GIÁO TRÌNH kỹ THUẬT tự ĐỘNG điều KHIỂN BẰNG điện tử, NGHỀ sửa CHỮA ô tô TRÌNH độ CAO, dự án GIÁO dục kỹ THUẬT và dạy NGHỀ (VTEP) hà nội 2008
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (855.16 KB, 85 trang )
Bộ LAO ĐộNG - THƯƠNG BINH Và Xã HộI
TổNG CụC DạY NGHề
Chủ biên - biên soạn: Diệp minh hạnh
Giáo trình
kỹ thuật tự động
điều khiển bằng điện tử
NGHề: SửA CHữA ô tô
trình độ: cao
Dự án giáo dục kỹ thuật và dạy nghề (VTEP)
Hà Nội - 2008
Tuyên bố bản quyền :
Tài liệu này thuộc loại sách giáo trình.
Cho nên các nguồn thông tin có thể đợc
phép dùng nguyên bản hoặc trích dùng cho
các mục đích về đào tạo và tham khảo. Mọi
mục đích khác có ý đồ lệch lạc hoặc sử
dụng với mục đích kinh doanh thiếu lành
mạnh sẽ bị nghiêm cấm.
Tổng cục Dạy nghề sẽ làm mọi cách để
bảo vệ bản quyền của mình.
Tổng cục Dạy nghề cám ơn và hoan
nghênh các thông tin giúp cho việc tu sửa
và hoàn thiện tốt hơn tài liệu này.
Địa chỉ liên hệ:
Tổng cục Dạy nghề
37B Nguyễn Bỉnh Khiêm Hà Nội
114-2008/CXB/29-12/LĐXH
2
Mã số:
29 12
22 01
3
Lời nói đầu
Giáo trình môđun Kỹ thuật tự động điều khiển bằng điện tử đợc xây dựng và
biên soạn trên cơ sở chơng trình khung đào tạo nghề Sửa chữa ôtô đã đợc Giám đốc Dự
án Giáo dục kỹ thuật và Dạy nghề quốc gia phê duyệt dựa vào năng lực thực hiện của
ngời kỹ thuật viên trình độ lành nghề.
Trên cơ sở phân tích nghề và phân tích công việc (theo phơng pháp DACUM) của
các cán bộ, kỹ thuật viên có nhiều kinh nghiệm, đang trực tiếp sản xuất cùng với các
chuyên gia đã tổ chức nhiều hoạt động hội thảo, lấy ý kiến.v.v, đồng thời căn cứ vào
tiêu chuẩn kiến thức, kỹ năng của nghề để biên soạn. Ban giáo trình môđun Kỹ thuật
tự động điều khiển bằng điện tử do tập thể cán bộ, giảng viên, kỹ s của Trờng Cao
đẳng Công nghiệp Huế và các kỹ thuật viên giàu kinh nghiệm biên soạn. Ngoài ra có
sự đóng góp tích cực của các giảng viên Trờng Đại học Bách khoa Hà Nội và cán bộ kỹ
thuật thuộc Công ty Cơ khí Phú Xuân, Công ty Ô tô Thống Nhất, Công ty sản xuất vật
liệu xây dựng Long Thọ.
Ban biên soạn xin chân thành cảm ơn Trờng Đại học Bách khoa Hà Nội, Trung
tâm kiểm định ô tô Thừa Thiên Huế, Công ty ô tô Thống Nhất, Trờng Cao đẳng Công
nghệ Đà Nẵng và trờng Trung học Giao thông Vận tải Thừa Thiên Huế, Ban quản lý
dự án GDKT&DN và các chuyên gia của Dự án đã công tác, tạo điều kiện giúp đỡ
trong việc biên soạn giáo trình. Trong quá trình thực hiện, Ban biên soạn đã nhận đ ợc
nhiều ý kiến đóng góp thẳng thắn, khoa học và trách nhiệm của nhiều chuyên gia,
công nhân bậc cao trong lĩnh vực nghề Sửa chữa ô tô. Song do điều kiện về thời gian,
mặt khác đây là lần đầu tiên biên soạn giáo trình dựa trên năng lực thực hiện, nên
không tránh khỏi những thiếu sót nhất định. Rất mong nhận đợc những ý kiến đóng
góp để giáo trình môđun Kỹ thuật tự động điều khiển bằng điện tử đợc hoàn thiện
hơn, đáp ứng đợc yêu cầu của thực tế sản xuất của các doanh nghiệp hiện tại và trong
tơng lai.
Giáo trình môđun Kỹ thuật tự động điều khiển bằng điện tử đợc biên soạn theo
các nguyên tắc: Tính định hớng thị trờng lao động; Tính hệ thống và khoa học; Tính
ổn định và linh hoạt; Hớng tới liên thông, chuẩn đào tạo nghề khu vực và thế giới;
Tính hiện đại và sát thực với sản xuất.
Giáo trình môđun Kỹ thuật tự động điều khiển bằng điện tử cấp trình độ Cao đã
đợc Hội đồng thẩm định Quốc gia nghiệm thu và nhất trí đa vào sử dụng và đợc dùng
làm giáo trình cho học viên trong các khóa đào tạo ngắn hạn hoặc cho công nhân kỹ
thuật, các nhà quản lý và ngời sử dụng nhân lực tham khảo.
Đây là tài liệu thử nghiệm sẽ đợc hoàn chỉnh để trở thành giáo trình chính thức
trong hệ thống dạy nghề.
Ngày 15 tháng 4 năm 2008
Hiệu trởng
Bùi Quang Chuyện
4
5
Giới thiệu về môn học
Vị trí, ý nghĩa, vai trò môn học:
Môn học nhằm cung cấp cho học sinh những kiến thức vê các hệ thống mạch tự
động điều khiển ứng dụng trong ngành sửa chữa ô tô, giúp cho học sinh phân tích
đúng mạch điện và lắp đặt, sửa chữa đợc các hệ thống mạch điện đó.
Mục tiêu của mô đun/môn học:
Nhằm đào tạo cho học viên có đày đủ kiến thức:
Trình bày đúng sơ đồ, chức năng của các khối trong một mạch điện tự động
điều khiển.
Phân tích đúng các chu trình hoạt động cơ bản của một mạch tự đồng điều
khiển.
Trình bày đúng sơ đồ khối và chu trình làm việc của mạch điện (tự động điều
khiển trạng thái cửa, điều khiển thời điểm đánh lửa, điều khiển nhiên liệu
không khí, khai báo nhiên liệu, đo tốc độ và hệ thống chuyển mạch đa chức
năng) trong ô tô.
Kiểm tra và thay thế đợc các khối bị h hỏng trong các mạch điện (tự động
điều khiển trạng thái cửa, điều khiển thời điểm đánh lửa, điều khiển nhiên liệu
không khí, khai báo nhiên liệu, đo tốc độ và hệ thống chuyển mạch đa chức
năng) trong ô tô.
Mục tiêu thực hiện của mô đun/môn học:
Học xong mô đun này học viên thực hiện đợc:
- Trình bày đúng sơ đồ khối và chu trình làm việc của mạch điện (tự động điều
khiển trạng thái cửa, điều khiển thời điểm đánh lửa, điều khiển nhiên liệu không khí,
khai báo nhiên liệu, đo tốc độ và hệ thống chuyển mạch đa chức năng) trong ô tô.
- Kiểm tra và thay thế đợc các khối bị h hỏng trong các mạch điện (tự động
điều khiển trạng thái cửa, điều khiển thời điểm đánh lửa, điều khiển nhiên liệu
không khí, khai báo nhiên liệu, đo tốc độ và hệ thống chuyển mạch đa chức năng)
trong ô tô.
6
Nội dung chính của mô đun/môn học
1. Sơ đồ khối và nguyên lý hoạt động của mạch điện tự động điều khiển.
2. Chức năng và nguyên lý hoạt đông của các khối trong mạch điện tự động
điều khiển.
3. Cấu tạo và nguyên lý làm việc của các phần tử cảm biến.
4. Phân tích chu trình hoạt động của một số mạch điện tự động điều khiển thông
dụng trong ô tô.
5. Kiểm tra và thay thế các khối bị h hỏng trong các mạch điều khiển chức năng
dùng trong ô tô.
6. Bảo quản tốt thiết bị trong quá trình thực hiện công việc.
Danh sách các bài học:
Bài 1: Sơ đồ khối và các chu trình hoạt động của mạch tự động điều khiển.
Bài 2: Cảm biến.
Bài 3: Mạch điều khiển trạng thái cửa xe.
Bài 4: mạch tự động điều khiển thời điểm đánh lửa.
Bài 5: Mạch điện kiểm soát và khai báo mức nhiên liệu.
Bài 6: Mạch điều khiển hổn hợp nhiên liệu - không khí.
Bài 7: Mạch tự động đếm tốc độ.
Bài 8: Mạch tự động điều khiển chuyển mạch đa chức năng.
7
Sơ đồ quan hệ theo trình tự học nghề
HAR 01 01
Điện
kỹ thuật
HAR 01 18
Kỹ thuật về
động cơ đốt trong
H AR 01 08
Kỹ thuật
đIện tử
HAR 01 09
Cơ
kỹ thuật
HAR 01 19
SC-BD phần
cố định động cơ
HAR 01 24
SC-BD Hệ thốnnhiên
liệu xăng
HAR 01 29
SC-BD Hệ thống
truyền lực
HAR 01 10
Vật liệu
cơ khí
HAR 01 11
Dung sai
và lắp ghép
HAR 01 12
Vẽ
kỹ thuật
HAR 02 11
Chẩn đoán
động cơ8
HAR 02 12
Chẩn đoán
HT truyền
động ô tô
HAR 02 14
SC-BD bộ
tăng áp
HAR 01 17
Nhập môn
nghề s/c ô tô
HAR 01 21
SC-BD Cơ cấu
phân phối khí
HAR 01 22
SC-BD Hệ thống
bôi trơn
HAR 01 23
SC-BD Hệ thống
làm mát
HAR 01 25SC-BD
Hệ thống nhiên liệu
diêden
HAR 01 26
SC-BD Hệ thống
khởi động
HAR 01 27
HAR 01 28
SC-BD Hệ thống
đánh lửa
SC-BD Trang thiết
bị điện ô tô
HAR 01 30 SC-BD
Cầu chủ động
HAR 02 07
Kỹ thuật tự động điều
khiển bằng điện tử
HAR 01 14
Thực hành
nghề bổ trợ
HAR 01 20
SC- BD phần
c/động động cơ
HAR 01 31
SC-BD Hệ thống
di chuyển
HAR 01 34
K.tra tình trạng kỹ thuật
đ/cơ và ô tô
HAR 02 06
Xác suất
& thống kê
HAR 01 13
An toàn
HAR 02 08
Vẽ
Auto CAD
HAR 02 15
SC-BD Hệ
thống phun
xăng điện tử
HAR 02 09
Công nghệ khí nén
và thủy lực
HAR 02 16
SC-BD BCA điều
khiển bằng
điện tử
HAR 01 33
SC-BD Hệ
thống phanh
HAR 01 32
SC-BD Hệ
thống lái
HAR 01 36
nâng cao
hiệu quả công việc
HAR 01 35
SC Pan ô tô
HAR 02 10
Nhiệt
kỹ thuật
HAR 02 17
SC-BD HT
đ/khiển bằng
khí nén
Chứng
chỉ
nghề
HAR 02 13
Công nghệ phục hồi
chi tiết trong s/chữa
HAR 02 18
SC-BD Biến
mô men
thủy lực
HAR 02 19
Tổ chức
quản lý và
sản xuất
Bằng
công nhân
lành nghề
Chứng chỉ
bậc cao
Bằng
công nhân
bậc cao
thống
truyền
động ô tô
Các hình thức học tập chính
trong mô đun/môn học
Học trên lớp về:
Sơ đồ khối và nguyên lý hoạt động của mạch điện tự động điều khiển.
Chức năng và nguyên lý hoạt đông của các khối trong mạch điện tự động
điều khiển.
Cấu tạo và nguyên lý làm việc của các phần tử cảm biến.
Phân tích chu trình hoạt động của một số mạch điện tự động điều khiển thông
dụng trong ô tô.
Thực tập tại xởng trờng về:
Kiểm tra và thay thế các khối bị h hỏng trong các mạch điều khiển chức năng
dùng trong ô tô.
Bảo quản tốt thiết bị trong quá trình thực hiện công việc.
Tham quan thực tế
Tự nghiên cứu và làm bài tập
9
Yêu cầu về đánh giá hoàn thành môn học
Kiến thức:
Trình bày đợc đầy đủ các yêu cầu, nhiệm vụ và cấu tạo, nguyên tắc hoạt
động của các bộ phận hệ thống khởi động ô tô.
Giải thích đúng những hiện tợng, nguyên h hỏng và phơng pháp bảo dỡng,
kiểm tra và sữa chữa các bộ phận hệ thống điều khiển bằng điện tử.
Phơng pháp đánh giá:
Qua các bài kiểm tra viết và trắc nghiệm điền khuyết đạt yêu cầu 60%.
Cơ sở đánh giá:
Qua sự đánh giá của giáo viên và tập thể giáo viên.
kỹ năng:
Tháo lắp, kiểm tra và bảo dơng, sửa chữa đợc các h hỏng chi tiết, bộ phận
đúng quy trình, quy phạm và đúng các tiêu chuẩn kỹ thuật trong sửa chữa.
Sử dụng đúng, hợp lý các dụng cụ kiểm tra, bảo dỡng và sửa chữa đảm bảo
chính xác và an toàn.
Chuẩn bị, bố trí và sắp xếp nơi làm việc vệ sinh, an toàn và hợp lý.
Qua các bài kiểm tra viết và trắc nghiệm điền khuyết đạt yêu cầu 60%.
Cơ sở đánh giá:
Qua sự nhận xét, tự đánh giá của học viên, của khách hàng và của tập thể
giáo viên.
Kết quả bài thực hành đạt yêu cầu 70%.
Thái độ:
Chấp hành nghiêm túc các quy định về kỹ thuật, an toàn và tiết kiệm trong
bảo dỡng, sửa chữa.
Có tinh thần trách nhiệm hoàn thành công việc đảm bảo chất lợng và đúng
thời gian.
Cẩn thận, chu đáo trong công việc luôn quan tâm đúng, đủ không để xảy ra
sai sót.
Phơng pháp đánh giá:
Qua sự quan sát trực tiếp trong qúa trình học tập của học viên.
Cơ sở đánh giá:
Qua nhận xét của giáo viên, tự đánh giá của học viên, tập thể giáo viên và
của khách hàng.
10
Bài 1
sơ đồ khối và các chu trình hoạt động
của mạch tự động điều khiển
Mã bài: HAR 02 07 01
Giới thiệu:
Bài học nhằm cung cấp cho học sinh những kiến thức vê các hệ thống mạch tự
động điều khiển ứng dụng trong ngành sửa chữa ô tô, giúp cho học sinh phân tích
đúng mạch điện và lắp đặt, sửa chữa đợc các hệ thống mạch điện đó.
Mục tiêu thực hiện:
- Trình bày đúng sơ đồ khối tổng thể của một mạch tự động điều khiển.
- Trình bày đúng chức năng và nhiệm vụ của các khối trong mạch tự động điều khiển
- Trình bày đúng nguyên lý hoạt động và lĩnh vực sử dụng của các chu trình tự
động điều khiển cơ bản.
Nội dung chính:
I. Sơ đồ khối và nguyên lý hoạt động tổng thể của một mạch điện tự động điều khiển.
II. Chức năng và nhiệm vụ của các khối trong mạch điện tự động điều khiển.
1. Khối giao diện thông tin điều khiển.
2. Khối đệm và phối hợp trở kháng ngõ vào.
3. Khối xử lý thông tin điều khiển.
4. Khối xử lý tín hiệu điều khiển.
5. Cơ cấu chấp hành.
III. Các chu trình hoạt động cơ bản của mạch tự động điều khiển.
1. Chu trình đờng thẳng.
2. Chu trình theo vòng kính.
3. Chu trình rẻ nhánh.
11
Học tại phòng học lý thuyết
I. Sơ đồ khối và nguyên lý hoạt động tổng thể của một mạch
điện tự động điều khiển.
Thông thờng một mạch điều khiển tự động có sơ đồ khối tổng thể nh sau:
Khối giao
tiếp thông
tin điều
khiển
Khối đệm
và phối
hợp trở
kháng
ngõ vào
Khối xử
lý thông
tin điều
khiển
Khối xử lý
tín hiệu
điều
khiển
Thông
tin
điều
khiển
Cơ cấu
chấp
hành
Đối tư
ợng
điều
khiển
II. Chức năng và nhiệm vụ của các khối trong mạch điện tự
động điều khiển.
1. Khối giao diện thông tin điều khiển
- Tiép nhận thông tin điều khiển ở các dạng vật lý nh ánh sáng, độ ẩm, nhiệt độ,
áp suất, âm thanh..vv.
- Cảm biến những thông tin đièu khiển ở các trạng thái vật lý thánh tín hiệu
điện tơng ứng. Tín hiệu này có quy luật biến đổi phản ánh đúng trạng thái của thông
tin điều khiển tác động vào.
2. Khối đệm và phối hợp trở kháng ngõ vào
- Sau khi thông tin điều khiển đợc cảm biến thành tín hiệu điện, tín hiệu này có
biên độ rất nhỏ. Bởi vậy, khối đệm và phối hợp trở kháng ngõ vào có nhiệm vụ phối
hợp trở kháng giữ khối giao diện điều khiển với khối xử lý thông tin điều khiển nhằm
giảm nhỏ mức suy hao trên đờng truyền đối với tín hiệu đợc cảm biến.
12
3. Khối xử lý thông tin điều khiển.
- Thông thờng tín hiêu đa đến cho khối này gồm tín hiệu cảm biến thông tin điều
khiển, tín hiệu đặt chuẩn và tín hiệu phản hồi từ đối tợng điều khiển. Khối xử lý thông
tin điều khiển có nhiệm vụ:
- Lọc loại bỏ nhiễu và sửa dạng tín hiệu để đợc hình dáng theo yêu cầu kỹ thuật.
- So sánh các tín hiệu cảm biến và tín hiệu phản hồi từ đối tợng điều khiển với
mức đặt chuẩn đề tạo tín hiệu điều khiển.
4. Khối xử lý tín hiệu điều khiển.
- Trong các mạch tự động điều khiển khối xử lý tín hiệu điều khiển có tải là các
cơ cấu chấp hành, các tảI này thờng có công suất tơng đối lớn. Do đó tín hiệu điều
khiển có đủ công suất để động tác các cơ cấu chấp hành thì nó phải có biên độ khá
lớn. Bởi vậy, khối xử lý tín hiệu điều khiển có tác dụng khuếch đại tuyến tính tín hiệu
điều khiển.
5. Cơ cấu chấp hành.
III Các chu trình hoạt động cơ bản của mạch tự động điều khiển.
1. Chu trình đờng thẳng.
- Chu trình đờng thẳng hay có thể gọi là (chu trình hở). Loại chu trình này mô tả
đờng đi của thông tin điều khiển trong các mạch điện không cần có khai báo của đại lờng phản hồi từ phía đối tợng điều khiển.
- Quá trình chuyển vận của thông tin điều khiển trong mạch điện theo chu trình
đờng thẳng đợc mô tả trong sơ đồ khối sau:
Khối giao
tiếp thông
tin điều
khiển
Thông
tin
điều
khiển
Khối đệm
và phối
hợp trở
kháng
ngõ vào
Khối xử
lý thông
tin điều
khiển
Khối xử lý
tín hiệu
điều
khiển
Cơ cấu
chấp
hành
Đối tư
ợng
điều
khiển
13
2. Chu trình theo vòng kính.
- Chu trình đờng vòng hay có thể gọi là (chu trình kính). Loại chu trình này mô tả
đờng đi của thông tin điều khiển trong các mạch điện cần có khai báo của đại lờng
phản hồi từ phía đối tợng điều khiển.
- Quá trình chuyển vận của thông tin điều khiển trong mạch điện theo chu trình
đờng vòng đợc mô tả trong sơ đồ khối sau:
Khối giao
tiếp thông
tin điều
khiển
Khối đệm
và phối
hợp trở
kháng
ngõ vào
Khối xử
lý thông
tin điều
khiển
Khối xử lý
tín hiệu
điều
khiển
Cơ cấu
chấp
hành
-M
Thông
tin
điều
khiển
Đối tư
ợng
điều
khiển
Trong sơ đồ trên (-M)là đại lợng khai báo trạng thái đầu ra của đối tợng điều
khiển
3. Chu trình rẻ nhánh.
- Chu trình rẻ nhánh hay có thể gọi là (chu trình điều kiện). Loại chu trình này
mô tả đờng đI của thông tin điều khiển trong các mạch điện cần có điều kiện rẻ
nhánh.
- Quá trình chuyển vận của thông tin điều khiển trong mạch điện theo chu trình
rẻ nhánh đợc mô tả trong sơ đồ khối sau:
Trong sơ đồ khối ta thấy rằng, tại khối xử lý thông tin điều khiển
Nếu thông tin điều khiển trùng với điều kiện đặt ra thì tín hiệu điều khiển sẽ đợc
truyền theo đờng y1 đến đối tợng.
Nếu thông tin điều khiển khác với điều kiện đặt ra thì tín hiệu điều khiển sẽ đợc
truyền theo đờng y2.
14
Khối giao
tiếp thông
tin điều
khiển
Thông
tin
điều
khiển
Khối đệm
và phối
hợp trở
kháng
ngõ vào
Khối xử
lý thông
tin điều
khiển
Y1
Khối xử lý
tín hiệu
điều
khiển
Y2
Cơ cấu
chấp
hành
Đối tư
ợng
điều
khiển
Tự nghiên cứu và làm bài tập
- Trình bày sơ đồ khối tổng thể của một mạch tự động điều khiển.
- Trình bày chức năng và nhiệm vụ của các khối trong mạch tự động điều khiển.
- Trình bày nguyên lý hoạt động và lĩnh vực sử dụng của các chu trình tự động
điều khiển cơ bản.
15
Bài 2
Cảm biến
Mã bài: HAR 02 0702
Giới thiệu:
Cảm biến trông hệ thống điều khiển tự động, tự động hoá sản xuất công nghiệp
cũng nh các hệ thống thông tin đo lờng, bộ cảm biến làm nhiệm vụ cảm biến thông tin,
xác định đối tợng, vị trí đối tợng các thống số của đối tợng và biến đổi thông tin cảm
nhận đợc đó thành tín hiệu điện các bộ cảm biến đó có thể tiếp xúc trực tếp hoặc gián
tiếp với đối tợng cần cảm nhận. Các bộ cảm biến tiếp xúc ngày càng đợc áp dụng
rộng rải để thay thế cho các cảm biến tiếp xúc
Mục tiêu thực hiện:
Học xong bài này học viên sẽ có khả năng:
Trình bày đúng cấu tạo và nguyên lý hoạt động của các phần tử cảm biến th ờng dùng trong mạch điện ô tô.
Kiểm tra đợc chất lợng, cực tính của các phần tử cảm biến bằng VOM
Nội dung chính:
I- Cấu tạo, nguyên lý hoạt động và lĩnh vựic sử dụng của các phần tử cảm biến
thờng dùng trong mạch điện ô tô.
1. Cảm biến quang - điện.
2. Cảm biến nhiệt - điện.
3. Cảm biến cơ - điện.
4. Cảm biến từ trờng - điện.
II- Kiểm tra chất lợng, cực tính và cân chỉnh các phần tử cảm biến
1. Cảm biến quang - điện.
2. Cảm biến nhiệt - điện.
3. Cảm biến cơ - điện.
4. Cảm biến từ trờng - điện.
16
Học tại phòng học lý thuyết
I- Cấu tạo, nguyên lý hoạt động và lĩnh vựic sử dụng của các
phần tử cảm biến thờng dùng trong mạch điện ô tô.
1. Cảm biến quang - điện
Trong kỹ thuật ngời ta có thể dùng nhiều cấu trúc để cảm biến quang điện nh:
Cảm biến vị trí kiểu quang học hay cảm biến lân cận kiểu quang học bao gồm 2
phần.
Nguồn phát sáng E (hay bộ phát);
Bộ nhận sáng R.
Bộ phát sáng sẽ phát ra ánh sáng hớng tới bộ nhận. Phần tử chủ yếu của bộ
phát là một bóng đèn nhỏ hay một LED. ánh sáng phát ra có thể là ánh sáng trong
thấy hay ánh sáng hồng ngoại không trông thấy. ánh sáng thờng đợc tập trung và định
hớng qua một hệ thấu kính hay ở ngay đầu LED rồi hớng tới bộ nhận.
Phần tử chủ yếu của bộ nhận là đi ôt quang, điện trở quang, tranzito quang
hoặc thyritsto quang. Khi các phần tử này bị ánh sáng chiếu vào, điện trở của chúng
thay đổi hoặc chúng làm thông mạch và từ đó tác động vào mạch điều khiển.
Bộ phát E và bộ nhận R trong cảm biến quang học có thể tách rời nhau (hình 3
- 4a) hoặc ghép trong cùng một khối.
E
E
ĐT
R
E
ĐT
R
E
R
ĐT
ĐT
R
a
)
b
)
d
)
c
)
Hình 3- 4. Các cách bố trí bộ phát E và bộ nhận
R
17
Có 4 cách bố trí bộ phát và bộ nhận thờng dùng:
- Kiểu bố trí ánh sáng xuyên (hình 3- 4a): bộ nhận luôn nhận đợc ánh sáng. Khi
đối tợng cần nhận biết lớt qua, ánh sáng sẽ bị chặn và lợng ánh sáng tới bộ nhân bị
thay đổi sẽ làm bộ nhân phản ứng và tác động vào mạch.
- Kiểu bố trí ánh sáng phản xạ ngợc (hình 3- 4b):cách làm việc tơng tự kiểu ánh
sáng xuyên.
- Kiểu bồ trí ánh sáng phản xạ (hình 3 - 4c): bình thờng, bộ nhận không nhận đợc ánh sáng. Khi có đối tợng cần nhận biết, ánh sáng bị phản xạ từ đối tợng và bộ
nhận nhận đợc ánh sáng và mạch bị thay đổi trạng thái.
- kiểu bố trí ánh sáng phản xạ khuếch tán (hình 3 - 4d): bộ nhận sẻ tác động khi
có ánh sáng phản xạ khuếch tán từ đối tợng cần nhận biết hắt lại.
Các cảm biến quang học đợc sử dụng phổ biến trong các trong các công tắc
quang học vì chúng có thể phát hiện đợc cả vật thể phi kim loại mà không cần tiếp xúc
với vật, có tuổi thọ cao, không rung động và tắc động nhanh. Nhợc điểm của cảm biến
loại này là độ chính xác của tắc đông sẻ bị hạn chế khi môi trờng làm việc gây ảnh hởng đến luồng ánh sáng nh bụi khói hoặc khi vật nhận biết là trong suốt với mọi ánh
sáng (trong cách bố trí ở hình (8.5.a, b).
Hoặc khi vật cần nhận biết là màu tối (trong cách bố trí ở hình 3 - 4, c, d) xảy ra
khi gốc tới lớn hơn gốc phản xạ toàn phần (hình 3 - 5).
Gần đây, trong kỹ thuật đã sử dụng nhiều cảm biến quang học có sợi quang. Sợi
quang ứng dụng hiện tợng phản xạ toàn phần khi ánh sánh chiếu từ môi trờng trong
suốt có hệ số chiết quang n1 lớn qua mặt phân cách sang một môi trờng khác có môi
trờng chiết suất n2 nhỏ hơn. Hiện tợng phản xạ toàn phần (hình 3 - 5).
Khúc
xạ
18
Hình 3 - 5
Phản xạ toàn
phần
Sợi quang thông thờng có dạng trụ với lõi bằng vật liệu thạch anh hoạc thuỷ tin
đa thành phần hoặc bằng nhựa tổng hợp trong suốt với chiết suất lớn hơn rất nhiều so
với không khí. Bên ngoài lõi là một màng vỏ lam fbằng chất có chiết suất nhỏ hơn. Nh
trên hình (3 - 6), ánh sáng đi vào sợi quang qua mặt đầu của sợi quang và phẩn xạ
toàn phần liên tục giữa mặt phân cách và màng vỏ rồi ra ngoài mặt đầu kia của sợi.
Những tia sáng không phản xạ toàn phần đợc thì xuyên ra ngoài sợi quang và
gây ra hiện tợng tổn hao năng lợng ánh sáng truyền.
Hình 3 - 6 : Truyền ánh sáng trong sợi quang
Các sợi quang đợc chế tạo để sợi có uốn thì phần lớn ánh sáng vẫn xuyên đợc
dọc sợi
Ưu điểm của loại này là có thể nhận biết đợc những vật có kích thớc nhỏ, chịu
đựng đợc trong các môi trờng rung động mạnh. Do sơi quang có đờng kính nhỏ nên có
thể luồn lách và đặt ở những nơi rất hẹp.
2. Cảm biến nhiệt - điện.
Cảm biến nhiệt độ dựa vào hiện tợng các phần tử tham gia cảm biến có điện trở
thay đổi hay xuất điện động khác nhau khi nhiệt độ của chúng thay đổi.
- Cảm biến nhiệt điện trở.
Cảm biến nhiệt điên trở là cảm biến mà khi nhiệt độ thay đổi thì điện trở của nó
thay đổi theo một quy luật (đã biết).
Cảm biến nhiệt điện trở có thể đợc chế tạo từ kim loại (thờng là pt, Ni, CU)hay từ
chất bán dẫn (MgO, Mn 2 O 3 , MgAl 2 O 4 , NiO)
Hệ số nhiệt độ của cảm biến nhiệt điện tở có thể dơng (khi nhiệt độ tăng thì điện
trở tăng) hoặc âm (khi nhiệt độ tăng thì điện trở giảm ).
Cảm biến nhiệt điện trở bán dẩn có độ nhạy nhiệt cao, gấp hàng chục lần nhiệt
điện trở kim loại.
19
Dải nhiệt độ cảm biến của các loại cảm biến nhiệt độ rỗng (từ -200 C ữ +300
C). Với cảm biến nhiệt điện trở kim loại pt có thể lên tới 1000 C.
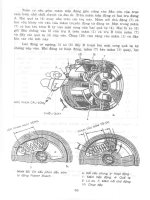
Hình 2- 3 là kết cấu một số loại cảm biến nhiệt điện trở.
- Cảm biến nhiệt ngẫu.
Cặp nhiệt ngẫu hay cặp nhiệt điện là hai thanh (dây) kim loại khác nhau đợc hàn
lại với nhau nh hình 2- 4a.
20
Khi nhiệt độ hai mối hàn giống nhau thì mạch tạo bởi hai thanh kim loại không có
dòng điện. Khi nhiệt độ hai mối hàn khác nhau thì mạch có dòng điện, gọi là dòng
nhiệt điện.
Nguyên nhân là ở mối hàn 2 kim loại có sự khuếch tán điện tử từ kim loại có mật
độ điện tử lớn sang kim loại có mật độ điện tử nhỏ và làm xuất hiện một hiệu điện thế
tiếp xúc. Hiệu điện thế tiếp xúc này phụ thuộc vào bản chất 2 kim loại và vào nhiệt độ
tiếp xúc. Nhiệt độ càng cao, hiệu điện thế tiếp xúc này càng lớn. khi nhiệt độ 2 mối
hàn khác nhau thì các hiệu điện thế tiếp xúc khác nhau và trong toàn mạch kín sẽ có
tổng các hiệu điện thế tiếp xúc khác không và hình thành dòng điện trong mạch kín
(hình 2- 5).
Sức điện động tổng trong toàn mạch có thể đo bằng milivôn kế nh hình 2- 4b.
0
Nếu giữa nhiệt độ t 0 không đổi và t 0 là nhiệt độ môi trờng cần xác định thì:
0
E= At - At 0 = At 0 - B=C(t 0 )
Trong đó: A, B, C là các hằng số.
0
Vậy: khi biết sức điện đông E (bằng milivôn kế) và nhiệt độ t 0 , có thể xác định đợc t 10 . Đây là nguyên lí của cảm biến nhiệt ngẫu thờng đợc ứng dụng để xác định nhiệt
độ đối tợng.
21
Thực tế khi cặp nhiệt điện (nhiệt ngẫu) bán dẫn thờng đợc sử dụng nhiều hơn vì
sức nhiệt điện động lớn hơn của kim loại. Để có sức nhiệt điện động lớn, ngời ta thờng
ghép nối tiếp nhiều cặp nhiệt điện lại thành bộ. Cặp nhiệt điện đợc lồng vào ống sứ
cách điện và bảo vệ bởi vỏ thép không rỉ, chịu nhiệt độ cao. Đầu dây nối ra mạch
ngoài đơc nối vào hộp dây nối (hình 2- 6)
.
0
Nhiệt độ đầu tự do t 0 đợc duy trì ổn định ở 0 0 C (nớc đá đang tan). Thực tế, nhiệt
0
độ t 0 là nhiệt độ môi trờng nên để khử sai số của cảm biến nhiệt độ, ngời ta dùng phơng pháp bù.
Hình 2- 7 là một phơng pháp bù thờng dùng.
Điện áp nhiệt điện cần đo (tỉ lệ với nhiệt độ đo )đơc mắc xung đối với một điện
áp trên R cấp từ nguồn E sao cho điện kế G chỉ 0. Độ chính xác phép đo phụ thuộc độ
chính xác của điện trở R và độ ổn định của nguồn E.
22
3. Cảm biến cơ - điện
Chức năng: tác dụng của cảm biến áp suất và lực.
Cảm biến áp suất và lc đợc sử dụng rất phổ biến trong đo lờng và trong các hệ
thống kiểm soát tự động. Cảm biến áp suất và lực có nhiều kiểu, loại khác nhau.
- Cảm biến áp suất: dới tác dụng của áp suất, một vật có thể bị biến dạng hoặc
chuyển động. Để cảm nhận áp suất, ngời ta thờng dùng các cảm biến nh ống, tấm.
Hình 5-3. Biểu thị một số cảm biến áp suất cơ bản thờng đợc sử dụng.
Hình 5-3a. ống Buốc - đông (bourdon) kim loại hình chử C.
Khi áp suất khí trong ống tăng lên thì đầu tự do chử C duỗi ra. Hình 5-3b là ống
Buốc - đông lò xo.
Khi áp suất khí trong ống lò xo tăng lên thì đầu tự do của lò xo xoay chuyển một góc.
Hình 5- 3b. Cảm biến áp suất loại màng.
Màng sẽ căng phồng ra khi áp suất khí trong buồn tăng lên. Hình 5 - 3d là cảm
biến áp suất dùng màng nhăn (lợn sóng).
23
Cảm biến lực: cảm biến lực dạng cơ - điện là các phần tử mà d ới tác dụng của
lực ngoài sẽ thay đổi tính chất điện của chúng.
Cảm biến điện trở ten- xơ (điện trở lực căng)
Đây là loại cảm biến mà dới tác dụng của lực gây biến dạng thì điện trở của nó
thay đổi. Vật liệu làm cảm biến điện trở ten xơ là một số kim loại, hợp kim (thờng là
constantan, no crôm) hoặc bán dẩn (nh silic đơn tinh thể pha tạp chất).
R = KR
l
l
trong đó: k - hệ số phụ thuộc và biến dạng.
Vật liệu bán dẩn có hệ số k lớn hơn nhiều của kim loại. Dới tác dụng của lực
(ngoài ) điện trở ten xơ bị biến dạng và điện trở của nó thay đổi, từ đó làm thay đổi
mạch mà nó tham gia vào.
- Cảm biến áp điện
Cảm biến áp điện dựa vào hiệu ứng điện có ở một số vật liệu nh thạch anh, muối
sê - nhét Đó là hiện tợng xuất hiện các điện tích trái dấu trên bề mặt đối diên của vật
liệu khi chịu tác động của lực (biến thiên). Điện tích biến mmất khi lực ngừng tác động.
Cảm biến điện phổ biến là phiến thạch anh đợc căt ra từ tinh thể thạch anh (hình
8.17) theo một góc độ nhất định.
24
Hình 5 - 4: tinh thể thạch anh (a)và phần tử cảm biến áp điện đợc cắt ra (b.)
Khi chịu lực nén theo trục x, điện tích xuất hiện nh hình 5- 4b. Khi chịu lực nén
theo truc Y, điện tích xuất hiện xẽ trái dấu. Khi chịu lực kéo, điện tích xuất hiện ngợc
dấu khi nén.
4. Cảm biến từ trờng - điện
Cảm biến vị trí
Cảm ứng vị trí theo kiểu cảm ứng là một mạch từ hở có cuộn dây xoay chiều. K
cuộn dây đợc cấp điện áp, từ trờng của nó đợc khép kính và phần không khí phía trên.
vì mạch t hở nên t trở rất lớn, độ từ cảm nhỏ và điện kháng nhỏ nên dòng điện qua
cuộn dây lớn.
Khi miếng sắt gắn với vật chuyển động lớt qua mạch từ, mạch từ đợc khép kính.
Lúc đó từ trở giảm và từ thông tăng mạnh, điện kháng cuộn dây tăng và dòng
điện qua cuộn dây giảm.
25