motor cortex in voluntary movements a distributed system for distributed functions
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (10.82 MB, 420 trang )
MOTOR CORTEX
IN VOLUNTARY
MOVEMENTS
A DISTRIBUTED SYSTEM
FOR DISTRIBUTED FUNCTIONS
EDITED BY
Alexa Riehle and Eilon Vaadia
CRC PR E S S
Boca Raton London New York Washington, D.C.
Library of Congress Cataloging-in-Publication Data
Motor cortex in voluntary movements : a distributed system for distributed functions /
edited by Alexa Riehle and Eilon Vaadia.
p. cm.
Includes bibliographical references and index.
ISBN 0-8493-1287-6 (alk. paper)
1. Motor cortex. 2. Human locomotion. I. Riehle, Alexa. II. Vaadia, Eilon. III. Series.
QP383.15.M68 2005
612.8′252—dc22
2004057046
This book contains information obtained from authentic and highly regarded sources. Reprinted material
is quoted with permission, and sources are indicated. A wide variety of references are listed. Reasonable
efforts have been made to publish reliable data and information, but the author and the publisher cannot
assume responsibility for the validity of all materials or for the consequences of their use.
Neither this book nor any part may be reproduced or transmitted in any form or by any means, electronic
or mechanical, including photocopying, microfilming, and recording, or by any information storage or
retrieval system, without prior permission in writing from the publisher.
All rights reserved. Authorization to photocopy items for internal or personal use, or the personal or
internal use of specific clients, may be granted by CRC Press, provided that $1.50 per page photocopied
is paid directly to Copyright Clearance Center, 222 Rosewood Drive, Danvers, MA 01923 USA. The fee
code for users of the Transactional Reporting Service is ISBN 0-8493-1287-6/05/$0.00+$1.50. The fee
is subject to change without notice. For organizations that have been granted a photocopy license by the
CCC, a separate system of payment has been arranged.
The consent of CRC Press does not extend to copying for general distribution, for promotion, for creating
new works, or for resale. Specific permission must be obtained in writing from CRC Press for such
copying.
Direct all inquiries to CRC Press, 2000 N.W. Corporate Blvd., Boca Raton, Florida 33431.
Trademark Notice: Product or corporate names may be trademarks or registered trademarks, and are
used only for identification and explanation, without intent to infringe.
Visit the CRC Press Web site at www.crcpress.com
© 2005 by CRC Press
No claim to original U.S. Government works
International Standard Book Number 0-8493-1287-6
Library of Congress Card Number 2004057046
Printed in the United States of America 1 2 3 4 5 6 7 8 9 0
Printed on acid-free paper
Copyright © 2005 CRC Press LLC
Methods & New Frontiers
in Neuroscience
Our goal in creating the Methods & New Frontiers in Neuroscience series is to
present the insights of experts on emerging experimental techniques and theoretical
concepts that are or will be at the vanguard of the study of neuroscience. Books in
the series cover topics ranging from methods to investigate apoptosis to modern
techniques for neural ensemble recordings in behaving animals. The series also
covers new and exciting multidisciplinary areas of brain research, such as computational neuroscience and neuroengineering, and describes breakthroughs in classical
fields such as behavioral neuroscience. We want these to be the books every neuroscientist will use in order to graduate students and postdoctoral fellows when they
are looking for guidance to start a new line of research.
Each book is edited by an expert and consists of chapters written by the leaders
in a particular field. Books are richly illustrated and contain comprehensive bibliographies. Chapters provide substantial background material relevant to the particular subject; hence, they are not only “methods” books. They contain detailed tricks
of the trade and information as to where these methods can be safely applied. In
addition, they include information about where to buy equipment and about Web
sites that are helpful in solving both practical and theoretical problems.
We hope that as the volumes become available, the effort put in by us, by the
publisher, by the book editors, and by the individual authors will contribute to the
further development of brain research. The extent to which we achieve this goal will
be determiend by the utility of these books.
Sidney A. Simon, Ph.D.
Miguel A.L. Nicolelis, M.D., Ph.D.
Series Editors
Copyright © 2005 CRC Press LLC
Preface
Voluntary movement is undoubtedly the overt basis of human behavior. Without
movement we cannot walk, nourish ourselves, communicate, or interact with the
environment. This is one of the reasons why the motor cortex was one of the first
cortical areas to be explored experimentally. Historically, the generation of motor
commands was thought to proceed in a rigidly serial and hierarchical fashion. The
traditional metaphor of the piano presents the premotor cortex “playing” the upper
motoneuron keys of the primary motor cortex (M1), which in turn activate with
strict point-to-point connectivity the lower motoneurons of the spinal cord. Years of
research have taught us that we may need to reexamine almost all aspects of this
model. Both the premotor and the primary motor cortex project directly to the spinal
cord in highly complex overlapping patterns, contradicting the simple hierarchical
view of motor control. The task of generating and controlling movements appears
to be subdivided into a number of subtasks that are accomplished through parallel
distributed processing in multiple motor areas. Multiple motor areas may increase
the behavioral flexibility by responding in a context-related way to any constraint
within the environment. Furthermore, although more and more knowledge is accumulating, there is still an ongoing debate about what is represented in the motor
cortex: dynamic parameters (such as specific muscle activation), kinematic parameters of the movement (for example, its direction and speed), or even more abstract
parameters such as the context of the movement. Given the great scope of the subject
considered here, this book focuses on some new perspectives developed from contemporary monkey and human studies. Moreover, many topics receive very limited
treatment.
Section I, which includes the first two chapters, uses functional neuroanatomy
and imaging studies to describe motor cortical function. The objective of Chapter 1
is to describe the major components of the structural framework employed by the
cerebral cortex to generate and control skeletomotor function. Dum and Strick
focus on motor areas in the frontal lobe that are the source of corticospinal projections to the ventral horn of the spinal cord in primates. These cortical areas include
the primary motor cortex (M1) and the six premotor areas that project directly to it.
The results presented lead to an emerging view that motor commands can arise from
multiple motor areas and that each of these motor areas makes a specialized contribution to the planning, execution, or control of voluntary movement. The purpose
of Chapter 2 is to provide an overview of the contribution of functional magnetic
resonance imaging (fMRI) to some of the prevailing topics in the study of motor
control and the function of the primary motor cortex. Kleinschmidt and Toni claim
that in several points the findings of functional neuroimaging seem to be in apparent
disagreement with those obtained with other methods, which cannot always be
attributed to insufficient sensitivity of this noninvasive technique. In part, it may
Copyright © 2005 CRC Press LLC
reflect the indirect and spatio-temporally imprecise nature of the fMRI signal, but
these studies remain informative by virtue of the fact that usually the whole brain
is covered. Not only does fMRI reveal plausible brain regions for the control of
localized effects, but the distribution of response foci and the correlation of effects
observed at many different sites can assist in the guidance of detailed studies at the
mesoscopic or microscopic spatio-temporal level. A prudently modest view might
conclude that fMRI is at present primarily a tool of exploratory rather than explanatory value.
Section II provides a large overview of studies about neural representations in
the motor cortex. Chapter 3 focuses on the neuromuscular evolution of individuated
finger movements. Schieber, Reilly, and Lang demonstrate that rather than acting
as a somatotopic array of upper motor neurons, each controlling a single muscle
that moves a single finger, neurons in the primary motor cortex (M1) act as a spatially
distributed network of very diverse elements, many of which have outputs that
diverge to facilitate multiple muscles acting on different fingers. This biological
control of a complex peripheral apparatus initially may appear unnecessarily complicated compared to the independent control of digits in a robotic hand, but can be
understood as the result of concurrent evolution of the peripheral neuromuscular
apparatus and its descending control from the motor cortex. Chapter 4 deals with
simultaneous movements of the two arms, as a simple example of complex movements, and may serve to test whether and how the brain generates unique representations of complex movements from their constituent elements. Vaadia and Cardoso
de Oliveira present evidence that bimanual representations indeed exist, both at the
level of single neurons and at the level of neuronal populations (in local field
potentials). They further show that population firing rates and dynamic interactions
between the hemispheres contain information about the bimanual movement to be
executed. In Chapter 5, Ashe discusses studies with respect to the debate as to
whether the motor cortex codes the spatial aspects (kinematics) of motor output,
such as direction, velocity, and position, or primarily controls, muscles, and forces
(dynamics). Although the weight of evidence is in favor of M1 controlling spatial
output, the effect of limb biomechanics and forces on motor cortex activity is beyond
dispute. The author proposes that the motor cortex indeed codes for the most
behaviorally relevant spatial variables and that both spatial variables and limb biomechanics are reflected in motor cortex activity. Chapter 6 starts with the important
issue of how theoretical concepts guide experimental design and data analysis. Scott
describes two conceptual frameworks for interpreting neural activity during reaching: sensorimotor transformations and internal models. He claims that sensorimotor
transformation have been used extensively over the past 20 years to guide neurophysiological experiments on reaching, whereas internal models have only recently
had an impact on experimental design. Furthermore, the chapter demonstrates how
the notion of internal models can be used to explore the neural basis of movement
by describing a new experimental tool that can sense and perturb multiple-joint
planar movements. Chapter 7 deals with the function of oscillatory potentials in the
motor cortex. MacKay notes that from their earliest recognition, oscillatory EEG
signals in the sensorimotor cortex have been associated with stasis: a lack of movement, static postures, and possibly physiological tremor. It is now established that
Copyright © 2005 CRC Press LLC
10-, 20-, and 40-Hz motor cortical oscillations are associated with constant, sustained
muscle contractions, again a static condition. Sigma band oscillations of about 14 Hz
may be indicative of maintained active suppression of a motor response. The dynamic
phase at the onset of an intended movement is preceded by a marked decrease in
oscillatory power, but not all frequencies are suppressed. Fast gamma oscillations
coincide with movement onset. Moreover, there is increasing evidence that oscillatory potentials of even low frequencies (4–12 Hz) may be linked to dynamic episodes
of movement. Most surprisingly, the 8-Hz cortical oscillation — the neurogenic
component of physiological tremor — is emerging as a major factor in shaping the
pulsatile dynamic microstructure of movement, and possibly in coordinating diverse
actions performed together. In Chapter 8, Riehle discusses the main aspects of
preparatory processes in the motor cortex. Preparation for action is thought to be
based on central processes, which are responsible for maximizing the efficiency of
motor performance. A strong argument in favor of such an efficiency hypothesis of
preparatory processes is the fact that providing prior information about movement
parameters or removing time uncertainty about when to move significantly shortens
reaction time. The types of changes in the neuronal activity of the motor cortex, and
their selectivity during preparation, are portrayed and compared with other cortical
areas that are involved in motor behavior. Furthermore, linking motor cortical activity
directly to behavioral performance showed that the trial-by-trial correlation between
single neuron firing rates and reaction time revealed strong task-related cortical
dynamics. Finally, the cooperative interplay among neurons, expressed by precise
synchronization of their action potentials, is illustrated and compared with changes
in the firing rate of the same neurons. New concepts including the notion of coordinated ensemble activity and their functional implication during movement preparation are discussed. In the last chapter of Section II, Chapter 9, Jeannerod poses
the question of the role of the motor cortex in motor cognition. The classical view
of the primary motor cortex holds that it is an area devoted to transferring motor
execution messages that have been elaborated upstream in the cerebral cortex. More
recently, however, experimental data have pointed to the fact that the relation of
motor cortex activity to the production of movements is not as simple as was thought
on the basis of early stimulation experiments. This revision of motor cortical function
originated from two main lines of research, dealing first with the plasticity of the
somatotopic organization of the primary motor cortex, and second with its involvement in cognitive functions such as motor imagery.
Section III is mainly concerned with motor learning. Chapter 10 explores various
conditions of mapping between sensory input and motor output. Brasted and Wise
claim that studies on the role of the motor cortex in voluntary movement usually
focus on standard sensorimotor mapping, in which movements are directed toward
sensory cues. Sensorimotor behavior can, however, show much greater flexibility.
Some variants rely on an algorithmic transform between the location of the cue and
that of the target. The well-known “antisaccade” task and its analogues in reaching
serve as special cases of such transformational mapping, one form of nonstandard
mapping. Other forms of nonstandard mapping differ strongly: they are arbitrary. In
arbitrary sensorimotor mapping, the cue’s location has no systematic spatial relationship with the response. The authors explore several types of arbitrary mapping,
Copyright © 2005 CRC Press LLC
with emphasis on the neural basis of learning. In Chapter 11, Shadmehr, Donchin,
Hwang, Hemminger, and Rao deal with internal models that transform the desired
movement into a motor command. When one moves the hand from one point to
another, the brain guides the arm by relying on neural structures that estimate the
physical dynamics of the task. Internal models are learned with practice and are a
fundamental part of voluntary motor control. What do internal models compute, and
which neural structures perform that computation? The authors approach these
questions by considering a task where the physical dynamics of reaching movements
are altered by force fields that act on the hand. Many studies suggest that internal
models are sensorimotor transformations that map a desired sensory state of the arm
into an estimate of forces; i.e., a model of the inverse dynamics of the task. If this
computation is represented as a population code via a flexible combination of basis
functions, then one can infer activity fields of the bases from the patterns of generalization. Shadmehr and colleagues provide a mathematical technique that facilitates
this inference by analyzing trial-by-trial changes in performance. Results suggest
that internal models are computed with bases that are directionally tuned to limb
motion in intrinsic coordinates of joints and muscles, and this tuning is modulated
multiplicatively as a function of static position of the limb. That is, limb position
acts as a gain field on directional tuning. Some of these properties are consistent
with activity fields of neurons in the motor cortex and the cerebellum. The authors
suggest that activity fields of these cells are reflected in human behavior in the way
that we learn and generalize patterns of dynamics in reaching movements. In the
last chapter of Section III, Chapter 12, Padoa-Schioppa, Bizzi, and Mussa-Ivaldi
address the question of the cortical control of motor learning. In robotic systems,
engineers coordinate the action of multiple motors by writing computer codes that
specify how the motors must be activated for achieving the desired robot motion
and for compensating unexpected disturbance. Humans and animals follow another
path. Something akin to programming is achieved in nature by the biological mechanisms of synaptic plasticity — that is, by the variation in efficacy of neural transmission brought about by past history of pre- and post-synaptic signals. However,
robots and animals differ in another important way. Robots have a fixed mechanical
structure and dimensions. In contrast, the mechanics of muscles, bones, and ligaments change in time. Because of these changes, the central nervous system must
continuously adapt motor commands to the mechanics of the body. Adaptation is a
form of motor learning. Here, a view of motor learning is presented that starts from
the analysis of the computational problems associated with the execution of the
simplest gestures. The authors discuss the theoretical idea of internal models and
present some evidence and theoretical considerations suggesting that internal models
of limb dynamics may be obtained by the combination of simple modules or “motor
primitives.” Their findings suggest that the motor cortical areas include neurons that
process well-acquired movements as well as neurons that change their behavior
during and after being exposed to a new task.
The last section, Section IV, is devoted to the reconstruction of movements using
brain activity. For decades, science fiction authors anticipated the view that computers can be made to communicate directly with the brain. Now, a rapidly expanding
science community is making this a reality. In Chapter 13, Carmena and Nicolelis
Copyright © 2005 CRC Press LLC
present and discuss the recent research in the field of brain–machine interfaces (BMI)
conducted mainly on nonhuman primates. In fact, this research field has supported
the contention that we are at the brink of a technological revolution, where artificial
devices may be “integrated” in the multiple sensory, motor, and cognitive representations that exist in the primate brain. These studies have demonstrated that animals
can learn to utilize their brain activity to control the displacements of computer
cursors, the movements of simple and elaborate robot arms, and, more recently, the
reaching and grasping movements of a robot arm. In addition to the current research
performed in rodents and primates, there are also preliminary studies using human
subjects. The ultimate goal of this emerging field of BMI is to allow human subjects
to interact effortlessly with a variety of actuators and sensory devices through the
expression of their voluntary brain activity, either for augmenting or restoring sensory, motor, and cognitive function. In the last chapter, Chapter 14, Pfurtscheller,
Neuper, and Birbaumer deal with BMIs, which transform signals originating from
the human brain into commands that can control devices or applications. BCIs
provide a new nonmuscular communication channel, which can be used to assist
patients who have highly compromised motor functions, as is the case with patients
suffering from neurological diseases such as amyotrophic lateral sclerosis (ALS) or
brainstem stroke. The immediate goal of current research in this field is to provide
these users with an opportunity to communicate with their environment. Presentday BCI systems use different electrophysiological signals such as slow cortical
potentials, evoked potentials, and oscillatory activity recorded from scalp or subdural
electrodes, and cortical neuronal activity recorded from implanted electrodes. Due
to advances in methods of signal processing, it is possible that specific features
automatically extracted from the electroencephalogram (EEG) and electrocorticogram (ECoG) can be used to operate computer-controlled devices. The interaction
between the BCI system and the user, in terms of adaptation and learning, is a
challenging aspect of any BCI development and application.
It is the increased understanding of neuronal mechanisms of motor functions,
as reflected in this book, that led to the success of BCI. Yet, the success in tapping
and interpreting neuronal activity and interfacing it with a machine that eventually
executes the subject’s intention is amazing, considering the limited understanding
we have of the system as a whole.
Perhaps ironically, the proof of our understanding of motor cortical activity will
stem from how effectively we, as external observers of the brain, can tap into it and
make use of it.
Alexa Riehle
Eilon Vaadia
Copyright © 2005 CRC Press LLC
Dedication
to Hanns-Günther Riehle
Copyright © 2005 CRC Press LLC
Editors
Alexa Riehle received a B.Sc. degree in biology (main topic: deciphering microcircuitries in the frog retina) from the Free University, Berlin, Germany, in 1976, and
a Ph.D. degree in neurophysiology (main topic: neuronal mechanisms of temporal
aspects of color vision in the honey bee) from the Biology Department of the Free
University in 1980.
From 1980 to 1984, she was a postdoctoral fellow at the National Center for
Scientific Research (CNRS) in Marseille, France (main topic: neuronal mechanisms
of elementary motion detectors in the fly visual system). In 1984, she moved to the
Cognitive Neuroscience Department at the CNRS and has been mainly interested
since then in the study of cortical information processing and neural coding in cortical
ensembles during movement preparation and execution in nonhuman primates.
Eilon Vaadia graduated from the Hebrew University of Jerusalem (HUJI) in 1980
and joined the Department of Physiology at Hadassah Medical School after postdoctoral studies in the Department of Biomedical Engineering at Johns Hopkins
University Medical School in Baltimore, Maryland.
Vaadia studies cortical mechanisms of sensorimotor functions by combining
experimental work (recordings of multiple unit activity in the cortex of behaving
animals) with a computational approach. He is currently the director of the Department of Physiology and the head of the Ph.D. program at the Interdisciplinary Center
for Neural Computation (ICNC) at HUJI, and a director of a European advanced
course in computational neuroscience.
Copyright © 2005 CRC Press LLC
Contributors
James Ashe
Veterans Affairs Medical Center
Brain Sciences Center
University of Minnesota
Minneapolis, Minnesota
Richard P. Dum
Department of Neurobiology
University of Pittsburgh School of
Medicine
Pittsburgh, Pennsylvania
Emilio Bizzi
Department of Brain and Cognitive
Sciences
Massachusetts Institute of Technology
Cambridge, Massachusetts
Sarah E. Hemminger
Laboratory for Computational Motor
Control
Department of Biomedical Engineering
Johns Hopkins School of Medicine
Baltimore, Maryland
Niels Birbaumer
Institute of Medical Psychology and
Behavioral Neurobiology
Eberhard-Karls-University of Tübingen
Tübingen, Germany
Peter J. Brasted
Laboratory of Systems Neuroscience
National Institute of Mental Health
National Institutes of Health
Bethesda, Maryland
Simone Cardoso de Oliveira
German Primate Center
Cognitive Neuroscience Laboratory
Göttingen, Germany
Jose M. Carmena
Center for Neuroengineering
Department of Neurobiology
Duke University Medical Center
Durham, North Carolina
Opher Donchin
Laboratory for Computational Motor
Control
Department of Biomedical Engineering
Johns Hopkins School of Medicine
Baltimore, Maryland
Copyright © 2005 CRC Press LLC
Eun-Jung Hwang
Laboratory for Computational Motor
Control
Department of Biomedical Engineering
Johns Hopkins School of Medicine
Baltimore, Maryland
Marc Jeannerod
Institute of Cognitive Sciences
National Center for Scientific Research
(ISC-CNRS)
Bron, France
Andreas Kleinschmidt
Cognitive Neurology Unit
Department of Neurology
Johann Wolfgang Goethe University
Frankfurt am Main, Germany
Catherine E. Lang
University of Rochester
Department of Neurology
Rochester, New York
William A. MacKay
Department of Physiology
University of Toronto
Toronto, Ontario, Canada
Ferdinando A. Mussa-Ivaldi
Departments of Physiology,
Physical Medicine and Rehabilitation,
and Biomedical Engineering
Northwestern University
Chicago, Illinois
Christa Neuper
Ludwig Boltzmann Institute of Medical
Informatics and Neuroinformatics
Graz University of Technology
Graz, Austria
Miguel A.L. Nicolelis
Department of Neurobiology
Duke University Medical Center
Durham, North Carolina
Camillo Padoa-Schioppa
Department of Neurobiology
Harvard Medical School
Boston, Massachusetts
Gert Pfurtscheller
Laboratory of Brain–Computer
Interfaces
Graz University of Technology
Graz, Austria
Marc H. Schieber
University of Rochester
Department of Neurology
Rochester, New York
Stephen H. Scott
Centre for Neuroscience Studies
Department of Anatomy and Cell
Biology
Canadian Institutes of Health Research
Group in Sensory-Motor Systems
Queen’s University
Kingston, Ontario
Reza Shadmehr
Laboratory for Computational Motor
Control
Department of Biomedical Engineering
Johns Hopkins School of Medicine
Baltimore, Maryland
Peter L. Strick
Veterans Affairs Medical Center for the
Neural Basis of Cognition
Department of Neurobiology
University of Pittsburgh
Pittsburgh, Pennsylvania
Ashwini K. Rao
Columbia University Medical Center
Program in Physical Therapy
Neurological Institute
New York, New York
Ivan Toni
F.C. Donders Center for Cognitive
Neuroimaging
Nijmegen, The Netherlands
Karen T. Reilly
University of Rochester
Department of Neurology
Rochester, New York
Eilon Vaadia
Department of Physiology
Hadassah Medical School
The Hebrew University
Jerusalem, Israel
Alexa Riehle
Mediterranean Institute for Cognitive
Neuroscience
Natinoal Center for Scientific Research
(INCM-CNRS)
Marseille, France
Copyright © 2005 CRC Press LLC
Steven P. Wise
Laboratory of Systems Neuroscience
National Institute of Mental Health
National Institutes of Health
Bethesda, Maryland
Table of Contents
SECTION I Functional Neuroanatomy and
Imaging
Chapter 1
Motor Areas in the Frontal Lobe: The Anatomical Substrate
for the Central Control of Movement
Richard P. Dum and Peter L. Strick
Chapter 2
Functional Magnetic Resonance Imaging of the Human Motor
Cortex
Andreas Kleinschmidt and Ivan Toni
SECTION II Neuronal Representations in the
Motor Cortex
Chapter 3
Motor Cortex Control of a Complex Peripheral Apparatus: The
Neuromuscular Evolution of Individuated Finger Movements
Marc H. Schieber, Karen T. Reilly, and Catherine E. Lang
Chapter 4
Neuronal Representations of Bimanual Movements
Eilon Vaadia and Simone Cardoso de Oliveira
Chapter 5
What Is Coded in the Primary Motor Cortex?
James Ashe
Chapter 6
Conceptual Frameworks for Interpreting Motor Cortical Function:
New Insights from a Planar Multiple-Joint Paradigm
Stephen H. Scott
Chapter 7
Wheels of Motion: Oscillatory Potentials in the Motor Cortex
William A. MacKay
Copyright © 2005 CRC Press LLC
Chapter 8
Preparation for Action: One of the Key Functions of the Motor
Cortex
Alexa Riehle
Chapter 9
Is the Motor Cortex Only an Executive Area? Its Role in Motor
Cognition
Marc Jeannerod
SECTION III Motor Learning and Performance
Chapter 10 The Arbitrary Mapping of Sensory Inputs to Voluntary and
Involuntary Movement: Learning-Dependent Activity in the
Motor Cortex and Other Telencephalic Networks
Peter J. Brasted and Steven P. Wise
Chapter 11 Learning Dynamics of Reaching
Reza Shadmehr, Opher Donchin, Eun-Jung Hwang, Sarah E. Hemminger, and
Ashwini K. Rao
Chapter 12 Cortical Control of Motor Learning
Camillo Padoa-Schioppa, Emilio Bizzi, and Ferdinando A. Mussa-Ivaldi
SECTION IV Reconstruction of Movements Using
Brain Activity
Chapter 13 Advances in Brain–Machine Interfaces
Jose M. Carmena and Miguel A.L. Nicolelis
Chapter 14 Human Brain–Computer Interface
Gert Pfurtscheller, Christa Neuper, and Niels Birbaumer
Copyright © 2005 CRC Press LLC
Section I
Functional Neuroanatomy
and Imaging
Copyright © 2005 CRC Press LLC
1
Motor Areas in the
Frontal Lobe: The
Anatomical Substrate
for the Central Control
of Movement
Richard P. Dum and Peter L. Strick
CONTENTS
1.1
1.2
1.3
Introduction
Functional Anatomy
1.2.1 Primary Motor Cortex
1.2.1.1 Organization Based on Intracortical Stimulation
1.2.1.2 Output of Single Corticomotoneuronal Cells
1.2.1.3 Peripheral Input to M1
1.2.2 Premotor Areas
1.2.2.1 Identification by Direct Projections to M1
1.2.2.2 Somatotopic Organization Based on Connections with
M1
1.2.2.3 Corticospinal Output
1.2.2.4 Somatotopic Organization Based on Corticospinal
Output: Forelimb and Hindlimb Representation
1.2.2.5 Somatotopic Organization Based on Corticospinal
Output: Proximal and Distal Arm Representation
1.2.2.6 Organization Based on Intracortical Stimulation
1.2.3 Corticospinal Terminations
1.2.3.1 Primary Motor Cortex
1.2.3.2 Premotor Areas
Cortical Inputs to the Motor Areas
1.3.1 Primary Motor Cortex
1.3.1.1 Frontal Cortex
1.3.1.2 Parietal Cortex
1.3.2 Premotor Areas
0-8493-1287-6/05/$0.00+$1.50
© 2005 by CRC Press LLC
Copyright © 2005 CRC Press LLC
1.3.2.1 Interconnections among the Motor Areas
1.3.2.2 Parietal Cortex
1.3.2.3 Pre-Premotor Cortex
1.3.2.4 Prefrontal Cortex
1.3.2.5 Limbic Cortex
1.3.3 Summary of Cortical Connections
1.4 Subcortical Inputs
1.5 Summary and Conclusions
Acknowledgments
References
1.1 INTRODUCTION
The objective of this chapter is to describe the major components of the structural
framework employed by the cerebral cortex to generate and control skeletomotor
function. We will focus on motor areas in the frontal lobe that are the source of
corticospinal projections to the ventral horn of the spinal cord in primates. These
cortical areas include the primary motor cortex (M1) and the six premotor areas that
project directly to M1. We will begin by examining anatomical and physiological
evidence that demonstrates how each of these cortical areas directly accesses spinal
cord mechanisms involved in the generation and control of movement. This evidence
suggests that all these cortical areas have some direct involvement in movement
execution. Then we will examine how the pattern of cortical and subcortical inputs
could shape the functional role of each cortical area in motor control. We will show
that each of these cortical areas receives a unique pattern of cortical and subcortical
input. Taken together, these results have led to an emerging view that motor commands
can arise from multiple motor areas and that each of these motor areas makes a
specialized contribution to the planning, execution, or control of voluntary movement.
In this chapter, we will describe some of the relevant anatomical and physiological
evidence that has led to this viewpoint.
Given the breadth of the subject considered here, our review will focus on new
perspectives developed from contemporary primate studies. Even with this focus,
many topics will receive limited treatment. For instance, the physiological and
behavioral studies that provide evidence of differential involvement of each motor
area in the generation and control of movement are beyond the scope of this chapter.
For further insight into the historical development of this field and a broader coverage
of related issues, numerous reviews on this and related topics are available.1–11 In
addition, the corticospinal system has been the subject of a recent book.12
1.2 FUNCTIONAL ANATOMY
1.2.1 PRIMARY MOTOR CORTEX
The primary motor cortex (M1) owes its name to the fact that thresholds for evoking
movement with electrical stimulation are lower here than in any other cortical
region.13–15 (For historical review, see Reference 12.) Anatomically, M1 corresponds
Copyright © 2005 CRC Press LLC
SMA
preSMA
9m
PE
PEc
PEci
CMAd
CMAv
CMAr
24a,b
CgS
SI
M1
(F3)
(F6)
PGm
CGp
V6A
23a,b
PEc
V6
PE
MIP
V6A
CS
SEF
prePMd
PE
PMd
(F7)
9l
PG
(F4)
46v
AIP
IPS
PFG
PMv
ArS
V6
VIP
LIP
IPS
SI
(F1)
FEF
46d
PS
M1
(F2)
PEip
PEc
(F5)
PFGop
PF
12l
PFop
OFC
LS
PrCO
SII
Ig
1 cm
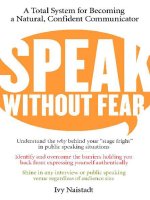
FIGURE 1.1 Identification of cortical areas in the macaque monkey. The cingulate sulcus
(CgS), lateral sulcus (LS), and intraparietal sulcus (IPS) are unfolded and each fundus is
indicated by a dashed line. The borders between cytoarchitectonic areas are delineated with
dotted lines. M1 and the premotor areas are shaded. Abbreviations: AIP, LIP, MIP, VIP:
anterior, lateral, medial, and ventral intraparietal areas; ArS: arcuate sulcus; CGp: posterior
cingulate gyrus; CMAd, CMAv, CMAr: dorsal, ventral, and rostral cingulate motor areas;
CS: central sulcus; F1 to F7: cytoarchitectonic areas in the frontal lobe according to Matelli
et al.77,248; FEF: frontal eye fields; Ig: granular insular cortex; M1: primary motor cortex;
OFC: orbital frontal cortex; PMd: dorsal premotor area; PMv: ventral premotor area; PrCO:
precentral opercular cortex; prePMd: pre-premotor area, dorsal; preSMA: presupplementary
motor area; PS: principal sulcus; SEF: supplementary eye field; SI: primary somatosensory
cortex; SII: secondary somatosensory cortex; SMA: supplementary motor area; PE, PEc, PEci,
PF, PFG, PFop, PG, PGm, Pgop: parietal areas after Pandya and Selzer249; V6A, V6: posterior
parietal areas after Galletti et al.177; 9m, 9l, 46d, 46v, 12l: prefrontal areas after Walker181 and
Barbas and Pandya.186
to cytoarchitectonic area 4, which is identified by the presence of giant pyramidal
cells in cortical layer V.16–18 Based on these definitions, M1 is located in the anterior
bank of the central sulcus and on the adjacent caudal portion of the precentral gyrus
(Figure 1.1). (For more complete reviews, see References 4,5,9,12.)
Copyright © 2005 CRC Press LLC
1.2.1.1 Organization Based on Intracortical Stimulation
Our view of the organization of M1 as based on electrical stimulation has evolved
with advances in stimulation techniques. Classically, surface stimulation suggested
that M1 contained a “motor map” that was a single, contiguous representation of
the body.14,15 (For reviews, see References 4 and 12.) In this map, the leg, trunk,
arm, and face formed a medial to lateral procession across M1 with the distal
musculature of each limb located in the central sulcus. Electrical stimulation with
microelectrodes inserted into the cortex lowered the amount of current necessary to
evoke movement by a factor of 100.19 Although this advance allowed a much more
detailed exploration of the cortex, intracortical stimulation confirmed the overall
somatotopy of leg, arm, and face representation described by surface stimulation.19–32
Thus, electrical stimulation of M1 generated a somatotopic motor map with relatively
sharp boundaries between major body parts.
The organization of movements generated by intracortical stimulation within
each major body part, however, was more complex than that produced by surface
stimulation (Color Figure 1.2).* A consistent observation was that the same movement could be evoked at multiple, spatially separate sites.22–32 Although this observation precluded an orderly somatotopy, the general features of this map were
reproducible. Within the arm representation of macaque monkeys, distal limb movements (fingers and wrist) tended to form a central core that was surrounded by a
horseshoe of proximal limb movements (elbow and shoulder) (Color Figure
1.2A).22,33 Some intermingling of distal and proximal limb movements occurred at
the borders. This organizational structure has been confirmed with single-pulse,
stimulus-triggered averaging (Color Figure 1.2B).34 The presence of multiple representations of an individual movement/muscle in M1 has been proposed as an arrangement that allows a muscle to engage in multiple synergies with other muscles acting
at the same or different joints. (See Reference 35.)
Other studies utilizing intracortical stimulation20,26,28,32 reported even more complex patterns of muscle activation. For example, stimulation at some sites in M1
evoked reciprocal activation of wrist antagonists, whereas at other sites it caused
their co-contraction.26 Some stimulus locations evoked movements of several joints
at barely differing thresholds. Thus, multiple-joint movements could also be evoked
by relatively localized stimulation. These more complex relationships may allow
“automatic” coordination of postural stabilization of the proximal limb during object
manipulation by the distal limb musculature.
More recently, long trains (0.5 to 1.0 sec) of supra-threshold intracortical stimulation have been reported to evoke coordinated forelimb movements in the awake
primate (Color Figure 1.2C).36 Each stimulation site produced a stereotyped posture
in which the arm moved to the same final position regardless of its posture at the
initiation of stimulation. In the most complex example, the monkey formed a frozen
pose with the hand in a grasping position in front of the open mouth. The map of
final hand location in the workspace in front of the monkey included both M1 and
the premotor cortex (Color Figure 1.2C). In many respects, these results were a more
* Please see color insert following page 170.
Copyright © 2005 CRC Press LLC
Medial
A
Ce
ntr
al
Sul
cus
, Ant
erior Bank
Elbow
Elbow
Wrist
Rostral
Shoulder
Fundus
Wrist
Shoulder
Elbow
Digits
Digits + Wrist
Wrist
Wrist
Digits
Digits + Wrist
Wrist
Shoulder
Shoulder
Area 6
Area 3a
Area 4
2 mm
FIGURE 1.2 (see color figure) Intracortical stimulation maps of M1 in macaque monkeys.
Note that in each map, hand movements form a central core (red). (A) Summary map of the
movements evoked by intracortical stimulation (2–30 µA) in an awake macaque monkey.
(Adapted with permission from Reference 22.) (B) Summary map of muscle representation
in M1 derived from stimulus-triggered averages of rectified EMG activity (15 µA at 15 Hz)
in an awake monkey. Sites that influenced only proximal muscles are indicated by light
shading, those that influenced only distal muscles by dark shading, and those sites that
influenced both proximal and distal muscles by intermediate shading. Sites of significant
stimulus-triggered averages of rectified EMG activity for the shorthead of biceps (BIS, blue)
and extensor digitorum communis (EDC, red) are indicated with size-coded dots (3, 4, 5,
6 S.D. levels above pre-trigger level baseline activity). (Adapted with permission from Reference 34.) (C) Summary of hand and arm postures produced by long train (0.5 sec), high
intensity (25–150 µA) intracortical stimulation in M1, the PMd, and the PMv of an awake
monkey. Arm sites evoked postures involving the arm but without changes in the configuration
of the hand. Hand + arm indicates sites where stimulation evoked postures involving both
the hand and arm. Hand to mouth indicates sites that evoked grasp-like movements of the
hand which was brought to the mouth. Bimodal/defensive indicates sites where neurons
received visual input and stimulation moved the arm into a defensive posture. See text for
further explanation. (Adapted with permission from Reference 36.)
detailed equivalent of observations made initially by Ferrier37 who reported that in
M1 “long-continued stimulation brings the hand to the mouth, and at the same time
the angle of the mouth is retracted and elevated.” The interpretation of these complex
movements is limited by the fact that intracortical stimulation primarily activates
neurons trans-synaptically, and thereby enlarges its sphere of activation.38,39 (See
also References 40,41.) At the extreme, long stimulus trains and high stimulus
intensities open the route for interactions at multiple levels, including local, cortical,
subcortical, and spinal. Thus, intracortical stimulation is unable to determine the
Copyright © 2005 CRC Press LLC
B
10
Central Sulcus
5
0
C
Hindlim
Trunk
T
5
ArS
Fund
us
10
CS
2 mm
EDC
BIS 15
Face
Distal
Distal + Proximal
Arm
Hand + arm
Bimodal/defensive
Hand to Mouth
Proximal
FIGURE 1.2 (continued)
output structure of M1 unambiguously or to ascertain the functional organization of
a cortical motor area.
1.2.1.2 Output of Single Corticomotoneuronal Cells
A more focused approach to examining the output structure of M1 has been to
determine the axonal branching patterns of single corticospinal neurons. Both physiological and anatomical studies provide evidence that single corticospinal neurons
may have a rather widespread influence in the spinal cord. A substantial proportion
of corticospinal neurons (43%) innervates several segments of the spinal cord.42
Reconstruction of individual corticospinal axons filled with an intracellular tracer
reveals terminal arbors located in as many as four separate motor nuclei.43 Thus, a
single corticospinal axon can directly influence several muscles.
These anatomical observations are consistent with the results of studies employing the spike-triggered averaging technique to examine the divergence of single
corticomotoneuronal (CM) cells.44–49 (For review see Reference 6.) In this technique,
electromyographic (EMG) activity of a sampled muscle was averaged following
each action potential of a single CM cell. Averaged muscle activity exhibiting
facilitation or suppression at a short latency after the spike was considered to indicate
a connection between the CM cell and the muscle’s motoneurons. Most CM cells
(71%) produced post-spike effects in two or more muscles (mean = 3.1, maximum
10 of 24.49 Many of the post-spike effects were confined to distal muscles (45%)
and some were found in proximal muscles (10%). Remarkably, the remaining 45%
of CM neurons produced post-spike effects in both distal and proximal muscles.
This result strongly suggests that single CM neurons can influence muscles at both
proximal and distal joints.
Copyright © 2005 CRC Press LLC
The size of the branching patterns of individual CM cells appears to be related
to the muscles they innervate. CM cells that influence both proximal and distal
muscles have wider branching patterns than those that project to either proximal or
distal muscles.49 In addition, half of the CM cells that facilitate intrinsic hand muscles
targeted just one of the muscles sampled.48 These observations suggest that CM cells
have more restricted branching to distal muscles than they do to proximal muscles.
Lemon and colleagues50–52 have emphasized, on the basis of electrophysiological
data from macaque and squirrel monkeys, that direct CM projections are important
for the control of grasp. Although Schieber35 has argued that restricted branching is
not a requirement for producing individuated finger movements, the restricted
branching of some CM cells suggests that they may be specialized to control
individual finger muscles.
The limited branching patterns of some CM neurons as well as the observation
that small clusters of CM neurons tend to innervate the same motoneuron pool42,46
may explain why intracortical stimulation can evoke contractions of a single muscle
at threshold.19 This raises the possibility that a framework for muscle representation
exists at the level of small clusters of neurons. On the other hand, the highly divergent
projections of many CM neurons are consistent with some of the more complex,
multiple-joint movements observed with other variations of the intracortical stimulation technique.26,36 Thus, adjustment of the parameters of intracortical stimulation
may promote access to different structural features of the output organization of M1
as well as other portions of the motor system.
1.2.1.3 Peripheral Input to M1
Another type of map within M1 concerns the responses of its neurons to peripheral
somatosensory stimulation. In both New and Old World primates, neurons in the
caudal part of the forelimb representation of M1 were activated by peripheral input
predominantly from cutaneous afferents.25,53–55 In contrast, neurons in the rostral part
of the M1 forelimb representation were driven by peripheral afferents originating
largely from muscles or joints. A similar segregation of peripheral input has been
observed in the hindlimb representation of M1 in the macaque.24 Strick and Preston54
have proposed that the segregation of peripheral inputs within M1 may represent a
functional specialization designed to solve tasks demanding high levels of sensory–motor integration. For example, the portion of the hand representation in M1
that receives largely cutaneous input may be specialized to control finger coordination during object manipulation. Thus, the internal organization of M1 is quite
complicated and may include multiple, overlapping maps of sensory input and motor
output.
1.2.2 PREMOTOR AREAS
The identification and characterization of the premotor cortex has been the subject
of some controversy and considerable revision over the last century.2,9,15,56–61 The
term “premotor cortex” was originally applied to the portion of agranular cortex
(area 6) located anterior to M1 (Figure 1.1).56,62 However, this cytoarchitectonically
Copyright © 2005 CRC Press LLC
designated premotor cortex turned out to be functionally heterogeneous. For example,
electrical stimulation of area 6 on the medial wall revealed a complete motor map
of the body in a region that has been subsequently subdivided into the supplementary
motor area (SMA) and presupplementary motor area (preSMA) (Figure 1.1).15,63
(See below.) On the lateral surface, attempts to define the boundaries of the premotor
cortex using electrical stimulation or cytoarchitectonic criteria failed to produce a
consensus.9,61
1.2.2.1 Identification by Direct Projections to M1
A more recent approach for determining the location of premotor cortex has been
based on its neuroanatomical connections. The premotor cortex in non-human primates has been operationally defined as consisting of those regions in the frontal
lobe that have direct projections to M1 (For review see References 9,59,60,64–66.)
According to this definition, the frontal lobe contains at least six spatially separate
premotor areas (Figures 1.1 and 1.3A). For example, the arm representation of M1
receives projections from two rostrally adjacent regions on the lateral surface: the
ventral premotor area (PMv) and the dorsal premotor area (PMd) (Figure 1.3A).
The PMv is located in the portion of area 6 that is lateral to the arcuate spur and
extends rostrally into the posterior bank of the inferior limb of the arcuate sulcus.
The PMd occupies the portion of area 6 that is medial to the fundus of the arcuate
spur and caudal to the genu of the arcuate sulcus. Its caudal extent typically includes
the cortex within the superior precentral sulcus (Figures 1.1, 1.3A, and 1.4).
Four premotor areas are located on the medial wall of the hemisphere (Figures 1.1,
1.3A, and 1.4). These premotor areas include the SMA and three motor areas located
within the cingulate sulcus: the rostral, dorsal, and ventral cingulate motor areas
(CMAr, CMAd, and CMAv). The SMA is confined to the portion of area 6 on the
mesial surface of the superior frontal gyrus that lies between the arcuate genu
rostrally and the hindlimb representation in M1 caudally. The CMAr is located within
area 24c on the dorsal and ventral banks of the cingulate sulcus at levels largely
anterior to the genu of the arcuate sulcus. The CMAd occupies area 6c on the dorsal
bank of the cingulate sulcus at levels caudal to the genu of the arcuate sulcus. The
CMAv lies on the ventral bank of the cingulate sulcus in area 23c, mostly at the
same levels as the CMAd. Thus, the premotor cortex, as defined by its anatomical
connections to M1, is more complicated than previously recognized (for review see
References 2,3,8,15,57,62) and is composed of multiple, spatially separate premotor
areas (Figures 1.1, 1.3, and 1.4).59,60,67–69 (See also References 70–76.)
The portion of area 6 (area 6aB)17 that lies dorsal and anterior to the genu of
the arcuate sulcus can no longer be considered as part of the premotor cortex because
it lacks direct connections with M1. In fact, the connections of these rostral portions
of area 6 suggest that they are more properly considered regions of the prefrontal
cortex (see below). On the medial wall, this rostral portion of area 6 (area F677,78)
has been recognized as a separate functional region and termed the preSMA (Figures
1.1 and 1.4).65,79,80 Similarly, on the lateral surface, the rostral portion of area 6 (area
F777,78) has been termed the prePMd (Figures 1.1 and 1.4). (For review see Reference
Copyright © 2005 CRC Press LLC
A. M1 Digit (OM4)
B. C7-T1 Spinal Cord (H1)
CC
CgSv
CMAr
CMAd
CgSd
SGm
Ventral
CMAv
CgG
CgSv
Dorsal
CgG
Dorsal
Ventral
CC
CgSd
SGm
Midline
Midline
SMA
CS
CS
PMd
ArS
PS
ArS
PS
M1
Medial
PMv
PMv
LS
Caudal
5 mm
11-137
8-10
5-7
2-4
1
LS
5-27
4
3
2
1
FIGURE 1.3 Identification of premotor areas in the frontal lobe. (A) Premotor areas project
to M1. An unfolded map of the frontal lobe depicts the density of labeled neurons after
WGA–HRP injections into the physiologically identified digit representation of M1 in the
macaque monkey. (For details of the unfolding and the determination of cell density, see Dum
and Strick.60) The medial wall is unfolded and reflected upward from the midline so that it
appears upside down. The lip of each sulcus (solid line) and its fundus (dashed line) are
indicated. The labeled neurons in the PMv (arrow) are located in the posterior bank of the
arcuate sulcus and have been projected to the surface. This projection to the surface artificially
increases the displayed density. (B) Premotor areas project to the spinal cord. An unfolded
map of the frontal lobe shows the density of labeled corticospinal neurons after injections of
a fluorescent tracer into the C7–T1 segments of the spinal cord. Abbreviations: CC: corpus
callosum; CgSd: dorsal bank of the cingulate sulcus; CgSv: ventral bank of the cingulate
sulcus; SGm: medial superior frontal gyrus. (Reproduced with permission from Reference 64.)
66.) Thus, the current definition of premotor cortex includes multiple premotor areas
located in the caudal half of area 6 as well as in additional regions within the cingulate
sulcus that were historically considered part of the limbic cortex.9
1.2.2.2 Somatotopic Organization Based on Connections with M1
The somatotopic organization of the premotor areas has been evaluated based of
their projections to the arm, leg, and face representations of M1.59,60,64,67–69,71–76,81,82
A number of general conclusions have come from these studies. Some premotor
Copyright © 2005 CRC Press LLC
CC
23a
CgG
,b
24a,b
Arm
Arm
CMAr
Arm
CMAd
Leg
A
g
Le
rm
Dorsal
CgSv
Leg
Ventral
CMAv
Leg
Rostral
CgSd
SGm
SMA
pre-SMA
M1
Leg
Arm
Leg
Midline
M1
PMd
SPcS A r
ArSs
m
Medial
Leg
Leg
?
Lateral
Leg?
Arm
PS
us
nd
Fu
v
PM
Ar
m
M1
Arm
Leg
?
ArSi
CS
5 mm
FIGURE 1.4 Somatotopy of corticospinal projections. In this map, the location of the arm
representations in M1 and the premotor areas are based on the origin of neurons that project
to upper and lower cervical segments. The location of the leg representations in each cortical
area is based on the origin of neurons that project to lower lumbosacral segments. For
conventions and abbreviations see Figures 1.1 and 1.3. ArSi: arcuate sulcus, inferior limb;
ArSs: arcuate sulcus, superior limb. (Adapted with permission from Reference 84. Also
adapted with permission from Reference 85.)
areas lack a complete representation of the body (e.g., the PMd lacks a face area).
Indeed, complete maps of the body can only be defined for the SMA, CMAv, and
CMAr. On the other hand, the arm has the most widespread and robust representation
within each of the premotor areas. Overall, the major representations within each
premotor area originate from distinct, non-overlapping regions.
Copyright © 2005 CRC Press LLC