Xây dựng hệ thống điều khiển giám sát cân băng định lượng trong công nghệ sản xuất xi măng
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.21 MB, 59 trang )
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Mục Lục
Trang
Lời mở đầu..................................................................................................................
2
Chương I ....................................................................................................................
4
1.Giới thiệu về công nghệ sản xuất xi măng..............................................................
4
2.Cân băng định lượng trong công nghệ sản xuất xi măng.........................................
6
Chương II...................................................................................................................
16
1. Giới thiệu về bộ điều khiển PID..............................................................................
16
2.Ứng dụng bộ điều khiển PID để nâng cao chất lượng cân băng định lượng............
18
Chương III..................................................................................................................
30
1. Giới thiệu về PLC....................................................................................................
30
2. Thiết bị khả trình PLC S7 300.................................................................................
30
3. Chương trình điều khiển..........................................................................................
36
Chương IV..................................................................................................................
44
1. Giới thiệu phần mềm giám sát wincc......................................................................
44
2. Xây dựng giao diện giám sát hệ thống....................................................................
45
1
1
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Chương V...................................................................................................................
47
LỜI NÓI ĐẦU
Trong công cuộc phát triển xây dựng cơ sở hạ tầng và xây dựng dân dụng
tăng lên nhanh chóng trên thế giới nói chung. Đặc biệt là sự bùng nổ về đầu tư
phát triển công nghiệp xi măng ở các nước đang phát triển, trong đó phải kể đến
là Việt Nam. Để đáp ứng yêu cầu ngày càng cao của người tiêu dùng về chất
lượng giá cả sự cạnh tranh trên thị trường, cho nên việc đầu tư cải tiến công
nghệ ở các công ty xí nghiệp đang là một giải pháp tốt cho việc cạnh tranh về
giá cả và chất lượng.
Với bất kỳ một nhà máy xi măng nào, nhất là đối với những nhà máy có mức độ
tự động hoá cao thì việc cân băng định lượng dùng giám sát, điều khiển các
thành phần phối liệu là vô cùng quan trọng, nó là một trong những yếu tố quyết
định đến năng suất của cả dây truyền và tỷ lệ các thành phần phối liệu nó ảnh
hưởng trực tiếp đến chất lượng xi măng sản xuất ra.
Nói đến tự động hoá ngày nay không thể không nhắc đến các thiết bị điều
khiển có lập trình. Trong đó PLC (Programmable Logic Controler) là một thiết
2
2
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
bị điển hình. Với những tính năng ưu việt như dễ dàng lập trình thông qua nhiều
kiểu ngôn ngữ (LADDER, STL, FBD), có thể thay đổi chương trình điều khiển
một cách đơn giản, khả năng truyền thông mạnh với môi trường bên ngoài (với
PC, PLC...), gọn nhẹ, làm việc tin cậy trong môi trường công nghiệp khắc nghiệt
... đã làm cho mọi quá trình sản xuất trở nên đơn giản và hiệu quả. Tạo nên mối
liên kết giữa điều khiển quá trình sản xuất và quản lý kinh doanh (hệ điều khiển
giám sát thu thập số liệu - DCS).
Tại các nhà máy xi măng hầu hết các công đoạn chính trên dây chuyền
sản xuất đều dùng PLC Simatic S7 – 300 của Siemens, các công đoạn sau đây
có dùng PLC S7-300: Máy rút liệu trong các kho đá vôi, đá sét, phụ gia, kho
than, cụm đóng bao và cảng nhà máy. Đặc biệt là hệ thống cân băng định lượng
trong nhà máy xi măng.
Với đề tài “Xây dựng hệ thống điều khiển giám sát cân băng định
lượng trong công nghệ sản xuất xi măng”.
Phạm vi đề cập của bản đồ án này là thiết kế hệ thống cân băng định
lượng trong nhà máy sản xuất xi măng. Bản đồ án này được thực hiện với sự
giúp đỡ, chỉ bảo tận tình của thầy giáo Nguyễn Đăng Khang . Nội dung của bản
đồ án này chắc chắn còn nhiều thiếu sót, em rất mong được tiếp thu những ý
kiến đóng góp bổ sung của các thầy cô giáo để bản đồ án của em được hoàn
chỉnh hơn.
Em xin chân thành cảm ơn!
3
3
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
CHƯƠNG I
Giới thiệu về công nghệ sản xuất xi măng và cân
băng định lượng trong sản xuất xi măng
1. Giới thiệu về công nghệ sản xuất xi măng.
1.1. Công đoạn chuẩn bị nguyên liệu.
Nguyên liệu để sản xuất xi măng chủ yếu là đá vôi, ngoài ra còn có các
loại phụ gia khác như than, đất, quặng sắt, thạch cao. Với điều kiện thuận lợi là
nguyên liệu ở gần sát nhà máy, đá sau khi được khai thác được hệ thống các
băng tải cao su vận chuyển về nơi tập kết và được phân loại (đá vôi đen, đá vôi
xanh), kiểm tra chất lượng. Đá đạt chất lượng có kích thước giới hạn là 350
mm.
Đá đã đạt chất lượng được đưa xuống các máng đá, từ các máng đá này,
được các băng tải xích tấm đưa đến các máy kẹp hàm đá để thực hiện công đoạn
đập đá lần thứ nhất. Sau khi qua các máy kẹp hàm này thì kích thước đá đạt kích
thước giới hạn là 80 mm.
Sau khi qua công đoạn đập đá lần 1, đá được hệ thống băng tải cao su đưa
vào máy đập búa để thực hiện công đoạn đập đá lần 2. Qua khỏi công đoạn này,
đá nguyên liệu đạt kích thước 25 mm và được hệ thống gàu tải xúc lên đổ vào
các xilo 1 và 2.
Các loại phụ gia khác thì được đưa từ các nơi về và tập kết ở kho chứa
phụ gia. qua công đoạn đập nhỏ, sấy, sàng phân loại để có được kích cỡ quy
định tạo điều kiện cho máy nghiền đạt năng suất sau đó được đổ vào các xilo
3và 4.
Riêng phụ gia đá thạch cao thì cũng như đá nguyên liệu (đá vôi) được
máy kẹp hàm đập nhỏ rồi được gàu tải xúc lên chứa trong xilo 5.
1.2. Công đoạn phối và nghiền nguyên liệu.
Đây là công đoạn quan trọng, quyết định chất lượng sản phẩm của công
nghệ sản xuất xi măng lò đứng. Đảm nhận công đoạn quan trọng này chính là hệ
thống cân băng định lượng điều khiển bằng máy vi tính. Hệ thống gồm 06 bộ
cân băng được đặt dưới đáy các xilo theo thứ tự từ cuối băng tải chính đến
miệng máy nghiền là : Đá 1, đá 2, than, quặng sắt, thạch cao. Nhiệm vụ chính
4
4
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
của các cân băng đáp ứng sự ổn định về lưu lượng và điều khiển lượng nguyên
liệu cấp này sao cho phù hợp với yêu cầu công nghệ đặt ra.
Nguyên liệu từ đáy các xilo được trút lên mặt các băng tải cân băng qua hệ
thống cấp liệu. Mỗi cân băng trong hệ thống nhận 1 nhiệm vụ khác nhau (vận
chuyển các nguyên liệu khác nhau với 1 lưu lượng khác nhau) nhằm mục đích
khống chế và điều chỉnh (tốc độ băng) sao cho lưu lượng liệu nhận được ứng với
giá trị đặt trước theo yêu cầu công nghệ sản xuất với sai số bé hơn hoặc bằng giá
trị cho phép.
Hệ thống 06 cân băng định lượng này đổ nguyên liệu lên 1 băng tải cao su
và băng tải này có nhiệm vụ vận chuyển nguyên liệu (đã được phối) đổ vào máy
ngiền bi thực hiện nghiền thành bột liệu. Các hạt bột liệu đạt tiêu chuẩn (về kích
thước) sẽ được hệ thống gàu tải xúc lên đổ vào cá xilo chứa, các hạt chưa đạt (có
độ mịn > 10% trên sàng 4900 lỗ/cm2 ) sẽ được máy phân ly đưa trở lại vào đầu
máy nghiền để nghiền lại.
Tỷ lệ phối liệu theo định mức sau:
Đá1:
từ (29 ÷ 37%)
Đá2 :
từ (32 ÷ 40%)
Quặng sắt :
6%
Than đá :
16%
Đất sét :
4%
Thạch cao :
5%
1.3. Công đoạn nung luyện clinke.
Đây cũng là 1 trong những công đoạn quyết định chất lượng của sản
phẩm. Bột liệu được lấy ra và được đồng nhất bằng hệ thống rút liệu,sau đó qua
hệ thống máy trộn ẩm đạt độ ẩm 60% rồi đưa vào máy vê viên kiểu sàng quay.
Những viên liệu có kích cỡ 6 → 8 mm sẽ được đổ xuống 1 băng tải cao su rồi
đưa vào hệ thống cấp liệu cho lò nung, các viên liệu được cấp vào lò bằng cách
rãi đều từng lớp một và được nung ở nhiệt độ 1500oc sau đó được rút ra bằng hệ
thống máy ghi xả. Lúc này các viên liệu đã trở thành clinke và dính vào nhau
thành từng tảng có kích thước khoảng 80 → 100 mm. Hệ thống ghi xả sẽ xả
clinke nóng lên băng tải xích tấm đặt ngay dưới đáy lò và các tảng clinke được
đưa vào máy kẹp hàm clinke để đập nhỏ. Tuỳ theo chất lượng clinke tốt hay xấu
mà được đưa vào chứa trong các xilo riêng (Để sau này rút ra và phối với các
lượng phụ gia khác nhau.
5
5
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
1.4. Công đoạn nghiền clinke thành ximăng thành phẩm và đóng bao xi
măng.
Clinke sau khi được các bộ phận chức năng kiểm tra chất lượng, clinke
được hệ thống cân băng định lượng phối cùng với các thành phần đá mỡ, thạch
cao, đất pháp cổ, xỉ bông theo một tỷ lệ nhất định, sau đó được hệ thống băng tải
cao su đưa vào máy nghiền bi. Sản phẩm sau máy nghiền chính là xi măng thành
phẩm. Các hạt xi măng chưa đạt (có độ mịn > 10% trên sàng 4900 lỗ/cm2 ) sẽ
được máy phân ly đưa trở lại vào đầu máy nghiền để nghiền lại. Sản phẩm xi
măng đạt chất lượng được đổ vào các xilo 14, 15, 16. Sau khi để nguội thì được
đưa vào máy đóng bao, thành phẩm được đóng kho kết thúc quy trình sản xuất.
2. Cân băng định lượng trong công nghệ sản xuất xi măng
2.1. Khái niệm:
Cân băng định lượng là bao gồm các thiết bị ghép nối với nhau mà thành,
cân băng định lượng của nhà máy sản xuất xi măng là cân định lượng băng tải,
được dùng cho hệ thống cân liên tục (liên tục theo chế độ dài hạn lặp lại). Thực
hiện việc phối liệu một cách liên tục theo tỷ lệ yêu cầu công nghệ đặt ra.
Trong các nhà máy sản xuất công nghiệp, các dây chuyền sản xuất xi
măng, hệ thống cân băng định lượng còn đáp ứng sự ổn định về lưu lượng liệu
và điều khiển lượng liệu cho phù hợp với yêu cấu, chính vì nó đóng một vai trò
rất quan trọng trong việc điều phối và hoạch định sản xuất, do đó nó quyết định
vào chất lượng sản phẩm, góp phần vào sự thành công của công ty.
Cân băng định lượng trong nhà máy sản xuất xi măng là cân băng tải, nó là
thiết bị cung cấp kiểu trọng lượng vật liệu được chuyên trở trên băng tải mà tốc
độ của nó được điều chỉnh để nhận được lưu lượng vật liệu ứng với giá trị do
người vận hành đặt trước.
6
6
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
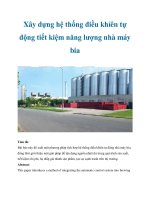
2.2. Cấu tạo của cân băng định lượng :
1
3
6
7
8
9
4
10
2
5
Hình 1.1: Sơ đồ cấu tạo cân băng định lượng.
Cấu tạo của cân băng định lượng gồm các phân sau:
1: Phễu cấp liệu
2: Cảm biến trọng lượng (Load Cell).
3: Băng truyền.
4: Tang bị động.
5: Bulông cơ khí.
6: Tang chủ động.
7: Hộp số.
7
7
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
8: SenSor đo tốc độ.
9: Động cơ không đống bộ (được nối với biến tần)
10: Cảm biến vị trí
2.3. Tế bào cân đo trọng lượng:
Là thiết bị đo trọng lượng trong hệ thống cân định lượng bao gồm 2 loại tế
bào là loại SFT (Smat Foree Tran Sduer) và tế bào cân Tenzomet.
2.4. Nguyên lý tế bào cân số SFT:
Bộ chuyển đổi
Cảm biến
nhiệt độ
Bộ vi xử lý
N
S
S
N
Tải trọng cần đo
Ngưỡng hạn
chế
Dây rung
Giao thức truyền tin nối tiếp
Hình 2.1: Sơ đồ tế bào cân số SFT
8
8
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Đầu đo trọng lượng là nơi đặt tải cần đo, nó truyền lực tác động trực tiếp của
tải lên một đây dẫn đặt trong từ trường không đổi. Nó làm thay đổi sức căng của
dây dẫn nên dây dẫn bị dao động (bị rung). Sự dao động của dây dẫn trong từ
trường sinh ra sức điện động cảm ứng. Sức điện động này có tác động chặt chẽ
lên tải trọng đặt trên đầu đo.
Đầu cảm biến nhiệt độ xác định nhiệt độ của môi trường để thực hiện việc
chỉnh định vì các phần tử SFT phụ thuộc vào rất nhiều vòng nhiệt độ.
Bộ chuyển đổi : Chuyển đổi các tín hiệu đo lường từ đầu đo thành dạng tín
hiệu số.
Bộ xử lý : Xử lý tất cả các tín hiệu thu được và các tín hiệu ra bên ngoài theo
phương thức truyền tin nối tiếp.
Bảng thống kê một số loại tế bào
Tải định mức
20kg
30kg
100kg
120kg
200kg
300kg
Tải cực đại
30kg
45kg
150kg
180kg
300kg
450kg
-10÷60oc
-10÷40oc
-10÷60oc
-10÷40oc
-10÷60oc
RS 422
RS 485
RS 422
RS 485
RS 422
RS 485
RS 422
RS 485
RS 422
RS485
1w
1w
1w
1w
1w
500m
500m
500m
500m
500m
5g
0,0001%
0,0001%
0,0001%
0,0001%
Phạm vi nhiệt độ -10÷ 60oc
cho phép
Giao thức truyền RS 422
tin nối tiếp với bên RS 485
ngoài
Năng lượng tiêu
1w
thụ
Khoảng ghép nối
500m
Độ phân giải
3,4g
2.5. Nguyên lý tế bào cân Tenzomet:
9
9
Nhóm 32
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
R-ΔR
R +ΔR
R+ΔR
R-ΔR
UN
Ur
Hình 2.2: Sơ đồ cầu tế bào cân Tezomet.
Nguyên lý tế bào cân Tenzomet dựa theo nguyên lý cầu điện trở, trong đó giá
trị điện trở của các nhánh cầu thay đổi bởi ngoại lực tác động lên cầu. Do đó nếu
có một nguồn cung cấp không đổi (UN=const) thì hai đường chéo kia của cầu ta
thu được tín hiệu thay đổi theo tải trọng đặt lên cầu. Khi cầu cân bằng thì điện
áp ra Ur=0. Khi cầu điện trở thay đổi với giá trị ΔR thì điện áp ra sẽ thay đổi, lúc
này điện áp ra được tính theo công thức.
ΔR
( 2.1)
Ur=UN *
R
Trong đó: UN - điện áp nguồn cấp cho đầu đo
Ur - điện áp ra của đầu đo
ΔR - lượng điện trở thay đổi bởi lực kéo trên đầu đo
R - giá trị điện trở ban đầu của mỗi nhánh cầu.
10
Nhóm 32
10
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
với R tỷ lệ với khối lượng vật liệu trên băng cân thì thấy tín hiệu U ra là khuyếch
đại nên sau đó gửi tín hiệu này qua biến đổi A/D vào bộ điều khiển để xử lý.
Giả sử cấp cho đầu vào cầu cân một điện áp là U N=10v thì cứ 100kg vật liệu
trên băng LoadCell sẽ chuyển thành 2mv/v tương ứng. Lúc này, điện áp ra của
cầu cân sẽ là Ura=20mv
Bảng thống kê một số tế bào cân Tenzomet
Tải định mức
Tải cực đại
Sai số
Phạm vi điều chỉnh
Nguồn cung cấp
20
30
50 70 100 150 250 300
150% tải định mức
< 0.015%
-10 ÷ 40
-10 ÷ 15
2.6. Chuẩn bì:
Sau khi đã chỉnh định cảm biến trọng lượng thì tiến hành chuẩn bì cho cân
bằng cách thực hiện chức năng (chuẩn bì tự động ). Xác định sự trượt của băng
trong lúc trừ bì băng tải rỗng, bộ điều khiển ghi vào bộ nhớ số phân đoạn thực
của băng tải giữa 2 lần quay lại của thiết bị định vị (Belt in dex) và so sánh với
phân đoạn đã ghi trong bộ nhớ. Nếu có sự sai khác tức là đã có sự trượt của băng
trên puly truyền động và bộ điều khiển sẽ báo động.
2.7. Nguyên lý tính lưu lượng của cân băng định lượng:
2.7.1. Nguyên lý tính lưu lượng:
Cân băng định lượng (cân băng tải) là thiết bị cung cấp liệu kiểu trọng
lượng.Vật liệu được chuyên trở trên băng tải, mà tốc độ của băng tải được điều
chỉnh để nhận được lưu lượng đặt trước khi có nhiều tác động liên hệ(liệu không
xuống đều).
Cầu cân về cơ bản bao gồm : Một cảm biến trọng lượng (LoadCell) gắn
trên giá mang nhiều con lăn. Trọng lượng của vật liệu trên băng được bốn cảm
biến trọng lượng (LoadCell) chuyển đổi thành tín hiệu điện đưa về bộ xử lý để
tính toán lưu lượng.
Để xác định lưu lượng vật liệu chuyển tới nơi đổ liệu thì phải xác định
đồng thời vận tốc của băng tải và trọng lượng của vật liệu trên 1 đơn vị chiều
11
Nhóm 32
11
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
dài. Trong đó tốc độ của băng tải được đo bằng cảm biến tốc độ có liên hệ động
học với động cơ.
Tốc độ băng tải V (m/s) là tốc độ của vật liệu được truyền tải. Tải của
băng truyền là trọng lượng vật liệu được truyền tải trên một đơn vị chiều dài
∂ (kg/m).
Cân băng tải có bộ phận đo trọng lượng để đo ∂ và bộ điều khiển để điều chỉnh
tốc độ băng tải sao cho điểm đổ liệu, lưu lượng dòng chảy liệu bằng giá trị đặt
do người vận hành đặt trước.
Bộ điều khiển đo tải trọng trên băng truyền và điều chỉnh tốc độ băng đảm bảo
lưu lượng không đổi ở điểm đổ liệu.
Q=ƍ*V
(2.2)
Trọng lượng tổng trên băng là lực F c(N) được đo bởi hệ thống cân trọng lượng
và ∂, được tính theo biểu thức:
=
ƍ
(2.3)
FC
L
g
2
trong đó : L - chiều dài của cầu cân
g - gia tốc trọng trường (g=9,8 m/s2)
Lực hiệu dụng Fm(N) do trọng lượng của vật liệu trên băng tải gây nên:
(2.4)
Fm =Fc – F0
Trong đó : F0 – là lực đo trọng lượng của băng tải cả con lăn và giá đỡ cầu cân.
Tải trọng trên băng truyền có thể tính là:
ƍ=S*γ
(2.5)
Trong đó : γ - khối lượng riêng của vật liệu (kg/m3)
S - tiết diện cắt ngang của vật liệu trên băng (m2)
Do đó lưu lượng có thể tính là:
(2.6)
12
Nhóm 32
Fc * V 2 Fc * V
=
L
L*g
g
Q= 2
12
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
2.7.2. Đo trọng lượng liệu trên băng tải:
Trọng lượng đo nhờ tín hiệu của LoadCell bao gồm trọng lượng của băng tải
và trọng lượng vật liệu trên băng. Vì vậy để đo được trọng lượng của liệu thì ta
phải tiến hành trừ bì (tức là trừ đi trọng lượng của băng tải ).
Bộ điều khiển xác định trọng lượng của liệu nhờ trừ bì tự động các phân đoạn
băng tải.
* Nguyên lý của quá trình trừ bì như sau :
Băng tải phải được chia thành các phân đoạn xác định. Trong lúc trừ bì băng
tải rỗng (không có liệu trên băng) trọng lượng của mỗi đoạn băng được ghi vào
bộ nhớ. Khi vận hành bình thường cân băng tải trọng lượng của mỗi vật liệu trên
mỗi phân đoạn được xác định bằng cách lấy trọng lượng đo được trên đoạn đó
trừ đi trọng lượng băng tải tương ứng đã ghi trong bộ nhớ. Điều này đảm bảo
cân chính xác trọng lượng liệu ngay cả khi dùng băng tải có độ dày không đều
trên chiều dài của nó. Việc điều chỉnh trọng lượng cần phải thực hiện đồng bộ
với vị trí của băng (belt index được gắn trên băng) mới bắt đầu thực hiện trừ bì.
Khi ngừng cân vị trí của băng tải được giữ lại trong bộ nhớ do đó ở lần khởi
động tiếp theo việc trừ bì được thực hiện ngay.
2.8. Khái quát về điều chỉnh cấp liệu cho cân băng:
Việc điều chỉnh cấp liệu cho băng cân định lượng chính là điều chỉnh lưu lượng
liệu cấp cho băng cân.
*Thực hiện bằng 3 phương pháp:
- Phương pháp 1: Điều chỉnh cấp liệu kiểu trôi
Phương pháp này điều chỉnh cấp liệu bằng tín hiệu của sensơr cấp liệu kiểu trôi
để điều khiển 5 thiết bị cấp liệu.
Vị trí của sensơr cấp liệu theo kiểu trôi được đặt ở phía cuối của ống liệu.
- Phương pháp 2: Điều chỉnh cấp liệu liên tục.
Phương pháp này điều chỉnh cấp liệu liên tục cho băng cân định lượng sử
dụng bộ điều chỉnh PID để điều chỉnh cấp liệu (có thể là van cấp liệu hoặc van
13
Nhóm 32
13
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
quay) để đảm bảo cho lượng tải trên một đơn vị chiều dài băng tải là không đổi.
Bộ PID có tác dụng điều chỉnh nếu lưu lượng thể tích của liệu trên băng thay đổi
theo phạm vi ±15% và bộ PID chỉ hoạt động sau khi băng đã hoạt động.
* Nhận xét 2 phương pháp trên:
Hai phương pháp trên điều chỉnh cấp liệu khác hẳn nhau về bản chất. Xét
về độ chính xác điều chỉnh thì phương pháp 2 hơn hẳn phương pháp 1, thời gian
điều chỉnh nhỏ, thiết bị cấp liệu làm việc ổn định không bị ngắt quãng, nhưng
phạm vi điều chỉnh không rộng. Phương pháp 1 đơn giản hơn, phạm vi điều
khiển rộng hơn và có thể dược đặt bởi người sử dụng, nhưng trong phạm vi điều
chỉnh thiết bị phải làm việc gián đoạn thì ảnh hưởng không tốt đến tuổi thọ của
thiết bị.
- Phương pháp 3: Điều chỉnh mức vật liệu trong ngăn xếp:
Phương pháp điều chỉnh mức liệu trong ngăn xếp có thể coi là sự kết hợp của
2 phương pháp trên : phương pháp điều chỉnh gián đoạn và điều chỉnh liên tục.
Phương pháp này tận dụng những ưu điểm và khắc phục nhưng nhược điểm của
2 phương pháp trên và được thiết kế đặc biệt cho các băng cân định lượng.
2.9. Cấu trúc của một hệ cân:
2.9.1. Cấu tạo chung của hệ cân:
Hệ cân Đ2
Hệ cân Đ1
Hệ cân than
Hệ cân quoặng
Hệ cân đất
Hệ cân thạch cao
Băng tải chính
14
Nhóm 32
14
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Hình 1.3. Sơ đồ cấu trúc của một hệ thống
Cấu tạo của hệ thống bao gồm:
1- Gồm 06 hệ cân liệu từ đá Đ 1 cho tới Thạch cao .Các cân này có
kích thước: chiều dài là 3910mm, rộng 1250mm, cao 1150mm, chiều rộng mặt
băng 650mm, tốc độ của băng 0.5÷1m/s, sơ đồ cấu tạo như hình 1.1, hệ truyền
động sử
dụng hai loại động cơ đó là 1.5kw và 0.75kw, tốc độ của động cơ truyền động
đều là
:
Hiệu suất hộp số :
nd : 970 v/p
η2 : 0,8
Tỷ số truyền giữa băng răng 1 và 2:
40
= 1,5
i = 26
Cấu trúc của một hệ cân trên dây chuyền bao gồm 06 hệ thống cân băng và một
băng tải chính, trong quá trình làm việc 06 cân băng trên sẽ đồng thời đổ liệu
xuống băng tải chính, toàn bộ phối liệu được băng tải chính vận chuyển vào Silô
trộn để đưa vào máy nghiền.
15
Nhóm 32
15
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
CHƯƠNG II
Ứng dụng bộ điều khiển PID để nâng cao chất lượng
cân băng định lượng
1. Giới thiệu về bộ điều khiển PID
Bộ điều khiển PID: Proportional(tỉ lệ) Integral(tích phân) Derivative(đạo
hàm) là giải thuậtđiều khiển được dùng nhiều nhất trong các ứng dụng điều
khiển tự động với yêu cầu chính xác (accurate), nhanh (fast response), ổn
định (small overshot).
Hình 2.1: Bộ điều khiển PID
PID là một cơ chế phản hồi vòng điều khiển tổng quát được sử dụng rộng rãi
trong các hệ thống điều khiển công nghiệp – bộ điều khiển PID được sử dụng
phổ biến nhất trong số các bộ điều khiển phản hồi. Một bộ điều khiển PID tính
toán một giá trị "sai số" là hiệu số giữa giá trị đo thông số biến đổi và giá trị
đặt mong muốn. Bộ điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều
chỉnh giá trị điều khiển đầu vào. Trong trường hợp không có kiến thức cơ bản về
quá trình, bộ điều khiển PID là bộ điều khiển tốt nhất. Tuy nhiên, để đạt được
kết quả tốt nhất, các thông số PID sử dụng trong tính toán phải điều chỉnh theo
tính chất của hệ thống-trong khi kiểu điều khiển là giống nhau, các thông số phải
phụ thuộc vào đặc thù của hệ thống.
16
Nhóm 32
16
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Một điều rất tự nhiên, với yêu cầu nhanh thì một cách đơn giản để công thức
hóa ý tưởng này là dùng quan hệ tuyến tính:
F=Kp*e
Trong đó Kp là một hằng số dương nào đó mà chúng ta gọi là hệ số P
(Propotional gain), e là sai số cần điều khiển. Mục tiêu điều khiển là đưa e (sai
số) tiến về 0 càng nhanh càng tốt. Rõ ràng nếu Kp lớn thì tác động nhanh của
điều khiển cũng càng lớn. Tuy nhiên, do quán tính mà việc điều khiển càng
nhanh càng gây ra tính mất ổn định (do lực quán tính và lực điều khiển tạo ra
cặp đối lực xuất hiện ở hai khoảng thời gian liên tiếp nhau => chúng tạo ra dao
động không kiểm soát được).
Như vậy, ta sẽ sử dụng đạo hàm của sai số e để làm tăng giá trị nhưng ngược
chiều của lực F (vì e đang giảm nhanh dần). Nếu sử dụng đạo hàm làm thành
phần “thắng” thì có thể giảm được overshot của xe. Thành phần “thắng” này
chính là thành phần D (Derivative) trong bộ điều khiển PID mà chúng ta đang
khảo sát. Thêm thành phần D này vào bộ điều khiển P hiện tại, chúng ta thu
được bộ điều khiển PD như sau:
F=Kp*e + Kd*(de/dt)
Trong đó (de/dt) là vận tốc thay đổi của sai số e và Kd là một hằng số không âm
gọi là hệ số D (Derivative gain).
Sự hiện diện của thành phần D làm giảm overshot vật thể điều khiển khi nó tiến
gần về vị trí cân bằng (vị trí ổn định), lực F gồm 2 thành phần Kp*e > =0 (P) và
Kd*(de/dt) <=0 (D). Trong một số trường hợp thành phần D có giá trị lớn hơn
thành phần P và lực F đổi chiều, “thắng” (hãm tốc) lại, yếu tố cần điều khiển (ví
dụ vận tốc, vị trí...) của vật thể giảm mạnh ở gần vị trí cân bằng. Một vấn đề nảy
sinh là nếu thành phần D quá lớn so với thành phần P hoặc bản thân thành phần
P nhỏ thì khi tiến gần điểm cân bằng (chưa thật sự đến vị trí này), vật thể có thể
dừng hẳn, thành phần D bằng 0 (vì sai số e không thay đổi nữa), lực F = Kp*e.
Trong khi Kp và e lúc này đều nhỏ nên lực F cũng nhỏ và có thể không thắng
được lực ma sát tĩnh. Sai số e trong tình huống này gọi là steady state error (tạm
dịch là sai số trạng thái tĩnh). Để tránh steady state error, người ta thêm vào bộ
điều khiển một thành phần có chức năng “cộng dồn” sai số. Khi steady state
error xảy ra, 2 thành phần P và D mất tác dụng, thành phần điều khiển mới sẽ
“cộng dồn” sai số theo thời gian và làm tăng lực F theo thời gian. Đến một lúc
nào đó, lực F đủ lớn để thắng ma sát tĩnh và đẩy vật tiến tiếp về điểm cân bằng.
17
Nhóm 32
17
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Thành phần “cộng dồn” này chính là thành phần I (Integral - tích phân) trong bộ
điều khiển PID. Vì chúng ta điều biết, tích phân một đại lượng theo thời gian
chính là tổng của đại lượng đó theo thời gian. Bộ điều khiển đến thời điểm này
đã đầy đủ là PID:
F=Kp*e + Kd*(de/dt)+Ki*∫edt
Như vậy, chức năng của từng thành phần trong bộ điều khiển PID giờ đã rõ. Tùy
vào mục đích và đối tượng điều khiển mà bộ điều khiển PID có thể được lượt
bớt để trở thành bộ điều khiển P, PI hoặc PD. Công việc chính của người thiết kế
bộ điều khiển PID là chọn các hệ số Kp, Kd và Ki sao cho bộ điều khiển hoạt
động tốt và ổn định (quá trình này gọi là PID gain tuning). Đây không phải là
việc dễ dàng vì nó phụ thuộc vào nhiều yếu tố. Tôi tóm tắt một kinh nghiệm cơ
bản khi chọn các hệ số cho PID như sau:
- Chọn Kp trước: thử bộ điều khiển P với đối tượng thật (hoặc mô phỏng), điều
chỉnh Kp sao cho thời gian đáp ứng đủ nhanh, chấp nhận overshot nhỏ.
- Thêm thành phần D để loại overshot, tăng Kd từ từ, thử nghiệm và chọn giá trị
thích hợp.
- Thêm thành phần I để giảm steady state error. Nên tăng Ki từ bé đến lớn để
giảm steady state error đồng thời không để cho overshot xuất hiện trở lại.
2. Ứng dụng bộ điều khiển PID để nâng cao chất lượng cân băng định
lượng
2.1. Yêu cầu
Hệ thống cân băng định lượng là một trong những khâu quan trọng giúp
cho nhà máy hoạt động một cách liên tục. Cân băng định lượng là một khâu
trong dây chuyền công nghệ nhằm cung cấp chính xác lượng nguyên liệu cần
thiết cho nhà máy, lượng nguyên liệu này đã được người lập trình cài đặt một
giá trị trước. Khi mà lượng nguyện liêu trên băng tải ít đi thì đòi hỏi phải tăng
tốc động cơ lên để băng tải chuyển động nhanh hơn nhằm cung cấp đủ lượng
nguyên liệu cần thiết. Ngược lại khi lượng nguyên liệu trên băng tải vận
chuyển với lưu lượng nhiều thì các thiết bị tự động sẻ tự động điều khiển cho
động cơ quay với tốc độ chậm lại phù hợp với yêu cầu.
2.2. Xây dựng nguyên lý đo khối lượng của cân băng định lượng.
Khối lượng của vật liệu được cơ cấu cân định lượng cân chính xác theo lượng
đặt ban đầu. Năng suất của băng tải được tính theo biểu thức:
Q = δ.v [ kg/s ]
(1)
Hay
Q=(3600.v)/1000
Trong đó
18
Nhóm 32
18
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
δ : khối lượng tải theo chiều dài [kg/m]
v : tốc độ di chuyển của băng [m/s]
Khối lượng của băng tải theo chiều dài được tính theo công thức:
3
(2)
δ = S.γ.10
Trong đó:
γ: Khối lượng riêng của vật liệu [tấn/m3]
S: Tiết diện cắt ngang của vật liệu trên băng
[m2]
2.3.
Xây dựng hệ thống truyền động cho hệ
thống cân băng
Từ những đặc điểm công nghệ, yêu cầu truyền động của cân băng
thì ta có các phương án truyền động sau:
- Hệ thống truyền động chỉnh lưu điều khiển thyristor- động cơ 1 chiều (Hệ TĐ).
- Hệ thống điều chỉnh xung áp - động cơ 1 chiều (Hệ XA-Đ).
- Hệ thống truyền động vécto biến tần động cơ không đồng bộ ba pha.
Trong những năm gần đây, hệ thống điều chế độ rộng xung PWM do các linh
kiện bán dẫn tạo thành sử dụng các transito GTO, GTR và P-MOSFET, chúng
có rất nhiều ưu điểm: (1) mạch điện chính đơn giản, các linh kiện công suất ít;
(2) tần số đóng mở cao, dòng điện dễ giữ được liên tục, sóng hài ít, tổn hao và
phát nhiệt của động cơ khá nhỏ; (3) có khả năng vận hành ở tốc độ thấp, độ
chính xác cao khi tốc độ ổn định, vì vậy phạm vi điều tốc rộng; (4) dải tần của
hệ thống rộng, tính thích nghi nhanh nhậy rất tốt, khả năng chống nhiễu
trạng thái động mạnh; (5) các linh kiện của mạch điện chính làm việc ở trạng
thái đóng mở, tổn hao khi mở thông nhỏ, hiệu suất thiết bị khá cao; (6) dòng
điện một chiều khi sử dụng hệ thống chỉnh lưu ba pha không điều khiển được,
hệ số công suất của mạng cao. Từ những ưu điểm nổi trội của hệ thống xung
điện áp do đó trong đề tài này chọn hệ thống xung điện áp làm hệ truyền
động cho hệ thống điều tốc.
19
Nhóm 32
19
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Hình 2.2: Sơ đồ khối hệ thống truyền động điều chế độ rộng xung một chiều
2.4.
Tổng hợp hệ thống
Để phù hợp với yêu cầu của hệ truyền động, qua phân tích cơ cấu cân băng, ta
thấy rằng hệ truyền động này bao gồm ba mạch vòng điều chỉnh, đó là mạch
vòng điều chỉnh dòng điện, mạch vòng điều chỉnh tốc độ và mạch vòng điều
chỉnh năng suất.
Hình 2.3: Sơ đồ cấu trúc của hệ thống tự động điều khiển cân băng
Trong đó:
- Q là lượng đặt năng suất.
- W
là hàm truyền của khâu động cơ.
c(p)
-
W
là hàm truyền của bộ điều chế độ rộng xung
pwm
20
Nhóm 32
20
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
là hàm truyền của bộ điều khiển dòng.
-
W
RI
-
W là hàm truyền của bộ điều chỉnh tốc độ.
R
-
W
là hàm truyền của bộ điều năng suất.
R
Mô phỏng hệ truyền động cân băng khi sử dụng bộ điều khiển PID.
Các thông số hệ truyền động:
Loại động cơ: H-68 do Nga sản xuất với các thông số như sau:
P : Công suất định mức của động cơ là
đm
1,45 kW
U : Điện áp định mức của động cơ là 220 V I : Dòng điện định
đm
đm
mức của động cơ 8,5 A I : Dòng kích từ động cơ 0,57 A
kt
- L : Điện cảm phần ứng 0,1944 H R: Điện trở phần ứng 6.7
ư
- T : Hằng số thời gian của máy biến dòng
i
0,0025 s
T: Chu kỳ của điện áp ra được chọn 0,0033s
T : Hằng số thời gian của mạch điều khiển bộ chỉnh lưu 0,00015 s
đk
T : Hằng số thời gian của máy phát tốc
0,0015 s
T : Hằng số thời gian của bộ cảm biến vị trí
0,3 s
: Hiệu suất định mức của động cơ 80%
đm
Sử dụng công cụ Simulink của Matlab, xây dựng mô hình mô phỏng mạch
vòng điều chỉnh năng suất và mạch vòng điều chỉnh tốc độ (trong đó bao
gồm cả mạch vòng điều chỉnh dòng điện) của hệ thống truyền động điện sử
dụng bộ điều chế độ rộng xung điện áp. Đồng thời, để đơn giản cho quá trình
mô phỏng ta chọn các khâu phản hồi tốc độ có
=1, phản hồi vị trí có =1 như hình 3 với
bộ điều chỉnh tốc độ là khâu PI.
21
Nhóm 32
21
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Hình 2.4: Sơ đồ mô phỏng hệ điều khiển bằng bộ điều khiển PID
Kết quả mô phỏng được thể hiện dưới đây đáp ứng được các yêu cầu kỹ
thuật đề ra:
22
Nhóm 32
22
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
Hình 2.5: Kết quả mô phỏng với chỉ tiêu tốc độ, dòng điện và năng suất
4.8. Thuật toán PID
Trong quá trình vận hành một bộ điều khiển PID sẽ điều chỉnh giá trị của kết quả đầu
ra sao cho từ đó nó có thể giảm sai lệch (e) trở về 0. Cách xác định sai lệch được xác
định bằng việc xác định sự khác nhau giữa giá trị đặt và giá trị thực. Nguyên tắc tính
toán của bộ điều khiển PID dựa trên cơ sở hàm sau (thể hiện giá trị đầu ra), M(t) là
hàm bao gồm một hàm tỷ lệ, một hàm tích phân và một hàm vi phân.
Trong đó
M(t) là tín hiệu ra
Kc là hệ số khuyếch đại
e
là giá trị sai lệch
Minnial là giá trị ban đầu của đầu ra
Để thực hiện chức năng điều khiển trong một máy tính kỹ thuật số thì các hàm liên tục
phải được lượng hoá thành các mẫu định kỳ của giá trị sai lệch cùng với giá trị tính
toán của đầu ra. Hàm số dưới đây là cơ sở cho quá trình điều khiển bằng máy tính số
hoá:
Trong đó
Mn là giá trị đầu ra đã được tính toán tại thời điểm lấy mẫu n
KC là hệ số tỷ lệ
en
là giá trị sai lệch tai thời diểm lấy mẫu n
en-1 là giá trị sai lệch tai thời diểm lấy mẫu n-1
KI
là hệ số tích phân
Minnial là giá trị ban đầu của đầu ra
KD là hệ số vi phân
Từ hàm này suy ra số tích phân sẽ được thể hiện là một hàm của tất cả các giá trị sai
lệch bao gồm từ mẫu đầu tiên cho đến mẫu hiện tại. Hàm vi phân ở đây là một hàm
của sai lệch hiện tại và sai lệch trước đó còn hàm tỷ lệ chỉ là một hàm của sai lệch hiện
tại. PLC không bao giờ lưu tất cả các giá trị sai lệch bởi vì điều đó không cần thiết.
Mỗi khi phát hiện sai lệch thì sẽ phải tính toán giá trị đầu vào ngay ở mẫu đầu tiên vì
vậy chỉ cần lưu giá trị sai lệch trước đó và giá trị của các hàm tích phân. Do tính chất
23
Nhóm 32
23
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
giửi lặp đi lặp lại của PLC nên người ta đã làm đơn giản hoá hàm để có thể giải quyết
được mẫu sai lệch này.
Phương trình đơn giản hoá là:
Trong đó
Mn là giá trị đầu ra đã được tính toán tại thời điểm lấy mẫu n
KC là hệ số tỷ lệ
en
là giá trị sai lệch tai thời diểm lấy mẫu n
en-1 là giá trị sai lệch tai thời diểm lấy mẫu n-1
KI
là hệ số tích phân
MX là giá trị của đầu ra tại n-1
KD là hệ số vi phân
CPU sử dụng một hình thức của hàm đã được đơn giản hoá trên khi tính toán giá trị
đầu ra của vòng điều khiển
Hàm đơn giản là:
Trong đó
Mn là giá trị đầu ra đã được tính toán tại thời điểm n
MPn là giá trị của khâu tỷ lệ tại thời điểm n
MIn là giá trị của khâu tích phân tại thời điểm n
MDn là giá trị của khâu tích phân tại thời điểm n
*Hàm tỷ lệ:
Giá trị tỷ lệ MP là kết quả giá trị đạt được giá trị này điều khiển độ nhạy bén của việc
tính toán và giá trị sai lệch (được tính bằng sự khác nhau giữa giá trị đặt và giá trị thực
tại một thời điểm cho trước). Hàm trị tỷ lệ được CPU xử lý là:
Trong đó
MPn là giá trị đầu ra của khâu tỷ lệ tại thời điểm n
KC là hệ số tỷ lệ
SPn là giá trị đặt tại thời điểm n
PVn là giá trị thực tại thời điểm n
*Hàm tích phân:
Giá trị đầu ra của khâu tích phân MI tỷ lệ tích phân với sai lệch Hàm của tích phân
được CPU xử lý là:
Trong đó
MIn là giá trị đầu ra của khâu tích phân tại thời điểm n
KC là hệ số tích phân
24
Nhóm 32
24
GVHD: Nguyễn Đăng Khang
ĐỒ ÁN CHUYÊN MÔN TỰ ĐỘNG HÓA
TS là thời gian lấy mẫu
TI là hệ số thời gian tích phân
SPn là giá trị đặt tại thời điểm n
PVn là giá trị thực tại thời điểm n
MX là giá trị của hàm tích phân tại thời điểm n-1
Tổng tích phân (MX) là tổng các giá trị trước đó đang chạy của giá trị tích phân. Sau
mỗi lần tích toán Minm tổng tích phân sẽ được cập nhật bằng giá trị Min đã được điều
chỉnh (xem phần Biến số và phạm vi để biết thêm chi tiết). Giá trị ban đầu của tổng
tích phân được đặt theo giá trị đầu ra Minnitial ngày trước quá trình tính toán đầu ra
vòng đầu tiên. Giá trị tích phân gồm một vài hằng số như hệ số tích phân và hằng số
thời gian mà trong một thời gian quét một vòng mà PID tính lại giá trị đầu ra và tích
phân thời gian (Ti) mà trong một khoảng thời gian cần để điều khiển sự tác động của
hàm tích phân trong việc tính toán đầu ra.
*Hàm vi phân:
Hàm vi phân MD tỷ lệ thuận với sự thay đổi của sai lệch. Hàm dưới đâythể hiện giá trị
vi phân.
Để tránh sự thay đổi bất thường của đầu ra do việc phát sinh những thay đổi trong
điểm đặt, hàm này được điều chỉnh để giá trị đặt là một hằng số (SPn = SPn-1). Điều
này sẽ có hiệu quả trong việc tính toán sự thay đổi giá trị thực chứ không phải thay đổi
sai lệch dưới đây:
hoặc chỉ là:
Trong đó
MDn là giá trị đầu ra của khâu vi phân tại thời điểm n
Kc là hệ số
Ts
là thời gan mẫu
Td
là thời gian vi phân
SPn là giá trị đặt tại thời điểm n
SPn-1 là giá trị đặt tại thời điểm n-1
PVn là giá trị thực tại thời điểm n
PVn-1 là giá trị thực tại thời điểm n-1
CPU phải lưu giá trị thực chứ không lưu sai lệch để sử dụng trong việc tính toán giá trị
vi phân tiếp sau đó. Trong lần lấy mẫu đầu tiên giá trị PVn-1được coi là tương đương
với giá trị PVn.
Lựa chọn vòng điều khiển: Trong nhiều hệ thống điều khiển người ta thường sử dụng
một hoặc hai vòng điều khiển. Ví dụ người ta có thể sử dụng vòng điều khiển tỷ lệ
hoặc điều khiển tỷ lệ và tích phân.Việc lựa chọn vòng điều khiển được thực hiện bằng
25
Nhóm 32
25
GVHD: Nguyễn Đăng Khang