thiết kế chế tạo mô hình hệ thống ứng dụng plc điều khiển hệ thống đột lỗ tự động
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (810.63 KB, 25 trang )
ĐỒ
ĐỒ ÁN
ÁN TỐT
TỐT NGHIỆP
NGHIỆP
THIẾT KẾ CHẾ TẠO MÔ HÌNH HỆ THỐNG ỨNG DỤNG PLC
ĐỀ
ĐỀTÀI
TÀI
ĐIỀU KHIỂN HỆ THỐNG ĐỘT LỖ TỰ ĐỘNG
GIẢNG VIÊN HƯỚNG DẪN
: TH.S NGÔ TẤN THỐNG
I
TỔNG QUAN VỀ ĐỀ TÀI HỆ ỨNG DỤNG PLC
ĐIỀU KHIỂN HỆ THỐNG ĐỘT LỖ TỰ ĐỘNG
II
TÍNH TÓAN CÁC HỆ THỐNG TRUYỀN ĐỘNG CƠ ĐIỆN CHO
HỆ THỐNG
III
IV
V
THIẾT KẾ MẠCH ĐIỀU KHIỂN
CHƯƠNG TRÌNH ĐIỀU KHIỂN
KẾT LUẬN
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
1
Sơ lược về lịch sử của nghành sản xuất tự động
Trong những năm gần đây, các nước có nền công nghiệp phát
triển tiến hành rộng rãi tự động hoá trong sản xuất loạt nhỏ. Điều
này phản ánh xu thế chung của nền kinh tế thế giới chuyển từ
sản xuất loạt lớn và hàng khối sang sản xuất loạt nhỏ và hàng
khối thay đổi. Nhờ các thành tựu to lớn của công nghệ thông tin
và các ngành khoa học khác, ngành công nghiệp gia công cơ của
thế giới trong những năm cuối của thế kỷ 20 đã có sự thay đổi
sâu sắc. Sự xuất hiện hàng loạt các công nghệ mũi nhọn như kỹ
thuật linh hoạt (Agile engineering), hệ thống điều hành sản xuất
qua màn hình (Visual Manufacturing), kỹ thuật tạo mẫu nhanh
(Rapid Prototyping) và công nghệ Nanô đã cho phép thực hiện tự
động hoá toàn phần không chỉ trong sản xuất hàng khối mà cả
trong sản xuất loạt nhỏ và đơn chiếc.
Chiếc máy tự động đầu tiên được sử dụng trong công
nghiệp do một thợ cơ khí người nga, ông Pônzunôp chế tạo
vào năm 1765
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
1
Sơ lược về lịch sử của nghành sản xuất tự động
Chính sự thay đổi nhanh của sản xuất đã liên kết chặt chẽ
công nghệ thông tin với công nghệ chế tạo máy.
Làm xuất hiện hàng loạt các thiết bị và hệ thống tự động hoá
hoàn toàn mới như các loại máy điều khiển số, các trung tâm
gia công, các hệ thống điều khiển bằng lôgic PLC, các hệ
thống sản xuất linh hoạt FMS…
Ngày nay, tự động hóa là yêu cầu không thể thiếu đối với bất
kỳ hệ thống sản xuất nào.
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
1
Sơ lược về lịch sử của nghành sản xuất tự động
Ngày nay, tự động hóa là yêu cầu không thể thiếu đối với bất kỳ
hệ thống sản xuất nào.
Tự động hóa cho phép giảm tối đa sức lao động của con người,
nâng cao tốc độ sản xuất cũng như chất lượng sản phẩm, qua
đó giảm giá thành sản phẩm. Ngoài ra, trong một số lĩnh vực đặc
biệt, máy móc tự động là lựa chọn hàng đầu, ngay cả bản thân
con người cũng không thể thay thế được.
Ngành sản xuất tự động hiện đại đã và đang thể hiện vai trò của
mình trong tất cả các lĩnh vực sản xuất, từ các lĩnh vực yêu cầu
sản xuất hàng loạt như sản xuất hàng tiêu dùng, thực phẩm, máy
móc, thiết bị, linh kiện điện tử, … đến các lĩnh vực yêu cầu cao
về công nghệ, kỹ thuật như hàng không, hàng không vũ trụ,
quân sự, …
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
1
Sơ lược về lịch sử của nghành sản xuất tự động
Ở các nước có trình độ phát triển cao, tự động hóa trong
sản xuất gần như đã đi vào sự hoàn hảo. Việc can thiệp
của con người vào hệ thống sản xuất tự động là rất ít.
Đặc biệt có những dây chuyền sản xuất chỉ cần một
người để khởi động và dừng hệ thống.
Con người được giải phóng khỏi việc lao động tay chân,
tuy nhiên, quá trình tự động hóa các hệ thống sản xuất
lại làm tăng tỷ lệ thất nghiệp. Để điều hòa vấn đề này
cần một khoảng thời gian nhất định với những chính
sách hợp lý.
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
2
Mục đích hệ thống:
Sản xuất nhanh, tăng năng suất lao động.
Nâng cao chất lượng, hạ giá thành sản
phẩm.
Giảm bớt áp lực công việc cho công nhân.
Áp dụng kiến thức đã học vào thực tế.
TỔNG QUAN VỀ ĐỀ TÀI HỆ THỐNG PHÂN LOẠI
SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
I
3
Phương án giải quyết
Sử dụng các thiết bị vận tải, cơ cấu chấp
hành để vận chuyển sản phẩm.
Sử dụng piston để đột lỗ trên phôi.
Sử dụng bộ điều khiển để điều khiển hoạt
động của hệ thống.
II
1
XÂY DỰNG PHƯƠNG ÁN THIẾT KẾ MÔ HÌNH HỆ THỐNG
PHÂN LOẠI SẢN PHẨM CÓ CẤNH TAY ROBOT TỰ ĐỘNG
Sơ đồ động mô hình
II
XÂY DỰNG PHƯƠNG ÁN THIẾT KẾ MÔ HÌNH HỆ THỐNG
PHÂN LOẠI SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
2
Sơ đồ mạch đấu nối PLC
II
XÂY DỰNG PHƯƠNG ÁN THIẾT KẾ MÔ HÌNH HỆ THỐNG
PHÂN LOẠI SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
3
Nguyên lý hoạt động
Khi khi khởi động hệ thống, công tắc hành trình 1 thường đóng
làm cho piston cấp phôi hoạt động, đẩy phôi vào băng chuyền đồng thời
băng chuyền hoạt động đưa phôi vào hệ thống.
Khi phôi đi vào chạm công tắc hành trình thứ 2 làm cho piston
đẩy phôi hoạt động, đẩy phôi vào bệ đột chạm công tắc hành trình 3 rồi
tự động rút về, ngay sau đó hệ thống kẹp phôi di chuyển xuống và giữ
phôi.
Sau thời gian định trước thi piston đột tiến hành đột lỗ trên phôi.
Sau đó hệ thống kẹp từ từ di chuyển lên trên, đồng thời piston đột cũng
di chuyển lên.
II
XÂY DỰNG PHƯƠNG ÁN THIẾT KẾ MÔ HÌNH HỆ THỐNG
PHÂN LOẠI SẢN PHẨM CÓ CÁNH TAY ROBOT TỰ ĐỘNG
Cuối cùng piston 5 đẩy chi tiết đã được đột
vào thùng chứa. Khi đảy tới thùng chứa
cham công tắc hành trình 4 tự động rút về
đồng thời hệ thống được khởi động lại.
Quá trình cứ tiếp tục như thế cho đến khi ta
ấn nút stop thi hệ thống sẽ dừng hoạt động.
III
LỰA CHỌN THIẾT BỊ CHO HỆ THỐNG
Sử dụng băng tải để vận chuyển sản phẩm.
sử dụng piston làm hệ thống cấp phôi, đẩy phôi, kep phôi
và đột lỗ.
Sử dụng công tắc hành trình làm thiết bị đo kiểm.
Sử dụng rơ le để cấp nguồn cho tải.
Chọn hệ thống điều khiển là PLC.
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
Sử dụng PLC S7-200 CPU 224 vì nó có các ưu
điểm sau:
* Kết cấu nhỏ gọn, dễ lắp đặt vì các
môđun được tiêu chuẩn hóa.
* Dễ dàng kết nối với các thiết bị.
* Được sủ dụng nhiều trong công nghiệp,
phù hợp với nhu cầu tìm hiểu thực tế.
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
PLC thực hiện chương trình theo trình tự lặp. Mỗi vòng
lặp được gọi là vòng quét (Scan). Mỗi vòng quét được bắt
đầu bằng giai đoạn đọc dữ liệu từ các cổng vào vùng bộ
đệm ảo, tiếp theo là giai đoạn thực hiện chương trình.
Trong từng vòng quét chương trình được thực hiện bằng
lệnh đầu tiên và kết thúc bằng lệnh kết thúc (MEND) sau
giai đoạn thực hiện chương trình là giai đoạn truyền
thông nội bộ và kiểm tra lỗi. Vòng quét được kết thúc
bằng giai đoạn chuyển các nội dung của bộ đệm ảo tới
các cổng RA.
Bộ nhớ của S7 - 200 chia thành 4 phần với 1 tụ có nhiệm
vụ duy trì dữ liệu trong 1 khoảng thời gian nhất định khi
mất nguồn nuôi. Bộ nhớ S7 - 200 có tính năng động cao,
đọc và ghi trong toàn vùng nhớ.
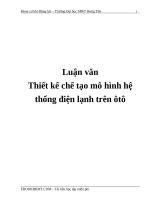
BỘ ĐIỀU KHIỂN LẬP TRÌNH
IV
Vòng quét (scan) trong S7-200
4
1
Chuyển dữ liệu
từ bộ đệm ảo ra
ngoại vi
Nhập dữ liệu từ
ngoại vi vào bộ
đệm ảo
Description of
the contents
3
2
Truyền thông và
tự kiểm tra lỗi
Thực hiện
chương trình
BỘ ĐIỀU KHIỂN LẬP TRÌNH
IV
EEPROM
Chương trình
Tụ
Tham số
Dữ liệu
Chương trình
Miền nhớ ngoài
Chương trình
Tham số
Tham số
Dữ liệu
Dữ liệu
Vùng đối tượng
Bộ nhớ trong và ngoài của S7-200.
Vùng chương trình: là miền nhớ được sử dụng để lưu
trữ các lệnh chương trình (có thể đọc/ghi được).
Vùng tham số: là miền lưu giữ các tham số như từ
khoá, địa chỉ trạm (cũng có thể đọc ghi/được).
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
Vùng dữ liệu: được dùng để cất các dữ liệu của
chương trình bao gồm các kết quả phép tính, bộ đệm
truyền thông...
Vùng đối tượng: timer, bộ đếm, bộ đếm tốc độ cao và
các cổng vào/ra. Vùng này không thuộc kiểu đọc/ghi
được.
Hai vùng nhớ cuối có ý nghĩa quan trọng trong việc
thực hiện chương trình, do vậy sẽ được trình bày chi
tiết tiếp theo sau đây.
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
Như vậy, tại thời điểm thực hiện lệnh vào/ra, thông
thường lệnh không làm việc trực tiếp với cổng vào/ra
mà chỉ thông qua bộ đệm ảo của cổng trong vùng
nhớ tham số. Việc truyền thông giữa bộ đệm ảo với
ngoại vi trong các giai đoạn 1 và 4 do CPU quản lý.
Khi gặp lệnh vào/ra ngay lập tức thì hệ thống sẽ
dừng mọi công việc khác ngay cả chương trình xử lý
ngắt, để thực hiện lệnh này 1 cách trực tiếp với cổng
vào/ra.
Nếu sử dụng các chế độ ngắt, chương trình con tương
ứng với từng tín hiệu ngắt được soạn thảo và cài đặt
như 1 bộ phận cuả chương trình, chương trình xử lý
ngắt chỉ được thực hiện trong vòng quét khi xuất
hiện tín hiệu báo ngắt và có thể xảy ra ở bất cứ điểm
nào trong vòng quét.
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
Hiện nay nhu cầu về một bộ điều khiển linh hoạt và
có giá thành thấp đã thúc đẩy sự phát triển những
hệ thống điều khiển lập trình (programmable logic
control). Hệ thống sử dụng CPU và bộ nhớ để điều
khiển máy móc hay quá trình hoạt động. Trong hoàn
cảnh đó bộ điều khiển lập trình (PLC) đã được thiết
kế nhằm thay thế phương pháp điều khiển truyền
thống dùng rơle và thiết bị cồng kềnh, nó tạo ra một
khả năng điều khiển thiết bị dễ dàng và linh hoạt
dựa trên việc lập trình các lệnh logic cơ bản, ngoài
ra PLC còn có thể thực hiện được những tác vụ khác,
như làm tăng khả năng cho những hoạt động phức
tạp.Bộ nhớ chương trình.
Đơn vị điều khiển.Khối ngõ vào.Mạch giao tiếp cảm
biến
lập trình.Bộ nhớ dữ liệu.Khối ngõ ra.Mạch công suất
& cơ cấu tác động.
IV
BỘ ĐIỀU KHIỂN LẬP TRÌNH
Về phần cứng, PLC tương tự như máy tính truyền
thống và chúng có các đặc điểm thích hợp cho mục
đích điều khiển trong công nghiệp.
Khả năng chống nhiễu tốt.
Cấu trúc dạng module do đó dễ dàng thay thế, tăng
khả năng (nối thêm module mở rộng vào/ra) và thêm
chức năng (nối thêm module chuyên dùng).
Việc kết nối dây và mức điện áp tín hiệu ở ngõ vào và
ngõ ra được chuẩn hoá.
Thay đổi chương trình điều khiển dễ dàng.
3
KẾT LUẬN
Mô hình “Ứng dụng PLC điều khiển hệ thống đột lỗ tự
động” với thiết kế có độ ổn định cao, dễ lắp đặt, vận hành. Góp
phần vào việc nâng cao khả năng tự động hóa trong sản xuất,
giảm nhẹ áp lực lao động cho công nhân, giảm bớt một số khâu
trong quá trình sản xuất, tăng năng suất lao động.
Trên cơ sở lý thuyết đã tìm hiểu được, chúng em tiến
hành thiết kế, chế tạo và đạt được sản phẩm cụ thể, đó là xây
dựng thành công mô hình “Ứng dụng PLC điều khiển hệ thống
đột lỗ tự động” hệ thống hoạt động chính xác và đáng tin cậy.
Sau khi hoàn thành đề tài này, chúng em đã nắm bắt
được những kiến thức cơ bản về các lĩnh vực điều khiển lập
trình, cảm biến - đo lường, các thiết bị vận tải, cơ cấu truyền
động, cơ cấu chấp hành. Nắm vững các công cụ hỗ trợ vẽ và
thiết kế.
LỜI CÁM ƠN
Sau 3 năm học tập tại trường Cao Đẳng Công Nghệ Đà
Nẵng, chúng em đã đi được một chặng đường vô
cùng quan trọng để rèn luyện và ngày càng hoàn
thiện bản thân góp phần xây dựng quê hương đất
nước, tiến gần hơn đến ước mơ tương lai của mình.
Cái mốc quan trọng để đánh dấu chặng đường mới đó
chính là đồ án tốt nghiệp.
Kiểm nghiệm qua thực tế những chúng em đã được
học trên ghế nhà trường để có cơ hội trải nghiệm, để
có được cái nhìn đúng đắn hơn là một yêu cầu tất yếu
đối với tri thức của mỗi người. Sau học kì làm đồ án,
chúng em đã có cơ hội vận dụng những kiến thức
mình đã học trong trường vào mô hình thực tế. Được
thầy Nguyễn Thế Tranh và các bạn bè giúp đỡ chúng
em hoàn thiện được đồ án.
LỜI CÁM ƠN
Chúng em xin bày tỏ lòng biết ơn sâu sắc tới Ban
Giám hiệu trường Cao Đẳng Công Nghệ Đà Nẵng,
các thầy cô Khoa cơ khí. Đặc biệt là thầy giáo
Nguyễn Thế tranh, giáo viên hướng dẫn trực tiếp
đã nhiệt tình chỉ bảo, giúp đỡ chúng em trong
suốt thời gian hoàn thành đồ án tốt nghiệp này.
Chúng em xin chân thành cảm ơn!
Đà nẵng, ngày 14 tháng 06 năm 2013
Nhóm sinh viên thực hiện
Nguyễn Minh Hoàng
Nguyễn Quang
CẢM ƠN HỘI ĐỒNG BẢO
VỆ VÀ CÁC BẠN ĐÃ CHÚ
Ý LẮNG NGHE !