Nghiên cứu thiết bị đo tốc độ vòng quay sử dụng cảm biến gia tốc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.42 MB, 76 trang )
LỜI CAM ĐOAN
Tôi xin cam đoan bản luận văn thạc sỹ kỹ thuật: “Nghiên cứu thiết bị đo tốc
độ vòng quay sử dụng cảm biến gia tốc” do tôi tự thiết kế dƣới sự hƣớng dẫn của
GS.TS Phạm Thị Ngọc Yến. Các số liệu và kết quả là hoàn toàn đúng với thực tế.
Để hoàn thành luận văn này tôi chỉ sử dụng các tài liệu đƣợc ghi trong danh
mục tài liệu tham khảo và không sao chép hay sử dụng bất kỳ tài liệu nào khác. Nếu
phát hiện có sự sao chép tôi xin chịu hoàn toàn trách nhiệm.
Hà Nội, ngày 20 tháng 9 năm 2013
Tác giả luận văn
Nguyễn Thị Hằng
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT
1. MEMS: Microelectromechanical Systems
2. LabVIEW: Laboratory Virtual Instrument Electronic Workbench
3. VI: Virtual Instrument
4. DAQ: Data Acquisition
5. NI: National Instruments
6. MAX: Measurement & Automation Explorer
7. DUT: Device under test
-2-
DANH MỤC CÁC BẢNG
Bảng 2- 1. Phân tích tần số của một số nguyên nhân gây rung động ............................ 45
Bảng 4- 1. Kết quả thử nghiệm trên hệ thống tạo dao động sin chuẩn .......................... 66
Bảng 4- 2. Kết quả thực nghiệm trên động cơ xoay chiều ............................................. 68
Bảng 4- 3. Kết quả thử nghiệm trên động cơ xoay chiều điều chỉnh tốc độ bằng biến
tần ................................................................................................................................... 71
-3-
DANH MỤC HÌNH VẼ, ĐỒ THỊ
Hình 1- 1. Sơ đồ cấu tạo máy phát tốc một chiều ......................................................... 12
Hình 1- 2. Sơ đồ cấu tạo của máy phát tốc xoay chiều (đồng bộ) ................................. 13
Hình 1- 3. Cảm biến dùng cuộn dây di động ................................................................. 14
Hình 1- 4. Cảm biến có lõi từ di động............................................................................ 15
Hình 1- 5. Cấu tạo của cảm biến cảm ứng đo tốc độ quay ............................................ 16
Hình 1- 6. Sơ đồ nguyên lý của tốc độ kế quang ........................................................... 17
Hình 1- 7. Sơ đồ nguyên lý máy đo góc tuyệt đối và tín hiệu đầu ra ............................ 18
Hình 1- 8. Sơ đồ nguyên lý đổi hƣớng kế dùng con quay hồi chuyển........................... 19
Hình 1- 9. Sơ đồ nguyên lý đổi hƣớng kế quang dùng laze và cáp quang. ................... 20
Hình 1- 10. Một số dạng tín hiệu rung động .................................................................. 21
Hình 1- 11. Đồ thị biểu diền quan hệ giữa các giá trị Peak - Peak, RMS, Trung bình . 23
Hình 1- 12. Đồ thị chuyển đổi giữa các đại lƣợng gia tốc, vận tốc, dịch chuyển của
một tín hiệu rung hình sin .............................................................................................. 24
Hình 1- 13. Phƣơng pháp đo rung kiểu cũ - cảm nhận bằng giác quan ......................... 24
Hình 1- 14. Phƣơng pháp đo rung kiểu cũ - Tự ghi bằng cơ cấu cơ khí ....................... 25
Hình 1- 15. Phƣơng pháp đo rung kiểu cũ - Đầu dò (Eddy Current Proximity
Probes) ............................................................................................................................ 25
Hình 1- 16. Velocity Pickup........................................................................................... 26
Hình 1- 17. Sơ đồ nguyên lý của máy đo rung .............................................................. 27
Hình 1- 18. Sơ đồ nguyên lý của máy phân tích rung.................................................... 27
Hình 2- 1. Một số dạng cảm biến gia tốc áp điện .......................................................... 30
Hình 2- 2. Sơ đồ nguyên lý của cảm biến gia tốc kế áp trở ........................................... 30
Hình 2- 3. Các bƣớc vi gia công để sản xuất các gia tốc kế nhỏ và siêu nhỏ ................ 34
Hình 2- 4. Lõi của một gia tốc kế MEMS 3 trục ........................................................... 35
Hình 2- 5. Trọng lƣợng của cảm biến và cơ cấu rung ................................................... 36
Hình 2- 6. Đồ thị thời gian – Tần số của tín hiệu rung .................................................. 37
Hình 2- 7. Phổ tần của tín hiệu Chirp ............................................................................ 38
-4-
Hình 2- 8. Sự kiện thoáng qua ở tín hiệu 2 không thấy đƣợc ở phổ tần số.................... 39
Hình 2- 9. Phổ tần tại hộp số của tuabin gió tại tốc độ quay 60 Hz ............................... 39
Hình 2- 10. Phổ tần tại hộp số của tuabin gió tại tốc độ quay 50 Hz............................. 40
Hình 2- 11. Phổ theo bậc sóng hài của tuabin gió tại tốc độ quay 60 Hz (trên) và 50
Hz (dƣới) ........................................................................................................................ 40
Hình 2- 12. Kết quả Phân tích JTFA của hai tín hiệu Chirp. Tín hiệu có tần số giảm
theo thời gian (bên trái) và tín hiệu có tần số tăng theo thời gian (bên phải). ............... 41
Hình 2- 13. Quan hệ giữa phổ tần và Cepstrum ............................................................. 42
Hình 2- 14. Phổ tần của sóng sin và sóng wavelet ......................................................... 43
Hình 2- 15. Trong miền thời gian không phân biệt đƣợc dạng sóng của động cơ tốt
và động cơ bị lỗi, nhƣng sử dụng phƣơng pháp phân tích wavelet các lỗi sẽ trở lên
rõ ràng hơn. .................................................................................................................... 43
Hình 2- 16. Sai số mô hình AR chỉ ra quá trình quá độ trong tín hiệu gốc .................. 44
Hình 2- 17. Phổ tần số của tín hiệu thu đƣợc từ cảm biến gia tốc ................................. 46
Hình 2- 18. Sóng tổng hợp của 3 sóng thành phần ........................................................ 47
Hình 2- 19. Cách gắn cảm biến gia tốc lên vỏ máy ....................................................... 52
Hình 3- 1. Mô hình kiến trúc chuẩn cho thiết bị đo ....................................................... 53
Hình 3- 2. Cảm biến PV-41 của Rion ............................................................................ 54
Hình 3- 3. Sơ đồ mạch chuẩn hóa tín hiệu ..................................................................... 55
Hình 3- 4. Sơ đồ khối NI USB-6008.............................................................................. 56
Hình 3- 5. Sơ đồ chân NI USB-6008 ............................................................................. 57
Hình 3- 6. Sơ đồ kết nối phần cứng thiết bị đo tốc độ vòng quay sử dụng cảm biến
gia tốc ............................................................................................................................. 57
Hình 3- 7.Lƣu đồ thuật toán ........................................................................................... 58
Hình 3- 8. Sơ đồ khối chƣơng trình ............................................................................... 58
Hình 3- 9. Khối thu thập tín hiệu DAQ Assistant với các đầu vào, ra dữ liệu. ............. 58
Hình 3- 10. Khối Filter và các đầu vào, ra tín hiệu. ....................................................... 59
Hình 3- 11. Khối Spectral Measurements với các đầu vào, ra tín hiệu. ........................ 60
-5-
Hình 3- 12. Khối Tone Measurements với các đầu vào, ra tín hiệu. ............................. 60
Hình 3- 13. Khối Write LabVIEW Measurement File................................................... 61
Hình 3- 14. Toán tử nhân với các đầu vào, ra số liệu. ................................................... 61
Hình 3- 15. Giao diện phần mềm Tachometer. .............................................................. 62
Hình 4- 1. Sơ đồ thử nghiệm trên hệ thống tạo rung sin chuẩn ..................................... 64
Hình 4- 2. Sơ đồ gá cảm biến lên bộ tạo rung động chuẩn ............................................ 65
Hình 4- 3. Kết quả thực nghiệm trên hệ thống tạo dao động sin chuẩn tại tần số 20
Hz ................................................................................................................................... 67
Hình 4- 4. Sơ đồ thử nghiệm trên động cơ xoay chiều điều chỉnh tốc độ bằng biến
tần ................................................................................................................................... 68
Hình 4- 5. Kết quả thực nghiệm trên động cơ xoay chiều ............................................. 69
Hình 4- 6. Sơ đồ thử nghiệm trên động cơ xoay chiều điều chỉnh tốc độ bằng biến
tần ................................................................................................................................... 70
-6-
MỤC LỤC
LỜI CAM ĐOAN ........................................................................................................... 1
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT .................................................. 2
DANH MỤC CÁC BẢNG.............................................................................................. 3
LỜI CẢM ƠN ............................................................................................................... 10
MỞ ĐẦU ....................................................................................................................... 11
PHẦN I: LÝ THUYẾT ................................................................................................. 12
CHƢƠNG 1: TỔNG QUAN ĐO TỐC ĐỘ VÀ ĐO LƢỜNG RUNG ĐỘNG ......... 12
1.1
Các phƣơng pháp đo tốc độ động cơ ............................................................ 12
1.1.1
Sử dụng tốc độ kế vòng kiểu điện từ ...................................................... 12
1.1.2
Sử dụng tốc độ kế vòng loại xung .......................................................... 15
1.1.3
Sử dụng máy đo góc tuyệt đối – Resolver.............................................. 17
1.1.4
Sử dụng đổi hƣớng kế ............................................................................ 18
1.1.5
Sử dụng cảm biến gia tốc ....................................................................... 20
1.2
Đo lƣờng rung động ..................................................................................... 20
1.2.1
Rung động là gì ...................................................................................... 20
1.2.2
Mục đích của việc đo lƣờng rung động .................................................. 21
1.2.3
Các đại lƣợng vật lý dùng trong đo lƣờng rung động ............................ 23
1.2.4
Các phƣơng pháp đo lƣờng rung động ................................................... 24
1.2.5
Máy đo và phân tích rung động .............................................................. 27
CHƢƠNG 2: ĐO TỐC ĐỘ VÒNG QUAY CỦA ĐỘNG CƠ BẰNG CẢM BIẾN
GIA TỐC ................................................................................................................... 28
2.1
Tổng quan về các loại cảm biến gia tốc ....................................................... 28
2.1.1
Gia tốc kế quán tính ................................................................................ 28
2.1.2
Gia tốc kế cơ điện ................................................................................... 28
2.1.3
Gia tốc kế áp điện ................................................................................... 29
2.1.4
Gia tốc kế áp trở ..................................................................................... 30
2.1.5
Gia tốc kế hiệu chuẩn ứng suất ............................................................... 31
2.1.6
Gia tốc kế tĩnh điện................................................................................. 32
-7-
2.1.7
2.2
Gia tốc kế nhỏ và siêu nhỏ (MEMS) ...................................................... 33
Các thông số kỹ thuật cơ bản của cảm biến gia tốc ..................................... 35
2.2.1
Độ nhạy .................................................................................................. 35
2.2.2
Trọng lƣợng của cảm biến ...................................................................... 35
2.2.3
Phạm vi đo .............................................................................................. 36
2.2.4
Tần số tự nhiên ....................................................................................... 36
2.3
Một số phƣơng pháp phân tích và xử lý tín hiệu rung ................................. 37
2.3.1
Phân tích trong miền tần số .................................................................... 37
2.3.2
Phân tích theo bậc sóng hài .................................................................... 39
2.3.3
Phân tích trong miền thời gian - tần số .................................................. 41
2.3.4
Phân tích Quefrency ............................................................................... 41
2.3.5
Phân tích Wavelet ................................................................................... 42
2.3.6
Phân tích dựa trên mô hình ..................................................................... 43
2.4
Ứng dụng đo vận tốc vòng quay bằng cảm biến gia tốc .............................. 44
2.4.1
Thuật toán ............................................................................................... 46
2.4.2
Cách gắn cảm biến gia tốc lên vỏ máy ................................................... 48
PHẦN II: THIẾT KẾ THIẾT BỊ ĐO TỐC ĐỘ VÒNG QUAY SỬ DỤNG CẢM
BIẾN GIA TỐC ............................................................................................................ 53
CHƢƠNG 3: MÔ HÌNH & CÁC PHẦN TỬ TRONG MÔ HÌNH THU THẬP
TÍN HIỆU .................................................................................................................. 53
3.1
Phân tích bài toán ......................................................................................... 53
3.2
Các thiết bị sử dụng trong mạch đo ............................................................. 54
3.2.1
Cảm biến gia tốc PV-41 ......................................................................... 54
3.2.2
Mạch chuẩn hóa tín hiệu ........................................................................ 55
3.2.3
Vỉ thu thập dữ liệu USB 6008 ................................................................ 55
3.3
Kết nối phần cứng ........................................................................................ 57
3.4
Chƣơng trình phần mềm............................................................................... 58
3.4.1
Lƣu đồ thuật toán.................................................................................... 58
3.4.2
Sơ đồ khối chƣơng trình ......................................................................... 58
-8-
3.4.3
Giao diện phần mềm Tachometer .......................................................... 62
CHƢƠNG 4. KẾT QUẢ VÀ HƢỚNG PHÁT TRIỂN ............................................. 64
4.1
Kết quả thực nghiệm .................................................................................... 64
4.1.1
Thực nghiệm trên hệ thống tạo dao động sin chuẩn .............................. 64
4.1.2
Thử nghiệm trên động cơ xoay chiều 1 pha ........................................... 67
4.1.3
Thử nghiệm trên động cơ xoay chiều điều chỉnh tốc độ sử dụng biến
tần
................................................................................................................ 69
4.1.4
Đánh giá kết quả thực nghiệm ................................................................ 72
4.2
Hƣớng phát triển đề tài ................................................................................. 72
KẾT LUẬN ................................................................................................................... 73
TÀI LIỆU THAM KHẢO ............................................................................................. 74
-9-
LỜI CẢM ƠN
Đề hoàn thành đƣợc luận văn này, tôi đã nhận đƣợc sự giúp đỡ và hƣớng dẫn
tận tình của các thầy cô giáo, gia đình và bạn bè về mọi mặt. Tự đáy lòng của mình,
tôi xin chân thành gửi lời cảm ơn tới:
GS.TS Phạm Thị Ngọc Yến hiện là Viện trƣởng Viện Nghiên cứu Quốc tế MICA,
Trƣởng Bộ môn Kỹ thuật đo và Tin học công nghiệp – Viện Điện – Đại Học Bách
Khoa Hà Nội. Mặc dù rất bận nhƣng cô đã tận tình giúp đỡ tôi trong suốt quá trình
làm luận văn. Cô đã cố vấn về chuyên môn, giúp tôi hoàn thiện về mặt nội dung và
hình thức của luận văn này, cũng nhƣ đã truyền đạt những kinh nghiệm của mình
giúp cho tôi hoàn thành tốt luận văn và đúng thời hạn.
Xin chân thành cảm ơn tập thể các thầy cô giáo trong Khoa Điện và Bộ môn Kỹ
thuật đo và Tin học công nghiệp. Mặc dù không trực tiếp hƣớng dẫn nhƣng đã trang
bị các kiến thức cần thiết giúp tôi hoàn thành tốt luận văn.
Xin chân thành cảm Phòng Đo lƣờng Thời gian - Tần số, Viện Đo lƣờng Việt Nam
tạo điều kiện thuận lợi về thời gian và trang thiết bị thí nghiệm cần thiết giúp tôi
hoàn thành luận văn này.
Cảm ơn tất cả các bạn học viên lớp Đo lƣờng và các hệ thống điều khiển
2011B đã sát cánh cùng tôi trong suốt thời gian vừa qua.
Trân trọng!
-10-
MỞ ĐẦU
Trong quá trình sản xuất hiện đại, đo tốc độ động cơ đóng vai trò quan trọng
trong các bài toán nâng cao độ chính xác và thích nghi với các yêu cầu ngày càng
cao của công nghiệp. Hiện nay, các thiết bị đo tốc độ vòng quay sử dụng cảm biến
quang, máy phát tốc đƣợc dùng rất nhiều trong công nghiệp và có độ chính xác cao.
Tuy nhiên các thiết bị này chỉ sử dụng đƣợc với các động cơ có phần quay hở còn
khi đo động cơ có phần quay hoàn toàn bị che kín nhƣ máy li tâm, máy vắt, máy
khuấy, v..v… thì chỉ xác định đƣợc tốc độ vòng quay thông qua việc phân tích đặc
trƣng rung động của động cơ thu đƣợc từ cảm biến gia tốc. Đề tài: “Nghiên cứu
thiết bị đo tốc độ vòng quay sử dụng cảm biến gia tốc” nhằm góp phần bổ xung
thêm phƣơng pháp đo tốc độ động cơ. Đề tài cũng đã phát triển hệ thống đo, qua
thực nghiệm thu đƣợc kết quả tốt và tiết kiệm đƣợc chi phí so với thiết bị nhập
ngoại.
Sau hơn ba tháng thực hiện luận văn, với sự hƣớng dẫn tận tình của GS.TS
Phạm Thị Ngọc Yến, luận văn tốt nghiệp đã đƣợc hoàn thành đúng thời hạn. Tuy
vậy, trong quá trình làm luận văn không tránh khỏi những thiếu sót, rất mong đƣợc
sự góp ý của các thầy cô và các bạn.
Hà Nội, ngày 20 tháng 9 năm 2013
Sinh viên thực hiện
Nguyễn Thị Hằng
-11-
Chương 1: Tổng quan đo tốc độ và đo lường rung động
PHẦN I: LÝ THUYẾT
CHƢƠNG 1: TỔNG QUAN ĐO TỐC ĐỘ VÀ ĐO LƢỜNG RUNG ĐỘNG
1.1
Các phƣơng pháp đo tốc độ động cơ
1.1.1 Sử dụng tốc độ kế vòng kiểu điện từ
1.1.1.1Máy phát tốc một chiều
Hình 1- 1. Sơ đồ cấu tạo máy phát tốc một chiều
1 – Stato 2 – Roto 3 – Cổ góp 4 – Chổi quét
Máy phát tốc một chiều là máy phát điện một chiều có sức điện động ra tỷ lệ
với tốc độ quay. Stato là một nam châm vĩnh cửu có hai cực Nam và Bắc. Roto là
một lõi thép gồm nhiều lớp ghép lại có các rãnh quấn dây. Trục Roto đƣợc ghép với
trục đối tƣợng đo.
Khi Roto quay, do cảm ứng điện từ, chúng tạo ra sức điện động cảm ứng:
ecu W
d
dt
(1)
Φ = BS: từ thông xuyên qua cuộn dây
B: độ từ cảm
S: tiết diện cuộn dây
W: số vòng cuộn Roto
Do phƣơng pháp nối dây và nếu tính toán theo vận tốc góc, sức điện động ra có
dạng:
-12-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Era
W 0 KN
2
(2)
ω: vận tốc góc
Φ0: từ thông ban đầu của nam châm
K: hệ số
N: số vòng quay trong một giây
Sức điện động đƣợc lấy ra qua các chổi than tiếp xúc với vành góp. Ứng
dụng đo tốc độ quay của động cơ, máy phát điện có dải đo từ vài trăm – 3000 vòng /
phút.
1.1.1.2Máy phát tốc xoay chiều
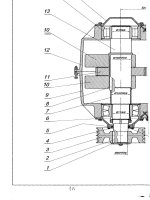
Hình 1- 2. Sơ đồ cấu tạo của máy phát tốc xoay chiều (đồng bộ)
1 – Stato
2 – Roto
Máy phát tốc xoay chiều là máy phát điện xoay chiều trong đó Roto là một
nam châm. Stato gồm các cuộn dây cảm ứng quấn trên lõi thép.
Khi Roto quay, tín hiệu ra là điện áp xoay chiều có tần số tỷ lệ với tốc độ quay:
f
an
60
(3)
a: số đôi cực
n: tốc độ quay
f: tần số
Đo điện áp ra hoặc tần số f có thể xác định đƣợc tốc độ quay. Thông thƣờng
chỉ thị kèm theo thƣờng là tần số kế vì đo tần số có sai số nhỏ và không bị phụ
thuộc vào cấu tạo của máy phát mà chỉ phụ thuộc vào cách bố trí số lƣợng các cực.
Máy phát tốc xoay chiều có thể là 1 pha hoặc 3 pha.
1.1.1.3Tốc độ kế điện từ đo vận tốc dài
-13-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Khi đo vận tốc dài, với độ dịch chuyển lớn của vật khảo sát (>1m) thƣờng
chuyển thành đo vận tốc góc. Trƣờng hợp đo vận tốc của dịch chuyển thẳng nhỏ có
thể dùng cảm biến vận tốc dài gồm hai phần tử cơ bản: 1 nam châm và 1 cuộn dây.
Khi đo, một phần tử đƣợc giữ cố định, phần tử thứ hai liên kết với vật chuyển động.
Chuyển động tƣơng đối giữa cuộn dây và nam châm làm xuất hiện trong cuộn dây
một suất điện động tỷ lệ với vận tốc cần đo.
Hình 1- 3. Cảm biến dùng cuộn dây di động
1 – Nam châm
2 – Cuộn dây
Suất điện động xuất hiện trong cuộn dây có dạng:
e 2rNBv 1Bve
(4)
N: số vòng dây
r: bán kính vòng dây
B: giá trị của cảm ứng từ
v: tốc độ dịch chuyển của vòng dây
l: tổng chiều dài của dây
Tốc độ kế loại này đo đƣợc độ dịch chuyển vài mm với độ nhạy cỡ 1V/m.s.
Khi độ dịch chuyển lớn hơn (tới 0,5m) ngƣời ta dùng tốc độ kế có nam châm di
động.
-14-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Hình 1- 4. Cảm biến có lõi từ di động
a) Cấu tạo
b) Sơ đồ nguyên lý
1 – Nam châm
2 – Cuộn dây
Cảm biến gồm một nam châm di chuyển dọc trục của hai cuộn dây quấn
ngƣợc nhau và mắc nối tiếp. Khi nam châm di chuyển, suất điện động xuất hiện
trong từng cuộn dây tỷ lệ với tốc độ của nam châm nhƣng ngƣợc chiều nhau. Hai
cuộn dây đƣợc mắc nối tiếp và quấn ngƣợc chiều nên nhận đƣợc suất điện động ở
đầu ra khác 0.
1.1.2 Sử dụng tốc độ kế vòng loại xung
Phƣơng pháp đếm xung đo tốc độ quay là phƣơng pháp đo đƣợc sử dụng
nhiều do chúng có những ƣu điểm mà các phƣơng pháp khác không đạt đƣợc (độ
chính xác cao, chống nhiễu tốt, chống suy giảm tín hiệu cao, thực hiện đƣợc dƣới
dạng số, kết cấu đơn giản, chắc chắn, chịu đựng tốt trong môi trƣờng độc hại và độ
tin cậy cao).
Tùy thuộc vào bản chất của vật quay và dấu hiệu mã hóa trên vật quay,
ngƣời ta sử dụng loại cảm biến thích hợp.
1.1.2.1Cảm biến từ trở biến thiên (cảm biến cảm ứng)
-15-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Hình 1- 5. Cấu tạo của cảm biến cảm ứng đo tốc độ quay
Cấu tạo gồm bánh răng làm bằng vật liệu sắt từ, cuộn dây cảm ứng đặt đối
diện với đĩa quay và nam châm vĩnh cửu. Số lƣợng răng của đĩa p = 1; 6; 60; 180;
200; 250 và 600 để có tần số thấp nhất là 10Hz.
Khi bánh răng quay, do tác động của trƣờng điện từ và từ trở mạch từ biến
thiên một cách tuần hoàn làm cho từ thông qua cuộn dây biến thiên, trong cuộn dây
xuất hiện một suất điện động cảm ứng có tần số tỷ lệ với tốc độ quay:
ecu W
d
dt
(5)
Tần số của suất điện động trong cuộn dây xác định bởi biểu thức:
f pn
(6)
p: số lƣợng răng trên bánh răng
n: số vòng quay của bánh răng trong một giây
Biên độ ecu của suất điện động trong cuộn dây phụ thuộc các yếu tố:
-
Khoảng cách giữa cuộn dây và đĩa quay: khoảng cách càng lớn E càng nhỏ.
-
Tốc độ quay: khi tốc độ quay nhỏ, biên độ E rất bé và khó phát hiện, do vậy
tồn tại một vùng tốc độ quay không thể đo đƣợc gọi là vùng chết.
-
Khoảng cách giữa đĩa và cảm biến, do vậy cần chọn khe hở sao cho thích
hợp.
Dải đo của cảm biến phụ thuộc vào số răng p của đĩa. Số răng p càng lớn, tốc
độ có thể đo đƣợc càng nhỏ và ngƣợc lại.
-16-
Chương I: Tổng quan đo tốc độ và đo lường rung động
1.1.2.2Tốc độ kế quang (Encoder)
Hình 1- 6. Sơ đồ nguyên lý của tốc độ kế quang
1 – Nguồn sáng 2 – Thấu kính hội tụ 3 – Đĩa quay 4 – Đầu thu quang
Nguồn sáng phát tia hồng ngoại là một LED. Đĩa quay (có các lỗ bố trí cách
đều trên một vòng tròn ) đặt giữa nguồn sáng và đầu thu. Đầu thu là một photodiode
hoặc phototranzitor. Khi đĩa quay, đầu thu chỉ chuyển mạch khi nguồn sáng, lỗ, đầu
thu thẳng hàng. Kết quả là đầu thu nhận đƣợc một thông lƣợng ánh sáng biến điệu
và phát tín hiệu có tần số tỷ lệ với tốc độ quay nhƣng biên độ không phụ thuộc tốc
độ quay.
Ngƣời ta cũng có thể dùng đĩa quay có các vùng phản xạ ánh sáng bố trí tuần
hoàn trên một vòng tròn để phản xạ ánh sáng tới đầu thu.
Phạm vi tốc độ đo đƣợc phụ thuộc vào hai yếu tố chính:
-
Số lƣợng lỗ trên đĩa.
-
Dải thông của đầu thu quang và của mạch điện tử.
Để đo tốc độ nhỏ (cỡ 0,1 vòng / phút) phải dùng đĩa có số lƣợng lỗ lớn (500
– 1000 lỗ). Trong trƣờng hợp đo tốc độ lớn ( cỡ 105 – 106 vòng / phút) phải sử dụng
đĩa quay chỉ một lỗ, khi đó tần số ngắt của mạch điện xác định tốc độ cực đại có thể
đo đƣợc.
1.1.3 Sử dụng máy đo góc tuyệt đối – Resolver
Máy đo góc tuyệt đối gồm hai phần: phần động gắn liền với trục quay chứa
cuộn sơ cấp đƣợc kích thích bằng sóng mang có tần số 2 -10 kHz qua máy biến áp
quay. Phần tĩnh có hai dây quấn thứ cấp (cuộn sin và cuộn cos) đặt lệch nhau 900.
-17-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Hình 1- 7. Sơ đồ nguyên lý máy đo góc tuyệt đối và tín hiệu đầu ra
Khi trục quay, ở đầu ra của hai dây quấn thứ cấp thu đƣợc hai tín hiệu điều
biên UU0sinωtsinθ và UU0sinωtcosθ. Đƣờng bao của biên độ kênh tín hiệu ra chứa
thông tin về vị trí tuyệt đối (góc θ) của Roto máy đo tức là vị trí tuyệt đối của trục
quay.
Có hai cách xử lý thông tin thu đƣợc:
1) Hiệu chỉnh hai góc thu đƣợc trên cơ sở so sánh góc với một số vi mạch
sẵn có. Các vi mạch này chỉ tín hiệu góc dạng số với độ phân giải 10 – 16 bit/vòng
và một tốc độ quay dạng tƣơng tự. Độ phân giải phụ thuộc vào thông số của mạch
điều chỉnh.
2) Dùng hai bộ chuyển đổi tƣơng tự - số để lấy mẫu trực tiếp từ đỉnh tín hiệu
điều chế. Cần đồng bộ chặt chẽ giữa thời điểm lấy mẫu và khâu tạo tín hiệu kích
thích 2 -10 kHz sau đó dùng bộ lọc để chuyển xung hình chữ nhật thành tín hiệu
kích thích hình sin.
Độ phân giải của phép đo dùng máy đo góc tuyệt đối hoàn toàn phụ thuộc
vào độ phân giải của bộ chuyển đổi tƣơng tự số. Khi biết góc quay tuyệt đối θ, lấy
đạo hàm ta nhận đƣợc tốc độ góc ω cần đo.
1.1.4 Sử dụng đổi hướng kế
1.1.4.1Đổi hướng kế dùng con quay hồi chuyển
-18-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Con quay hồi chuyển gồm một Roto lắp trên một khung động và đƣợc quay
quanh trục Y’Y với tốc độ lớn (cỡ 104 vòng / phút) nhờ một động cơ.
Hình 1- 8. Sơ đồ nguyên lý đổi hƣớng kế dùng con quay hồi chuyển
1 – Con quay hồi chuyển 2 – Khung động 3 – Lò xo 4 – Điện thế kế
Tốc độ quay ω cần đo theo trục Z’Z vuông góc với trục Y’Y làm xuất hiện
một ngẫu lực Cg tỷ lệ với ω theo hƣớng X’X, có xu hƣớng làm cho khung động của
con quay hồi chuyển quay theo. Ngẫu lực Cg đƣợc cân bằng bởi ngẫu lực đàn hồi Cr
của hai lò xo gây nên, có giá trị tỷ lệ với góc quay α của khung.
Ở trạng thái cân bằng:
Cg = Cr
Cr = kα
k: hệ số đàn hồi của lò xo
Cg = ωH
H: momen động học của Roto
Thay các giá trị vào công thức trên ta có công thức xác định góc α:
H
k
(7)
Góc quay α của khung động con quay hồi chuyển tỷ lệ với vận tốc góc ω cần
đo. Để tiện xử lý, góc quay α đƣợc chuyển đổi thành tín hiệu điện nhờ một điện thế
kế.
1.1.4.2Đổi hướng kế quang
Đổi hƣớng kế quang gồm: nguồn phát chùm tia laze, cuộn dây sợi quang có
chiều dài L quấn thành vòng bán kính R, quay với cùng vận tốc góc ω với vật quay.
-19-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Hình 1- 9. Sơ đồ nguyên lý đổi hƣớng kế quang dùng laze và cáp quang.
1 – Nguồn phát laze 2 – Cáp quang 3 – Bản phân tách 4 – Đầu thu
Chùm tia xuất phát từ nguồn phát qua bản phân tách tạo thành chùm tia
truyền theo hai hƣớng ngƣợc nhau trong sợi cáp quang. Khi ra khỏi cáp, do quãng
đƣờng truyền sóng khác nhau, hai tia lệch pha nhau, độ lệch pha giữa hai chùm tia
bằng:
4RL
c
(8)
λ: bƣớc sóng tia laze
c: vận tốc ánh sáng
Trên đầu thu ta thu đƣợc hệ vân giao thoa của hai cùm tia. Bằng cách đếm số
vân giao thoa ΔZ, ta có thể tính đƣợc tốc độ quay theo công thức:
Z
2 RL
c
(9)
1.1.5 Sử dụng cảm biến gia tốc
Đƣợc trình bầy chi tiết trong Chương 2 – Đo tốc độ vòng quay sử dụng cảm
biến gia tốc
1.2
Đo lƣờng rung động
1.2.1 Rung động là gì
Rung động là sự dao động của đại lƣợng đặc trƣng cho sự chuyển động của
hệ thống cơ khí. Rung động có thể là rung động tại một tần số hoặc là tổ hợp của
nhiều tần số (ví dụ nhƣ sự chuyển động của piston trong động cơ đốt trong). Trong
-20-
Chương I: Tổng quan đo tốc độ và đo lường rung động
thực tế thì tín hiệu rung là tổ hợp của rất nhiều tần số, khi phân tích phổ tần tín hiệu
rung động của máy ta thấy một số thành phần tần số nhất định liên quan đến sự
chuyển động của các thành phần khác nhau của máy. Từ đó có thể chuẩn đoán
nguồn gốc của các rung động không mong muốn.
Hình 1- 10. Một số dạng tín hiệu rung động
1.2.2 Mục đích của việc đo lường rung động
Máy móc, thiết bị hoạt động ở các mức độ khác nhau đều gây nên rung động.
Trong trƣờng hợp có hại, các rung động tự phát gây ra sự tháo lỏng các chỗ lắp nối
chi tiết, gây nên những va đập các khe hở do dung sai chế tạo v.v... Sự rung động
làm giảm độ chính xác của các thiết bị, máy móc, làm giảm độ bền của các chi tiết
và hậu quả của chúng là làm giảm tuổi thọ và năng suất của máy móc. Vì vậy cần
đặc biệt chú ý đến các hiện tƣợng rung động, nhất là trong điều kiện của kỹ thuật
hiện đại, các máy móc có số vòng quay và tốc độ lớn, các rung động gây nên những
tác hại không thể bỏ qua đƣợc.
-21-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Phân tích độ rung công nghiệp là một phƣơng pháp đo lƣờng đƣợc dùng để
xác định, tiên đoán, và ngăn ngừa hƣ hỏng đối với máy móc có thiết bị quay. Thực
hiện phân tích độ rung của máy móc sẽ cải thiện đƣợc độ tin cậy của máy móc và
dẫn đến hiệu quả máy móc cao hơn và giảm thiểu hƣ hỏng về điện hay cơ khí.
Chƣơng trình phân tích rung động đƣợc dùng khắp nơi trên thế giới trong lĩnh vực
công nghiệp để phát hiện lỗi trong máy, lên kế hoạch sửa chữa máy móc, và giữ cho
máy móc chạy đúng chức năng, không hƣ hỏng trong thời gian lâu nhất.
Có nhiều hƣ hỏng trong các dạng máy quay có thể đƣợc phát hiện bằng cách
đo và phân tích độ rung phát ra từ máy nhƣ:
• Máy mất cân bằng
• Máy mất liên kết
• Cộng hƣởng
• Trục bị cong
• Rối hộp số
• Rối khuôn lƣỡi cắt
• Rối chong chóng gió
• Vòng tuần hoàn khép kín và sự cố lỗ hỏng
• Hƣ hỏng mô-tơ ( rô-to hay xta-to)
• Hƣ hỏng trục
• Sự giãn cơ
• Tốc độ máy ở mức báo động
…
Về lĩnh vực vệ sinh lao động, khi con ngƣời tiếp xúc với rung động, các rung
động có thể gây nên hiện tƣợng mệt mỏi cho con ngƣời, giảm sức khoẻ và có thể
gây nên những bệnh nghề nghiệp, giảm tuổi thọ của ngƣời lao động.
Vì vậy việc đo, phân tích đặc trƣng rung động của động cơ từ đó xác định
nguyên nhân gây rung động nhằm giảm và khử rung không chỉ là vấn đề kỹ thuật
đơn thuần mà còn có ý nghĩa quan trọng đối với khoa học bảo hộ lao động, nó đƣợc
-22-
Chương I: Tổng quan đo tốc độ và đo lường rung động
xếp trong mƣời hai vấn đề về con ngƣời - môi trƣờng đƣợc các tổ chức y học quốc
tế quan tâm.
1.2.3 Các đại lượng vật lý dùng trong đo lường rung động
Để đánh giá biên độ tín hiệu rung trong miền thời gian, thông thƣờng hay sử
dụng một số thông số sau:
Peak (Là giá trị biên độ đỉnh thƣờng dùng khi chỉ những tác động trong khoảng
thời gian ngắn, tuy nhiên nó chỉ phản ánh biên độ lớn nhất mà không phản ánh
quá trình đã xảy ra)
Peak –peak (Là giá độ lệch đỉnh đỉnh lớn nhất của tín hiệu so với trục tọa độ
thƣờng dùng khi đánh giá mức độ chịu đựng áp lực tối đa của các thành phần
máy)
Trung bình (Ít dùng trong thực tế vì nó không trực tiếp liên quan gì đến các hiện
tƣợng vật lý)
RMS (là giá trị đƣợc sử dụng nhiều nhất vì nó phản ảnh cả quá trình sóng theo
thời gian và liên quan trực tiếp đến năng lƣợng sóng)
Crest factor (độ mấp mô của sóng đỉnh)
Chu kì rung
Hình 1- 11. Đồ thị biểu diền quan hệ giữa các giá trị Peak - Peak, RMS, Trung bình
Các đại lƣợng đặc trƣng cho rung động gồm có gia tốc, vận tốc và dịch
chuyển, ba đại lƣợng này có cùng hình dạng và chu kì chỉ khác nhau về pha. Khi đã
-23-
Chương I: Tổng quan đo tốc độ và đo lường rung động
xác định đƣợc gia tốc thì bằng phép lấy tích phân ta có thể xác định đƣợc vận tốc và
dịch chuyển. Hầu hết các máy đo rung hiện đại đều đo đƣợc cả ba thông số này.
Hình 1- 12. Đồ thị chuyển đổi giữa các đại lƣợng gia tốc, vận tốc, dịch chuyển của
một tín hiệu rung hình sin
1.2.4 Các phương pháp đo lường rung động
Một số phƣơng pháp đo rung động kiểu cũ
Hình 1- 13. Phƣơng pháp đo rung kiểu cũ - cảm nhận bằng giác quan
-24-
Chương I: Tổng quan đo tốc độ và đo lường rung động
Hình 1- 14. Phƣơng pháp đo rung kiểu cũ - Tự ghi bằng cơ cấu cơ khí
Hình 1- 15. Phƣơng pháp đo rung kiểu cũ - Đầu dò (Eddy Current Proximity
Probes)
-25-