Tiểu luận kỹ thuật định vị trong uWB
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (685.62 KB, 30 trang )
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
VIỆN ĐIỆN TỬ VIỄN THÔNG
TIỂU LUẬN
TRUYỀN THÔNG BĂNG SIÊU RỘNG
Giảng viên hướng dẫn: TS. ĐẶNG QUANG HIẾU
Học viên:
Chương I: ĐỊNH VỊ TRONG VÔ TUYẾN BĂNG SIÊU RỘNG
UWB
2.1 Giới thiệu
Việc ước tính khoảng cách (Ranging) và định vị trí (Positioning) có vai trò
rất quan trọng trong thiết kế các mạng truyền thông không dây. Công nghệ UWB
được xem là công nghệ duy nhất có khả năng định vị và xác định khoảng cách chính
xác trong mạng cảm biến không dây (WSN). Sự phổ biến của mạng cảm biến không
dây đã và đang diễn ra, bởi khả năng hỗ trợ của nó cho việc thông tin Máy tới Máy
với chi rất thấp. Sự phát triển của mạng cảm biến không đây WSN được coi là bản
sao của sự bùng nổ mạng WLAN trong những năm gần đây.
Để ước tính vị trí của một nút (được gọi là nút đích) trong mạng vô tuyến, thì
cần phải trao đổi các tín hiệu giữa nút đích và nhiều nút tham chiếu. Việc ước tính vị
trí có thể được thực hiện theo hai phương thức là: (i) phương thức trực tiếp từ tín
hiệu (được gọi là định vị trực tiếp); (ii) phương thức hai bước, trong đó trước hết
các tham số đặc trưng cho định vị trí được tách ra từ tín hiệu thu, sau đó thực hiện
ước tính vị trí dựa vào các tham số này. Mặc dù phương thức hai bước là cận tối ưu
nhưng ít phức tạp hơn phương thức trực tiếp. Hơn nữa, khi tỷ số tín hiệu trên tạp âm
SNR và/hoặc độ rộng băng tần của tín hiệu đủ lớn thì hiệu năng của hai phương
thức này gần như nhau. Do đó, phương thức thứ hai thường được chấp nhận ở hầu
hết các hệ thống thực tế. Vì vậy, chương này chỉ tập trung trình bày phương thức
thứ hai này. Muốn vậy, trước hết ước tính các tham số của tín hiệu thu liên quan đến
việc định vị như: cường độ điện trường của tín hiệu thu RSS; thời gian đến TOA;
hướng góc đến AOA, sau đó thực hiện ước tính vị trí dựa vào các tham số này.
2.2 Ước tính tham số và định vị
Thuật ngữ “khoảng cách: Ranging” và “định vị trí: Positing”, cũng như “định
vị nội bộ: Localization”, được dùng trong các tài liệu một cách rất linh hoạt; không
có nhận thức hay quy ước chung về ngữ nghĩa chính xác của các thuật ngữ này. Do
đó, ở đây xác lập một số định nghĩa sẽ được sử dụng như: khoảng cách, định vị nút
trung tâm, định vị tương đối, và định vị tuyệt đối hay định vị địa lý
Ước tính khoảng cách được xác định là việc tính toán khoảng cách từ nút
đích đến nút tham chiếu. Nút tham chiếu muốn có được thông tin về khoảng cách về
nút đích trong mạng bằng cách thiết lập một kết nối truyền thông ngang hàng (peerto-peer) tới nút đích. Liên kết này được sử dụng để ước lượng các giá trị của tham
số mà được dùng ở nút tham chiếu cho việc ước tính khoảng cách từ nó tới nút đích.
Các tham số này có được dựa trên việc ước lượng giá trị suy hao của kênh hoặc trễ
truyền sóng
y
y
N3
N2
POS(N 2 )
POS N2 (N 3 )
POS(N 3 )
N2
N3
N1
POS N2 (N1 )
POS(N1 )
N1
x
a)
x
b)
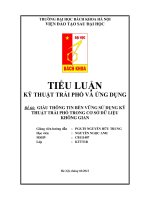
Hình 2. 1: a) Định vị theo nút trung tâm; b) Định vị tương đối
Định vị theo nút trung tâm được xác định là việc tính toán các vị trí của một
tập các nút đích đối với một nút tham chiếu. Định vị theo nút trung tâm cũng có
được dựa trên các kết nối ngang hàng, sao cho thông tin về góc và khoảng cách của
từng nút đích là khả đạt tại nút tham chiếu. Ta lưu ý rằng, mỗi nút đều có thể đóng
vai trò là một nút tham chiếu và tính toán vị trí của các nút khác theo hệ tham chiếu
riêng của nó. Hình 2.1a minh họa về phương pháp định vị theo nút trung tâm với hai
nút tham chiếu khác nhau. Trong đó, N2 là nút tham chiếu và các thông tin định vị
theo nút trung tâm tới các nút đích N1 và N3 được ký hiệu là POS N2 ( N1 ) và
POS N2 ( N3 )
Định vị tương đối được dùng để chỉ việc tính toán vị trí của một tập các nút
trong một hệ tọa độ chung. Điểm khác nhau với việc định vị theo nút trung tâm là
tất cả các nút chia sẻ cùng một hệ tham chiếu và mỗi nút chỉ liên kết với một tập các
tọa độ duy nhất. Việc chấp nhận chia sẻ chung một hệ trục tọa độ ở tất cả các nút
cần phải tổ chức tập các nút thành một mạng, cho phép trao đổi thông tin với nhau,
theo một số nguyên tắc được thiết lập bởi các thuật toán dành riêng cho việc lựa
chọn hệ trục tọa độ chung và việc biên dịch hệ trục tọa độ của từng nút. Hình 2.1b
minh họa về việc định vị tương đối, trong đó hệ tọa độ tham chiếu được trung tâm
tại N1.
Gốc của hệ trục tọa độ tham chiếu có thể được chọn bất kỳ và có thể không
trùng với vị trí của một nút trong mạng. Tuy nhiên, trong phần lớn các trường hợp,
hệ trục tọa độ tham chiếu được lấy từ hệ trục tọa độ của nút trung tâm. Ví như hình
2.1b, hệ trục tọa độ tham chiếu trùng với hệ trục tọa độ theo nút trung tâm của nút
N1 với POS(N1 ) (0,0) . Giao thức để lựa chọn hệ trục tọa độ tham chiếu sẽ được trình
bày ở phần sau.
Trường hợp đặc biệt về phương pháp định vị tương đối với việc chấp nhận hệ
trục tọa độ tham chiếu trùng với hệ trục tọa độ toàn cầu với các tọa độ được thể hiện
bởi vĩ độ và kinh độ. Giải pháp đặc biệt này được gọi là định vị tuyệt đối (hay định
vị địa lý) do các tọa độ được gắn với mỗi nút là duy nhất trên toàn cầu.
Cả hai phương pháp định vị theo nút trung tâm và định vị tương đối đều cần
có thủ tục ưu tiên để lấy lại các khoảng cách. Mức độ chính xác trong việc ước tính
khoảng cách ảnh hưởng đến tính chính xác của thành quả định vị. Kỹ thuật ước tính
khoảng cách phải được lựa chọn phù hợp với yêu cầu của lớp ứng dụng.
2.3 Phương pháp ước lượng tham số định vị
Việc xác định khoảng cách là việc ước tính khoảng cách d giữa máy phát và
máy thu. Nếu tín hiệu phát là s (t ) , thì tín hiệu thu tương ứng được cho bởi [9]:
r (t ) h(t ) s (t ) n(t)
(2.1)
trong đó h (t) là đáp ứng xung kim của kênh và n (t) là tạp âm nhiệt. Tại đây, luận
văn coi tín hiệu được truyền qua kênh lý tưởng có đáp ứng xung được cho bởi:
h(t ) a ( d ). t ( d )
(2.2)
Tín hiệu thu sẽ được viết lại là:
r (t ) a (d ).s t (d ) n(t)
(2.3)
Phương trình (2.3) cho thấy, khoảng cách d có thể được ước tính từ: suy hao
a (d) hoặc trễ (d) . Việc sử dụng a (d) hoặc (d) xác định phương pháp ước tính
khoảng cách dựa vào: cường độ trường của tín hiệu thu (RSS: Received Signal
Strength) hoặc thời gian đến (TOA: Time of Arrival) hay góc tới (AOA: Angle of
Arrival)
2.3.1 Phương pháp cường độ trường của tín hiệu thu RSS
Ý tưởng chính của phương pháp dựa vào cường độ trường tín hiệu thu là,
nếu biết trước mối quan hệ giữa suy hao công suất và khoảng cách thì cường độ
trường của tín hiệu thu RSS tại một nút có thể được dùng để ước tính khoảng cách
giữa nút này và nút phát, với điều kiện biết trước công suất phát (hình 2.2). Tuy
nhiên, do sự thiếu chính xác của việc đo xác định cường độ điện trường thu RSS (do
tính cách của môi trường truyền sóng) và việc định lượng mối liên hệ giữa khoảng
cách và giá trị suy hao (PL) nên sẽ gây ra sai số ước tính khoảng cách. Tín hiệu
UWB chịu ảnh hưởng bởi: pha đinh đa đường phạm vi hẹp, che chắn và suy hao
trong quá trình di chuyển từ nút này đến nút khác. Một cách lý tưởng, công suất tín
hiệu (hay cường độ điện trường của tín hiệu thu, RSS) được trung bình hóa trong
khoảng thời gian đủ lâu sẽ loại bỏ được ảnh hưởng của pha đinh đa đường và che
chắn, dẫn đến ta có thể biểu diễn công suất trung bình của tín hiệu thu theo phương
trình sau
Trong các hệ thống UWB, ảnh hưởng của đa đường có thể được giảm đáng
kể bằng cách lấy tổng công suất của tất cả các thành phần đa đường. Nói một cách
khác, nếu trong quá trình tính công suất trung bình mà thời gian tính tích phân T đủ
lâu (để chứa tất cả các thành phần đa đường có trong tín hiệu thu r(t)), thì giảm
được ảnh hưởng của pha đinh phạm vi hẹp, khi này công suất trung bình là:
Tuy nhiên, ảnh hưởng của che chắn thường có trong công suất của tín hiệu
thu P d , nó được mô hình hóa là biến ngẫu nhiên phân bố log-normal. Nói một
cách khác, công suất tín hiệu thu theo đơn vị dB được mô hình hóa là một biến ngẫu
nhiên phân bố Gausơ có trung bình là
được cho bởi (2.4) và phương sai là
sh2 , nghĩa là:
10lg P d ~ N P d ,sh2
(2.6)
Ta lưu ý rằng, mô hình này có thể được dùng trong môi trường truyền sóng
trực xạ LOS và môi trường truyền sóng không trực xạ NLOS khi ta chọn các tham
số của kênh một cách phù hợp.
d
N1
N1
d
N2
a)
b)
N2
Vùng bất
định
Hình 2. 2: Minh họa ước tính khoảng cách dựa vào RSS khi: a) không có sai số (chính
xác); b) có sai số, khoảng cách nhận được có độ bất định được biểu thị bởi vùng màu
xám
Từ mô hình công suất tín hiệu thu được cho bởi phương trình (2.6), ta có giới
hạn dưới Cramer-Rao (CRLB, Cramer–Rao lower bound) đối với ước tính khoảng
cách là
chệch và không chệch ở chương 1). Từ biểu thức (2.7) cho thấy, mức độ chính xác
về ước tính khoảng cách dựa vào cường độ trường của tín hiệu thu RSS phụ thuộc
vào bộ ba tham số sh ; n; d, cụ thể là: (i) giới hạn dưới tăng (tính chính xác của
ước tính khoảng cách giảm) khi độ lệch chuẩn của che chắn tăng, bởi vì khi này
mức độ thay đổi cường độ trường của tín hiệu thu RSS quanh công suất trung bình
của nó nhiều hơn; (ii) số mũ tổn hao công suất lớn thì mức độ chính xác của ước
tính chính xác hơn và công suất trung bình trở nên nhạy cảm với khoảng cách hơn
khi n lớn; (iii) mức độ chính xác về ước tính khoảng cách giảm khi khoảng cách
giữa các nút tăng lên. Hay nói cách khác, giới hạn dưới tăng tuyến tính (tỷ lệ thuận)
theo khoảng cách và độ lệch chuẩn của che chắn nhưng tỷ lệ nghịch với số mũ tổn
hao công suất. Nói cách khác, mức độ chính xác của kết quả ước tính khoảng cách
phụ thuộc vào các tham số đặc trưng của môi trường truyền sóng.
Nhược điểm: do sự thiếu chính xác của việc đo xác định cường độ điện
trường thu RSS (do tính cách của môi trường truyền sóng) và việc định lượng mối
liên hệ giữa khoảng cách và giá trị suy hao (PL) nên sẽ gây ra sai số ước tính
khoảng cách theo phương pháp cường độ trường tín hiệu thu RSS.
2.3.2. Phương pháp góc đến AOA
Phương pháp RSS cung cấp thông tin về khoảng cách giữa hai nút, phương
pháp AOA cung cấp thông tin về hướng của tín hiệu đến, hay góc giữa hai nút.
Thông thường dùng dàn anten để đo góc tới của tín hiệu. Ta có được thông
tin về góc của tín hiệu thu bằng cách đo sự khác nhau về thời điểm đến của tín hiệu
trên các phần tử của dàn anten. Hình 2.3minh họa ước tính AOA tại dàn anten, khi
khoảng cách giữa nút phát và nút thu là đủ lớn, thì tín hiệu đến có thể được mô hình
hóa như một mặt sóng phẳng. Kết quả là, thời điểm đến giữa các phần tử liền kề
trên dàn anten lệch nhau sin c giây, trong đó là khoảng cách giữa các phần tử
của dàn anten, là góc đến AOA, và c là vận tốc ánh sáng. Vì vậy, việc ước tính sự
khác nhau về thời điểm đến cho ta thông tin về góc
Hình 2. 3: Minh họa ước tính góc đến AOA: a) nút tham chiếu đo xác định góc ψ giữa nó
và nút đích; b) quan hệ giữa sự khác nhau về thời điểm đến và ψ tại dàn anten.
Với các tín hiệu băng hẹp, sự khác nhau về thời điểm đến có thể được biểu
diễn bằng sự dịch pha. Theo đó, sự kết hợp của các phiên bản dịch pha của các tín
hiệu thu tại các phần tử của dàn anten có thể được kiểm tra đối với các góc khác
nhau để ước tính hướng của tín hiệu đến. Tuy nhiên, với tín hiệu UWB (thời gian
của xung tín hiệu UWB rất nhỏ), ta phải xét các phiên bản trễ thời gian của tín hiệu
thu, bởi lẽ một giá trị trễ thời gian không chỉ được biểu diễn bởi giá trị pha duy
nhất.
Để có được giới hạn dưới theo lý thuyết về mức độ chính xác của phép đo
AOA, xem xét một chuỗi gồm Na phần tử anten. Ta ký hiệu ri t là tín hiệu thu tại
phần tử thứ i và được biểu diễn bởi:
ri t a.s t
i
ni t ,
i 1,...Na
(2.8)
trong đó: s t là tín hiệu phát; a là hệ số của kênh; i là trễ của tín hiệu khi đến
i ; và ni t là tạp âm Gausơ trắng cộng có trung bình không và
phần tử anten thứ
mật độ phổ N0 2 .
Trễ i có thể được biểu diễn như sau:
i d
c
trong đó: i
i
sin
c
(2.9)
Na 1 i , i 1,..., Na ; d là khoảng cách giữa máy phát và trung
2
tâm của dàn anten thu.
Khi các thành phần tạp âm tại các phần tử của dàn anten là độc lập, thì giới
(ta lưu ý rằng, ˆ là ước tính của ,
hạn dưới CRLB đối với ước tính góc
Varˆ là phương sai của ˆ ) được cho bởi:
6c 2 N0
Var ˆ
2
(2.10)
2
a .E. N a Na 1
2
cos2
trong đó E biểu trưng cho năng lượng của đạo hàm bậc nhất của tín hiệu phát s t ,
nghĩa là:
E s 't 2 dt
(2.11)
Áp dụng quan hệ Parseval ta được giá trị giới hạn dưới CRLB:
3c
Var ˆ
(2.12)
SN
2
2 R N a Na 1 cos
trong đó: SNR a2E N0
là tỷ số tín hiệu trên tạp âm của từng phần tử dàn anten; E
là năng lượng của tín hiệu phát s t ;
là độ rộng băng tần hiệu dụng của tín hiệu
s t được định nghĩa như sau:
1
E
f2
Sf
2
df
1 2
(2.13)
với S f là biến đổi Fourier của s t .
Từ biểu thức (2.12), ta thấy khi tăng SNR, tăng băng tần hiệu dụng, tăng
khoảng cách giữa các phần tử của dàn anten, tăng số phần tử anten đều nâng cao
(cải thiện) tính chính xác của ước tính góc đến AOA. Vì vậy, tín hiệu UWB có độ
rộng băng tần lớn sẽ dễ dàng có được kết quả đo chính xác về góc đến, đây cũng là
khả năng nổi trội của UWB trong việc định vị.
Ta lưu ý rằng, dàn anten loại tuyến tính đồng khoảng cách giữa các phần tử
của dàn anten (ULA) như trên hình 2.3 không thể phát hiện chính xác được các góc
tín hiệu đến là góc tù mà chỉ phát hiện chính xác đối với góc nhọn.
2.3.3 Phương pháp thời gian đến TOA
Ta cần nhớ lại rằng, kỹ thuật RSS dựa vào việc phát tín hiệu tại một mức
công suất tham chiếu, mức công suất này được biết ở phía thu. Máy thu đo đánh giá
công suất của tín hiệu thu và rút ra được khoảng cách từ suy hao công suất đo được.
Do quan hệ giữa suy hao và khoảng cách phụ thuộc vào tính cách của kênh truyền
sóng, nên cần có mô hình truyền sóng chính xác để việc ước tính khoảng cách được
tin cậy. Tính di động của thiết bị đầu cuối và sự thay đổi ngẫu nhiên về tính cách
của kênh thực sự là thách thức lớn. Sai số phát sinh đối với ước lượng RSS do hạn
chế về phần cứng của thiết bị. Đặc biệt là, máy phát phải phát xạ chính xác và ổn
định mức công suất tham chiếu. Sự khác biệt giữa công suất phát thực tế và công
suất tham chiếu phản ánh độ lệch có tính hệ thống. Tóm lại, ước tính khoảng cách
dựa vào RSS không phải là một phương pháp chính xác cao, và việc chấp nhận nó
được hạn chế cho các ứng dụng xác định khoảng cách một cách sơ bộ
Kỹ thuật ước tính TOA tính toán khoảng cách dựa vào ước tính toán trễ
truyền sóng giữa máy phát và máy thu. TOA là phương pháp ước tính khoảng cách
được dùng phổ biến nhất trong lĩnh vực Radar, và vì lý do này, thuật ngữ “TOA” và
“ranging” thường được hoán đổi cho nhau.
Kết quả ước tính thời điểm đến của tín hiệu TOA cho ta thông tin về khoảng
cách giữa hai nút bằng cách ước tính thời gian truyền tín hiệu từ một nút đến một
nút khác. Theo đó, việc ước tính thời điểm tín hiệu đến TOA tại một nút sẽ cung cấp
một vùng bất định được minh họa như hình 2.2b trong phương pháp ước tính
khoảng cách dựa vào RSS. Để tránh sự không rõ ràng (mức độ sai số) về ước tính
TOA, hai nút phải có một xung nhịp đồng hồ chung hoặc chúng phải trao đổi các
thông tin định thời với nhau thông qua giao thức cụ thể.
Kỹ thuật ước tính TOA kinh điển được thực hiện bởi bộ lọc thích hợp hay bộ
tương quan. Tín hiệu thu tại một nút được biểu diễn như sau:
r t a.s t n t
(2.14)
trong đó: biểu thị thời gian đến TOA; a là hệ số kênh; n t là tạp âm Gausơ trắng
có trung bình không và mật độ phổ N0 2 . Sau đó, bộ tương quan sẽ tìm kiếm giá trị
đỉnh của tương quan giữa r t và phiên bản dịch thời của tín hiệu s t ˆ
với trễ
ˆ khác nhau. Tương tự như trong sơ đồ dùng bộ lọc thích hợp, giá trị lớn
nhất tại đầu ra bộ lọc bằng với giá trị lớn nhất đầu ra bộ tương quan tại thời điểm
kết thúc của một chu kỳ ký hiệu mang tin (xem hình 2.4b). Các mô hình này là tối
ưu trong môi trường kênh AWGN đơn đường. Ta cần lưu ý tính chất đặc trưng của
kênh UWB so với kênh vô tuyến khác Tại đây, mục đích chính là xét mối quan hệ
giữa độ rộng băng tần của tín hiệu UWB với các giới hạn về lý thuyết của ước tính
thời điểm đến TOA.
Việc ước tính trễ là chủ đề then chốt trong truyền thông không dây vì nó
được yêu cầu để có được sự đồng bộ định thời ký hiệu giữa máy phát và máy thu
[3]. Một số giải pháp cho vấn đề này sẵn có trong các tài liệu. Hầu hết chúng đều
được rút ra từ bộ ước tính theo nguyên tắc khả năng giống nhất ML, được xác định
như sau
truyền sóng theo nguyên tắc ML được ký hiệu là ˆML , nghĩa là tồn tại một giá trị
ˆML làm giảm thiểu hàm khả năng giống ML. Vì vậy, ước tính ˆML được biểu diễn
như sau[3]:
ˆ ( r) arg min exp
ML
1
N
0T
r(t) s (t ) dt
2
obs
(2.15)
trong đó: N0 là mật độ phổ công suất hai phía của tạp âm; và Tobs là khoảng thời
gian quan trắc trong quá trình thực hiện ước tính trễ.
Sơ đồ đồng bộ phổ biến thực hiện xấp xỉ hóa ước tính trễ theo nguyên tắc
ML được gọi là bộ đồng bộ mở cổng sớm muộn. Để làm sáng tỏ hoạt động của bộ
s(t)
RS ( )
Mẫu tối ưu
Mẫu sớm
1
Mẫu muộn
T
0
t
a) Đầu vào bộ lọc thích hợp
0
T
TT
2T
b) Đầu ra bộ lọc thích hợp
Hình 2. 4: Xung chữ nhật s (t ) có độ rộng T và đầu ra Rs của bộ lọc thích hợp
Ta lưu ý rằng, RS () biểu trưng cho tín hiệu đầu ra của máy thu tương quan.
Vì vậy, ta có được giá trị đỉnh bằng cách lấy mẫu tín hiệu RS () tại T (xem hình
2.4b).
Bộ đồng bộ cổng sớm-muộn khai thác tính đối xứng của tín hiệu tại đầu ra
bộ tương quan RS () , nghĩa là, RS (T ) RS (T ) . Bộ đồng bộ trích ra 2 giá trị
từ RS () tại các vị trí đối xứng qua giá trị đỉnh kỳ vọng T bằng cách lấy mẫu đầu
ra của bộ tích phân của máy thu tương quan tại T và T . Sau đó, bộ
R
đồng bộ ước lượng đại lượng dưới đây:
R Rs T Rs T
Khi đạt được đồng bộ hoàn hảo, thì hai giá trị RS (T ) và
bằng nhau, nghĩa là
R = 0
(2.16)
RS (T
) là
. Ngược lại, khi trễ không được biết trước xuất hiện
trong tín hiệu thu, thì bộ đồng bộ trích ra hai giá trị không bằng nhau và
R 0
. Ảnh
hưởng này được biểu diễn trong hình 2.5.
Trong trường hợp đồng bộ không hoàn hảo, bộ đồng bộ đưa vào một trễ bổ
sung và tính toán lại giá trị của R . Sau đó điều chỉnh giá trị của trễ bổ sung đến khi
R = 0 bằng cách sử dụng vòng lặp điều khiển kín làm thay đổi giá trị của trễ bổ
sung dựa trên đầu ra của biểu thức (2.16). Trễ bổ sung cuối cùng biểu trưng cho ước
tính trễ ngẫu nhiên mong muốn.
40
RS
1
R
T
2T
Hình 2. 5: Ảnh hưởng của trễ không được biết trước lên đầu ra của
bộ đồng bộ mở cổng sớm muộn (early-late gate synchronizer ) R
Lưu ý rằng, khi sơ đồ trên được sử dụng cho các mục đích đồng bộ, nó bù trễ
bất kỳ giữa tín hiệu thu và tín hiệu tham chiếu. Các nguyên nhân gây trễ bao gồm
trễ truyền sóng và sự mất đồng chỉnh giữa xung nhịp đồng hồ của máy phat và xung
nhịp đồng hồ của máy thu. Khi áp dụng sơ đồ này vào việc xác định khoảng cách
(ranging), điều cốt yếu là phải đạt được định thời tham chiếu chung giữa máy phát
và máy thu, để tách biệt (cô lập) trễ do truyền sóng. Trong các ứng dụng radar, tham
chiếu định thời chung vốn đã được cấp bởi thực tế là máy phát và máy thu cùng
được định vị vật lý, vì việc ước lượng cự ly đến mục tiêu dựa trên tín hiệu phản hồi.
Ngược lại, để bắt được cự ly (khoảng cách) giữa các thiết bị truyền thông khác
nhau, cần phải có một giao thức bắt tay đo xác định cự ly giữa máy phát và máy thu
nhằm đạt được sự đồng bộ trong điều kiện ràng buộc về mức độ chính xác cụ thể.
Chủ đề này được diễn đạt đối với trường hợp hệ thống UWB trong (Fleming and
Kushner, 1997), ở đó đề xuất một số sơ đồ để đạt được tham chiếu định thời chung
giữa hai thiết bị UWB, được biểu diễn trong hình 2.6cho trường hợp đã chọn.
Trong hình 2.6 nút tham chiếu N1 gửi một gói tin tại thời điểm t0. Nút đích
N2 nhận gói tin tại thời điểm t0 + và cộng tác với nhau trong quá trình đo xác định
cự ly bằng cách phản hồi chính gói tín đó tại thời điểm t0 + + , với là trễ thời
gian cố định. đủ lớn để chứa đựng các trễ do xử lý tín hiệu tại nút đích (trễ do xử
lý tín hiệu), và trễ này được biết tại cả máy phát và máy thu. Nút tham
chiếu N1 nhận gói tin phản hồi tại thời điểm t1 = t0
+ + + , và suy ra được trễ
truyền sóng như sau:
t1 t 0
2
(2.17)
Ta lưu ý rằng, quá trình này cung cấp việc đo xác định cự ly chỉ đối với N1mà
không phải là N2. Hoặc là gói tin đo cự ly bổ sung từ N1đến N2 hoặc là truyền thông
tường minh về khoảng cách đo được bởi N1 cần phải cung cấp cho N2 bằng đo ước
lượng cự ly.
t0
t0
N1
N2
t0
t0
time
time
Hình 2. 6: Quá trình trao đổi bắt tay đo cự ly đối với các thiết bị định
vị UWB (được đề xuất trong bởi Fleming and Kushner, 1997).
Flening và Kushner [1997] chỉ ra rằng, kỹ thuật TOA đặc biệt phù hợp với vô
tuyến UWB, nhờ băng thông siêu rộng. Độ chính xác của ước tính TOA được biểu
diễn bởi phương sai của sai số ước tính TOA, 2 , thực tế nó liên quan đến độ rộng
băng tần của tín hiệu và SNR tại máy thu. Theo lý thuyết tổng quát về bộ ước tính
ML, giới hạn dưới đối với 2trong môi trường kênh AWGN được cho bởi giới hạn
dưới Cramer-Rao, CRLB.
2ˆ =
2
N0
(2 f )
2
(2.18)
S ( f ) df
Ý nghĩa của giới hạn này và giá trị nó giả thiết trong trường hợp tín hiệu
UWB
Cũng vậy, với mô hình tín hiệu như ở biểu thức (2.14), giới hạn CRLB (2.18)
được viết lại là:
1
Var ˆ 2 2 SNR
(2.19a
trong đó: ˆ là ước tính thời gian đến; SNR = a2 E N0 là tỷ số tín hiệu trên tạp âm;
E là năng lượng của tín hiệu; là độ rộng băng tần tín hiệu hiệu dụng của tín hiệu
được định nghĩa bởi (2.13).
Ta lưu ý rằng, khác với ước tính cường độ trường của tín hiệu thu RSS, mức
độ chính xác của ước tính thời điểm đến của tín hiệu TOA được cải thiện bằng cách
tăng SNR và/hoặc độ rộng băng tần hiệu dụng của tín hiệu. Vì tín hiệu UWB có
băng tần rất rộng nên thuộc tính này cho phép ước tính khoảng cách có độ chính xác
cao khi dùng ước tính TOA.
2.3.4. Phương pháp vi sai thời gian đến TDOA
Theo quy ước, phương pháp ước tính khoảng cách dựa trên TOA cần có sự
đồng bộ giữa nút đích và các nút tham chiếu. Tuy nhiên, phương pháp dựa vào
TDOA không cần phải đồng bộ giữa nút tham chiếu và nút đích, mà chỉ cần có sự
đồng bộ giữa các nút tham chiếu với nhau. Trong trường hợp này, sự sai khác về
thời điểm đến của tín hiệu giữa nút đích và nút tham chiếu được ước tính. Điều này
sẽ định vị nút đích trên một hình hyperbol với tiêu điểm là vị trí của hai nút tham
chiếu như hình 2.7a
x, y
d
x1 , y1
d2
a)
d1
b)
b) Ước lượng TDOA xác định đường hyperbol b) Minh họa ước lượng lai ghép
TOA/AOA
mà nút đích đi thông qua có tiêu cự tại các
nút tham chiếu
Hình 2. 7: a) Ước lượng TDOA xác định đường hyperbol mà nút đích đi thông qua có
tiêu cự tại các nút tham chiếu; b) Minh họa ước lượng lai ghép TOA/AOA
Cách để có được ước tính TDOA là thực hiện ước tính TOA tại mỗi nút tham
chiếu và tính toán sự sai khác giữa hai ước tính này. Cụ thể là, nếu các tín hiệu thu
được cho bởi r1(t) và r2(t) như trong phương trình (2.14), thì 1 được ước tính từ
r1(t) và 2 được ước tính từ r2(t). Do nút đích và các nút tham chiếu không được
đồng bộ, nên ước tính TOA tại các nút tham chiếu sẽ chứa thêm một khoảng thời
gian dịch thời. Cũng do các nút tham chiếu được đồng bộ với nhau nên khoảng thời
gian dịch thời này là như nhau tại các nút tham chiếu. Vì vậy, vi sai thời điểm đến sẽ
là:
ˆ
TDOA
ˆ
ˆ
= 1 2
(2.20)
trong đó: ˆ1 là ước tính TOA của 1 tại nút tham chiếu thứ nhất; và ˆ2 là ước tính
TOA của 2 tại nút tham chiếu thứ hai. Như đã xét ở trên, mức độ chính xác của ước
tính TOA tăng tỷ lệ thuận với độ rộng băng tần và SNR. Kết luận này cũng đúng
trong trường hợp của ước tính TDOA.
Cách khác để có được ước tính TDOA là thực hiện tính tương quan chéo tín
hiệu r ( t) với tín hiệu
1
r ( t) , và tính toán trễ tại giá trị của tương quan chéo lớn
2
nhất. Hàm tương quan chéo được biểu diễn như sau:
( ) = T1 T r (t )r (t )dt
1,2
trong đó
cho bởi:
T
0
1
2
(2.21)
là khoảng thời gian quan sát và ước tính vi sai thời gian đến TDOA được
ˆTDOA arg max 1,2
(2.22)
Mặc dù ước tính TDOA dựa vào tương quan chéo theo (2.22) là hoạt động tốt
đối với các mô hình kênh tạp âm trắng và đơn đường (đặc trưng bởi phương trình
(2.14)), hiệu năng của nó bị suy giảm đáng kể trong môi trường kênh đa đường
và/hoặc tạp âm màu. Để cải thiện hiệu năng của sơ đồ tương quan chéo, luận văn sử
dụng kỹ thuật tương quan chéo tổng quát (GCC). Trong ước tính TDOA dựa vào
GCC, thực hiện tương quan chéo các phiên bản của tín hiệu thu sau khi được lọc,
tương ứng với định dạng mật độ phổ công suất chéo PSD-chéo của các tín hiệu. Tồn
tại một số hàm định dạng để cải thiện hiệu năng.
2.3.5. Một số phương pháp kết hợp điển hình
Thay vì thực hiện một phương pháp đơn lẻ như RSS hoặc TOA, một nút có
thể ước tính được một tập các thông số liên quan đến vị trí. Sơ đồ kết hợp lai ghép
(hybrid) cho ta nhiều thông tin về vị trí của nút đích. Các kết hợp như TOA/AOA,
TOA/RSS, TDOA/AOA tùy vào yêu cầu về mức độ chính xác và ràng buộc về mức
độ phức tạp. Chẳng hạn, sơ đồ lai ghép TOA/AOA cho phép ta ước tính cả khoảng
cách và hướng góc đến AOA, cho ta một ước tính về vị trí duy nhất của nút đích (là
giao điểm của một đường thẳng và một đường tròn hình 2.7b)
Một kiểu ước tính khác bao gồm ước tính lý lịch trễ công suất đa đường PDP
hoặc đáp ứng xung kim CIR tương ứng với tín hiệu thu. So với các tham số liên
quan như góc và khoảng cách được trình bày ở trên, thì PDP và CIR có thể chứa
nhiều thông tin về vị trí của nút đích hơn. Tuy nhiên để trích ra thông tin liên quan
về vị trí từ các kết quả ước tính này, cần có hàm hồi quy/ánh xạ, thường có trong cơ
sở dữ liệu (database) chứa các số liệu đo về PDP (hoặc CIR). Vì vậy, thuật toán
thường tận dụng số liệu đo về PDP hoặc CIR để thực hiện giai đoạn luyện (train)
nhằm có được hàm ánh xạ từ cơ sở dữ liệu trước khi bắt đầu thực hiện ước tính vị trí
thực tế.
Tương tự như phương pháp PDP, ước tính lý lịch công suất góc đa đường
được tận dụng tại các nút có dàn anten. Lưu ý rằng các lý lịch công suất góc và lý
lịch công suất trễ PDP (hoặc CIR) đều làm tăng tính phức tạp của giai đoạn ước tính
tham số liên quan đến vị trí so với các phương pháp RSS, AOA và TOA kinh điển,
vì cần phải ước tính rất nhiều tham số liên quan. Tuy nhiên, các kết quả đo này cũng
có thể dễ dàng ước tính vị trí chính xác trong các môi trường đặc thù có tính thách
thức.
2.4. Phương pháp định vị trí
Kỹ thuật ước tính vị trí có thể được chia thành hai nhóm tùy vào sự hiện hữu
của cơ sở dữ liệu chứa các số liệu đo tại một vị trí cụ thể. Kỹ thuật dùng cơ sở dữ
liệu thường đạt được bởi giai đoạn luyện (training), giai đoạn không trực tuyến
trước khi bắt đầu định vị thời gian thực, được gọi là kỹ thuật ánh xạ. Các kỹ thuật
khác không tận dụng cơ sở dữ liệu thường dùng kỹ thuật hình học hoặc thống kê để
ước tính vị trí chỉ dùng các ước tính tham số từ bước thứ nhất. Như đã trình lọc ở
phần mở đầu của chương, luận văn chỉ tập chung xét phương thức hai bước. Dưới
đây luận văn trình lọc giai đoạn hai (bước hai) của phương thức này
Sau khi ước tính tập các tham số liên quan đến định vị từ tín hiệu thu bởi các
kỹ thuật được xét ở trên. Bước tiếp theo là ước tính vị trí từ tập các tham số này.
Phương pháp ước lượng định khoảng cách cung cấp một ước tính khoảng
cách giữa các cặp hai nút trong một mạng. Mỗi nút đích Ni đều biết khoảng cách của
nó đến tất cả các nút khác. Trong số các nút này, đích Ni có thể chọn tham chiếu (
N i ,... Nk ) để tạo thành một hệ tham chiếu, trong đó nó tiến hành ước tính vị trí của
nó, và được mô tả dưới đây.
2.4.1 Định vị trí cầu
Trong trường hợp lý tưởng, ước tính khoảng cách không sai số, kỹ thuật định
vị trí cầu hay định vị trí dựa vào TOA là một giải pháp khả dụng. Ở đây, dựa vào
việc quan sát chúng trong không gian 3 chiều ( x , y , z) , mỗi khoảng cách
(N )
RANG
N
kính d
j
giữa nút đích N và nút tham chiếu N
i
i
j
(N ) tâm là N , vị trí của nút đích N là ( x , y , z ) = POS (N
= RANG
ji
xác định một hình cầu bán
Nj
i
j
được xác định bởi điểm giao nhau của
i
iii
)
i
k hình cầu bán kính ( d1i ,..., dki ) có tâm tại
các nút tham chiếu (N i ,...Nk ) . Do cần có giao điểm của 4 hình cầu để xác định một
điểm trong không gian ba chiều, nên cần có ít nhất 4 nút tham chiếu trong quá trình
định vị không gian ba chiều Chú ý rằng, không cần thiết đưa thêm các nút tham
chiếu để tính toán vị trí khi việc ước tính khoảng cách là hoàn hảo, nhưng lại làm rõ
việc cải thiện hiệu năng trong trường hợp không hoàn hảo mà luận văn sẽ phân tích
sau đây. Giao điểm của k mặt cầu có thể tính được bằng cách giải hệ phương
trình sau:
Cách làm tương tự cho không gian hai chiều ( x , y) , hay một mặt phẳng.
Trong trường hợp này, vị trí của nút Ni là (xi , yi ) = POS (Ni ) được xác định bởi
giao điểm của ba đường tròn và được tính bằng cách giải hệ phương trình:
Hình 2. 8: Minh họa về định vị trí cầu của nút Ni trong không gian hai chiều với N1,
N2, N3 là các nút tham chiếu
Định vị trí cầu được sử dụng chỉ khi tham chiếu định thời chung là khả dụng
đối với nút đích Ni và tất cả các nút tham chiếu, nghĩa là, ta có thể đạt được ước tính
khoảng cách lý tưởng. Đáng tiếc, đây không phải là trường hợp trong nhiều tình
huống thực tế, trong đó sự mất đồng chỉnh và trôi thời gian xung nhịp đồng hồ gây
ra trễ ngẫu nhiên trong các xung nhịp đồng hồ tại mỗi nút. Việc tính toán chính xác
vị trí vẫn có thể đạt được khi thời điểm tham chiếu chung khả dụng giữa ít nhất k
nút tham chiếu.
2.4.2. Định vị trí hyperbolic
Kỹ thuật định vị trí hyperbolic, còn được coi là kỹ thuật vi sai thời gian đến
TDOA (Time Different Of Arrval), xác định vị trí của nút đích Ni dựa vào sự khác
nhau giữa các thời điểm đến từ k nút tham chiếu và nút đích Ni . Ta giả sử rằng,
k điểm tham chiếu cùng chia sẻ một tham chiếu định thời chung và xung nhịp đồng
hồ tại nút Ni bị trễ một khoảng thời gian so với tham chiếu định thời chung. Vấn
đề then chốt ở đây là, hiệu số giữa các thời điểm đến của các nút tham chiếu khác
nhau loại bỏ được trễ . Điều này được thấy rõ khi ta quan sát tại các cặp đầu cuối
tham chiếu ( N n , Nn1 ) :
d d
ni
( n 1) i
c ni c ( n 1)i
c ni ( n 1)i
(2.25)
Tiếp đó, vị trí của nút đích Ni trong không gian ba chiều được xác định là
giao điểm của các hyperboloid trong không gian, được mô tả bởi các biểu thức sau:
Hình 2.9 minh họa về việc định vị hyperbolic trong không gian hai chiều.
y
N2
N3
N1
Ni
x
Hình 2. 9: Minh họa về định vị hyperbolic của nút Ni trong không gian hai chiều với
các nút tham chiếu N1, N2 và N3
Việc định vị trí hyperbolic yêu cầu có tham chiếu định thời chung chính xác
giữa các nút tham chiếu, nhưng lại không cần phản hồi đồng bộ chính xác giữa các
nút tham chiếu và nút đích. Đặc biệt là, nó được dành riêng cho các mạng hạ tầng
cơ sở, trong đó dễ dàng có được và duy trì việc phối hợp giữa các nút hạ tầng. Với
lý do này, kỹ thuật định vị Hyperbolic được khuyến nghị cho mục đích định vị trong
các mạng tế bào, ở đó các trạm gốc đóng vai trò là các nút tham chiếu và cho phép
các nút di động nhận được vị trí của chính nó.
Các kỹ thuật định vị cầu và hyperbolic yêu cầu thông tin khoảng cách không
bị sai số để cung cấp cho giải pháp. Tuy nhiên, như sẽ được sáng tỏ ở chương 3 khi
thực hiện tính toán và mô phỏng, tạp âm nhiệt sẽ gây ra sai số ước tính khoảng cách,
dẫn đến kết quả ước tính khoảng cách giữa các nút không còn lý tưởng nữa. Trong
trường hợp này, không tồn tại nghiệm của các hệ phương trình (2.23) và (2.26) như
được minh họa ở hình 2.10.
Hình 2. 10: Minh họa ảnh hưởng của sai số đo khoảng cách lên định vị cầu của nút Ni
trong không gian hai chiều với các nút tham chiếu N1, N2, N3
CHƯƠNG 2: PHÂN TÍCH, MÔ PHỎNG, ĐÁNH GIÁ HIỆU
NĂNG MỘT SỐ PHƯƠNG PHÁP ĐỊNH VỊ ĐIỂN HÌNH
TRONG VÔ TUYẾN BĂNG SIÊU RỘNG UWB
3.1 Giới thiệu
Trên cơ sở các phương pháp định vị được nghiên cứu và trình bày ở chương
2 như: Ước lượng tham số và định vị trí; Ước lượng tham số định vị dựa vào cường
độ trường tín hiệu thu RSS, góc đến AOA, thời gian đến TOA, vi sai thời gian đến
TDOA, kỹ thuật định vị trí hình cầu; Định vị trí hình hyperbolic, Ước tính vị trí theo
thuật toán LSE.Chương này, thực hiện mô hình hóa và Matlab hóa nhằm làm sáng
tỏ tính ưu việt về độ chính xác trong việc định vị của hệ thống UWB trên cơ sở các
kết quả tính toán và kết quả mô phỏng.
Cụ thể, chương này thực hiện: Mô hình và kịch bản mô phỏng; xem xét sai
số, các nhân tố ảnh hưởng tính chính xác trong định vị; Phân tích, mô phỏng, đánh
giá hiệu năng một số phương pháp định vị điển hình; Tính toán, mô phỏng và biểu
diễn tính chính xác của việc ước tính khoảng cách; Tính toán, mô phỏng và biểu
diễn tính chính xác của việc ước tính góc đến AOA; Tính toán và biểu diễn tính
chính xác của việc ước tính thời điểm đến TOA; Giải pháp điển hình để cải thiện
tính chính xác của định vị.
3.2. Mô hình và kịch bản mô phỏng
Mô hình mô phỏng cho việc định vị trong hệ thống truyền thông UWB được
cho ở hình 3.1. Trong đó, tạo tín hiệu ở phía phát, cũng như thu xử tín hiệu ở phía
thu đảm bảo các tham số đặc trưng của tín hiệu và hệ thống UWB, cụ thể như: tín
hiệu UWB nhảy thời gian TH-UWB, tín hiệu UWB chuỗi trực tiếp DS-UWB, tín
hiệu UWB đa băng tần MB-UWB, trong đó, với TH-UWB và DS-UWB được thực
hiện bằng các nguyên lý điều chế PPM hoặc PAM.
Cụ thể, theo định nghĩa băng siêu rộng UWB của FCC 2002 [d], một tín hiệu
được coi là tín hiệu băng siêu rộng UWB nếu độ rộng băng tần của nó lớn hơn 500
60
MHz trên toàn bộ băng tần 7,5 GHz trong dải tần từ 3,1 GHz đến 10,6 GHz. Với
MB-UWB, nó được chia thành nhiều băng tần nhỏ, mỗi băng có độ rộng ít nhất là
500 MHz. Dữ liệu của người sử dụng được truyền trên các băng con trong các chu
kỳ thời gian, vì vậy cho hệ thống có thể tránh được nhiễu mà không cần phải dùng
các bộ lọc cao tần. Nhiều loại điều chế được chấp nhận để điều chế dữ liệu trong
mỗi băng con. Theo phân tích của nhóm công tác IEEE 802.15.TG3a, mô hình điều
chế được sử dụng là OFDM.
Máy phát UWB
Máy thu UWB
Thu và xử
lý tín hiệu
UWB
Tạo tín hiệu
UWB
Giải pháp ước tính
và định vị
Kênh UWB: Các tham số kênh đặc trưng
cho môi trường truyền thông vô tuyến
băng siêu rộng
Hình 3. 1: Mô hình mô phỏng định vị trong truyền thông vô tuyến băng siêu rộng
UWB
Tham số mô phỏng/Kịch bản mô phỏng
Với mục từng đích: (i)Tính toán, mô phỏng và biểu diễn tính chính xác của
việc ước tính khoảng cách; (ii)Tính toán, mô phỏng và biểu diễn tính chính xác của
việc ước tính góc đến AOA; (iii)Tính toán và biểu diễn tính chính xác của việc ước
tính thời điểm đến TOA; (iv)Giải pháp điển hình để cải thiện tính chính xác của
định vị. Các tham số và kịch bản mô phỏng, sai số cũng như các nhân tố ảnh hưởng
tính chính xác trong định vị được trình bày cụ thể trong phần 3.3 và 3.4 dưới đây.
Chương trình mô phỏng trên Matlab được giới thiệu chi tiết ở Phụ lục.