nghiên cứu và mô phỏng sự truyền công suất trong hệ thống truyền lực xe nhiều cầu chủ động
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.74 MB, 69 trang )
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
LUẬN VĂN THẠC SĨ
TRẦN QUỐC KHÁNH
NGHIÊN CỨU VÀ MÔ PHỎNG SỰ TRUYỀN CÔNG SUẤT
TRONG HỆ THỐNG TRUYỀN LỰC XE NHIỀU CẦU CHỦ ĐỘNG
NGÀNH: KHAI THÁC VÀ BẢO TRÌ Ô TÔ MÁY KÉO - 605246
S K C0 0 1 0 0 1
Tp. Hồ Chí Minh, tháng 08/2004
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
LUẬN VĂN THẠC SĨ
NGHIÊN CỨU VÀ MÔ PHỎNG SỰ TRUYỀN
CÔNG SUẤT TRONG HỆ THỐNG TRUYỀN LỰC
XE NHIỀU CẦU CHỦ ĐỘNG
Chuyên ngành: Khai thác và bảo trì ô tô
Mã số ngành: 605246
Người thực hiện: KS. TRẦN QUỐC KHÁNH
Người hướng dẫn:
TS. LÂM MAI LONG
Tp.Hồ Chí Minh, tháng 08 năm 2004
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
CÔNG TRÌNH ĐƯC HOÀN THÀNH TẠI
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
Cán bộ hướng dẫn khoa học : TS. LÂM MAI LONG
Cán bộ chấm nhận xét 1: TS. NGUYỄN NƯỚC
Cán bộ chấm nhận xét 2: TS. LÊ XUÂN HOÀ
Luận văn thạc só được bảo vệ
HỘI ĐỒNG CHẤM BẢO VỆ LUẬN VĂN THẠC SĨ
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT.
Ngày
tháng 10 năm 2004
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
LỜI CẢM ƠN
...…
Với khoảng thời gian 2 năm theo học cao học tại trường Đại học Sư
phạm Kỹ thuật Tp Hồ Chí Minh, và vốn kiến thức tiếp thu được từ qúi Thầy
Cô, để làm cơ sở và là nền tảng trong việc nghiên cứu và tiếp cận thêm tài
liệu mới ở trong nước và nước ngoài, từ đó giúp người nghiên cứu hoàn thiện
thêm trên rất nhiều lónh vực nhất là về lónh vực chuyên môn.
Đề tài này với hơn 60 trang thuyết minh, bao gồm 5 chương cho nên
mặc dù đã cố gắng tiếp thu kiến thức từ q Thầy Cô, và giáo viên hướng
dẫn cũng như nghiên cứu và cập nhật thêm nhiều tài liệu liên quan, nhưng do
trong quá trình thực hiện một phần vì thời gian ngắn, một phần do trình độ
còn hạn chế, nên luận văn thế nào cũng còn thiếu sót. Rất mong sự góp ý
của Thầy Cô và bạn bè để đề tài này hoàn thiện hơn.
Tôi xin chân thành cám ơn:
Ban Giám hiệu Trường Đại học Sư phạm Kỹ thuật Tp HCM.
Phòng Cao học Trường Đại học Sư phạm Kỹ thuật Tp HCM.
Khoa Cơ khí động lực Trường Đại học Sư phạm Kỹ thuật
Tp- HCM.
Q Thầy Cô tham gia giảng dạy Cao Học
Thầy PGS.TS ĐỖ VĂN DŨNG.
Đặc biệt là Thầy TS LÂM MAI LONG tận tình hướng dẫn để tôi
hoàn thành đề tài đúng thời gian qui đònh.
Đã giảng dạy, hướng dẫn, tạo điều kiện và giúp đỡ tận tình để tôi hoàn
thành tốt luận văn này.
TP.HCM ngày 30 tháng 08 năm 2004
Học viên: Trần Quốc Kánh
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
TÓM TẮT
Nhằm phục vụ công việc giảng dạy ngày một tốt hơn. Với phương châm
không ngừng nâng cao chất lượng giảng dạy, hôm nay đạt kết quả cao hơn hôm qua
và ngày mai phải tốt hơn hôm nay. Chính vì lẽ ấy người nghiên cứu đã thực hiện
đề tài “Nghiên cứu và mô phỏng sự truyền công suất trong hệ thống truyền
lực xe nhiều cầu chủ động”
Do thời gian thực hiện đề tài có hạn nên việc nghiên cứu và thiết kế mô
phỏng của người nghiên cứu chỉ nêu được các phần chính sau:
CHƯƠNG I: ĐẶT VẤN ĐỀ
CHƯƠNG II: SỰ TRUYỀN NĂNG LƯNG TRÊN XE
CHƯƠNG III: LÝ THUYẾT VỀ SỰ TRUYỀN CÔNG SUẤT
XE NHIỀU CẦU CHỦ ĐỘNG
CHƯƠNG IV: PHÂN TÍCH MỘT SỐ TRẠNG THÁI ĐIỂN HÌNH
TRONG QUÁ TRÌNH TRUYỀN CÔNG SUẤT
CHƯƠNG V: MÔ PHỎNG MỘT SỐ TRẠNG THÁI ĐIỂN HÌNH
TRONG QUÁ TRÌNH TRUYỀN CÔNG SUẤT
Để thực hiện được chương V(mô phỏng) người nghiên cứu tham khảo và ứng
dụng các phần mềm tin học sau:
Flash 2004
Pro Engineer 2001
Mechanical Desktop 2004
Solid Works 2004
Ưu điểm của đề tài là có tính mới và vận dụng đề tài này để giảng dạy cho học
sinh dễ hiểu hơn. Vì vấn đề truyền công suất và đặc biệt là hiện tượng lưu thông
công suất trên ô tô, là một vấn đề mà chúng ta không thể nhìn thấy được bằng mắt,
nên giáo viên và học sinh gặp khó khăn trong việc dạy và học. Đây là mục đích
chính của đề tài góp phần khắc phục trong việc dạy và học tốt hơn.
TRệễỉNG ẹH SPKT TP. HCM
LUAN VAấN THAẽC Sể
SUMMARY
It is necessary for good training, with purpose improves training quality more
and more is better due to above reason, researches has researched about thesis
simulation design research of circulation power in transfer force of activity of
multi-axels automobile system .
Because period of time not much so this thesis including some main parts.
Chapter 1: The first
Chapter 2: Transfer energy of auto-mobile
Chapter 3: Theory about transfer power of activity of multi-axel automobile
Chapter 4: Analyzing some statement symbol about process of transfer power.
Chapter 5: Simulating some statement symbol about process of transfer power.
To finishing chapter 5 (simulation) some software is used in this thesis:
+ Flash 2004
+ pro engineer 2001
+ Mechanical desktop 2004
+ Solid works 2004
Because transfer power problem and specially circulation power statement
of auto-mobile can not see by eyes so teachers and student have some difficult in
training and study.
The main purpose of this thesis is over come difficult in training and study.
This thesis will give some advantage for training course and study:
+ Easy to understand
+ Attractive to students
+ Decrease training time
+ Training results are better
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
MỤC LỤC
Trang
LỜI CẢM ƠN.
TÓM TẮT.
SUMMARY.
MỤC LỤC.
Chương I. ĐẶT VẤN ĐỀ.
I. Giới thiệu.
II. Mục đích của luận văn.
III. Giới hạn và phương pháp nghiên cứu.
1
1
2
2
Chương II. SỰ TRUYỀN NĂNG LƯNG TRÊN XE.
I. Đặt vấn đe.
II. Các lực tác dụng lên xe.
III. Hiện tượng trượt, bám và hệ số bám của bánh xe chủ động.
IV. Cân bằng lực và năng lượng.
V. Sự truyền năng lượng trên xe.
3
3
3
6
10
10
Chương III. LÝ THUYẾT VỀ SỰ TRUYỀN CÔNG SUẤT
XE NHIỀU CẦU CHỦ ĐỘNG.
I. Một số khái niệm cơ bản.
II. Phân phối công suất dùng vi sai.
III. . Phân phối công suất không dùng vi sai.
12
Chương IV. PHÂN TÍCH MỘT SỐ TRẠNG THÁI ĐIỂN HÌNH
TRONG QUÁ TRÌNH TRUYỀN CÔNG SUẤT.
I. Xe một cầu chủ động.
II. Xe hai cầu chủ động.
32
Chương IV. MÔ PHỎNG MỘT SỐ TRẠNG THÁI ĐIỂN HÌNH
TRONG QUÁ TRÌNH TRUYỀN CÔNG SUẤT.
I. Xe một cầu chủ động.
II. Xe hai cầu chủ động.
ĐỀ NGHỊ VÀ KẾT LUẬN.
45
12
15
25
32
39
45
54
60
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
CHƯƠNG I
ĐẶT VẤN ĐỀ
I GIỚI THIỆU:
Hiện nay công nghệ thông tin phát triển rất mạnh trên phạm vi toàn thế giới
và trên thò trường công nghệ thông tin, xuất hiện nhiều phần mềm tin học, đồ họa
chuyên nghiệp nhằm hỗ trợ trong các lónh vực quản lý, lưu trữ hồ sơ, trong lónh vực
giáo dục đặc biệt là trong giảng dạy, tạo các giáo trình điện tử hoặc phục vụ
chương trình đào tạo từ xa…
Ở các nước đang phát triển trên thế giới hiện đang có một xu thế chiến lược
để đầu tư cho tương lai. Đó là đầu tư cho công nghệ phát triển, đầu tư cho chiều sâu
thực chất là đầu tư cho công nghệ dạy học. Đó là những qui trình kỹ thuật trong
dạy học nhằm khơi dậy tối đa tiềm năng của người học theo hai hướng đưa công
nghệ, phương tiện kỹ thuật hiện đại vào quá trình giảng dạy và đầu tư công nghệ
điều khiển, tổ chức nhận thức.
Chính vì thế nếu công nghệ thông tin được ứng dụng vào quá trình dạ y và học
sẽ mang lại nhiều lợi ích thực tiễn như: phát huy được tính tích cực, chủ động, sáng
tạo của sinh viên, học sinh, giáo viên sẽ chủ động, rút ngắn thời gian giảng dạy, có
thời gian đầu tư cho quá trình dẫn dắt, tạo tình huống kích thích tư duy sáng tạo của
người dạy và học.
Hơn nữa trong thời gian gần đây cùng với sự phát triển của khoa học kỹ
thuật, những yêu cầu về chất lượng động lực của ôtô ngày càng được nâng cao.
Một trong những khuynh hướng nâng cao tính chất động lực học của ôtô là việc
phân bố và sử dụng hợp lý lực kéo trên các cầu chủ động và trên các bánh xe trái phải của cầu chủ động. Điều này liên quan tới việc nghiên cứu sự phân bố công
suất từ động cơ tới các cầu chủ độn g (ở xe nhiều cầu chủ động) hoặc tới các bánh
xe trái-phải của một cầu. Vấn đề sẽ được hiểu và giải quyết chính xác hơn khi
nghiên cứu phân phối công suất có vi sai và không có vi sai trong hệ thống truyền
lực xe nhiều cầu chủ động.
Do ngành công nghệ ô tô cũng phát triển nhanh và xu hướng hiện nay các nhà
thiết kế xe ô tô có nhiều cầu chủ động để đáp ứng tính năng cơ động cao.
Vì vậy việc dạy cho học sinh về hệ thống truyền lực của ô tô đặc biệt là
truyền công suất và hiện tượng lưu thông công suất, phần này thường gặp khó khăn
trong quá trình giảng dạy cho học sinh ở các trường dạy nghề vì không có dụng cụ
trực quan…
Không ngoài những lý do nêu trên nên người thực hiện đề tài này muốn ứng
dụng phần mềm tin học để đưa vào giảng dạy bài học sự truyền công suất cho học
sinh thuộc chuyên ngành công nghệ ô tô.
Trang 1
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
II. MỤC ĐÍCH CỦA LUẬN VĂN
Thông qua mô phỏng làm rõ được sự truyền công suất trong hệ thống
truyền lực đặc biệt là lưu thông công suất.
Sinh viên, học sinh được nhìn thấy trực tiếp sự truyền công suất ở các
bánh xe chủ động sau khi giáo viên giảng dạy về nguyên lý hoạt
động.
Học sinh hưng phấn hơn khi học không có hình động của bộ truyền
lực.
Hơn nữa là bộ truyền lực cũng không hiển thò được sự truyền công
suất
Tiết kiệm thời gian chuẩn bò trên lớp, dành nhiều thời gian để giảng
dạy cho học sinh.
Tiết kiệm kinh phí đào tạo cho nhà trường (Giảm được kinh phí đầu tư
máy móc, đầu tư nhà xưởng, cơ sở vật chất lâu xuống cấp…)
Với tất cả các lý do nêu trên đều hướng vào mục đích cuối cùng của luận
văn này là nâng cao hiệu quả giảng dạy chuyên ngành Ô Tô đồng thời đóng góp
thêm về ứng dụng tin học vào giảng dạy tại các trường học, cơ sở dạy nghề…
III. GIỚI HẠN VÀ PHƯƠNG PHÁP NGHIÊN CỨU ĐỀ TÀI.
1. Giới hạn:
Do thời gian thực hiện đề tài có hạn, do kiến thức về các phần mềm tin học
còn hạn chế, người nghiên cứu đề tài chỉ thực hiện những phần chính của sự truyền
công suất ở các bánh xe chủ động của vi sai nón đối xứng cụ thể là: xe một cầu
chủ động và hai cầu chủ động.
Do thời gian và kinh phí bò hạn chế cho nên đề tài chỉ nghiên cứu lý thuyết
và dừng lại ở mô phỏng.
Trong thời gian tới nếu có được sự đồng ý cũng như sự hỗ trợ về kinh phí của
phía nhà trường, người nghiên cứu sẽ tiếp tục nghiên cứu, bổ sung nội dung còn
thiếu sót của đề tài này và tiếp tục thực hiện tiếp những phần còn lại của sự truyền
lực ở các loại vi sai trên xe nhiều cầu chủ động để phục vụ giảng dạy chuyên
ngành Ô Tô.
2. Phương pháp nghiên cứu đề tài.
Người nghiên cứu đã thực hiện các phương pháp nghiên cứu:
Phương pháp phân tích lý luận, tham khảo tài liệu.
Phương pháp mô phỏng
Trang 2
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
CHƯƠNG II
SỰ TRUYỀN NĂNG LƯNG TRÊN XE
Đề cập đến vấn đề truyền năng lượng từ động cơ đến bánh xe chủ động,
chỉ ra mối quan hệ về lực và tốc độ trong đặc tính cho trước của động cơ. p dụng
đối với trường hợp chuyển động ổn đònh.
I. ĐẶT VẤN ĐỀ:
Khi truyền năng lượng từ động cơ đến khung xe bằng hệ thống truyền lực và
hệ thống di chuyển sẽ xảy ra hiện tượng như sau:
- Biến đổi tốc độ và moment xoắn.
- Tiêu hao năng lượng.
- Tích lũy năng lượng ở hai dạng: Động năng do khối lượng của các chi
tiết và thế năng biến dạng đàn hồi sự chuyển hoá hai dạng năng
lượng này là nguyên nhân dao động hệ thống.
Những giả thiết khi nghiên cứu:
- Trong trường hợp truyền động nhiều bánh chủ động, thì giả thiết rằng
sự truyền năng lượng tới các bánh xe là như nhau, nghóa là chỉ có một
đường truyền năng lượng từ động cơ đến khung xe.
- Không quan tâm đến quá trình chuyển tiếp xảy ra khi đóng ly hợp và
sang số.
- Các đặc tính của động cơ và hệ thống truyền lực không thay đổi khi
chuyển động ổn đònh.
- Chuyển động đều với hệ thống truyền lực thuần cơ khí.
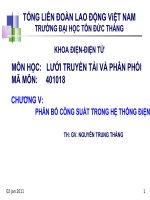
II. CÁC LỰC TÁC DỤNG LÊN XE:
Ta quan niệm
chỉ có một đường
truyền lực từ động cơ
đến bánh xe chủ
động. Vì vậy cho
phép sử dụng model
một vết để tính toán.
Ta xét ô tô
chuyển động lên dốc
như sau:
L
a
V
b
0a
0
Z1
Mk
Mf2
Ow
Fk
Z2
0f2
G
0f1
G cos
Hình 2-1: Sơ đồ các lực tác dụng lên xe
1.Lực chủ động Fk còn gọi là lực kéo tiếp tuyến được xác đònh:
Fk
Mk
(2-1).
r
Với: - Fk là lực kéo của bánh xe chủ động (N).
- r là bán kính tính toán của bánh xe (m).
- Mk là moment kéo của bánh bánh xe chủ động (N.m).
Trang 3
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
2.Lực cản lăn Of:
Lực cản lăn là tích số của phản lực pháp tuyến Z và hệ số cản lăn f.
0 f Z . f (2-2)
Trong đó: - Of lực cản lăn tại các bánh xe (N).
- Z phản lực pháp tuyến tại các bánh xe (N).
- f hệ số cản lăn.
Lực cản lăn và các lực cản khác được qui ước là dương khi tác dụng
ngược chiều chuyển động của xe.
3.Lực cản dốc 0 :
Là thành phần của trọng lượng G theo phương tốc độ xe và được tính:
0 G.sin G.s
(2-3)
Trong đó s được gọi là độ nghiêng hay độ dốc của mặt đường, s tg và thường
được tính ra 0 0 :
s 0 0 tg .100 0 0
Vế sau của công thức (2-3) chỉ nên sử dụng trong trường hợp góc dốc nhỏ,
khi đó sự khác biệt giữa sin và tg là không đáng kể. Với tốc độ khá lớn, thí
dụ s = 20% (ứng với = 120 ) thì độ sai lệch trên có thể tới 2.5%. Độ dốc lớn
nhất của đường ô tô cho phép vào khoảng 10-12%, trên xa lộ thì chỉ 6%, trường
hợp đặc biệt trên vùng núi cao thì độ dốc có thể tới 25%.
Trong một số trường hợp người ta thường tính toán với một lực cản gọi là lực
cản mặt đường, kí hiệu 0 , nó bằng tổng lực cản lăn và lực cản dốc:
0 G.( f .cos sin ) G. (2-4)
Ở đây f .cos sin f s (2-5)
Và được gọi là hệ số cản mặt đường.
Trong các công thức trên, dấu cộng ứng với khi lên dốc, dấu trừ ứng với khi
xuống dốc.
4.Lực cản không khí 0W:
Lực cản không khí tạo bởi các lực khí động học, trong đó chiếm phần lớn là
lực cản do hình dạng của xe (khoảng 80-90%), tiếp theo là thành phần gây ra do
ảnh hưởng của xoáy lốc (10-15%), thành phần do ma sát tạo ra giữa bề mặt xe
và không khí chiếm từ (4-10%).
Lực cản không khí tỉ lệ với áp suất động học pd, diện tích cản gió S và hệ số
cản của không khí Cx theo mối quan hệ sau đây:
0W CX .Pd .s
1
V 2CX .s 0.625CX V 2 .s (2-6)
2
Trang 4
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Trong đó:
là khối lượng riêng của không khí (kg/m3), trong điều kiện nhiệt độ 250C
và áp suất 0.1013 Mpa thì 1.25 .
V là tốc độ tương đối giữa xe và không khí, khi môi trường coi là không có
gió thì V chính là tốc độ của xe (m/s).
Ở những điều kiện áp suất P0 và nhiệt độ t0 khác với điều kiện môi trường
nói trên thì chúng ta có thể sử dụng các quan hệ:
1.25
P0
P0
288
3540
0.1013 (t0 273)
(t0 273)
Do đó:
0W 1770
P0
C X SV 2
(t0 273)
(2-7)
Hợp lực của các thành phần lực cản không khí sẽ đặt tại tâm của lực khí
động học. Các giá trò đònh hướng của hệ số cản không khí và diện tích cản
gió đối với một số loại xe được cho trong bảng dưới đây:
CX
S [ m2]
0.35-0.5
0.30-0.45
0.50-0.65
0.40-0.5
1.6-2.5
1.5-2.0
1.5-2.0
1.7-2.5
0.80-1.0
0.60-0.8
1.00-1.2
0.50-0.7
4.0-7
5.0-8
5.0-8
5.0-7
Loại xe
Xe du lòch
- Loại thường
- Đuôi xe cao (Wedge shape)
- Mui trần
- Loại Wagon
Xe tải
- Loại thùng hở
- Loại thùng kín
- Có rơ-mooc
Xe bus
Bảng 2-1: Hệ số cản và diện tích cản không khí
5.Lực cản quán tính 0a:
Được xác đònh: 0a mtg .a m. a .a (2-8)
Trong đó:
mtg là khối lượng thu gọn của xe.
m là khối lượng tónh của xe.
a là hệ số khối lượng quay.
a là gia tốc của xe (m/s2).
Lực quán tính tác dụng tại trọng tâm của xe, khi tăng tốc a>0 thì 0 a ngược
chiều chuyển động của xe; ngược lại khi giảm tốc 0a cùng chiều chuyển động
và có tác dụng như lực chủ động.
Trang 5
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
III. HIỆN TƯNG TRƯT, BÁM VÀ HỆ SỐ BÁM CỦA BÁNH XE CHỦ ĐỘNG:
1. Hiện tượng trượt tại các bánh xe chủ động:
Biến dạng theo hướng tiếp tuyến (biến dạng vòng) của các thớù lốp do tác
dụng của moment xoắn Mk làm giảm vận tốc tònh tiến của xe, dẫn đến gây ra hiện
tượngï trượt cho ôtô. Điều đó được giải thích rằng, các phần tử của lốp khi đi vào
khu vực tiếp xúc sẽ bò nén lại làm cho bán kính thực tế của bánh xe nhỏ lại, khi đó
quãng đường mà bánh xe đi được sau một vòng quay sẽ giảm đi. Vì vậy moment
xoắn Mk chính là một trong những nguyên nhân gây ra hiện tượng trượt cho ôtô.
Ngoài ra, còn những nguyên nhân khác cũng ảnh hưởng đến sự trượt tại các
bánh xe chủ động như: tải trọng tác dụng, cấu tạo vật liệu lốp, áp suất không khí
trong lốp và điều kiện mặt đường.
Như vậy hiện tượng trượt tại các bánh xe chủ động là do ảnh hưởng của
nhiều yếu tố khác nhau như: tải trọng tác dụng lên ôtô, vật liệu cấu tạo lốp, áp suất
khí trong lốp, moment xoắn động cơ truyền đến các bánh xe chủ động, tình trạng
mặt đường … Và nguyên nhân chủ yếu gây ra hiện tượng trượt tại các bánh xe chủ
động đó là moment xoắn truyền từ động cơ đến các bánh xe chủ động. Như chúng
ta đã biết giá trò moment kéo của ôtô thì không thể có giá trò lớn tùy ý mà bò giới
hạn bởi giới hạn bám giữa bánh xe và mặt đường. Điều này được thể hiện bởi biểu
thức sau:
Fk max
M k max
Z .
r
,
Mkmax = Z. . r (2-9)
Với: - Z [N] tải trọng pháp tuyến tác dụng lên bánh xe.
- : hệ số bám giữa bánh xe và mặt đường.
- r: bánh kính tính toán bánh xe.
Vì thế lực kéo tiếp tuyến tại các bánh xe chủ động đạt đến giá trò Z. thì
ôtô sẽ bò trượt quay hoàn toàn làm giảm sức kéo của xe và mất ổn đònh.
Hiện tượng trượt tại các bánh xe chủ động được đánh giá bằng hệ số trượt,
ký hiệu là và được xác đònh theo công thức sau:
vo v
100% =
v
o
=
v
1
vo
100% =
r
1 l
ro
100%
(2-10)
Trong đó:
: độ trượt được tính theo %.
vo: tốc độ lý thuyết của ôtô.
Tốc độ lý thuyết ôtô là tốc độ khi đó ôtô chuyển động hoàn toàn không có
bất cứ hiện tượng trượt nào.
vo = k.r
Với: k vận tốc góc của ôtô.
r: bánh kính tính toán của ôtô.
Trang 6
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Tốc độ thực tế v là tốc độ ôtô nhận được khi ôtô chuyển động thực tế trên
đường.
v = k.rl
rl: bán kính lăn của ôtô.
v: tốc độ thực tế của ôtô.
Trong quá trình chuyển động của ôtô, hiện tượng trượt xuất hiện sẽ gây
ảnh hưởng đến chỉ tiêu kinh tế của ôtô vì khi ôtô bò trượt sẽ gây mất mát công suất
của ôtô rất nhiều. Vì thế cần thiết phải giảm hiện tượng trượt bằng cách tăng cường
chất lượng bám giữa các bánh xe và mặt đường.
Đối với ôtô chuyển động trên đường tốt, hiện tượng trượt tại các bánh xe
coi như không đáng kể. Nhưng khi ôtô chuyển động trên đường xấu với lực kéo lớn
thì hiện tượng trượt luôn xảy ra và gây mất mát năng lượng ôtô và tính năng
chuyển động ôtô rất nhiều.
2. Lực bám và hệ số bám của bánh xe chủ động:
2.1. Lực bám và hệ số bám giữa bánh xe chủ động và mặt đường.
Để ôtô có thể chuyển động được thì ở vùng tiếp xúc giữa bánh xe và mặt
đường phải có độ bám nhất đònh được đặc trưng bởi hệ số bám. Nếu hệ số bám
thấp thì bánh xe có thể bò trượt quay khi có moment xoắn lớn truyền từ động cơ đến
bánh xe chủ động và khi đó ôtô không thể tiến về phía trước được. Trường hợp này
thường xảy ra khi bánh xe chủ động đứng trên đường lầy lội hoặc trơn (đường đóng
băng).
Hệ số bám giữa các bánh xe chủ động và mặt đường là tỷ số giữ lực kéo
tiếp tuyến cực đại (sinh ra tại điểm tiếp xúc giữa bánh xe chủ động và mặt đường)
và phản lực pháp tuyến tác dụng lên bánh xe chủ động.
Fk max
Z
(2-11)
Có thể xem hệ số bám tương tự như hệ số ma sát giữa hai vật thể trong
cơ học, tuy nhiên ở bánh xe ôtô ngoài ma sát còn có sự bám do mấu bám của bánh
xe tác dụng vào mặt đường.
Để cho bánh xe chủ động không bò trượt quay khi ôtô chuyển động thì lực
kéo tiếp tuyến cực đại Fkmax không vượt quá giới hạn bám của bánh xe với mặt
đường.
Fkmax Z . [ N ] F
(2-12)
Ta thấy rằng, lực bám F tỷ lệ thuận với hệ số bám và phản lực tiếp
tuyến Z giữa bánh xe và mặt đường. Vì lực kéo tiếp tuyến cực đại Fkmax bò giới hạn
bởi lực bám F nên muốn sử dụng hết lực kéo tiếp tuyến Fkmax do động cơ truyền
xuống để thắng các lực cản chuyển động thì cần thiết phải tăng lực bám F nghóa là
phải tăng hệ số bám hay tăng phản lực tiếp tuyến Z
Trang 7
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
2.2 Các yếu tố ảnh hưởng đến hệ số bám và giá trò của hệ số bám.
Hệ số bám giữa bánh xe chủ động và mặt đường phụ thuộc vào nhiều
yếu tố: tình trạng mặt đường (khô, ướt, nhẵn, nhám…), vật liệu chế tạo lốp, kết cấu
và dạng hoa lốp, phụ thuộc vào điều kiện sử dụng khác nhau như tải trọng tác dụng
lên bánh xe, áp suất trong lốp, tốc độ chuyển động của ôtô và độ trượt giữa bánh
xe chủ động và mặt đường.
X
X
1
1
0.7
0.7
2
2
0.6
0.6
0
20
Ha
40 Pi[N/cm2]
0.4
0.2
0
6 Z[KN]
0.6
0.4
2
10
4
Hb
0.8
1
0.6
2
X
X
0.8
0
0.2
20 30
Hc
40
V[m/s]
50
0
20
40
60
Hd
;%
80 100
Hình 2.2 Các yếu tố ảnh hưởng đến hệ số bám
Từ đồ thò ta thấy rằng, khi tăng áp suất trong lốp thì hệ số bám lúc đầu tăng
lên rồi sau đó lại giảm xuống. Giá trò hệ số bám cực đại sẽ tương ứng với áp suất
được khuyên dùng cho lốp đó.
Khi tăng tải trọng có nghóa là khi đó phản lực pháp tuyến Z tác dụng lên
bánh xe tăng lên thì hệ số bám giảm đi một ít và đồ thò có dạng tuyến tính.
Khi tăng tốc độ chuyển động của ôtô thì hệ số bám giảm từ từ theo dạng đường
cong.
Khi đường ướt thì ảnh hưởng của áp suất trong lốp, của tốc độ chuyển động
và phản lực pháp tuyến tác dụng lên bánh xe đến hệ số bám càng lớn. Đặc biệt là
độ trượt giữa bánh xe chủ động và mặt đường ảnh hưởng rất lớn đến hệ số bám
.
Trang 8
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Khi tăng tốc độ trượt của bánh xe thì hệ số bám lúc đầu tăng lên nhanh
chóng và đạt đến giá trò cực đại. Nếu độ trượt tiếp tục tăng thì hệ số bám giảm, khi
độ trượt = 100% khi đó bánh xe chủ động bò trượt quay hoàn toàn thì hệ số bám
giảm 20 30% so với hệ số bám cực đại. Khi đường ướt còn có thể giảm nhiều hơn
nữa 50 60%
Hệ số bám mà chúng ta xét ở trên chính là hệ số bám dọc, tức là trong
mặt phẳng chuyển động của ôtô, ký hiệu là x. Ngoài ra còn có hệ số bám ngang
trong mặt phẳng ngang ký hiệu là y cũng ảnh hưởng đến tính năng ổn đònh của
ôtô. Nó sinh ra chủ yếu là do khi ôtô đang chuyển động có luồng gió thổi ngang
vào ôtô làm ôtô chuyển động lệch hướng. Hiện tượng này càng thấy rõ khi ôtô
chuyển động trên đường với vận tốc cao và do ôtô chuyển động trên mặt đường
nghiêng khi đó tải trọng ôtô dồn về bên phải hoặc bên trái xe và cũng dễ gây ra
hiện tượng trượt. Khi ôtô chuyển động trên đường nghiêng mà có gió thổi ngang
theo chiều nghiêng của mặt đường thì cũng dễ xảy ra hiên tượng trượt ngang.
Do hệ số bám phụ thuộc bởi nhiều yếu tố khác nhau và việc xác đònh các
yếu tố này thường gặp nhiều khó khăn, cho nên thông thường người ta sử dụng giá
trò hệ số bám trung bình phụ thuộc vào loại đường theo bảng sau.
Loại đường và tình trạng đường
Hệ số bám x
* Đường nhựa hoặc đường bêtông
- Khô và sạch
0,7 0,8
- Ướt
0,35 0,5
* Đường đất
- Pha sét, khô
0,5 0,6
- Ướt
0,2 0,4
* Đường cát
- Khô
0,2 0,3
- Ướt
0,4 0,5
Bảng2-2: Hệ số bám phụ thuộc mặt đường
Hệ số bám và lực bám có ý nghóa quan trọng trong việc đảm bảo an toàn
chuyển động của ôtô, nó có liên quan đến tính chất động lực học của ôtô, đến tính
ổn đònh và tính dẫn hướng của ôtô. Ngày nay, khi mà xu hướng về tốc độ chuyển
động của ôtô ngày càng được nâng cao cùng với tính năng an toàn của con người
được đặt lên hàng đầu thì hệ số bám và lực bám của ôtô đóng vai trò rất quan trọng
cho sự phát triển này.
Trang 9
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
IV. CÂN BẰNG LỰC VÀ NĂNG LƯNG:
1. Cân bằng lực:
Theo hình 2-1: Ta có phương trình cân bằng lực theo phương chuyển động
của xe như sau:
Fk 0 f 0a 0W 0 (2-13)
Lực chủ động Fk trên các bánh xe chủ động (sinh ra từ moment xoắn của
động cơ khi làm việc ở đặc tính ngoài) và lực cản gió 0w đều là một hàm số
của tốc độ V; vì vậy chúng ta thường nhóm hai lực này thành một lực:
F =Fk – 0w (2-14)
Và được gọi là lực chủ động của xe, nó cũng là một hàm số của tốc độ
chuyển động V. Phương trình (2-13) khi đó có thể viết:
F 0 f 0a 0 (2-15)
Phương trình (2-15) có nghóa là: Lực chủ động của xe được dùng để khắc
phục lực cản lăn, lực cản quán tính (khi tăng tốc), Lực cản dốc khi lên dốc.
2. Cân bằng năng lượng:
Cân bằng năng lượng được hiểu như là sự cân bằng về công suất của tất cả
các lực tác dụng lên xe. Ta có những công suất như sau:
Công suất trên các bánh xe chủ động: Pk =Fk.V
Công suất cản lăn: Pf = 0f.V
Công suất cản dốc: P 0 .V
(2-16)
Công suất cản không khí: Pw = 0w.V
Công suất cản quán tính: Pa = 0a.V
Công suất của xe: P = F.V = Pk –Pw
Cân bằng công suất có thể viết dưới dạng:
Pk Pf P PW Pa (2-17)
hoặc P Pf P Pa
V. SỰ TRUYỀN NĂNG LƯNG TRÊN XE:
1. Sự biến đổi năng lượng trong hệ thống chuyển động:
Hệ thống chuyển động được coi là là cụm truyền động bánh xemặt đường. Trong trường hợp này chúng được coi là cụm biến đổi bậc không,
tức chúng ta không quan tâm đến khối lượng và biến dạng của nó. Hệ thống
chuyển động biến đổi chuyển động quay thành chuyển động tònh tiến, nghóa là
biến đổi moment MK và vận tốc góc
k
trên trục bánh xe thành lực kéo của
bánh xe (FK) và tốc độ tònh tiến (V).
Trang 10
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Quan hệ của các thông số trên như sau:
M
Fk k , V rl .k
(2-18)
r
Trong đó:
r là bán kính tính toán của bánh xe, có thể coi r = const.
rl là bánh kính lăn của bánh xe, nó thay đổi phụ thuộc vào tải trọng
và tốc độ.
Hai loại bán kính trên được đònh nghóa ở (công thức 3-1).
Như vậy các mối quan hệ (2-18) cho thấy rằng hệ thống chuyển động biến đổi
lực với một tỉ lệ không đổi, còn sự truyền tốc độ không phải là ổn đònh. Trên
đường tốt và tốc độ cao có thể coi rl = r, ngược lại trên đường xấu và tốc độ
thấp, nhất là với máy kéo thì không được coi như vậy (tức là phải quan tâm tới
trượt).
2. Sự truyền năng lượng trong hệ thống truyền lực thuần cơ khí:
V
M e , e
M k , k
h
Động cơ
r
Hộp số
in(1,2…n)
i0 , 0
Fk
Hình 2-3: Sơ đồ hệ thống truyền lực thuần cơ khí
M
Công thức (2-18) Fk k , V rl .k
r
h
M
M i i 0 M eitltl
Fk k e h 0
(2-19)
r
r
r
V rl .k
e
i0ih
rl
e
itl
rl
(2-20)
Trong đó: - M e , e là moment và tốc độ góc của động cơ
-
ih, i0 là tỉ số truyền của hộp số và cầu chủ động
itl = ih.i0 tỉ số truyền của hệ thống truyền lực
h ,0 hiệu suất của hộp số và cầu
-
tl hiệu suất của hệ thống truyền lực.
Trang 11
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
CHƯƠNG III
LÝ THUYẾT VỀ SỰ TRUYỀN CÔNG SUẤT
XE NHIỀU CẦU CHỦ ĐỘNG
I. MỘT SỐ KHÁI NIỆM CƠ BẢN:
1. Bán kính lăn rl[m] của bánh xe: Nói một cách chính xác thì rl không
phải là thông số hình học mà là thông số động học, nó là một thông số tỉ lệ giữa tốc
độ góc k của bánh xe và tốc độ thực tế V của tâm bánh xe. Bán kính lăn được xác
V
rl
đònh:
(m) (3-1)
k
Bán kính lăn cũng có thể xác đònh từ quãng đường X mà bánh xe đi được
và tổng số vòng quay cần thiết Nk của bánh xe để đi hết quãng đường đó:
rl
X
2 N k
(3-2)
Bán kính lăn chòu ảnh hưởng của nhiều thông số như: tải trọng pháp tuyến
Z, áp suất khí trong lốp Pv và moment xoắn trên bánh xe Mk. Sự phụ thuộc rl(Mk)
cho thấy ở hình 3-1 dưới đây:
r1
rl 0
Mk
MKmin
0
MKmax
Hình 3-1: Bán kính lăn phụ thuộc vào moment xoắn
Theo hình vẽ: rlo là bán kính lăn của bánh xe mà trên nó không có bất kỳ lực
kéo hay lực phanh nào (bánh xe bò động). Mkmax và Mkmin là hai giới hạn bám khi
kéo và khi phanh, ứng với hai trạng thái này bánh xe bò trượt quay (khi kéo) hoặc
trượt lết (khi phanh) hoàn toàn. Ở trạng thái trượt quay hoàn toàn ta có V=0 và
K 0 do đó r 0 . Ở trạng thái trượt lết hoàn toàn (khi phanh với cường độ cực
đại, các bánh xe hãm cứng và trượt lết trên đường) thì:
V 0 và
k 0
do đó rl
Để đơn giản thì mối quan hệ giữa rl và Mk thường được tuyến tính hóa trong
toàn bộ vùng từ Mkmax tới Mkmin theo một phương trình đại số sau đây:
rl = rlo - M.Mk = rlo - F.Fk
(3-3)
Trang 12
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Trong đó: - Fk là lực kéo tiếp tuyến tại bánh xe chủ động Fk =Mk/r
- M [1/N], F [m/N] là các hệ số thay đổi bán kính lăn (hay còn gọi là
hệ số biến dạng vòng của lốp), giá trò của nó phụ thuộc vào loại lốp, á p suất
lốp và tải trọng hướng tâm Z. Như cho thấy ở đồ thò hình 3-2
F / m / KN
0.005
0.012
Lốp 18.4/12-24
F
Lốp 12. – 20, PV = 0.3 MPa
0.004
0.008
/m/KN/
PV = 0.3
Lốp
0.003
PV = 0.2 1200-500
0.004
P
V
0.002
Lốp 9-20
0.2
0.16
0.09 MPa 0 PV – 0.495
0.001
36
0.06
20
4
28
10
12
Z
KN
Z/KN/
20
30
Hình3-2:Đồ thò thực nghiệm về sự phụ thuộc của f vào tải trọng Z và áp suất
lớp PV
2. Bán kính tính toán:
Trong tính toán thường sử dụng một bán kính thống nhất gọi là bán kính
tính toán của bánh xe (hay bán kính bánh xe) ký hiệu là r{m}, nó được chọn như là
bán kính lăn của bánh xe bò động rlo, bán kính tính toán được cho trong các
catalouge
3. Lực tác dụng lên bánh xe chủ động và bánh xe phanh:
V
k
Bánh xe
Of
Chủ động
FK
a
F
k
Of
X
Z
F
MK=MB
F
FB
FB
FK
Z
F
Mf
Of
Z
Mk
F
F
FK
Of
a
Mk
F
r
FK
V
Bánh xe
phanh
Mk
Z
F
Mk
F
F
Of
Of
Z
Mk
Mf
X
Z
Hình 3-3: Các lực và momen tác dụng lên bánh xe chủ động và bánh xe phanh
Trang 13
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Trên hình vẽ (3-3) ta có:
- Mk [N.m] là moment xoắn từ động cơ truyền xuống bánh xe chủ động nó
có chiều cùng chiều quay của bánh xe và giá trò được tính:
Mk = Me.itl.tl (3-4)
Với Me là moment xoắn của động cơ, itl là tỉ số truyền của hệ thống truyền
lực, tl là hiệu suất của hệ thống truyền lực.
Mk không thể có giá trò lớn tùy ý mà nó hạn chế bởi giới hạn bám giữa
bánh xe và mặt đường:
Mkmax Z..r (3-5)
Với Z là tải trọng pháp tuyến tác dụng lên bánh xe và là hệ số bám giữa
bánh xe và mặt đường. Vế phải của (3-5) được gọi là moment bám.
- F = Z : là trọng lượng từ khung truyền xuống bánh xe
- F [N] là phản lực đẩy từ khung xe truyền xuống bánh xe, nó ngược
chiều chuyển động vận tốc v của bánh xe chủ động.
- X [N] là phản lực tiếp tuyến của mặt đường tác dụng lên bánh xe, nó
cùng chiều chuyển động khi bánh xe là chủ động.
X = Fk - Of
(3-6)
Với Fk = Mk/r là lực kéo tiếp tuyến trên bánh xe chủ động.
Of = Z.f là lực cản lăn với f là hệ số cản lăn
Mf = Of.r là moment cản lăn, nó luôn ngược chiều quay của bánh xe.
4. Dòng công suất trên bánh xe chủ động và bánh xe phanh :
F
X
H a :Bánh xe chủ động
H b:Bánh xe phanh
Hình 3.4 : Dòng công suất trên bánh xe chủ động và bánh xe phanh
- Công suất trên bánh xe Pk = Mk.k . Bánh xe chủ động nên Mk và k cùng
chiều suy ra Pk dương, ngược lại trong trường hợp phanh thì Pk mang dấu âm.
- Công suất truyền qua ổ trục bánh xe Pv = F. V. Khi F vàV cùng chiều
(trường hợp phanh) Pv được coi là dương và dòng công suất này được truyền tới
bánh xe (sau đó được tiêu hao chủ yếu trong cơ cấu phanh), ngược lại trong trường
hợp lực kéo Pv mang giá trò âm, dòng công suất này truyền lên xe và đẩy xe chạy
tới.
Trang 14
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
- Công suất tổn hao Pm, vì công suất tổn hao nên nó mang giá trò âm.
Cân bằng năng lượng khi bánh xe chuyển động ổn đònh được viết:
Pk + P v + P m = 0
(3-7)
Từ đó khai triển:
Pm = -Pk – Pv = -Mk.k - F.v = -Fk.vo + (Fk + Of)v
= Of.v + Fk(v – vo) = Of.v + Fk.v = Pf + P (3-8)
Trong đó:
- Vo = k.r [m/s] là tốc độ lý thuyết của xe (khi chuyển động hoàn toàn
không có trượt).
- Pf = Of.v là công suất cản lăn, có giá trò âm.
- V = v – vo gọi là tốc độ trượt (với v là tốc độ tònh tiến thực tế của ôtô), có
giá trò dương khi phanh (trượt lết) và giá trò âm khi kéo (trượt quay).
- P = Fk. V gọi là công suất trượt (trượt lăn khi kéo, trượt lết khi phanh)
Công suất trượt luôn luôn nhỏ hơn không.
Rõ ràng rằng công suất cản lăn luôn tồn tại khi bánh xe lăn, trong khi đó
công suất trượt chỉ tồn tại khi có lực Fk (kéo hoặc phanh). Khi ôtô chuyển động với
tốc độ cao trên nền đường cứng thì tốc độ trượt thường khá nhỏ nên công suất trượt
có thể bỏ qua, khi chuyển động trên đường đòa hình thì điều này không cho phép.
5. Phân phối công suất trên ô tô :
Ở chương trước chúng ta đã giả thuyết chỉ có một đường truyền công suất
duy nhất từ động cơ đến bánh xe chủ động. Thực chất ít nhất thì ô tô có hai dòng
công suất từ động cơ dẫn đến hai bánh xe trái, phải của cầu chủ động, ở xe nhiều
cầu chủ động thì dòng công suất tăng lên gấp bội, nghiên cứu phân phối công suất
là qui luật phân phối công suất (moment xoắn và tốc độ góc) từ động cơ đến các
cầu chủ động và đến các bánh xe của cầu chủ động, đồng thời cũng khảo sát các
hiện tượng xảy ra trong quá trình phân phối này.
Việc phân phối công suất thì được thực hiện bằng cơ cấu phân phối công
suất ở cầu chủ động, cơ cấu này là vi sai (hai bậc tự do) ở hộp phân phối giữa hai
cầu thì cơ cấu này có thể là vi sai, hoặc là không dùng vi sai.
II. PHÂN PHỐI CÔNG SUẤT DÙNG VI SAI:
1. Nhiệm vụ của vi sai:
Việc phân phối công suất trên ôtô thường sử dụng cơ cấu vi sai, vi sai trên
ôtô có nhiệm vụ:
- Phân phối tốc độ góc khác nhau cho hai trục để đảm bảo tốc độ tiếp tuyến
khác nhau của các bánh xe (sự khác nhau giữa bánh ngoài và bánh trong khi quay
vòng hoặc giữa các cầu khi chuyển động trên đường gồ ghề hoặc bám kém)
- Phân phối moment xoắn cho các trục theo một tỉ lệ xác đònh.
Trang 15
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
2. Động học của cơ cấu vi sai:
Vi sai là một cơ cấu có ít nhất 2 bậc tự do, vi sai thì có nhiều loại như: vi sai
bánh răng nón, vi sai bánh răng trụ, vi sai trục vít, vi sai hành tinh… Ở đây ta chỉ
nghiên cứu vi sai bánh răng nón đối xứng.
2P
r
2P
r
S
e
P1
e
i
P
P
i
P2
P
P
Hình3-5: Sơ đồ động vi sai nón.
Trên sơ đồ chúng ta kí hiệu 2 trục ra là e và i với qui ước: trục e là trục
quay nhanh hơn, tức là trục bánh xe phía ngoài khi ô tô quay vòng hoặc là trục của
bánh xe (hay cầu) trượt quay nhiều hơn; trục i là trục quay chậm hơn, tức là trục
trong khi quay vòng hoặc là trục của bánh xe (hay cầu) trượt quay ít hơn.
Các quan hệ động học của vi sai được mô tả bằng biểu thức quan hệ dưới
đây:
Khi truyền động từ trục e tới trục i và phần tử r (vỏ vi sai) được giữ cố
Z
Z
ieir P 2 1 ;
đònh (e-i)r :
iier P1 1 (3-9).
Z P1
ZP2
(vi sai đối xứng ZP1 = ZP2)
r
r
Trong đó: - iei , iie là tỉ số truyền từ trục e tới trục i và ngược
lại khi phần tử r đước yên.
- Zp1, ZP2 là số răng của bánh răng p1 và p2 .
Dấu âm chứng tỏ 2 bánh răn P1 và P2 quay ngược chiều nhau.
Các thông số nêu trên tương ứng với hiệu suất truyền
động eir , ier và r .
Khi truyền động từ r tới trục e và i: trong trường hợp chuyển động
thẳng và bán kính các bánh xe là như nhau.
Vi sai nón đối xứng với ir=1 ta có quan hệ:
e i trục , với r/ trục= 1
(3-10).
Như vậy trong điều kiện chuyển động thẳng tốc độ góc của các trục e,
i và vỏ vi sai là bằng nhau.
3. Động học và quan hệ moment của vi sai bánh xe:
Chúng ta khảo sát quan hệ động học giữa 2 bánh xe của 1 cầu chủ động có trang bò
vi sai nón đối xứng khi cầu xe quay vòng với bán kính R.
Gọi tỉ số
R
là bán kính quay vòng riêng, ta có quan hệ như sau:
B
Trang 16
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
Tốc độ tònh tiến của cầu xe.
V R. (3-11)
Với là tốc độ quay của cầu xe xung quanh tâm quay vòng o.
Quan hệ giữa các tốc độ tònh tiến trong (i) và ngoài (e):
Ve ( R B / 2). r.e
Vi ( R B / 2). r.i
Do đó: Ve / Vi e / i ( R B / 2) /( R B / 2)
(2 1) /(2 1)
Từ đó suy ra tốc độ góc của các trục:
(1 1/ 2 ).V
r
( R B / 2) (1 1/ 2 ).V
i
(3-12)
r
r
e ( R B / 2) / r
Tốc độ của vỏ vi sai:
r 0.5(e i ) (vi sai đối xứng)
(3-13).
V 0.5(Ve Vi ) 0.5r (e i ) r.r (3-14)
Từ đó suy ra:
e r (1 1/ 2 ) ,
i r 1 1/ 2 (3-15)
Biểu thức trên có nghóa là khi quay vòng bánh xe ngoài quay nhanh
hơn vỏ còn bánh xe trong quay chậm hơn.
Hình 3-6: Sơ đồ quay vòng của cầu chủ động
Trang 17
TRƯỜNG ĐH SPKT TP. HCM
LUẬN VĂN THẠC SĨ
4. Quan hệ moment:
Khi bỏ qua tổn hao trong vi sai: Ta có các quan hệ sau:
Me
iier 1
Mi
Me
1
1
(3-16)
irei
r
Mr
(1 iei )
2
Mi
1
1
irie
r
Mr
(1 iie )
2
M
M
1
(3-17)
e i
Mr Mr
2
Nhận xét:
Theo (3-17) khi bỏ qua tổn hao trong vi sai, tức là vi sai không ma sát thì
moment xoắn phân bố cho 2 bán trục luôn bằng nhau và bằng một nửa giá trò
moment trên vỏ vi sai. Do đó:
M e M i 0.5M r ; M e M i M r (3-18)
Qui ước về dấu của moment và tốc độ góc các phần tử trong vi sai như sau:
Dấu của Mr
Dấu của Mi
Dấu của Me
Chủ động
+
Phanh
-
-
+
Dấu
r 0
i 0
e 0
Khi tính đến tổn hao: trong trường hợp này chúng ta kể đến tổn
hao do ma sát trong truyền động từ trục e tới trục i (hoặc ngược lại) khi vỏ
vi sai giữ đứng yên, tức là kể đến hiệu suất riêng r của vi sai. Những vi
sai có hiệu suất riêng thấp (nhỏ hơn 1) được gọi là vi sai có ma sát, chúng
thường được sử dụng ở các xe cơ động cao hoặc trong hộp phân phối.
Chúng ta khảo sát dòng công suất trong 2 trường hợp: Chủ động, tức là
dòng công suất truyền từ động cơ tới các bán xe và trường hợp phanh
(bằng động cơ hay hộp số), khi đó công suất được tiêu thụ tại động hay cơ
cấu phanh ở hộp số.
+ Trong trường hợp chủ động: Truyền động từ phần tử r tới (e+i).
- Công suất thế năng của các phần tử e và i cho bởi các quan hệ
sau:
Xuất phát từ:
e r er 0 , M e 0
i r ir 0 , M i 0
Do đó công suất thế năng:
Per M e .er 0 (3-19)
Pi r M i .ir 0 (3-20)
Trang 18