Nghiên cứu điều khiển hệ thống lái điện trên ô tô con
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.13 MB, 157 trang )
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
TRẦN VĂN LỢI
NGHIÊN CỨU ĐIỀU KHIỂN HỆ THỐNG LÁI
ĐIỆN TRÊN Ô TÔ CON
Chuyên ngành: KỸ THUẬT Ô TÔ – MÁY KÉO
Mã số:
62. 52. 01. 16
LUẬN ÁN TIẾN SĨ KỸ THUẬT
HÀ NỘI - 2017
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
TRẦN VĂN LỢI
NGHIÊN CỨU ĐIỀU KHIỂN HỆ THỐNG LÁI
ĐIỆN TRÊN Ô TÔ CON
Chuyên ngành: KỸ THUẬT Ô TÔ –MÁY KÉO
Mã số:
62. 52. 01. 16
LUẬN ÁN TIẾN SĨ KỸ THUẬT
CÁN BỘ HƯỚNG DẤN KHOA HỌC:
1- PGS. TS. Nguyễn Văn Bang
2- PGS. TS. Đỗ Văn Dũng
HÀ NỘI – 2017
TÀI LIỆU THAM KHẢO
I.
TÀI LIỆU TIẾNG VIỆT
1.
Nguyễn Tuấn Anh (2010), Điều khiển tối ưu hệ thống lái tích cực trên ô tô, Tạp
chí Giao thông Vận tải, số 04, tr. 42 - 44.
2.
Nguyễn V n
phát không
ng
nh (2014),
h o sát các ch
l m việc
c iệt c
ngu n k p trong hệ thống tur ine gi , Tạp chí
má
i u hi n v
T
ng h a, số 0, trang 48-54.
3.
Cao Trọng Hi n,
4.
Trần V n Lợi (2011), Nghiên cứu ch tạo mô hình mô phỏng hệ thống lái iều
khiển qu dâ dẫn,
5.
o Mạnh Hùng (2010), Lý thu t ô tô, NX Giao thông vận tải.
t i NCKH cấp trường Giao thông vận tải.
Trần V n Lợi (2013), Nghiên cứu ch tạo
hình lái gián ti p,
iều khiển tạo c m giác lái trên mô
t i cấp th nh phố Hồ Chí Minh.
6.
Nguyễn Khắc Trai (2006), Cơ sở thi t k ô tô, NX Giao thông vận tải.
7.
PGS.TS Nguyễn Khắc Trai (1997), Tính iều khiển v quỹ ạo chu ển
ng c
ô
tô, NX Giao thông vận tải.
II.
TÀI LIỆU TIẾNG ANH
8.
A. Emre Cetin, M. Arif Adli,
Duygun Erol Barkana, Haluk Kucuk (2009),
Compliant Control of Steer by Wire Systems, Kale Altınay Roboti
ve Otomasyon,
Istanbul, Turkey.
9.
Abolfazl Tahmasebi Inallu (2014), M ster’s Thesis in the S stems control nd
Mechatronics Department of Signals and Systems Division of Automatic control,
Automation and Mechatronics Mechatronics group Chalmers University Of Technology,
Göteborg, Sweden.
10.
Agoston L˝orincz (2004), Model reference control of a Steer–By–Wire system,
Department of Control Engineering and Information Technology, Budapest University of
Technology and Economics.
1
11.
Bogdan Thaddeus, Fijalkowski (2010), Automotive Mechatronics: Operational
and Practical Issues, Volume I, University of Technology Dept, Krakow Poland.
12.
Bryan Reimer, Bruce Mehler & Joseph F. Coughlin (2010), An Evaluation of
Driver Reactions to New Vehicle Parking Assist Technologies Developed to Reduce
Driver Stress, New England University Transportation Center Massachusetts Institute of
Technology.
13.
Ba-Hai Nguyen, Jee-Hwan Ryu, Semi-Experimental Results on a Measured
Current Based Method for Reproducing Realistic Steering Feel of
Steer-By-Wire
Systems, School of Mechanical Engineering, Korea University of Technology and
Education, Cheonan, Korea.
14.
C. Stiller and J. Ziegler (2012), Perception And Planning For Self-Driving And
Cooperative Automobiles, In 9th IEEE International Multi-Conference onSystems,
Signals and Devices (SSD), pp 1–7.
15.
Chuck H. Perala (2003), Effects Of Display Type And Steering Force Feedback
On Performance In A Medium-Fidelity Driving Simulator, Thesis submitted to the
faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of
the requirements for the degree of master of science in Industrial and Systems
Engineering, Blacksburg, Virginia.
16.
Carl-Johan Sjöstedt (2009), Modeling and Simulation of Physical Systems in a
Mechatronic Context, Doctoral Thesis Stockholm, Sweden.
17.
Di Martino Raffaele, G. L. Gissinger, G. Rizzo (2005), Modelling and Simulation
of the Dynamic Behaviour of the Automobile, the Faculty of Engineering, University of
Salerno.
18.
Deling Chen, Chengling Yin, Jianwu Zhang (2008), Controller Design Of A New
Active Front Steering System, Institute of Automotive Engineering, School of Mechanical
Engineering Shanghai Jiao Tong University, China ISSN: 1109-2777 Issue 1.
19.
Daniel Frede, Mohammad Khodabakhshian, Daniel Malmquis (2010), A State-Of-
The-Art Survey On Vehicular, Mechatronics Focusing On By-Wire Systems.
2
20.
D. van Raaij (2008), Application of bilateral control in Steer-by-Wire, Master's
thesis, Eindhoven University of Technology Department Mechanical Engineering,
Control Systems Technology Group, Eindhoven.
21.
Hairi Zamzuri, Saiful Amri Mazlan, and Muhammad Aizzat Zakaria (2012),
Modeling and Simulation of Vehicle Steer by Wire System, IEEE Symposium on
Humanities, Science and Engineering Research, Universti Teknology Malaysia, Kuala
Lumpur.
22.
Koehn, Eckrich (2004), the BMW approach towards modern steering technology,
SAE Technical.
23.
Kim, J-H Jang, S-N Yu, S-H Lee, C-S Han, and J-K Hedrick (2008), Development
Of A Control Algorithm For A Tie-Rod-Actuating Steer By Wire System, Department of
Mechatronics Engineering, Hanyang University, Ansan, Republic of Korea.
24.
Liu, A. Chang (1995), Force Feedback In A Stationary Driving Simulator,
Systems,
Man and Cybernetics Intelligent Systems for the 21st Century, IEEE
International Conference, Canada,vol. 2, pp.1711-1716.
25.
Manning, Selby, Crolla and Brown (2002), Intelligent Vehicle Motion Control,
SAE Technical Paper.
26.
M. Segawa (2000), A Study of Vehicle Stability Control by Steer-by-Wire System,
Proceedings of 5th International Symposium on Advanced Vehicle Control.
27.
M. Alessandro Dell’Amico (2013), Pressure Control in Hydraulic Power Steering
Systems, Division of Fluid and Mechatronic Systems, Department of Management and
Engineering, Linköping University, Linköping, Sweden, SE 581 83.
28.
M.Segawa, R.Hayama, S.Nakano (2003), A study on reactive Torque for Steer-By-
Wire System with Mechanical Fail-safe Device, Koyo Engineering Journal English
Edition, No.162E.
29.
Masao, Nagai, Motoki, Shino, Feng Gao (July 2002), Study On Integrated Control
Of Active Front Steer Angle And Direct Yaw Moment, Volume 23, Issue 3.
3
30.
Di Martino Raffaele (2005), Modelling and Simulation of the Dynamic Behaviour
of the Automobile, Thesis submitted to the Faculty of Engineering, University of Salerno
in partial fulfilment of the requirements for the degree of doctor in mechanical
engineering.
31.
Garrick J.Forkenbrock and W.Riley Garrott
(2011),
A Comprehensive
Experimental Evaluation of Test Maneuvers That May Induce On-Road, Untripped, Light
Vehicle Rollover, transportation research center, Washington DC.
32.
P. Yih and J. C. Gerdes (2005), Modification of vehicle handling characteristics
via Steer-by-Wire, IEEE, vol 13, no 6.
33.
Pacejka (2002), Tire and vehicle dynamics, SAE, Warrendale, PA.
34.
Paul Yih, Jihan Ryu, J.Christian Gerdes (2003), Vehicle handling modification via
Steer-By-Wire, Dynamic Design Lab, Stanford University.
35.
Robert H.Bishop (2007), Mechatronic Systems, Sensors, and Actuators:
Fundamentals and Modeling, The university of Texas at Austin, USA, pp 22.
36.
Robert H.Bishop (2007), Mechatronic Systems, Sensors, and Actuators:
Fundamentals and Modeling, The university of Texas at Austin, USA, pp 58.
37.
SAE International (2014), Surface Vehicle Information Report J3016: Taxonomy
and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving
Systems.
38.
S. Amberkar, F. Bolourchi, J. Dmerly, S. Millsap (2004), A Control System
Methodology for Steer by wire Systems, SAE Wolrd Congress, Steering and Suspension
Technology Symposium, Detroit, 2004.
39.
S. Wook (2003), The Development of an Advanced Control Method for the Steer-
by-Wire System to Improve the Vehicle Maneuvrability and Stability, Proceedings of
SAE International Congress and Exhibition.
40.
S.Wook (2003), The Development Of And Advanced Control Method For the
Steer-by-Wire System To Improve The Vehicle Maneuverability And Stability, SAE
International Congress and Exhibition.
4
41.
Se-WooK OH, Ho-Chol Chae, Seok-Chan YUN, Chang-Soo Han (2004), The
design of controller for the steer by wire system, JSME, Japan, vol 47.
42.
Thomas D. Gillespie (1992), Fundamental of Vehicle Dynamics, Society of
Automotive Engineers.
43.
Todd Litman Victoria (2014), Autonomous Vehicle Implementation Predictions
Implications for Transport Planning, Transport Policy Institute, Presented at the 2015
Transportation Research Board Annual Meeting, Traffic Technology International,.
44.
Toshihiro Hiraoka, Souhei Hioki and Hiromitsu Kumamoto (2013), Fundamental
Rese rch on Driver’s H ptic Ch r cteristics Concerning Steering Re ctive Torque
Department of Systems Science, Graduate School of Informatics, Kyoto University,
Kyoto, Japan.
45.
Xin Li Xue-Ping, Zhao Jie Chen (2009), Controller Design for Electric Power
Steering System Using T-S Fuzzy Model Approach, School of Mechanical Engineering,
Shanghai Jiao Tong University, Shanghai 200240, PRC.
46.
Yn D. Corolla (2009), Automotive Engineering, Powertrain, Chassis system and
Vehicle Body Automotive Engineering, Powertrain, Chassis system and Vehicle Body,
Oxford.
47.
Jaremy (2013), ISO-lane change, Anthony Best Dynamics, Holt Road, Brad ford
Avon, UK.
48.
Jing-Fu Liu, Tsung-Hsien Hu, Tsung-Hua Hsu (2014), Design of an Automotive
Lane Keeping System Based on the Structure of Electric Power Steering, Automotive
Research Testing Center, Changhua Taiwan Automotive Research Testing Center.
49.
Junjie He, BEng, Meng (2005), Integrated Vehicle Dynamics Control Using
Active Steering, Driveline and Brakin, The University of Leeds School of Mechanical
Engineering.
50.
Julien Coudon, Carlos Canudas-de-Wit, and Xavier Claeys, J. Coudon and Xavier
Claeys (2009), A New Reference Model for Steer By Wire Applications with Embedded
Vehicle Dynamics, Technocentre, 1 avenue du Golf, 78288 Guyancourt Cedex, France.
5
51.
Wang, Kong, Man, Tuan, Cao, Shen (2014), Sliding mode control for steer-by-
wire systems with AC motors in road vehicles, IEEE Transactions on Industrial
Electronics.
52.
S. Amberkar, F. Bolourchi, J. Dmerly, S. Millsap (2004), A Control System
Methodology for Steer By Wire Systems, 2004 SAE Wolrd Congress, Steering and
Suspension Technology Symposium, Detroit.
6
DANH MỤC CÔNG TRÌNH CỦA TÁC GIẢ
1.
Trần V n Lợi, Nghiên cứu chế tạo mô h nh hệ thống lái i u hi n qua dây dẫn,
t i NCKH cấp trường Giao thông vận tải, 20
2.
.
Trần V n Lợi, Nguyễn V n ang, Thí nghiệm i u hi n hệ thống lái hông trục lái
qua phần m m Labview, Tạp chí cơ hí Việt Nam số 04, 2012.
3.
Trần V n Lợi - Nghiên cứu chế tạo b
gián tiếp,
4.
i u hi n tạo cảm giác lái trên mô h nh lái
t i cấp th nh phố HCM 20 3.
Trần V n Lợi,
ỗ V n Dũng, Nguyễn V n ang, Nghiên cứu tạo cảm giác lái trên
mô h nh hệ thống Steer-By –Wire, Tạp chí hoa học giáo dục Trường
ại học Sư
phạm ỹ thuật TPHCM, 31/5/2015.
5.
Trần V n Lợi, Nguyễn V n ang, Trần V n Như, Mô phỏng chuy n l n của ô tô sử
dụng hệ thống lái Steer By Wire, Tạp chí Khoa học v Công nghệ, trường
ại học
công nghiệp H N i, 2015.
6.
Trần V n Lợi, Nguyễn V n
nh, Nguyễn V n
ang,
ỗ V n Dũng, Thiết ế b
i u hi n PID cho hệ thống lái STEER-BY-WIRE, H i nghị cơ iện tử to n quốc,
2016.
7.
Trần V n Lợi, Nguyễn V n
nh, Nguyễn V n
ang,
ỗ V n Dũng, Thiết ế b
i u hi n Fuzzy-PID cho hệ thống lái STEER-BY-WIRE, Tạp chí cơ hí Việt
Nam, 2016.
8.
Trần V n Lợi, Nghiên cứu thiết ế b
i u hi n hệ thống lái qua dây dẫn,
NCKH cấp trường Giao thông vận tải, 20 6.
7
t i
PHỤ LỤC
PHỤ LỤC I: THÔNG SỐ KỸ THUẬT XE CƠ SỞ
PHỤ LỤC II: NGUYÊN LÝ VÀ KẾT CẤU MÔ HÌNH
PHỤ LỤC III: CHƢƠNG TRÌNH MÔ PHỎNG MATLAB
PHỤ LỤC IV: CHƢƠNG TRÌNH LabVIEW
PHỤ LỤC V: THỬ NGHIỆM LỰA CHỌN KP VÀ TẠO CẢM GIÁC
8
PHỤ LỤC I: THÔNG SỐ KỸ THUẬT XE CƠ SỞ
1497
Hình 1: Bản vẽ tuyến hình ô tô Mercedes-Benz 200E
9
Bảng 1: Thông số kỹ thuật của ô tô cơ sở Mercedes-Benz 200E
Ký
Thông số
TT
hiệu
Giá trị
ơn vị
1
Khối lượng to n b xe
m
1810
kg
2
Chi u d i cơ sở
L
2,40
m
3
Khoảng các từ trọng tâm ến cầu trước
Lf
1.15
m
4
Khoảng các từ trọng tâm ến cầu sau
Lr
1.25
m
5
Vết bánh trước
Tf
1497
m
6
Vết bánh sau
Tr
1497
m
7
Chi u cao tọa
hg
0,58
m
8
Mô men quán tính của bánh xe
Jbx
0,78
kg.m2
9
Bán kính bánh xe
rbx
0,2682
m
ic
20
rvl
0.22
m
trọng tâm
10 Tỷ số truy n của cơ cấu lái
11
án ính vô l ng
12
cứng lốp trước
C2
12000
N/rad
11
cứng trục v nh lái
Cs
4120
N.m/rad
12
cứng trục lái
C0
4120
N.m/rad
rp
0.0072
m
C1
206000
N.m
Jz
1574
kg.m2
13
14
Khoảng cách tâm thanh r ng ến i m n hớp
bánh r ng
cứng thanh r ng
15 Mômen quán tính ô tô theo trục thẳng ứng
(nguồn: [44], [33])
10
PHỤ LỤC II: NGUYÊN LÝ VÀ KẾT CẤU MÔ HÌNH
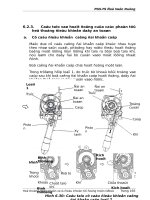
Hình 2: Kết cấu cơ cấu lái
11
Hình 3: Sơ đồ mạch điện mô hình thí nghiệm
12
b) Lớp dƣới
a) Lớp trên
Hình 4: Mạch in bộ phận ECU
Hình 5: Nguyên lý mạch điều khiển hệ thống lái điện
13
PHỤ LỤC III: CHƢƠNG TRÌNH MÔ PHỎNG MATLAB
Chƣơng trình matlab:
% Steer By Wire Simulation
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% clc
v = 60/3.6;
% toc do chuyen dong[m/s]
tsim =12;
% simulation time
i_st= 20;
% steering ratio
deltaV = 90;
% goc quay volang [do]
deltamax = (deltaV/i_st)*pi/180; % goc quay BXDH [rad]
delta_rate=0.3;% toc do thay doi goc quay vo lang [rad/s]
%
t_1=1.8;
t_2=2.54;
t_3=3.0;
%
t_4=3.0;
t_5=4.325;
t_6=5.37;
t_1=1.65;
t_2=2.4;
t_3=3.0;
t_4=3.0;
t_5=4.2;
t_6=5.25;
moto = 1810;
% khoi luong oto [kg]
Jz = 1574;
% momen quan tinh khoi luong oto theo phuong Cz[kgm2]
Lf = 1.15;
% khoang cach tu trong tam den truc truoc[m]
Lr = 1.20;
% khoang cach tu trong tam den truc sau[m]
L = Lf+Lr;
% chieu dai co so[m]
tf = 1.497;
% Vet banh truoc
tr = 1.497;
% Vet banh sau
Cf = 45000;
% do cung ben banh xe cau truoc [N/rad]
Cr = 45000;
% do cung ben banh xe cau sau [N/rad]
Lw = 0.4;
% vi tri tac dung cua luc gio ngang [m]
% ===================================================================
A=[-(Cf+Cr)/(m*v),
-1-(Lf*Cf-Lr*Cr)/(m*v^2);
-(Lf*Cf-Lr*Cr)/Jz,
-(Lf^2*Cf+Lr^2*Cr)/(Jz*v)];
Bw=[1/(m*v); Lw/Jz];
Bu=[Cf/(m*v); Cf*Lf/Jz];
B=[Bw, Bu];
C=[eye(2,2)];
D=[zeros(2,2)];
K0 = 0.225 %N.m/rad/s
C0 = 4120 % N.m/rad
J0 = 4.8*10^(-4) % Kg.m^2
i1 = 0.01;
i2 = 0.2;
mrack = 2 % kg
K1 = 450 % N.s/m)
C1= 206000;
Jbx = 1.8 % kg.m^2
K2 = 400 % N.m/rad/s
C2 = 45000; % N.m/rad
M = [J0 0 0; 0 m 0; 0 0 Jbx];
K = [-K0 K0/i1 0; K0/i1 -(K0/(i1^2) + K1) K1*i2; 0 K1*i2 -(K1*i2^2 + K2)];
C3 = [-C0 C0/i1 0; C0/i1 -(C0/(i1^2) + C1) C1*i2; 0 C1*i2 -(C1*i2^2 + C2)];
Jb = Jbx;c1 = 0;
%syms K0 C0 J0 i1 i2 m K1 C1 Jbx K2 C2 Jb
% a1 = -K0/J0; b1 = K0/(J0*i1); d1 = -C0/J0 ; e1 = C0/(J0*i1);
% a2 = K0/(m*i1) ; b2 = -K0/(m*i1^2)- K1/m; c2 = K1*i2/m; d2 = C0/(m*i1); e2
= -C0/(m*i1^2)- C1/m; f2 = C1*i2/m;
% b3 = K1*i2/Jb ; c3 = -K1*i2^2/Jb ; e3 = -C1*i2^2/Jb; d3 = C1*i2/Jb;
% a4 = e3 + c2*b3; b4 = f2*b3; c4 = b3*a2; d4 = d2*b3; e4 = b3*b2 + d3; f4 =
b3*e2;
% a5 = b4+ e4*c2 ; b5 = d4 + c4*a1 + e4*a2; c5 = e4*d2 + c4*d1; d5 = c4*e1 +
e4*e2; e5 = f4 + e4*b2 + c4*b1; f5 = e4*f2;
% K=1;
% b=c4/Jb;
14
% lambda =2;
% Thong so dong co
% ===================================================================
Pdm=15;
Udm=12;
ndm=7800;
Idm=2.28;
Lu=0.58;
Ru=1.17;
J=0.000016;
Km=0.011;
% tinh toan
E = Udm - Ru*Idm;
w = 2*pi*ndm/60;
Kphi=E/w;
Mt = Kphi*Idm;
Mc=0.001 % N.m
% Chieu rong toan bo xe
Bo=1.850;
At=1.1*Bo+0.25;
Bt=Bo+1;
% Longitudinal position of cones
xc1=[10:12/4:22];
xc2=[(22+13.5):11/4:(35.5+11)];
xc3=[(46.5+12.5):12/4:(59+12)];
xcones=[xc1,xc2,xc3];
% Lateral position of upper and lower cones
ycu1=[At/2*ones(1,length(xc1))];
ycu2=[(At/2+1+Bt)*ones(1,length(xc2))];
ycu3=[1.5*ones(1,length(xc3))];
ycl1=[-At/2*ones(1,length(xc1))];
ycl2=[(At/2+1)*ones(1,length(xc2))];
ycl3=[-1.5*ones(1,length(xc3))];
yc1 =[ycu1;ycl1];
yc2 =[ycu2;ycl2];
yc3 =[ycu3;ycl3];
ycones=[yc1,yc2,yc3];
%=========================================================
Hình 6: Chương trình simulink mô phỏng xe sử dụng hệ thống lái điện
Sử dụng hối Step trong công cụ Matlab Simulin l m tín hiệu ích thích trên vô
l ng. Sai số giữa tín hiệu c i ặt v tín hiệu áp ứng ược gửi tới b
i u hi n.
i u
hi n tạo tín hiệu i u hi n hệ iện tử, bỏ qua sai số của cảm biến v mạch i u hi n.
15
Khảo sát hi hệ thống l m việc trên ường trơn c hệ số bám thấp tương ứng với
cứng
lốp C2 = 12000 (N/rad) ( ường nh a phủ tuyết – Snow Asphalt). So sánh ết quả cho
thấy hả n ng áp ứng của hệ thống hi sử dụng b
i u hi n PID c sai số giảm dần từ
0.8-0 (rad) trong hoảng 0 giây mô phỏng, hi sử dụng b
i u hi n Fuzzy-PID hả
n ng áp ứng bám của hệ thống hi thay ổi cản hệ thống lái ược cải thiện, sai số giữa
tín hiệu mong muốn v tín hiệu áp ứng tương ối thấp từ 0, -0,2 (rad) sau hoảng 2
giây mô phỏng sai số bằng hông.
Hình 7: Đáp ứng hệ thống khi C2 = 12000 N/rad
So sánh kết quả hảo sát cho thấy hả n ng áp ứng của hệ thống hi sử dụng b
i u hi n Fuzzy PID cải thiện t nh trạng ảnh hưởng thay ổi cản hi xe chạy trên ường
C2 = 45000 (N/rad). Sai số giữa tín hiệu mong muốn v tín hiệu áp ứng hi mô men cản
t ng hi sử dụng b
i u hi n PID c xu hướng t ng theo (sai số ban ầu từ .2 (rad)
giảm v 0 trong hoảng 2.5 giây mô phỏng. Khi sử dụng b
i u hi n Fuzzy-PID sai
số giảm tương ối thấp từ 0.1-0.2 (rad) trong hoảng thời gian .8 giây.
Hình 8: Đáp ứng hệ thống khi C2 = 45000 N/rad
16
So sánh kết quả hảo sát cho thấy hả n ng áp ứng của hệ thống hi sử dụng b
i u hi n Fuzzy PID cải thiện t nh trạng ảnh hưởng thay ổi cản hi xe chạy trên ường
C2 = 80000 (N/rad). Sai số giữa tín hiệu mong muốn v tín hiệu áp ứng hi mô men cản
t ng hi sử dụng b
i u hi n PID c xu hướng t ng theo (sai số ban ầu từ .4 (rad)
giảm v 0 trong hoảng 3.5 giây mô phỏng. Khi sử dụng b
i u hi n Fuzzy-PID sai
số giảm tương ối thấp từ 0.1-0.3 (rad) trong hoảng thời gian 4 giây mô phỏng.
Hình 9: Đáp ứng hệ thống khi C2 = 80000 N/rad
Tổng hợp ết quả hảo sát hi sử dụng cho thấy hả n ng áp ứng của hệ thống hi
sử dụng b
i u hi n Fuzzy PID cải thiện t nh trạng ảnh hưởng thay ổi cản hệ thống
lái, sai số giữa tín hiệu mong muốn v tín hiệu áp ứng tương ối thấp từ 0.1-0.2 (rad)
ảnh hưởng rất ít bởi t nh trạng cản bánh xe v mặt ường.
Hình 10: Kết quả mô phỏng bộ điều khiển hệ thống lái điện
17
PHỤ LỤC IV: CHƢƠNG TRÌNH LabVIEW
Hình 11: Bộ điều khiển Fuzzy-PID trong môi trường LabVIEW
Hình 12: Chương trình điều khiển bám sử dụng bộ điều khiển Fuzzy-PID
Thử nghiệm o sai số giữa tín hiệu g c quay vô l ng v g c quay trục lái o trên mô
h nh thí nghiệm ở trạng thái bánh xe tiếp xúc với mâm xoay cố ịnh, sử dụng b
hi n PID.
18
i u
Hình 13: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
PID, Zl =420 kG, Zr = 420 kG
Hình 14: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
PID, Zl =400 kG, Zr = 450 kG
Hình 15: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
PID, Zl = 450 kG, Zr = 400 kG
19
Thử nghiệm o sai số giữa tín hiệu g c quay vô l ng v g c quay trục lái o trên mô
h nh thí nghiệm ở trạng thái bánh xe tiếp xúc với mâm xoay cố ịnh, sử dụng b
i u
hi n Fuzzy- PID.
Hình 16: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
Fuzzy-PID, Zl =420 kG, Zr = 420 kG
Hình 17: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
Fuzzy-PID, Zl =400 kG, Zr = 450 kG
Hình 18: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
Fuzzy-PID, Zl = 450 kG, Zr = 400 kG
20
Thử nghiệm o sai số giữa tín hiệu g c quay vô l ng v g c quay trục lái trên mô
h nh thí nghiệm ở trạng thái bánh xe tiếp xúc với mâm xoay cố ịnh.
Hình 19: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
PID, Zl = 420 kG, Zr = 420 kG
Hình 20: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái dùng bộ điều khiển
PID, Zl = 425 kG, Zr = 450 kG
Hình 21: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái PID,
Zl = 450 kG, Zr = 400 kG
21
Thử nghiệm o sai số giữa tín hiệu g c quay vô l ng v g c quay trục lái trên mô
h nh thí nghiệm ở trạng thái bánh xe tiếp xúc với mặt ường nh a.
Hình 22: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái Fuzzy-PID,
Zl = 420 kG, Zr = 420 kG
Hình 23: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái Fuzzy-PID,
Zl = 400 kG, Zr = 450 kG
Hình 24: Sai số giữa tín hiệu góc quay vô lăng và góc quay trục lái Fuzzy-PID,
Zl = 450 kG, Zr = 400 kG
22
PHỤ LỤC V: THỬ NGHIỆM LỰA CHỌN KP VÀ TẠO CẢM GIÁC
Thử nghiệm lựa chọn hệ số KP:
Khi chọn Kp = 0.8
Hình 25: Đáp ứng vành tay lái và trục cơ cấu lái khi hệ số đáp ứng Kp = 0.8, thời gian
chậm tác dụng 4s, sai số 400 xung
Ta c th thấy rõ
trắng) v
trễ giữa yêu cầu v tốc
v g c quay vòng ( ường m u
áp ứng ( ường m u ỏ).
Hình 26: Đáp ứng vành tay lái và trục cơ cấu lái khi hệ số đáp ứng KP =4, thời gian
chậm tác dụng 0,5s, sai số 50 xung
Hình 27: Đáp ứng vành tay lái và trục cơ cấu lái khi hệ số đáp ứng KP =10, thời gian
chậm tác dụng 0,05s, sai số 16 xung
23