Tính toán tổng thể kết cấu giàn khoan tự nâng 400 ft trong trạng thái di chuyển
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.04 MB, 12 trang )
Tạp chí Khoa học Công nghệ Xây dựng NUCE 2018. 12 (6): 8–19
TÍNH TOÁN TỔNG THỂ KẾT CẤU GIÀN KHOAN TỰ NÂNG 400 FT
TRONG TRẠNG THÁI DI CHUYỂN
Đinh Quang Cườnga,∗, Vũ Đan Chỉnha , Hoàng Tiến Dũnga
a
Viện Xây dựng Công trình biển, Trường Đại học Xây dựng,
55 đường Giải Phóng, quận Hai Bà Trưng, Hà Nội, Việt Nam
Nhận ngày 20/12/2017, Sửa xong 09/01/2018, Chấp nhận đăng 28/09/2018
Tóm tắt
Công trình biển tự nâng (jackup) trong trạng thái di chuyển là một dạng công trình biển nổi, kích thước lớn.
Các tiêu chuẩn hiện nay mới chỉ quy định tính toán với các mô hình tương đương theo phương pháp phần tử hữu
hạn mà chưa xét đến sự làm việc đồng thời của các kết cấu như trong mô hình tổng thể. Mặt khác tải trọng sóng
tác dụng lên công trình biển tự nâng kích thước lớn trong trạng thái di chuyển bao gồm tải trọng sóng nhiễu xạ,
bức xạ và thường được xác định bằng phương pháp phần tử biên. Bài báo này trình bày thuật toán tổng quát kết
hợp phương pháp phần tử biên và phương pháp phần tử hữu hạn để tính toán tổng thể công trình biển tự nâng
trong trạng thái di chuyển và áp dụng cụ thể cho một công trình biển tự nâng đang xây dựng trong điều kiện
biển Việt Nam.
Từ khoá: giàn khoan tự nâng 400 ft; trạng thái di chuyển; tính toán tổng thể.
GLOBAL ANALYSIS OF JACK-UP 400 FT IN TRANSIT CONDITION
Abstract
In transit condition, Jack-up Rig is a type of floating marine structure with large dimensions. The current
standards have just regulated calculating in the equivalent models according to the Finite Element Method
(FEM), without consideration of structure’s simultaneous work as in the overall model. Wave loads that include
diffracted, radiated wave loads acting on large-sized Jack-up Rig in the transit condition are usually determined
by the Boundary Element Method (BEM). This article indicates general algorithm combining FEM and BEM
so as to compute overall Jack-up Rig in the transit condition and apply specifically for a Jack-up Rig be erecting
in Vietnamese sea condition.
Keywords: overall jack-up rig 400 ft; transit condition; global analysis.
c 2018 Trường Đại học Xây dựng (NUCE)
1. Giới thiệu
Giàn khoan tự nâng 400 ft (Hình 1) có khối lượng kết cấu và thiết bị khoảng 18.000 tấn và có khả
năng chất tải lên tới 2.995 tấn để phục vụ công tác khoan thăm dò và phục vụ các hoạt động của giàn
trên biển. Một số thông số chính của giàn khoan tự nâng 400 ft như sau:
Giàn khoan tự nâng 400 ft có khả năng hoạt động trong vùng biển sâu tối đa 400 ft (∼ 120 m),
chiều dài chân được thiết kế lớn nhất là 167 m (bao gồm đế chân), có thể khoan tới giếng dầu có độ
sâu 9000 m. Trong trạng thái vận hành, giàn khoan tự nâng 400 ft có thể hoạt động trong điều kiện
môi trường có chiều cao sóng lên tới 22 m, chịu được gió bão cấp 12.
Giàn khoan tự nâng không thể tự hành, để di chuyển giữa các vị trí khác nhau trên biển cần có sự
hỗ trợ của tàu kéo (gọi là di chuyển ướt) hoặc sử dụng phương tiện chuyên chở (gọi là di chuyển khô).
∗
Tác giả chính. Địa chỉ e-mail: (Cường, Đ. Q)
8
chiều dài chân được thiết kế lớn nhất là 167m (bao Giàn khoan tự nâng không thể tự hà
chuyển
gồm đế chân), có thể khoan tới giếng dầu có độ
sâu giữa các vị trí khác nhau trên biển
ogy in Civil
Engineering
NUCE
2018.
13(5):1-16
9000m. Trong trạng thái vận hành, giàn khoan
tự của tàu kéo (gọi là di chuyển ướt
hỗ trợ
nâng 400ft có thể hoạtCường,
động
điều
kiệndụng
Qtrong
và cs.tự
/ Tạp
chí Khoa
họcmôi
Côngphương
nghệ Xây dựng
tiện chuyên chở (gọi là di chu
rên biển. Một số thông số chính của
giànĐ.khoan
trường có chiều cao sóng lên tới 22m, chịu được gió
bão cấp 12.
Hiện
khả năng hoạt
nâng trong
Giàn khoan tự nâng không thể tự hành, để di
400ft (~120m),
chuyển
tính toán c
ất là 167m
(baogiữa các vị trí khác nhau trên biển cần có sự Hình 1. Hình ảnh thực tế giàn
hỗđộtrợ
(chân hoặc
khoan tự nâng nổi trên biển
g dầu có
sâucủa tàu kéo (gọi là di chuyển ướt) hoặc sử
dụng
phương
tiện
chuyên
chở
(gọi
là
di
chuyển
khô).
chưa xét đ
, giàn khoan tự
điều kiện môi
Hiện nay, các tiêu chuẩn tính toán giàn khoan
tự việc
do đó
m, chịu được gió
nâng trong trạng thái di chuyển ướt [1, 2] (Hình 2),
lựcviệc
thủy độ
tính toán chỉ được thực hiện cho các cấu kiện riêng lẻ
báo dựa và
(chân hoặc thân) dựa vào mô hình tương đương mà
ể tự hành, để di
chưa xét đến sự làm việc đồng thời của cả chân vàđịnh
thân,lực th
n biển cần có sự Hình 1. Hình ảnh thực tế giàn
phần
Hình
2. Mô
tương
Hình 1. Hình ảnh thực tế giàn khoando
tự nâng
Hình 2.tra
Mô
hình tương
đương
để phân
tích
giànthân
khoan
đó việc kiểm
bền
cục
bộ hình
cho
kết
cấu
chịutử bi
ển ướt) hoặc sử
khoan tựnổi
nâng
trênnổi
biểntrên biển
tự
nâng
trong
trạng
thái
di
chuyển
[1,
2]
lực thủy động và tảiđương
trọng để
khác
chưatích
được
xét đến.
Bàithể (b
tổng
phân
giàn
di chuyển khô).
báo dựa vào các lýkhoan
thuyếttựsóng
nhiễu
xạ,
bức
xạ
để
xác
chi
tiết liên
nâng
trong
trạng
Hiện nay, cácHiện
tiêunay,
chuẩn
tính
toán
giàn
khoan
tự
các tiêu chuẩn tính toánđịnh
giàn khoan
tự nâng
trongvà
trạng
di chuyển
[1, 2]
(Hình 2),pháp
lực thủy
động
lựcthái
quán
tính ướt
theo
phương
bền kết cấu
thái
di thân)
chuyển,
[1,
2]hình
tính
toán
chỉhình
được
thực
hiện cho
các
(chân
hoặc
vào
mô
g trong trạngviệc
thái
di 2.
chuyển
ướt
[1,tương
2] (Hình
2),
việccấu
phần
tử kiện
biên,riêng
saulẻđấy
chuyển
cácdựalực
này
vào tương
mô hình
Hình
Mô
đương
mà hiện
chưa cho
xét đến
sựcấu
làmkiện
việcriêng
đồng lẻ
cả chân và thân, do đó việc kiểm tra bền cục bộ cho
toán chỉ được
thực
các
tổngthời
thểcủa(bao
gồm
cấu
thân,
chân, đế
chân và các
đương
để
phân
tích
giàn
2.
Cơkết
sởđến.
lýBài
thuyết
kết
cấu
thân
chịu
lực
thủy
động
và
tải
trọng
khác
chưa
được
xét
báo dựađể
vào tính
các lý toán
thuyết kết cấu
n hoặc thân)
dựa
vào
mô
hình
tương
đương
mà
chi
tiết
liên
kết
thân
với
chân)
để
tính
toán
và
kiểm
khoan
tự
nâng
trong
trạng
nhiễu xạ, bức xạ để xác định lực thủy động và lực quán tính
theo phương pháp phần tử biên,
sau tra
chuyển
a xét đến sựsóng
làm
việc
đồng
thời
của
cả
chân
và
thân,
cấugồm
chân
theo
cácđếtiêu
hiện
di các
chuyển,
đấythái
chuyển
lực này[1,
vào2]
mô hình bền
tổng kết
thể (bao
kếtvà
cấuvỏ
thân,
chân,
chânchuẩn
và các chi
tiếthành.
liên
đó việc kiểm
tra
bền
cục
bộ
cho
kết
cấu
thân
chịu
kết thân với chân) để tính toán và kiểm tra bền kết cấu chân và vỏ theo các tiêu chuẩn hiện hành.
2. Cơ
lý thuyết
tínhxéttoán
kết cấu giàn
tự nâng
2.1.khoan
Tải trọng
sóngtrong
và lựctrạng
quánthái
tính di
hủy động
và tảisởtrọng
khác chưađểđược
đến. Bài
chuyển
dựa vào các2.lýCơ
thuyết
nhiễu
xạ, toán
bức xạ
xác
sở lý sóng
thuyết
để tính
kếtđể
cấu
giàn khoan tự nâng trong trạng thái di chuyển
a. Định nghĩa các chuyển động (Hình
lực thủy động và lực quán tính theo phương pháp
2.1.
Tải
trọng
và
lực
quán
tính
2.1.
Tải
trọngsóng
sóng
quán
n tử biên,
sau
đấy
chuyển
các và
lựclực
này
vàotính
mô
hình
a. a.
Định
nghĩa
các chuyển
động
(Hình
thể (bao gồm
kết
cấu nghĩa
thân,
chân,
đế
chân
và 3)các(Hình 3)
Định
các chuyển
động
iết liên kết thân với chân) để tính toán và kiểm tra
kết cấu chân và vỏ theo các tiêu chuẩn hiện hành.
Dịch
chuyển
Dịch chuyển
1.
Dịch
dọc (theo phương X)
ết cấu giàn khoan tự nâng trong trạng thái di
1.
Dịch
dọc (theo phương X)
2. Dịch ngang (theo phương Y)
2.Dao
Dịch
ngang
(theophương
phương
3.
động
đứng (theo
Z) Y)
3. Dao động đứng (theo phương Z)
Xoay
4. Lắc dọc (quanh trục X)
Xoay
(Hình 3)
5. Lắc ngang (quanh trục Y)
4.Xoay
Lắckết
dọc
trụcZ)X)
6.
cấu(quanh
(quanh trục
5. LắcHình
ngang3.(quanh
trục Y)hệ trục tọa độ và
Định nghĩa
Hình
3. Định
nghĩanghĩa
hệ trụchệ
tọatrục
độ vàtọa
cácđộ
phương
Hình
3. Định
và
Dịch
chuyển
6. Xoay kết các
cấu phương
(quanh trục
Z) động
chuyểnchuyển
động
chuyển
các phương
động
1. Dịch dọc (theo phương X)
2. b.Dịch
ngang
(theo
phương
Phương
trình
chuyển
độngY)
3. Dao
động đứng
(theo phương
Z)quát có dạng [3]:
Phương
trình chuyển
động tổng
2
Xoay
¨
˙
ộ và
(M + A) U + C U + Khys U = F (t)
4. Lắc dọc (quanh trục X)
5. Lắc ngang (quanh trục Y)
6. Xoay kết cấu (quanh trục Z)
9
(1)
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
trong đó M là ma trận khối lượng kết cấu trong tọa độ tổng thể; A là ma trận khối lượng nước kèm với
các thành phần Ai j tương ứng được tính theo hàm thế sóng bức xạ ϕr j và ni là véc tơ pháp tuyến của
phần tử có diện tích dS trên bề mặt ngập nước S 0 của kết cấu:
Ai j = Re
ρ
ϕ
n
dS
(2)
r
j
i
S0
trong đó C là ma trận cản với các thành phần Ci j được xác định theo hàm thế sóng bức xạ ϕr j (bỏ qua
ảnh hưởng cản nhớt của môi trường và cản nội kết cấu) được xác định theo công thức sau:
Ci j = Im
ωρ
ϕ
n
dS
(3)
rj i
S0
trong đó ω là tần số sóng có kể đến ảnh hưởng của dòng chảy thông qua hiệu ứng Doppler phụ thuộc
vào vận tốc dòng chảy và góc hợp bởi chiều của dòng chảy và ảnh hưởng của vận tốc chuyển động
công trình và ρ là khối lượng riêng của nước biển.
Khys là ma trận độ cứng thủy tĩnh, được thiết lập bởi các lực phục hồi hay lực thủy tĩnh tác dụng
lên mặt ướt S 0 khi kết cấu thực hiện các dao động lắc. Các lực phục hồi này có xu hướng đưa công
trình trở lại trạng thái cân bằng ban đầu. Cụ thể:
Khys
=
0
0
0
0
0
0
0 0
0 0
0 K33
0 K43
0 K53
0 0
0
0
0
0
0
0
K34 K35
0
K44 K45 K46
K54 K55 K56
0
0
0
(4)
trong đó
K33 = −ρg
n3 dS ;
K45 = K54 = −ρg
S0
K34 = −ρg
S0
Y − Yg n3 dS ;
2
Y − Yg n3 dS + ρg ZB − Zg ∇
K44 = −ρg
(5)
S0
S0
2
X − Xg n3 dS ; K55 = −ρg
K35 = −ρg
X − Xg Y − Yg n3 dS
X − Xg n3 dS + ρg ZB − Zg ∇
S0
S0
K46 = −ρg ZB − Zg ∇;
K56 = −ρg YB − Yg ∇
˙ U¨ lần lượt là véc tơ thành phần vận tốc và gia tốc chuyển động của hệ.
U,
F(t) là véc tơ tải trọng sóng tác động lên thân nổi của kết cấu, bao gồm lực sóng tới (F I ) và lực
sóng nhiễu xạ (F D ). Bỏ qua ảnh hưởng của các yếu tố thủy động bậc cao, thành phần chuyển động
thứ j của véc tơ lực sóng bậc 1 tác dụng lên kết cấu được đặc trưng bởi hàm thế vận tốc ϕ X¯ tại điểm
X¯ = (X, Y, Z) được xác định như sau:
F j = FI j + FD j
(6)
10
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
trong đó Lực sóng tới Froude-Krylov, xác định theo:
F I j = −iωρ
ϕI X¯ n j dS
(7)
ϕd X¯ n j dS
(8)
S0
Lực sóng nhiễu xạ, xác định theo:
Fd j = −iωρ
S0
trong đó ϕI , ϕd lần lượt là hàm thế sóng tới, nhiễu xạ sẽ được xác định ở mục c dưới đây.
c. Xác định thế vận tốc [3, 4]
Sóng được đặc trưng bởi hàm thế vận tốc ϕ X¯ để tính toán giá trị sóng nhiễu xạ, bức xạ và các hệ
số trong phương trình (1) được giả thiết với các điều kiện dưới đây trong hệ trục tọa độ gốc (OXYZ,
Hình 3):
Công thức Laplace:
∂2 ϕ ∂2 ϕ ∂2 ϕ
∆ϕ =
+
+
(9)
∂X 2 ∂Y 2 ∂Z 2
Áp dụng cho mọi miền ướt trên kết cấu.
Phương trình điều kiện biên mặt thoáng:
− ω2 ϕ + g
∂ϕ
= 0,
∂Z
với z = 0
(10)
Điều kiện biên tiếp xúc:
∂ϕ
−iωni
=
∂ϕ
∂n
−
∂n
cho hàm thế sóng bức xạ
cho hàm thế sóng nhiễu xạ
(11)
Phương trình điều kiện biên đáy biển độ sâu d:
∂ϕ
= 0,
∂z
với z = d
(12)
Với điều kiện biên xa vô cùng thì điều kiện x2 + y2 → ∞ cần đưa vào phương trình bức xạ.
Để xác định hàm thế vận tốc sóng. Sử dụng phương trình Laplace, các điều kiện biên nêu trên và
Hàm Green’s [3, 4], khi đó hàm thế được viết như sau:
1
ϕ X¯ =
4π
¯ ξ,
¯ ω dS
σ ξ¯ G X,
(13)
S0
Thay công thức (13) vào các công thức (2), (3), (7), (8) thu được các giá trị Ai j , Ci j , F I j , Fd j để
giải phương trình chuyển động (1).
11
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
d. Lực quán tính
Sau khi có các thành phần chuyển động lắc của trọng tâm hệ được xác định từ phương trình chuyển
động (1), các thành phần này gây ra lực quán tính tại điểm đặt khối lượng thứ i của các kết cấu của
thuộc hệ được xác định theo các phương trình sau [5]:
Lực
quán tính
dọc trục and
x: Technology in Civil Engineering NUCE 2018. 13(5):1-16
Journal
of Science
Fiax = −mi aix ,
với aix = a cos β
= −𝑚𝑖 (𝑟𝑖 𝜃̇𝑖𝑥 )
Lực quán tính li tâm:
𝐹𝑖𝜃𝑥
Lực quán tính tiếp tuyến:
𝐹𝑖𝜔 = −𝑚𝑖 (𝑟𝑖 𝜔2 )
Lực quán tính li tâm:
Lực quán tính tiếp tuyến:
(14)
(15)
Fiθx = −mi ri θ˙ix
(15)
= −m r ω2
(16)
F
(16)
i i
Lực quán tính theo trục x do các thành iωphần gia
tốc tịnh tiến và gia tốc xoay gây nên:
Lực quán tính theo trục x do các thành phần gia tốc tịnh tiến và gia tốc xoay gây nên:
̇ θ˙ sin
𝐹𝑖𝑥 = −𝑚
𝛼 + 𝜔2 2 𝑟𝑖 cos
𝑖𝑥i +
Fix 𝑖=(𝑎
−m
aix𝑟𝑖+𝜃r𝑖𝑥
α 𝛼)
i ix sin α + ω ri cos
(17)
(17)
trong𝜃đó θlà
là góc nghiêng do chuyển động lắc của khối lượng thứ i quay quanh trục x (rad) (Hình 4).
trong đó
𝑖𝑥 ix góc nghiêng do chuyển động lắc của khối lượng thứ i quay quanh trục
Lực quán tính theo trục y được biểu diễn tương tự như trục x.
x (rad) (Hình 4). Lực quán tính theo trục y được biểu diễn tương tự như trục x.
4. Lực
quántính
tính trong
hệ trục
độ tọa
cầu độ cầu
Hình 4.Hình
Lực
quán
trong
hệ tọa
trục
2.2. Phân
tích tích
tổng
thể
cấugiàn
giàn
khoan
tựsửnâng
sử dụng
phương
2.2. Phân
tổng
thểkết
kết cấu
khoan
tự nâng
dụng phương
pháp
PTHH pháp PTHH
hìnhtổng
tổng thể
khoan
tự nângtựbao
gồm các
cấu thân,
đế chân.
kết cấu
MôMô
hình
thểgiàn
giàn
khoan
nâng
baokếtgồm
cácchân
kếtvàcấu
thân,Cácchân
vànày
đế chân.
được
mô
hình
bằng
phần
tử
tấm
vỏ
và
thanh
liên
kết
với
nhau
tại
nút.
Phương
trình
phần
tử
hữu
hạn
Các kết cấu này được mô hình bằng phần tử tấm vỏ và thanh liên kết với nhau tại nút.
trong hệ tọa độ tổng thể của kết cấu giàn khoan tự nâng có dạng:
Phương
trình phần tử hữu hạn trong hệ tọa độ tổng thể của kết cấu giàn khoan tự nâng
[K] {XN } = {P}
(18)
có dạng:
trong đó [K] là ma trận độ cứng tổng thể của kết cấu; {XN } là véc tơ chuyển vị các nút kết cấu; {P} là
]{gồm:
𝑋𝑁 } Lực
= {sóng,
𝑃} dòng chảy tại các nút thuộc mặt ướt của (18)
véc tơ lực nút; {P} = Pi , trong đó P[i 𝐾
bao
thân: được xác định trong mục 2.1 và chuyển sang mô hình PTHH sẽ được trình bày ở mục 2.3; Tải
trong đó
là chân
ma trận
độĐược
cứng
thểtiêu
của
kết[2];
cấu;
{X
} làcácvéc
tơ chuyển
trọng[K]
gió lên
và thân:
tínhtổng
toán theo
chuẩn
Phản
lựcNcủa
kết cấu
phụ: được vị
tínhcác nút
toán{P}
riênglà
từng
kếttơ
cấulực
và nhập
vị trí liêni ,trong
kết giữa đó
chúng
thân;
Tải trọng
nghệ,dòng
thiết bị:
kết cấu;
véc
nút;vào
{P}=ΣP
Pi và
bao
gồm:
Lựccông
sóng,
chảy tại
công nghệ và thiết bị đặc trung bởi giá trị và tọa độ trọng tâm được cho trong [6], tải trọng này được
các nút thuộc mặt ướt của thân: được xác định trong mục 2.1 và chuyển sang mô hình
nhập vào các vị trí tương ứng trên mặt bằng công nghệ; Lực quán tính: được tính toán trong mục 2.1.
PTHH sẽ được trình bày ở mục 2.3; Tải trọng gió lên chân và thân: Được tính toán theo
12
tiêu chuẩn [2]; Phản lực của các kết cấu phụ:
được tính toán riêng từng kết cấu và nhập
vào vị trí liên kết giữa chúng và thân; Tải trọng công nghệ, thiết bị: công nghệ và thiết
bị đặc trung bởi giá trị và tọa độ trọng tâm được cho trong [6], tải trọng này được nhập
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
2.3. Chuyển các lực thủy động, thủy tĩnh vào mô hình PTHH [3]
Kết quả từ phương pháp phần tử biên cần chuyển sang phần tử hữu hạn để tính toán kết cấu bao
gồm lực thủy động, thủy tĩnh do sóng và lực quán tính do dao động lắc. Sự khác biệt lớn nhất giữa 2
Journal
and Technology
Civil
Engineering
NUCE
2018.là13(5):1-16
phương pháp
phầnoftửScience
biên (PTB)
và phương in
pháp
phần
tử hữu hạn
(PTHH)
việc lưới chia không
giống nhau làm cho quá trình chuyển lực sóng từ lưới chia phần tử biên sang lưới chia phần tử hữu
Bước
1: Kết
đầu Để
ra của
phương
áp lực
lênđểlưới
chiađổiphần
tử
hạn
trở nên
phứcquả
tạp hơn.
giải quyết
vấn pháp
đề nàyphần
ta có tử
thểbiên
dùnglà1 thuật
toán
chuyển
chúng
biên:
như
sau:P1, P2 … Pn (Hình 5a). Lưới chia PTB thường thô, có kích thước lớn (cạnh lớn
nhất
từ 1:2-5m);
Bước
Kết quả đầu ra của phương pháp phần tử biên là áp lực lên lưới chia phần tử biên:
P1Bước
, P2 , . .2:
. , PQuy
Lưới
chia
PTB tử
thường
kích thước
2-5các
m); nút
n (Hình
áp5(a)).
lực tại
các
phần
trên thô,
lướicóchia
PTB lớn
về (cạnh
giá trịlớnápnhất
lựctừtại
Bước 2: Quy áp lực tại các phần tử trên lưới chia PTB về giá trị áp lực tại các nút trong lưới chia
trong lưới chia PTB từ các diện tích quy đổi quanh nút PTB (Hình 5b);
PTB từ các diện tích quy đổi quanh nút PTB (Hình 5(b));
Bước3:
3: Từ
trí trí
và tọa
2 mô từ
hình,
chuyển
giá chuyển
trị áp lựcgiá
nút trị
trong
Bước
Từcác
cácvịvị
và độ
tọađãđộxácđãđịnh
xáctừđịnh
2 mô
hình,
áplưới
lựcchia
nút
PTB
sanglưới
giá trị
áp lực
nútsang
tronggiá
lướitrị
chia
hữutrong
hạn theo
pháp trọng
số trung
trong
chia
PTB
ápphần
lực tửnút
lướiphương
chia phần
tử hữu
hạn bình
theo
(Hình
5(c));
phương pháp trọng số trung bình (Hình 5c);
(a)
(b)
(c)
Hình 5. Minh
họa các bước chuyển lực sóng từ mô hình PTB sang mô hình PTHH
Hình 5. Minh họa các bước chuyển lực sóng từ mô hình PTB sang mô hình PTHH
3. Thuật toán tổng quát kết hợp giữa phần tử biên và phần tử hữu hạn để tính
toán tổng thể giàn khoan tự nâng trong trạng thái di chuyển
3. Thuật toán tổng quát kết hợp giữa phần tử biên và phần tử hữu hạn để tính toán tổng thể
Dưới đây (Hình 6) là thuật toán tổng quát để tính toán tổng thể kết cấu giàn khoan
giàn khoan tự nâng trong trạng thái di chuyển
tự nâng trong trạng thái di chuyển kết hợp giữa phương pháp PTB và PTHH. Ngoài ra,
bài báo
còn
sự khác
nhau
mô tổng
hìnhthể
PTB
và PTHH.
Hình
6 làlàm
thuậtrõtoán
tổng quát
để giữa
tính toán
kết cấu
giàn khoan tự nâng trong trạng thái di
chuyển kết hợp giữa phương pháp PTB và PTHH. Ngoài ra, bài báo còn làm rõ sự khác nhau giữa mô
- Mô hình PTB: Trong phương pháp PTB xem kết cấu là tuyệt đối cứng đặc trưng
hình PTB và PTHH.
bởi 1- chất
điểm có các trưng về khối lượng (tổng khối lượng, điểm đặt và mô men quán
Mô hình PTB: Trong phương pháp PTB xem kết cấu là tuyệt đối cứng đặc trưng bởi 1 chất điểm
tính
khối
lượng).
vậy(tổng
trong
môlượng,
hìnhđiểm
PTBđặtchỉ
cầnmen
quan
tâm
mặt ướt
của
kết
có các
trưng
về khốiVì
lượng
khối
và mô
quán
tínhđến
khốibề
lượng).
Vì vậy
trong
cấu
mà
không
cần
quan
tâm
đến
các
kết
cấu
khác
và
hệ
thống
gia
cường
bên
trong
thân
mô hình PTB chỉ cần quan tâm đến bề mặt ướt của kết cấu mà không cần quan tâm đến các kết cấu
chính.
khác và hệ thống gia cường bên trong thân chính.
- -Mô
hình
PTHH:
mô hình
vụ cho
kếttính
cấu, vì
thế kết
các kết
Mô
hình
PTHH:
môPTHH
hình phục
PTHH
phụcviệc
vụtính
chotoán
việc
toán
cấu,cấuvìtrong
thế mô
các
hình
cần
đầy
đủ
và
chính
xác,
tùy
thuộc
vào
khả
năng
xử
lý
của
phần
cứng
và
phần
mềm
tính
toán
kết cấu trong mô hình cần đầy đủ và chính xác, tùy thuộc vào khả năng xử lý của phần
mà lựa chọn mô hình tổng thể cho phù hợp, thông thường mô hình PTHH tổng thể bao gồm kết cấu
cứng
và phần mềm tính toán mà lựa chọn mô hình tổng thể cho phù hợp, thông thường
chân, thân và đế chân, các kết cấu còn lại được mô hình dưới dạng phản lực đặt vào vị trí liên kết giữa
mô
hình
PTHH tổng thể bao gồm kết cấu chân, thân và đế chân, các kết cấu còn lại
chúng và thân chính.
được mô hình dưới dạng phản lực đặt vào vị trí liên kết giữa chúng và thân chính.
13
Cường,
Đ. Technology
Q và cs. / Tạp in
chíCivil
Khoa Engineering
học Công nghệNUCE
Xây dựng
Journal of Science
and
2018. 13(5):1-16
Số liệu đầu vào
Mô hình phần tử biên
Mô hình khối lượng
Chia lưới phần tử biên
Mô hình phần tử hữu hạn
Thiết lập thông số môi trường
Lưới chia phần hữu hạn
Giải phương trình chuyển động
- Lực thủy tĩnh, lực sóng tới,
nhiễu xạ, bức xạ
- Gia tốc (lực quán tính)
- Tải trọng công nghệ, tải trọng gió
- Phản lực của các kết cấu phụ
truyền xuống thân chính.
Giải kết cấu theo phương pháp PTHH
Bộ kết quả chuyển vị nội lực ứng suất trong các phần tử
Kiểm tra
Hình
6. 6.Thuật
kếthợphợp
vàhữu
phần
hữu tra
hạnkếtđểcấukiểm
trathước
kết cấu
Hình
Thuật toán
toán kết
giữagiữa
phần phần
tử biêntử
vàbiên
phần tử
hạn tử
để kiểm
nổi kích
lớn nổi
kích thước lớn
Bảng 1. Đặc điểm công trình và thông số tính toán
4. Ứng dụng kiểm tra bền kết cấu thân và chân giàn khoan tự nâng 400ft trong
trạng thái di chuyển bằng phần
mềm chuyên dụng ANSYS/AQWA
Quy mô kết cấu giàn khoan tự
Vật liệu chế tạo giàn khoan
nâng 400 ft
tự nâng 400 ft
Tải trọng tính toán
4.1. Đặc điểm công trình và số liệu tính toán (Bảng 1)
Tải trọng thiết bị và công nghệ
Chiều dài lớn nhấtBảng
của 1.
thân:
đàn hồi:
E và
= 20000
Đặc Module
điểm công
trình
thông
số
toán
trêntính
giàn
theo Weight Control
70,4 m
kN/cm2
Report
(WCR)
của JU-2000E.
Quy mô kết cấu giàn khoan
Vật liệu chế tạo giàn
Tải
trọng
tính toán
đàntựhồi
trượt:
G=
400fthân: 76 m Module
khoan
nâng
400ft
Bề rộngtự
lớnnâng
nhất của
Số liệu môi trường:
2
8000 kN/cm
Tải trọng thiết bị và công
Giới hạn bền: Fy = 34,5
Chiều
dàicủa
lớnthân:
nhất9,5
của
Module
đàn
hồi:
nghệ
giàn
Chiều cao
m
Chiều
caotrên
sóng:
H =theo
3m Weight
kN/cm2
2
thân:
70,4 m
E = 20000 kN/cm
Control Report (WCR) của
Mớn nước tính toán trong quá Khối lượng riêng: Fy = 7,85
Chu
kỳ sóng: T = 6 s
JU-2000E.
trình di chuyển : 7320 mm
T/m3
Bề
rộng
nhấtkếtcủa
thân:
Module đàn hồi trượt:
Tổng
khốilớn
lượng
cấu,
hàng
Số liệu môi trường:
76
G = 8000 kN/cm2
hóamthiết bị nước giằn: khoảng
Vận tốc gió: v = 75 knots
Giới hạn bền:
24642 tấn
Chiều
cao của thân: 9,5 m
Chiều cao sóng: H = 3m
Fy = 34,5 kN/cm2
Mớn nước tính toán trong
quá trình di chuyển : 7320
mm
Tổng khối lượng kết cấu,
hàng hóa thiết bị nước giằn:
khoảng 24642 tấn
Khối lượng riêng:
= 7,85 T/m3
Chu kỳ sóng: T = 6s
14
Vận tốc gió: v = 75knots
Journal of
Science
and Engineering
Technology in Civil Engineering
2018.13(5):1-16
13(5):1-16
nce and Technology
in
Civil
NUCENUCE
2018.
Journal of Science and Technology in Civil Engineering NUCE 2018. 13(5):1-16
Phạmbộ
vi tính
toán:
Sử
phần
mềm
ANSYS/AQWA,
mô đun
AqwaAqwa
sử
n: Sử dụng
phần
mềm
đun
sử
Cường,
Đ. dụng
Q và cs.bộ
/ ANSYS/AQWA,
Tạp
chí Khoa
học Công
nghệ Xây dựng mô
dụng
phương
pháp
phần
tử
biên
tính
toán
các
phản
ứng
kết
cấu,
gia
tốc
lắc
và
các
lực
Phạm
vi
tính
toán:
Sử
dụng
bộ
phần
mềm
ANSYS/AQWA,
mô
đun
Aqwa
sử
n tử biên tính toán các phản ứng kết cấu, gia tốc lắc và các lực
4.thủy
Ứng
dụng
kiểm
traphần
bền động
kết
cấu
và
chân
giàn
khoan
tự kết
nâng
400ft
trong
trạng
dụng
phương
pháp
tử thân
biên
tính
toán
phản
gia
tốc
lắc đun
vàthái
cácdiAnsys
lực
tĩnh
cũng
như
thủy
lênthân
kếtgiàn
cấu
vỏcác
thân
giànứng
khoan
tựcấu,
nâng.
Mô
đun
Ansys
y động
lên
kết
cấu
vỏ
khoan
tự nâng.
Mô
chuyển
bằng
phần
mềm
chuyên
dụng
ANSYS/AQWA
cũng lực,
như
thủy
động
lên
cấu
vỏsuất
thân
giàn
khoan
tự nâng.
Môkết
đun
Ansyscấu.
statictĩnh
structure
sử dụng
tính
toán
nộikết
lực,
ứng
biến
dạng
của
các
phần
tử
cấu.kết
g tính thủy
toán
nội
ứng
suất
biến
dạng
của
các
phần
tử
static
structure
sử
dụng
tính
toán
nội
lực,
ứng
suất
biến
dạng
của
các
phần
tử
kết
cấu. và
Ngoài
ra
sử
dụng
các
bảng
tính
bền
theo
[7]
và
[8]
để
kiểm
tra
bền
cho
kết
cấu
chân
và
4.1. Đặc
điểmtheo
công trình
và số
liệu[8]
tính toán
1)
ảng tính
bền
[7]
và
để(Bảng
kiểm
tra bền cho kết cấu chân
Ngoài
ra
sử
dụng
các
bảng
tính
bền
theo
[7]
và
[8]
để
kiểm
tra
bền
cho
kết
cấu
chân
và
thân
của vi
giàn
tự dụng
nângbộ
400ft
thái di chuyển
với
điềusửkiện
môi
trường
nâng 400ft
trong
thái
ditrạng
chuyển
với
điều
kiện
môi
trường
Phạm
tínhkhoan
toán: trạng
Sử
phầntrong
mềm
ANSYS/AQWA,
mô đun
Aqwa
dụng
phương
pháp
thân
của
giàn
khoan
tự nâng 400ft trong trạng thái di chuyển với điều kiện môi trường
trong
biển
Việtcác
Nam.
am.
phần
tửvùng
biên tính
toán
phản ứng kết cấu, gia tốc lắc và các lực thủy tĩnh cũng như thủy động lên
trong vùng biển Việt Nam.
kết cấu vỏ thân giàn khoan tự nâng. Mô đun Ansys static structure sử dụng tính toán nội lực, ứng suất
4.2.
Các của
mô các
hình phục
vụ tính
toán ra sử dụng các bảng tính bền theo [7] và [8] để kiểm tra bền
vụ tínhbiến
toán
dạngmô
tử kết
4.2. Các
hìnhphần
phục
vụ cấu.
tínhNgoài
toán
cho kết
cấutính
chântoán
và thân
của
khoan
nâng
400trong
ft thái
trong
trạng
thái
chuyểncần
với
môi hình
Để
kết
cấu giàn
giàn
khoantựtự
nâng
trạng
thái
didichuyển
3điều
môkiện
cấu giàn
khoan
tự
nâng
trong
trạng
di
chuyển
cần
3hình
mô
Để
tính
toán
kết
cấu
giàn
khoan
tự
nâng
trong
trạng
thái
di
chuyển
cần
3
mô
hình
trường
chính.trong vùng biển Việt Nam.
chính.
Mômôhình
7) để đặc
xác định
các đặc về
trưngkhối
về khối lượng
lượng của kết
cấukết cấu
ng (Hình
7)
để
xác
trưng
của
4.2. Các
hìnhkhối
phụclượng
vụđịnh
tính(Hình
toáncác
Mô
hình
khối
lượng (Hình
7) để
xác
định trọng
các đặc
trưng
vềmen
khốiquán
lượng
của
kết cấu
trong
trạng
thái
di
chuyển
như
tổng
khối
lượng,
tâm
và
mô
tính
khối
yển như Để
tổng
khối giàn
lượng,
trọng
tâm
và
môcầnmen
quán tính khối
tính toán
khoan
nâng
trong lượng,
trạng
tháitrọng
di chuyển
mô hình
trong trạng
tháikếtdicấu
chuyển
nhưtựtổng
khối
tâm và 3mô
menchính.
quán tính khối
lượng
của
kết
cấu
làm đầu
vàođểcho
hình PTB.
đầu vào
cho
mô
hình
PTB.
Môcủa
hình
khối
lượng
xácmô
định
đặcPTB.
trưng về khối lượng của kết cấu trong trạng thái
lượng
kết
cấu
làm(Hình
đầu 7)
vào cho
mô các
hình
di
chuyển
như
tổng
khối
lượng,
trọng
tâm
và
mô
men
quánvỏ
tính
khối
lượng
cấu
làmnước,
đầu
vào nước,
Mô hình PTB
(Hìnhkết
8): chỉ bao vỏ
gồm thân
kết cấu
thân
tiếp
xúccủa
trựckếttiếp
với
ình 8): chỉ
gồm
tiếp
xúc
tiếp
với
Mô bao
hình PTB
(Hình 8): cấu
chỉ bao gồm
kết cấu
vỏ thân
tiếp trực
xúc trực
tiếp với
nước,
cho
mô
hình
PTB.
phương
pháp
PTB đối
xem kết
cấu là tuyệt
đối
cứngđiều
với các kiện
điều kiệnbiên
biên nên
ở mục
2.1
m kết cấu
là
tuyệt
cứng
với
các
nên
ở
mục
phương pháp PTB xem kết cấu là tuyệt đối cứng với các điều kiện biên nên ở mục 2.1 2.1
Mô
hình
PTB
(Hình
8): chỉ
bao
gồm
kết cấu
vỏ
thân
tiếp xúc
trực tiếp với nước, phương pháp
đểxác
xácđịnh
định
lực
sóng
và
tính
cấu
giàn
khoan
tự nâng.
quánđể
tính
lênlực
kết
cấu
giàn
khoan
tự
nâng.
sóng
và quán
quán
tínhlên
lên
kết
cấu
giàn
khoan
tự nâng.
PTB xem kết cấu là tuyệt đối cứng với các điều kiện biên nên ở mục 2.1 để xác định lực sóng và quán
Mô
hình PTHH
PTHH
(Hình
9)9)là
tính
toán
trựctrực
tiếptiếp
kết
cấu cấu
bao
gồm
kết cấu
(Hình 9)
là
hình
tính
toán
trực
tiếp
kết
cấu
bao
kết
Mô
hình
làmô
môhình
hình
tính
toán
kết
baogồm
gồm
kết
cấu cấu
tính lên
kếtmô
cấu giàn
khoan(Hình
tự nâng.
thân,
đế
chân
và
chân.
Các
tải
trọng
từ
môi
trường
đến
công
nghệ
…
sẽ
được
mô
hình
Các tải
trọng
từ
môi
trường
đến
công
nghệ
…
sẽ
được
mô
thân,Mô
đếhình
chân
và chân.
Các
tải hình
trọng
môitrực
trường
nghệ
được
mô và
hìnhhình
PTHH
(Hình 9)
là mô
tínhtừtoán
tiếp kếtđến
cấu công
bao gồm
kết …
cấu sẽ
thân,
đế chân
hóa
lên
mô
hình
PTHH.
.
hóa
lên
mô
chân.
Các
tảihình
trọngPTHH.
từ môi trường đến công nghệ . . . sẽ được mô hình hóa lên mô hình PTHH.
hối
nâng
HìnhHình
7. Mô7.hình
khối
lượng
HìnhHình
8. Mô8.hình
vàhình
chia lưới
PTB HìnhHình
9. Mô 9.
phần
tử hữu
hạntử
hình
khốigiàn
Mô
chia
Mô
hình
phần
Hình
Mô
hình
và
Hình
9.
hình
phần
tử
Hình
7.Mô
Mô8.
hình
khối
Hình
8.chia
Mô
hình
và và
chia
Hình
9.Mô
Môhình
hình
phần
tử
khoan
nâng 400tựft nâng
giàn khoan
nâng khoan
400 ft tự
giàn
khoan
nâng khoan
400 ft tự
lượng
giàntự khoan
lưới
PTBtựgiàn
hữu
hạntựgiàn
lưới
PTB
hạn
giàn
khoan
tự
lượng
giàn khoan
tự giàn
nâng khoan
lưới PTB tự
giàn khoan tự hữuhữu
hạn giàn
khoan
tự
400ft
nâng
400ft
nâng
400ft
nâng
400ft
400ftnâng 400ft
nâng 400ft
nâng 400ft
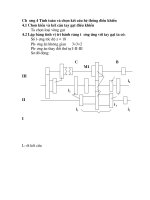
4.3. Liên kết giữa chân và thân [1]
4.3.
Liên
kết
giữa
chân
vàthân
thân
[1] trọng ảnh hưởng đến kết quả của bài toán vì thế cần mô tả
chân
và và
thân
rất quan
và thân
[1]
4.3.Liên
Liênkết
kếtgiữa
giữa
chân
[1]
chính xác cáckết
liêngiữa
kết này.
Cácvà
vị thân
trí dẫnrất
hướng
trêntrọng
và dưới
có khoảng
từ 8-13
mm giữa
răng vì
chân
quan
ảnh
hưởng hở
đến
kết quả
của bánh
bài toán
ân và thânLiên
rấtkết
quan
trọng
hưởng
kết
của
bài
toán vì
Liên
giữa chân
và chịu
thânảnh
rất cho
quan
trọng
ảnh đến
hưởng
đến
kếtquả
quả của
bài toán
vì cố
và thân,
các phần
tử chỉ
nén
2 liênCác
kết này.
Trên
thực
tế, hệ thống
cố định
thế
cần sử
môdụng
tả chính
xác
các liên
kết này.
vị trí
dẫn
hướng
trên và
dướithân
cóchỉ
khoảng
c các liên
kết
này.
Các
vị
trí
dẫn
hướng
trên
và
dưới
có
khoảng
thế
cần
mô
tả
chính
xác
các
liên
kết
này.
Các
vị
trí
dẫn
hướng
trên
và
dưới
có
khoảng
định
phươnggiữa
Z (phương
X (dịch
sangphần
2 bên)tửnên
sử dụng
giải kết
hở
từtheo
8-13mm
bánh nâng
rănghạ)
vàvà
thân,
sử chuyển
dụng các
chỉta chịu
nénphần
chotử2cóliên
nh răng
và
thân,
sử
dụng
các
phần
tử
chỉ
chịu
nén
cho
2
liên kết
hở
từ
8-13mm
giữa
bánh
răng
và
thân,
sử
dụng
các
phần
tử
chỉ
chịu
nén
cho
2
liên
kết
phóng
mô men
phương
và cố
dịchđịnh
chuyển
theo
Y (hướng
vào). TạiZ1 (phương
thời điểm nâng
nhất định,
này.
Trên
thựccảtế,3 hệ
thống
thân
chỉphương
cố định
theo phương
hạ) và
ống cốliên
định
thân
cố
theo
phương
Z
(phương
này.
Trên
tế, chỉ
hệkhông
thống
cốđịnh
định
chỉ cốđược
địnhmô
theo
phương
Z (phương
nângnâng
hạ)11,
và 12hạ) và
kết
nângthực
hạ (Pin)
hoạt
động thân
nên không
tả trong
sơ đồ
tính. Các Hình
10,
sau đây mô tả liên kết giữa chân và thân giàn (cấu tạo trên thực tế và mô hình hóa trên phần mềm).
8
8
815
đây
mô
tảgiữa
liên
giữa
chân
vàvào).
thân
giàn
(cấu
tạo
trên
thực
tếđịnh,
vàmô
mô
hình
hóa
trên
phần
và
dịch
chuyển
theo
phương
YYvà
(hướng
thời
điểm
nhất
liên
kết
nâng
hạhạ
và
dịch
chuyển
theo
phương
(hướng
vào).
Tại
1tạo
thời
điểm
nhất
liên
kết
nâng
đây
mô
tả
kết
chân
thân
giàn
(cấu
trên
thực
tế
và
hình
hóa
trên
phần
đây
mô
tảliên
liên
kết
giữa
chân
và
thân
giàn
(cấu
tạo
trên
thực
tếđịnh,
và
mô
hình
hóa
và dịch chuyển
theo
phương
Ykết
(hướng
vào).
TạiTại
1 1thời
điểm
nhất
định,
liên
kết
nâng
hạ
mềm).
(Pin)
không
hoạtnên
động
nênkhông
không
được
môtrong
trong
tính.Các
CácHình
Hình10,
10,
11,
sau
(Pin)
không
hoạt
động
nên
được
tảtảtrong
đồđồtính.
tính.
Các
11,
121212
sau
mềm).
mềm).
(Pin) không
hoạt
động
không
được
mômô
tả
sơsơsơ
đồ
Hình
10,
11,
sau
đây
mô
tả
liên
kết
giữa
chân
và
thân
giàn
(cấu
tạo
trên
thực
tế
và
mô
hình
hóa
trên
phần
đâyliên
mô kết
tả liên
kếtchân
giữa chân
và thân
(cấu
trênthực
thực tế
tế và mô
trên
phần
đây mô tả
giữa
và thân
giàngiàn
(cấu
tạotạo
trên
môhình
hìnhhóa
hóa
trên
phần
mềm).
mềm). mềm).
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
Hình10.
10.Cấu
Cấu
tạo
vịtrí
trítạo
liên
kếtliênHình
Hình
11. Liên
LiênLiên
kếtkết
giữa
thân
Hình
12. Mô
Môhình
Hìnhtạo
10.vịCấu
vị kết
trí
kết Hình
11.
giữathân
thân Hình
Hình 12.
Hình
liên
11.
kết
giữa
12.
Mô
hìnhhóahóa
giữa
chân
và
thân
giàn
khoan
và
chân
theo
[1]
liên
kết
trong
phần
giữa
chân
và
thân
giàn
khoan
và
chân
theo
[1]
liên
kết
trong
giữa
giàn
và11.chân
[1]thân và chân Hình 12.liên
kếthóa trong
Hình chân
10. Cấuvà
tạothân
vị trí liên
kếtkhoan
giữa Hình
Liên theo
kết giữa
Mô hình
liên kếtphần
trong
Hình 10.tự
Cấu
tạo
vị
trí
liên
kết
Hình
11.
Liên
kết
giữa
thân
Hình
12.
Mô
hình
hóa
tựnâng
nâng
400ft
mềm
Ansys
tựgiàn
nâng
400ft
mềm
Ansys
Hình
10.400ft
Cấu
tạokhoan
vị
trí tự
liênnâng
kết Hình 11. theo
Liên[1]kết giữa thân Hìnhmềm
12. Ansys
Mô
hình hóa
chân
và
thân
phần
mềm
Ansys
Hình
10.
Cấugiàn
tạo ftvị
trí liên
kết
Hìnhtheo
11. Liên
kết giữa thân Hình
12.
Mô
hình
hóa
giữa chân
và
thân
khoan
và
chân
[1]
liên
kết
trong
phần
400
giữa chân và thân giàn khoan và chân theo [1]
liên kết trong phần
giữa
chân
và
thân
giàn
khoan
và
chân
theo
[1]
liên
kết
trong
phần
tự nâng 400ft
mềm
Ansys
tự
nâng
400ft
mềm Ansys
4.4.
Kết
quả
tính
toántính
bằng
ANSYS/AQWA
4.4.tính
Kếttoán
quả
toán
bằng ANSYS/AQWA
4.4.
Kết
quả
bằng
ANSYS/AQWA
tự
nâng
400ft
mềm Ansys
4.4. Kết quả tính toán bằng ANSYS/AQWA
Phản
ứng
của
kếtcủa
cấu:
Hàm
truyền
củacủa
dạng
dao
động
chính
đứng(Heave),
(Heave),
- Phản
ứng
kếtHàm
cấu: truyền
Hàm
truyền
3 dạng
daođộng
động chính
chính đứng
- -Phản
ứng
của
kết
cấu:
của
33 dạng
dao
đứng
4.4. Kết quả
tính
toán
bằng
ANSYS/AQWA
4.4.
Kết
quả
tính
toán
bằng
ANSYS/AQWA
daoKết
động
quanh
trục
(Roll),
quay
quanh
trục
(Pitch)
được
thể
hiệndao
trên
-động
Phản
ứng
kết
cấu:
Hàm
của
3 dạng
daotrục
động
chínhđược
đứng
động
quanh
dao
động
quanh
trục
Xtruyền
(Roll),
quay
quanh
Y (Pitch)
được(Heave),
thể hiện
hiện
trên
các
dao
quanh
trục
XX(Roll),
quay
quanh
trục
YY
(Pitch)
thể
trên
cácHình
Hình
4.4.
quảcủa
tínhcủa
toán
bằng
ANSYS/AQWA
- Phản
ứng
kết
cấu:
Hàm
truyền
của
3
dạng
dao
động
chính
đứng
(Heave),
13,
14
và
15.
trục
X
(Roll),
quay
quanh
trục
Y
(Pitch)
được
thể
hiện
trên
các
Hình
13,
14
và
15.
13,ứng
14 vàcủa
15.kết cấu: Hàm truyền của 3 dạng dao động chính đứng (Heave),
Phản
13, 14-và
15.
dao độngdao
quanh
trục
X của
(Roll),
quayHàm
quanh
trục
Y3(Pitch)
được
hiện
trên(Heave),
cácHình
Hình
- Phản
ứng
kết
cấu:
truyền
của
dao
độngthể
chính
đứng
động
quanh
trục
X (Roll),
quay
quanh
trục
Ydạng
(Pitch)
được
thể
hiện
trên
các
13, 14 vàdao
15.động quanh trục X (Roll), quay quanh trục Y (Pitch) được thể hiện trên các Hình
13, 14 và 15.
13, 14 và 15.
Hình
Hàm
truyền
giữa
daogiữa
động Hình
HàmHàm
truyền
giữatruyền
dao giữa
động
15. 15.
Hàm
truyềntruyền
giữa
dao
động
Hình13.
13.
Hàm
truyền
Hình14.14.
14.
truyền
Hình
Hàm
truyền
giữa
Hình
13.
Hàm
truyền
giữa
Hình
14.
Hàm
giữaHình
Hình
15. Hàm
Hàm
giữa
Hình
13.
Hàm
truyền
giữa
Hình
Hàm
truyền
giữa
Hình
15.
truyền
giữa
theo
phương
Heave
(dọc
trục
Z)
và
theo
phương
Roll
(quay
quanh
trục
theo
phương
Pitch
(quay
quanh
trục
dao động
độngdaotheo
theo
phương
daođộng
độngđộng
theotheo
phương
Roll
dao
động
theo phương
phương
động
theo
phương
phương
daovàHàm
động
theo
◦
◦ Roll dao
phương
dao
theo
phương
động
theo
phương
tầntruyền
số tại hướng
sóng
0Hình
X)Hàm
vàdao
tần truyền
số
tại hướng
sóngRoll
0Hình
Y)
tần
số tại
hướng sóng
0◦
Hình 13.dao
Hàm
giữa
14.
giữa
15.
truyền
giữa
Heave
(dọc
trục
Z)ààtrục
tầnZ)
sốàHình
(quay
quanh
trụctrục
X)giữa
vàvà
tần
Pitch
(quay
quanhgiữa
trục
Y)
Heave
(dọc
tần
sốtheo
quanh
X)
tần Pitch
Pitch
(quay
quanh
trục
Y)Y)
Hình
13.
Hàm
truyền
giữa
14.(quay
Hàm
truyền
Hình
15. Hàm
truyền
Heave
(dọc
trục
Z)
tần
số
(quay
quanh
trục
X)
và
tần
(quay
quanh
trục
dao động
theo
phương
dao
động
phương
Roll
động
theo
phương
o
o o dao và
o
o
o
o
o
tại
hướng
sóng
0
số
tại
hướng
sóng
0
tần
số
tại
hướng
sóng
0
tại
hướng
sóng
0 tĩnh,
sốHàm
tại hướng
0lựcPitch
và
tần
sốphần
hướng
sóng
0được
daohướng
động
phương
dao
theo
phương
Roll
daoxạ
động
theo
tại
sóng
0 số
số
tại
hướng
sóng
0tần
và
tần
số
tại
hướng
sóng
0o
- 13.
Giá
trị
gia
tốc,
lực
thủy
lựcđộng
sóng
tới,
lực
nhiễu
xạ,
bức
tại
tâm
tử phương
hữu
hạn
Hình
Hàm
truyền
giữa
Hình
14.
truyền
giữa
Hình
15.
Hàm
truyền
giữa
Heave (dọc
trục
Z)
àtheo
tần
(quay
quanh
trục
X)
vàsóng
(quay
quanh
trục
Y)
o
Heave
(dọc
trục
à tầnsốsốtạidao
(quay
quanh
trục
và
tần và
Pitch
(quay
quanhphương
trục
Y)0o
thể
hiện
HìnhZ)
16.
động
theo
phương
động
theo
phương
Roll
dao
tại hướngdao
sóng
0trên
hướng
sóng
0o X)tới,
tầnđộng
số
tại theo
hướng
sóng
Giá
trị
gia
tốc,
lực
thủy
tĩnh,
lực
sóng
lực
nhiễu
xạ,
lực
bức
xạ
tại
tâm
phần
o
o
ophần
-trịGiá
trịlực
gia
tốc,
thủy
tĩnh,
lực
nhiễu
xạ,
lựcquanh
bứcsuất
xạ
tại
-(dọc
Giá
trịgiágia
lực
thủy
tĩnh,
sóng
tới,
lựclực
nhiễu
xạ,
bức
xạtrục
tạitâm
tâm
phần
- Sử
dụng
nội
phần
tử lực
thanh
của
giàn
khoan
tự
nâng,
ứng
trong
tử
tại hướng
sóng
0Z)
sốlực
tại
hướng
sóng
0chân
và
tần
sốlực
tại
hướng
sóng
0phần
Heave
trục
àtốc,
tần
sốtrong
(quay
quanh
trục
X)sóng
và tới,
tần
Pitch
(quay
Y)
tử
hữu
hạn
được
thể
hiện
trên
Hình
16.
tử
hữu
hạn
được
thể
hiện
trên
Hình
16.
tử
hữu
hạn
được
thể
hiện
trên
Hình
16.
tấm
vỏ,
nội
lực
trong
các
gia
cường
tấm
kết
hợp
với
tiêu
chuẩn
kiểm
tra
bền
cho
kết
cấu
chân
[7],
tiêu
o
o nhiễu xạ, lực bức xạ tại tâm ophần
- Giá
trị giasóng
tốc,0lực
thủy tĩnh,
lựchướng
sóngsóng
tới, 0lực
tại hướng
số tại
và tần số tại hướng sóng 0
chuẩn
kiểm
tra
bền
cho
thân
[8]
ta
được
kết
quả
kiểm
tra
ống chính
củabức
kết xạ
cấutại
chân
các vị trí
Giá
trị
gia
tốc,
lực
thủy
tĩnh,
lực
sóng
tới,
lựcbền
nhiễu
xạ, lực
tâmtạiphần
tử hữu hạn được thể hiện trên Hình 16.
liên
kết
giữa
chân
và
thân
ở
Bảng
2,
kết
quả
kiểm
tra
bền
cho
tấm
và
các
gia
cường
tại
một
số
vị trí có
tử hữu
hạntrị
được
- Giá
gia thể
tốc,hiện
lực trên
thủyHình
tĩnh, 16.
lực sóng tới, lực nhiễu xạ, lực bức xạ tại tâm phần
ứng suất lớn ở Bảng 3.
tử hữu
hạn được thể hiện trên Hình 16.
Nhận xét: Các giá trị UC cho chân và tấm tương đối nhỏ (lớn nhất bằng 0,34) và các giá trị này
đều nhỏ hơn 1 vì vậy kết cấu giàn khoan tự nâng trong trạng thái di chuyển đảm bảo điều kiện bền
theo [7, 8]. Các vị trí có hệ số sử dụng vật liệu lớn nhất trên kết cấu vỏ của thân được thể hiện trên các
Hình 17.
9 9
9
9
9
9
16
Cường,
Q và cs. / Tạp
chí Khoa
học Công
nghệ 2018.
Xây dựng
Journal of Science
andĐ.Technology
in Civil
Engineering
NUCE
13(5):1-16
Journal of Science and Technology in Civil Engineering NUCE 2018. 13(5):1-16
Hình 16. Giá trị gia tốc, lực thủy tĩnh, thủy động được chuyển đổi lên lưới chia PTHH
- Sử dụng giá trị nội lực trong phần tử thanh của chân giàn khoan tự nâng, ứng
suất trong phần tử tấm vỏ, nội lực trong các gia cường tấm kết hợp với tiêu chuẩn kiểm
tra bền cho kết cấu chân [7], tiêu chuẩn kiểm tra bền cho thân [8] ta được kết quả kiểm
tra bền ống chính của kết cấu chân tại các vị trí liên kết giữa chân và thân ở Bảng 2, kết
quả kiểm tra bền
tấm
vàtốc,
cáclựcgia
tại
một
sốchuyển
vị tríđổicólênứng
lớn ở Bảng 3.
Hìnhcho
16. Giá
trị gia
thủycường
tĩnh, thủy
động
được
lưới suất
chia PTHH
- Sửkiểm
dụng giá
nội lực
trong và
phầnnút
tử thanh
của chân
giàn
khoan
tự nâng,
Bảng 2. Kết quả
tratrịbền
thanh
kết cấu
chân
giàn
khoan
tựứng
nâng 400ft
suất trong phần tử tấm vỏ, nội lực trong các gia cường tấm kết hợp với tiêu chuẩn kiểm
tra bền
cho
kếttrị
cấugia
chân
[7],lực
tiêuthủy
chuẩn
kiểm
tra bền
chođộng
thân
[8] ta
được
kếtđổi
quả
kiểm
Hình
16.
Giá
tĩnh,
thủy
động
được
chuyển
Hình
16.
Giá
trịtốc,
gia
tốc,
lực
thủy
tĩnh,
thủy
được
chuyển
đổilên
lênlưới
lưới chia
chia PTHH
PTHH
Bài toán
tra bền ống chính của
các vị
trí liên kết giữa chân và thân
Bảng 2, kếtKết luận
Vịkếttrícấucóchân
UCtạilớn
nhất
UCởmax
quả- kiểm
bền cho
gia cường
một số
trí có ứng
lớn ởgiàn
Bảng 3.
Sử tra
dụng
giá tấm
trị và
nộicáclực
trongtạiphần
tửvịthanh
củasuấtchân
khoan tự nâng,
ứng
Bảng 2. Kết quả kiểm tra bền thanh và nút kết cấu chân giàn khoan tự nâng 400 ft
suất trong
nộithanh
lực và
trong
các
tấmtựkết
hợp
với tiêu chuẩn kiểm
Bảng phần
2. Kết tử
quảtấm
kiểmvỏ,
tra bền
nút kết
cấugia
châncường
giàn khoan
nâng
400ft
tra bền cho kết cấu chân [7], tiêu chuẩn kiểm tra bền cho thân [8] ta được kết quả kiểm
Bài toán
trícó
có UC
UC lớn
UCmax
Kết luận
Bài
toán
trí
lớn
nhấtvị trí liên kết
UCmax
Kết luận
tra bền
ống chính của Vị
kếtVị
cấu
chân
tạinhất
các
giữa
chân
và thân ở Bảng
2, kết
Thỏa
mãn3.
quả kiểm tra bền cho tấm và các gia cường tại một số vị trí có ứng suất lớn ở Bảng
Bền thanh Bảng 2. Kết quả kiểm tra bền thanh và nút kết cấu chân 0,173
điều
giàn
khoan
tự nâng kiện
400ft
Thỏa
mãn
bền
Bền thanh
0,173
Thỏa
mãn
điều kiện bền
Bền thanh
0,173 điều
kiện
Bài toán
Vị trí có UC lớn nhất
bền UCmax
Kết luận
Thỏa
mãn
Thỏa
mãn
0,173Thỏa
điều mãn
kiện
0,190 điều
kiện
bền
bền
0,190
điều
0,190
Thỏa mãnkiện
điều kiện
Bền thanh
Bền nút
Bền nútBền nút
bền
bền
10
Thỏa
Bảng 3. Kết quả kiểm tra bền cho kết cấu vỏ thân giàn khoan tự nâng
400 ftmãn
Bền nút
STT
1
2
3
4
0,190
UCmax
Bài toán10
Kiểm tra khả năng chịu lực của tấm giữa các gia cường
Kiểm tra khả năng chịu lực của tấm chịu ứng suất cắt
Kiểm tra tấm chịu lực cắt
Kiểm tra tấm chịu áp lực bên
10
17
0,25
0,25
0,01
0,34
điều
bền
kiện
Kết luận
Thỏa mãn điều kiện bền
Thỏa mãn điều kiện bền
Thỏa mãn điều kiện bền
Thỏa mãn điều kiện bền
3
Kiểm tra tấm chịu lực cắt
0,01
Thỏa mãn điều
kiện bền
4
Kiểm tra tấm chịu áp lực bên
0,34
Thỏa mãn điều
kiện bền
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
Hình
Vùng
kết vỏ
cấucủa
vỏthân
của giàn
thânkhoan
giàn khoan
nâng
400ft
số sử
vậtnhất
liệu
Hình
17.17.
Vùng
kết cấu
tự nângtự400
ft có
hệ sốcósửhệ
dụng
vậtdụng
liệu lớn
lớn nhất
Nhận xét: Các giá trị UC cho chân và tấm tương đối nhỏ (lớn nhất bằng 0,34) và các giá
5. Kết luận
trị này đều nhỏ hơn 1 vì vậy kết cấu giàn khoan tự nâng trong trạng thái di chuyển đảm
theo
[7, toán
8]. Các
trí cókết
hệhợp
số sử
dụng
vậtvàliệu
lớn nhất
trêntoán,
kết cấu
Bài bảo
báo điều
đã đềkiện
xuấtbền
được
thuật
tổngvịquát
giữa
PTB
PTHH
để tính
kiểm tra
vỏ
của
thân
được
thể
hiện
trên
các
Hình
17.
bền hệ thống kết cấu giàn khoan tự nâng (bao gồm kết cấu thân, kết cấu chân, kết cấu đế chân và các
5. Kết
chi tiết liên
kết luận
giữa thân và chân) trong trạng thái di chuyển bằng mô hình tổng thể. Các kết quả của
phương pháp PTB
nhưđãlực
phần
thân
củatổng
côngquát
trình
nâng
(là PTB
kết cấu
kíchđểthước
Bài báo
đềsóng
xuấtlên
được
thuật
toán
kếttựhợp
giữa
và nổi
PTHH
tính lớn)
và lực quán
tính
là
đầu
vào
cho
bài
toán
phân
tích,
kiểm
tra
kết
cấu
bằng
phương
pháp
PTHH.
toán, kiểm tra bền hệ thống kết cấu giàn khoan tự nâng (bao gồm kết cấu thân, kết cấu Mô
hình tổng
thể theo
phương
phápvà
PTHH
đượctiết
sử liên
dụngkết
trong
báovà
đã chân)
thay thế
các trạng
mô hình
chân,
kết cấu
đế chân
các chi
giữabàithân
trong
tháitính
di toán
chuyển
mô kết
hìnhcấu
tổng
Các kết
quả của
PTB
sóngquyết
lên trọn
truyền thống
vớibằng
mô hình
thânthể.
là tương
đương.
Nhờphương
mô hìnhpháp
PTHH,
bàinhư
báo lực
đã giải
vẹn bài toán bền của thân trong trạng thái di chuyển.
Bài toán kết hợp giữa PTB và PTHH để kiểm tra11bền hệ thống kết cấu nổi kích thước lớn của giàn
khoan tự nâng 400 ft trong trạng thái di chuyển theo sơ đồ thuật toán như Hình 6 của bài báo này
đã được giải quyết với sự trợ giúp của chương trình phần mềm chuyên dụng ANSYS/AQWA, là phần
mềm tính toán bản quyền thuộc Viện Xây dựng Công trình biển.
Các nghiên cứu tiếp theo sẽ đi sâu nghiên cứu phân tích sự làm việc của hệ thống kết cấu giàn
khoan tự nâng 400 ft trong các trạng thái khai thác, trạng thái biển cực hạn và trạng thái nâng hạ để
đi đến kết luận về độ an toàn của hệ thống kết cấu giàn khoan tự nâng 400 ft trong điều kiện biển
Việt Nam.
Lời cảm ơn
Nhóm tác giả chân thành cảm ơn sự hỗ trợ tài chính của đề tài khoa học cấp Nhà nước, mã số
SPQG02b.01-01.
Tài liệu tham khảo
[1] DnV-RP-C104 (2012). Self-elevating units. Det Norske Veritas.
[2] ABS MODU Rule (2001). ABS rules for building and classing mobile offshore drilling units. American
Bureau of Shipping.
[3] Ansys Inc (2013). Aqwa theory manual. Release 15.0.
18
Cường, Đ. Q và cs. / Tạp chí Khoa học Công nghệ Xây dựng
[4] Newman, J. N. (1978). Advances in applied mechanics, volume 18. Academic Press, New York.
[5] Bentley systems, Inc (2012). SACs User manual. Version 7.0.
[6] Friede and Goldman LTD (2013). F&G JU-2000E Jackup drilling rig specification and JU2000E Weight
control report. Houston, Texas, USA.
[7] API-RP-2A-WSD. 22th Edition (2014). Recommended practice for planning, designing and constructing
fixed offshore platforms–working stress design. American Petroleum Institue.
[8] DnV-RP-C201 (2010). Buckling strength of plated structures. Det Norske Veritas.
19