đầu trong việc cung cấp toàn bộ hệ thống từ thiết kế đến chế tạo các thiết bị cơ khí
thuỷ công cho các nhà máy thuỷ điện Plêi-Krông, Buôn-Kuốp, ... của các đơn vị
trong nớc đã đặt niềm tin vững chắc cho Chính phủ về khả năng cung cấp hoàn
chỉnh các hệ thống thiết bị cơ khí thuỷ công cho các nhà máy thuỷ điện lớn trong
nớc. Điều này thể hiện trong cuộc họp đầu tháng 2/2006 do Bộ Công nghiệp chủ
trì, đợc đăng tải trên trang:
/15573.ttvn về việc chuẩn bị cho chế tạo thiết bị nhà máy thuỷ điện Sơn La.
Hệ thống điều khiển các thiết bị cơ khí thuỷ công là một phần rất quan trọng và
không thể thiếu đợc trong việc cung cấp các hệ thống đồng bộ. Sự hoạt động an
toàn, tin cậy và hiệu quả của toàn bộ hệ thống thiết bị cơ khí thuỷ công phụ thuộc
phần lớn vào sự an toàn, tin cậy của hệ thống điều khiển.
Tại hầu hết các công trình thuỷ điện hệ thống thiết bị cơ khí thuỷ công luôn bao
gồm hệ thống các cửa nhận nớc và hệ thống các cửa van cung xả tràn. Ngoài ra tuỳ
vào đặc điểm và quy mô cụ thể của mỗi công trình có thể có thêm các hệ thống cửa
xả sâu, hệ thống cửa van đập điều hoà, hệ thống van côn xả đáy ... Hệ thống điều
khiển luôn bao gồm việc đảm bảo điều khiển hoàn toàn, tin cậy mọi hoạt động của
các thiết bị trong phạm vi và hệ thống các thiết bị đo lờng, cảnh báo và bảo vệ.
4
Trong khuôn khổ của luận văn, chúng ta sẽ đi vào nghiên cứu các hệ thống cơ bản
trong hệ thống thiết bị cơ khí thuỷ công là cửa nhận nớc, cửa đập tràn và hệ thống
các thiết bị đo lờng.
1.1.1
Hệ thống điều khiển các cửa van cung đập tràn
Hệ thống các cửa van cung đập tràn có chức năng tích nớc, xả nớc và điều tiết
mức nớc trong hồ chứa cho công trình thuỷ điện. Số lợng các cửa xả, lu lợng xả
cũng nh các thông số về kích thớc mỗi cửa xả phụ thuộc vào quy mô và các điều
kiện cụ thể của mỗi công trình. Mỗi công trình thuỷ điện có thể có từ 2 đến 12 cửa
xả tràn. Có thể thiết kế các cửa xả tràn theo kiểu phẳng hay kiểu vòng cung, song vì
các đặc tính chịu lực và đảm bảo độ bền theo yêu cầu mà hầu hết các công trình
thuỷ điện trong nớc hiện nay đều sử dụng các cửa van xả tràn có dạng vòng cung
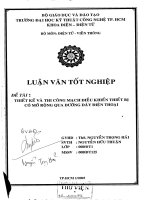
và đợc gọi là các cửa van cung. H 1.1 thể hiện hình dạng, vị trí và kết cấu cơ khí
của một cửa van cung.
Để điều khiển việc nâng, hạ cửa van cung ta có thể dùng hai dạng kết cấu điều
khiển cơ bản là dùng tời điện để kéo và hạ cửa van hoặc dùng hệ thống xi lanh thuỷ
lực để nâng, hạ cửa van.
Hệ thống nâng hạ cửa van cung sử dụng tời điện thì kết cấu cơ khí phải đảm bảo
việc đồng tốc giữa hai nửa của cửa van. Để thực hiện việc này tại một số công trình
Hình 1.1: Vị trí, hình dạng và kết cấu cửa van cung xả tràn
5
thuỷ điện sử dụng một động cơ truyền động, có trục gắn cứng để kéo đồng thời cả
hai nửa của van. Hệ thống giám sát và điều khiển độ mở cửa van trong trờng hợp
này không có gì đặc biệt. Tuỳ theo yêu cầu cụ thể mà có thể có bộ đo và hiển thị
góc mở liên tục hoặc có thể chỉ dùng các công tắc chỉ báo trạng thái vị trí cửa từ 4
đến 6 cấp. Thực tế cho thấy việc điều khiển nâng hạ cửa van cung bằng tời điện thì
cấu trúc hệ thống điều khiển tơng đối đơn giản. Tuy nhiên nó có một số nhợc
điểm nh sau:
- Phải bảo trì hệ thống cáp thờng xuyên.
- Hệ thống tời điện khi khởi động nâng cửa van sẽ phải khởi động động cơ trong
trạng thái đầy tải gây ảnh hởng đến nguồn điện chung.
- Việc điều khiển độ mở cửa van cung tới vị trí điểm đặt có độ sai lệch lớn.
Ngày nay việc chế tạo và ứng dụng các hệ thống thuỷ lực vào các công đoạn đòi
hỏi độ ổn định chính xác làm việc cao với tải trọng lớn nh là một điều tất yếu. Hệ
thống điều khiển nâng hạ các cửa van cung xả tràn cho các nhà máy thuỷ điện cũng
vậy. Tải trọng làm việc rất lớn (tải trọng nâng cửa van cung khoảng 250 tấn) và độ
chính xác yêu cầu điều khiển cỡ mm so với toàn dải nâng khoảng từ 7 đến 10 mét.
Do vậy hệ thống điều khiển nâng hạ các cửa van cung đập tràn phổ biến sử dụng
hiện nay là hệ thống nâng hạ bằng xi lanh thuỷ lực. Hệ thống nâng hạ các cửa van
cung bằng thuỷ lực thờng sử dụng là hệ thống có 02 xi lanh thuỷ lực nâng hạ đồng
thời hai bên sờn của cửa van cung. Do kết cấu đặc thù của van cung mà phần cơ
khí chế tạo đảm bảo độ cứng, tránh xô lệch giữa hai bên cửa nên không cần có bộ
phận đồng bộ hai xi lanh khi khoảng vợt cửa van cung nhỏ hơn 10 mét. Trong
trờng hợp bề rộng cánh cửa van cung lớn từ 15 mét trở lên thì hệ thống thuỷ lực
cần phải bổ sung bộ điều chỉnh đồng bộ việc nâng hạ hai nửa van để tránh các hiện
tợng xô lệch trong quá trình nâng hạ cửa. H 1.2 là sơ đồ hệ thống thuỷ lực nâng hạ
cửa van cung, có sử dụng 02 bộ đồng bộ thuỷ lực giữa hai xi lanh.
Ngoài ra do các yêu cầu về an toàn tuyệt đối trong việc đảm bảo vận hành các
cửa van cung, nhất là khi có yêu cầu xả lũ, mà hệ thống điều khiển nâng hạ cửa van
cung bằng thuỷ lực luôn đợc trang bị thêm một bơm thuỷ lực vận hành bằng tay và
một bộ lọc dầu di động. Mỗi cửa van cung thờng đ
ợc trang bị 02 chốt treo van
6
cung trong chế độ mở hoàn toàn trong thời gian dài. Vì vậy hệ thống điều khiển cửa
van cung phải bao hàm cả việc điều khiển và giám sát các chốt cơ khí.
Hệ thống điều khiển các cửa van cung xả tràn cho các nhà máy thuỷ điện luôn
đòi hỏi phải có hệ thống điều khiển nhóm và có cổng truyền thông cho phép ngời
vận hành có thể kiểm tra, điều khiển đợc hệ thống từ trung tâm điều khiển nhà
máy. Do vậy khi xây dựng hệ thống điều khiển các cửa van cung chúng ta phải quan
tâm không những chi tiết hệ điều khiển thuỷ lực từng cửa, mà còn cả số cửa van
Hình 1.2: Sơ đồ hệ thống thuỷ lực chuẩn cho nâng hạ cửa van cung
q= 40Cc
P= 2,5 MPa
12.11
12.10
P=1 MPa
P
12.4
Dy1 1/2"
13.7
6.6
13.3 13.4
12.6
6.7
12.12
7.9
6.8
MD-2.2
P=19 MPa
P=19,5 MPa
U
13.6
Rp1.2
14.4
7.5
15.3
14.3
P
16.2
5.5
15.4
YB1
St.x
Ix
St
Cột chỉ thị độ mở
17.2
MởĐóng
18
S1
7.8
U
S
S2
7.7
S
U
XL450x250x7.350St
4.2
1.8
Modul- Đồng bộ Modul- Đồng bộ
Modul- Điều khiển
Dy1/2"
Dy1"
Dy1/2"
Dy1 1/2"
1.3
YB1
T
10.2
P=1 MPa
P=0,6 MPa
10.3
P=0,3 MPa
4.4
MAGN
Sol.k
T3
4.6
P
4.5
U
Rf1
P=0,5 MPa
Rf2
U
5.6
P
1.7
P
5.2
5.3
MD-1-1
8.5
Dy1 1/2"
M3
N= 3,5 Kw
1.5
1.4
n= 1450 V/Ph
Trạm lọc
FU
3.3
1.6
2.3
12.7
6.3
Dy1"
13.5
12.2
P
12.3 P=0,3 MPa
Dy1/2"
13.2
12.5
13.1
6.4 6.5
12.8
16.1
12.9
14.2
P=19,5 MPa
P=19 MPa
P
7.3
15.1
14.1
13.5
U
Rp1.1
MD-2.1
5.4
15.2
XL450x250x7.350St
Rp1
U
P
7.1
P
Rp2
DSHG-06
b
BA
T2
B
T
A
P
11.1
Sol.a
T2
8.3
Sol.b
8.4
MởĐóng
17.1
YB1
13.6
P=1MPa
P=2,18 MPa
V=3000 Dm3
1.2 1.1
YB1
B
A
10.2
P=19,5 MPa
Pmax=20 MPa
2.4
P=25 MPa
P= 25 MPa
q= 25 Cc/p
10.1
P
P
P
10.2
a
T1
11.1
P
N= 30 Kw
n= 1450 V/Ph
P= 250Bar
q= 76 Cc
6.1
4.15.1
Rt
U
T
L
Rl
2.1
U
12.1
8.1
N= 30 Kw
n= 1450 V/Ph
6.2
M1
3.1 2.2
M2
3.2 4.3
q= 76 Cc
P= 250Bar
8.2
T
9.1
T1
T
7.2
13.8
U
P=3 MPa
Dy1 1/4"
Dy1"
Dy1/2"
7
trong mỗi dự án, số các tín hiệu và phơng thức đòi hỏi vận hành từ hệ thống điều
khiển nhóm. Thực chất của việc xây dựng hệ thống điều khiển nhóm (điều khiển từ
xa) là việc tích hợp một hệ thống điều khiển, giám sát và thu thập dữ liệu (SCADA).
Việc xây dựng hệ thống điều khiển các cửa van cung đập tràn ngoài việc phải
đáp ứng việc điều khiển theo điểm đặt của ngời vận hành, còn phải giám sát, tính
toán giá trị mức nớc trong hồ chứa và điều khiển tự động nâng hạ các cửa van một
cách tự động theo một chu trình, thuật toán đặt sẵn.
Trong chu trình vận hành tự động bình thờng của hệ thống các van cung đập
tràn thờng căn cứ vào hai số liệu vào cơ bản, một là số khoảng chia toàn dải vận
hành của van từ 4 đến 6 cấp tuỳ theo chiều cao làm việc của cửa van. Hai là lu
lợng xả ứng với các giá trị mức nớc thực tế trong hồ chứa, bảng giá trị này cũng
do ngời vận hành nạp vào chơng trình xả tự động của cửa van. Thuật toán xử lý,
Tủ điều khiển
Hệ thống
thuỷ lực
Xi lanh
Van cung
Tín hiệu
điều khiển
Tín hiệu
trạng thái
Dầu
thuỷ lực
Xung báo vị trí và các
công tắc hành trình
Trạm điều khiển từ xa
Tín hiệu
đo lừơng
Tín hiệu
giao tiếp,
điều khiển
Thiết bị đo mức nứơc
Hình 1.3: Sơ đồ tổng thể hệ thống điều khiển cửa van cung
8
tính toán ra chiều cao xả tại một thời điểm nào đó cho mỗi cửa sẽ phụ thuộc vào tốc
độ tăng hoặc giảm của giá trị mức nớc trong hồ và điều chỉnh độ mở cửa theo các
tham số điều khiển tự động của bộ PID. H 1.3 chỉ ra một sơ đồ khái quát các thiết bị
và sự liên hệ của hệ thống điều khiển cửa van cung xả tràn.
1.1.2
Hệ thống điều khiển các cửa nhận nớc
Các cửa nhận nớc trong các công trình thuỷ điện thờng có chiều sâu làm việc
thấp hơn so với cửa xả tràn, áp lực nớc tác động lên cửa khi nhà máy hoạt động là
không có (khi tổ máy phát điện hoạt động thì cửa nhận nớc phải mở để nhận nớc
vào đờng ống áp lực). Do đó kết cấu cơ khí của van vận hành cửa nhận nớc
thờng là dạng cửa phẳng. H 1.4 thể hiện kết cấu cơ khí một cửa van phẳng vận
hành cửa nhận nớc.
Hình 1.4: Kết cấu cơ khí cửa van phẳng cửa nhận nớc
9
Trong đó phần kết cấu để nâng hạ cửa van cũng nh trong trờng hợp điều
khiển cửa van cung, có thể áp dụng đợc cả hai phơng pháp nâng hạ bằng tời điện
hoặc bằng hệ thống xi lanh thuỷ lực.
Cửa van vận hành cửa nhận nớc có hai tác dụng chính là mở nớc vào đờng
ống áp lực, đến tuabin và đóng vai trò là van sự cố, sẽ đóng khẩn cấp ngăn nớc vào
khoang máy khi có sự cố. Về số lợng và kích thớc của cửa tuỳ thuộc vào quy mô
của mỗi công trình thuỷ điện, tuy nhiên hệ thống thiết bị cơ khí thuỷ công chiếm
một tỷ trọng lớn trong các nhà máy thuỷ điện. Trọng lợng của các cửa nhận nớc
cần phải nâng hạ cũng rất lớn. Nếu nh hệ thống quá lớn, đòi hỏi kích thớc cửa rất
lớn, thì ngời ta thờng chia ra thành nhiều cửa nhỏ sao cho lu lợng tính toán vẫn
đảm bảo mà không phải nâng hạ những cửa van quá lớn. Do vậy trọng lợng của các
cửa van vận hành này chỉ dao động từ 200 tấn đến 300 tấn và chiều cao vận hành
cũng thờng từ 7 đến 10 mét.
Hệ thống điều khiển các cửa nhận nớc cũng luôn cần giám sát trạng thái đóng
hoặc mở cửa và cũng đòi hỏi phải điều khiển và giám sát đợc từ hệ thống điều
khiển nhóm (điều khiển từ xa) và liên động điều khiển, giám sát đợc chúng từ
trong phòng điều khiển trung tâm nhà máy theo yêu cầu phát điện sản xuất. Cũng
nh hệ thống điều khiển van cung đập tràn, hệ thống điều khiển nâng hạ các cửa
nhận nớc cũng đòi hỏi việc điều khiển và giám sát trạng thái của 02 chốt treo cơ
khí cho mỗi cửa van.
Trong trờng hợp hệ thống nâng hạ cửa van phẳng sử dụng tời điện hay cầu trục
chân dê thì việc quan trọng trong hệ thống điều khiển là đảm bảo công suất nâng hạ
và giám sát bảo vệ khi cửa đã nâng hoặc đóng đến vị trí giới hạn. Điều hệ trọng nhất
đối với hệ thống điều khiển này là phải đảm bảo khả năng đóng đ
ợc cửa van trong
mọi trờng hợp để đảm bảo an toàn cho ngời và tổ máy khi có sự cố bên trong nhà
máy.
Khi sử dụng hệ thống nâng hạ cửa van phẳng cửa nhận nớc bằng xi lanh thuỷ
lực, thì thờng tại cửa nhận nớc ngời ta chỉ sử dụng một xi lanh thuỷ lực kết nối
với móc nâng tại điểm giữa cửa van. Trong trờng này, hệ thống điều khiển cửa
10
nhận nớc cũng giống nh hệ thống điều khiển van cung đập tràn bằng thuỷ lực và
sơ đồ khái quát hệ thống điều khiển cửa nhận nớc cũng nh H 1.3.
Hình 1.5: Sơ đồ thuỷ lực cửa van phẳng cửa nhận nớc
S
LS4 LS5
U
S
SS
U? NG ?NG I TRONG RNH Bấ Tễ NG
TR? M NGU? N TH? Y L? C
C? M XI LANH C? A 1
XILANH C? A 1
U
LL
U
LH
L
L
U
TH2
U
TH1
T
T
PL
P
U
PH
P
U
Cột chỉ thị độ mở
U
S
S
U
LS1
Đóng Mở
LS2
U
S
LS3
Chốt treo
U
11
Tuy nhiên hệ thống thuỷ lực không cần sử dụng thiết bị đồng bộ thuỷ lực nh
đối với nâng hạ cửa van cung, nhng bổ sung van hạ cửa tự trọng. H 1.5 thể hiện sơ
đồ thuỷ lực của hệ thống nâng hạ cửa van phẳng cửa nhận nớc.
Chu trình vận hành nâng hạ cửa van phằng cửa nhận nớc sẽ đơn giản hơn so
với van cung. Các van vận hành này thờng chỉ làm việc trong hai trờng hợp là mở
hoàn toàn hoặc đóng hoàn toàn. Nhng một điều chú ý quan trọng đối với hệ thống
điều khiển cửa nhận nớc là khi nâng (mở) cửa van phải thực hiện mở làm 2 bớc.
Bớc thứ nhất là mở cửa đến một vị trí đặt trớc trong một khoảng thời gian để cho
nớc từ phía thợng lu vào trong khoang buồng tuabin đến khi đạt đợc sự cân
bằng áp lực giữa trong và ngoài đờng ống áp lực. Bớc thứ hai là nâng cửa nhận
nớc đến vị trí giới hạn trên trong trạng thái không có sự chênh áp trớc và sau cửa.
Khi có yêu cầu đóng cửa vì một lý do nào đó, thì trong mọi trờng hợp ngời vận
hành đều có thể tháo chốt, hạ cửa van nhờ tự trọng (nhng phải điều khiển giữ hạ từ
từ tránh xốc, va chạm quá mạnh làm hỏng kết cấu cửa van và hỏng kết cấu chịu lực).
1.1.3
Các thiết bị đo lờng chính trong hệ thống thiết bị cơ khí thuỷ
công
Nh khái quát trong các phần trên, hệ thống các thiết bị đo lờng chính phục vụ
cho việc giám sát và điều khiển các thiết bị cơ khí thuỷ công đóng một vai trò hết
sức quan trọng. Việc đảm bảo sự hoạt động chính xác, ổn định của cả hệ thống điều
khiển phụ thuộc rất nhiều vào sự ổn định và chính xác của các thiết bị đo lờng.
Chúng ta có thể khái quát các thiết bị đo lờng trong hệ thống thiết bị cơ khí
thuỷ công thành 03 nhóm thiết bị đo lờng chính theo tính năng của chúng nh sau:
- Nhóm 1: Các thiết bị giám sát trạng thái vị trí dạng ON/OFF nh các công tắc
hành trình, các công tắc áp suất, các công tắc giới hạn nhiệt độ, các công tắc báo
mức. Trong hệ thống các thiết bị cơ khí thuỷ công sử dụng rất nhiều các thiết bị
giám sát dạng này. Kiểu dáng của chúng hết sức đa dạng tuỳ vào kết cấu cơ khí và
vị trí gá lắp chúng. H 1.6 chỉ ra một số kiểu dáng của các thiết bị giám sát dạng này.
Tuy nhiên xét về phần điện điều khiển, thì chúng hoàn toàn giống nhau là đa các
12
tín hiệu dạng digital (ON/OFF) về cho hệ thống điều khiển và giám sát bảo vệ hệ
thống.
Thông thờng các thiết bị giám sát này có hai cặp tiếp điểm một thờng đóng
(NC) và một thờng mở (NO) nh thể hiện trên H 1.7 sau:
- Nhóm 2: Là nhóm các thiết bị đo lờng độ mở của các cửa van cung cũng nh
độ mở của các cửa van phẳng.
Để đo lờng và hiển thị độ mở của các cửa van cung cũng nh cửa van phẳng
ngời ta có nhiều phơng pháp đo tuỳ vào yêu cầu cụ thể của dự án, sự phát triển
của khoa học kỹ thuật... Nhng về nguyên lý ngời ta thờng dùng hai cách đo cùng
hai loại thiết bị chủ yếu. Một là dùng thiết bị sensor đo góc mở, tín hiệu đo góc đợc
trả về hệ thống là dạng 4-20mA. Thiết bị này có u điểm là nó cho phép hiển thị
trực tiếp góc mở của cửa, tín hiệu đo lờng trả về hệ thống là dạng chuẩn 4-20 mA.
Tuy nhiên nó có nhợc điểm là cấp độ chính xác của nó không cao vì bán kính cong
Hình 1.6:
Một số kiểu dáng của thiết bị giám sát trạng thái
Hình 1.7: Cặp tiếp điểm của thiết bị giám sát trạng thái
13
của cửa van rất lớn nên một góc rất nhỏ tơng ứng với lợng mở lớn. Điểm nữa là
giá thành của thiết bị này rất cao và phải phụ thuộc rất lớn vào các phần cơ khí gá
lắp. Nó cũng khó khăn hơn trong việc xử lý và thu thập trực tiếp qua đờng bus hay
không đảm bảo an toàn dữ liệu bằng việc truyền tín hiệu số (0,1). Một điểm quan
trọng nữa là sẽ rất khó khăn trong việc hiển thị độ mở của cửa van phẳng gây sự
không đồng bộ khi chúng ta tích hợp một bộ điều khiển chuẩn cho phép khả năng
điều khiển và giám sát cả cửa van phẳng và cửa van cung. H 1.8 là hình ảnh về thiết
bị đo góc mở và cung và thiết bị phát xung quay (encorder).
Hai là phơng pháp đo độ mở cửa van cung, van phẳng dùng thiết bị phát xung
(encoder). Thiết bị này rất thích hợp cho việc dùng để giám sát độ mở của các cửa
van cung cũng nh các cửa van phẳng. Dùng encoder chúng ta có thể đo trực tiếp độ
mở của các cửa van một cách chính xác vì các encoder hiện nay có độ phân giải rất
cao trong khi độ dịch chuyển trên toàn dải của van là rất lớn (7-10 mét), điều này
cho phép chúng ta có thể giám sát và hiển thị độ mở của các cửa van này cỡ mm.
Một u điểm của encoder là việc trả về các tín hiệu dạng xung cho bộ điều khiển,
nên tránh đợc nhiều sai số. Ngày nay nhờ công nghệ chế tạo thiết bị phát triển mà
các hãng sản xuất đã cho ra thị trờng những encoder cho phép kết nối trực tiếp
bằng các bus truyền thông công nghiệp nh profibus, modbus ... đến bộ điều khiển
và nh vậy có thể loại bỏ hoàn toàn các nhiễu công nghiệp. Một u điểm quan trọng
Hình 1.8:
Thiết bị đo góc và phát xung Encoder
14
nữa là việc dùng encoder cho phép chúng ta chế tạo các hệ thống điều khiển cửa van
cung cũng nh cửa van phẳng cho các công trình thuỷ điện thành dạng môđun
chuẩn. H 1.9 chỉ ra sơ đồ dạng xung ra của một bộ encoder.
Tuy nhiên nhợc điểm của việc sử dụng encoder cho giám sát độ mở của các
cửa van là chúng ta phải hiệu chỉnh, tính toán số xung tổng trong toàn dải và số
xung thực tế để hiển thị đợc giá trị độ mở hiện thời theo góc mở hoặc theo chiều
cao mở. Việc tính toán này sẽ thực hiện một cách dễ dàng khi chúng ta sử dụng các
bộ điều khiển khả trình PLC.
- Nhóm 3: Là nhóm các thiết bị đo mức nớc trong hồ chứa.
Có nhiều phơng pháp đo mức nớc trong hồ chứa nớc nh phơng pháp đo
chênh áp, phơng pháp đo siêu âm hay phơng pháp đo dùng rada .... Nh vậy tuỳ
theo yêu cầu cụ thể của từng dự án mà ta dùng các phơng pháp đo khác nhau. Tuy
nhiên dù đo bằng phơng pháp nào, thì tín hiệu mức nớc đo đợc trả về hệ thống
điều khiển đều là dạng liên tục (4-20 mA), có thể một vài thiết bị hiện đại có bộ
chuyển đổi số và tích hợp mô đun truyền thông, cho phép trả giá trị đo đợc về hệ
thống qua bus truyền thông.
Đối với thiết bị đo mức sử dụng sensor đo chênh áp thì trên thị trờng hiện nay
có nhiều hãng sản xuất cung cấp đợc các thiết bị có độ chính xác cao. Thiết bị này
cho phép đấu nối tín hiệu dòng kiểu 2 dây, vì vậy có thể nối với nhiều kiểu bộ hiển
thị và điều khiển trả tín hiệu về bộ điều khiển lập trình. H 1.10 là hình ảnh về thiết
bị đầu đo kiểu chênh áp và đồng hồ đo và hiển thị. Bộ hiển thị này cho phép trả giá
Hình 1.9: Sơ đồ xung ra của một bộ encoder
Xung A
Xung B
Xung Z