Giáo trình Điều khiển thủy lực I Nghề: Cơ điện tử CĐ Nghề Công Nghiệp Hà Nội
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (10.47 MB, 126 trang )
TRƯỜNG CAO ĐẲNG NGHỀ CÔNG NGHIỆP HÀ NỘI
Chủ biên: VƯƠNG THÀNH LONG
GIÁO TRÌNH
ĐIỀU KHIỂN THỦY LỰC I
(Lưu hành nội bộ)
Nghề: CƠ ĐIỆN TỬ
LỜI NÓI ĐẦU
Cùng sự phát triển không ngừng của lĩnh vực tự động hóa, ngày nay các
thiết bị truyền dẫn, điều khiển thủy lực sử dụng trong máy móc trở nên rộng
rãi ở hầu hết các lĩnh vực công nghiệp như máy công cụ CNC, phương tiện vận
chuyển, máy dập, máy xây dựng, máy ép phun, máy bay, tàu thủy, dây chuyền
chế biến thực phẩm,… do những thiết bị này làm việc linh hoạt, điều khiển tối
ưu, đảm bảo chính xác , công suất lớn với kích thước nhỏ gọn và lắp đặt dễ dàng
ở những không gian chật hẹp so với các thiết bị truyền động và điều khiển bằng cơ
khí hay điện.
Nhằm trang bị cho sình viên trình độ cao đẳng nghề điện công nghiệp và cơ
điện tử nói riêng và bạn đọc nói chung tiếp cận với nền kiến thức tốt nhất để tiếp
cận nhanh chóng với các thiết bị của hệ thống điều khiển điện - thủy lực trong thực
tế. Bằng những kinh nghiệm và tham khảo tại liệu cùng các bạn đồng nghiệp,
nhóm tác đã biên soạn giáo trình này.
Giáo trình “Điều khiển thủy lựcI” được nhóm tác giả tổng hợp từ những
kiến thức cơ bản của các lĩnh vực liên quan. Hy vọng qua nội dung của giáo
trình giúp cho sinh viên có thể tính toán, thiết kế, lắp đặt và điều khiển được
một hệ thống truyền dẫn thủy lực theo các yêu cầu khác nhau.
Trong quá trình biên soạn giáo trình này, không thể tránh khỏi những
thiếu sót. Rất mong sự đóng góp của các độc giả gần xa.
Ngày
tháng
năm
Nhóm tác giả
MỤC LỤC
MỤC LỤC ............................................................................................................................................................ 3
LỜI NÓI ĐẦU ..................................................................................................................................................... 2
Bài 1. CƠ SỞ LÝ THUYẾT VỀ THỦY LỰC....................................................................................................... 8
1.1. Khái niệm chung về thủy lực ....................................................................................................................... 8
1.2. Những ưu điểm và nhược điểm của hệ thống truyền động bằng thủy lực...................................................... 8
1.2.1. Ưu điểm .............................................................................................................................................. 8
1.2.2. Nhược điểm ........................................................................................................................................ 8
1.3. Định luật của chất lỏng ............................................................................................................................... 9
1.3.1. Áp suất thủy tĩnh ................................................................................................................................ 9
1.3.2. Phương trình dòng chảy liên tục ...................................................................................................... 10
1.3.3. Phương trình Bernulli ...................................................................................................................... 10
1.4. Đơn vị đo các đại lượng cơ bản (Hệ mét) ................................................................................................ 10
1.4.1. áp suất (p) ......................................................................................................................................... 10
1.4.2. Vận tốc (v) ........................................................................................................................................ 12
1.4.3. Thể tích và lưu lượng ....................................................................................................................... 12
1.4.4. Lực (F) .............................................................................................................................................. 12
1.4.5. Công suất (N).................................................................................................................................... 13
1.5. Tổn thất trong hệ thống truyền động bằng thủy lực .............................................................................. 14
1.5.1. Tổn thất thể tích ............................................................................................................................... 14
1.5.2. Tổn thất cơ khí ................................................................................................................................. 14
1.5.3. Tổn thất áp suất ............................................................................................................................... 15
1.5.4. Ảnh hưởng các thông số hình học đến tổn thất áp suất .................................................................. 15
1.6. độ nhớt và yêu cầu đối với dầu thủy lực .................................................................................................... 18
1.6.1. Độ nhớt ............................................................................................................................................. 18
1.6.2. Yêu cầu đối với dầu thủy lực .................................................................................................................. 19
Bài 2 : BƠM THỦY LỰC VÀ THIẾT BỊ XỬ LÝ THỦY LỰC ........................................................................... 20
2.1. Bơm thủy lực (Motor hydraulics) .............................................................................................................. 20
2.1.1. Nguyên lý chuyển đổi năng lượng .................................................................................................... 20
2.1.2. Các đại lượng đặc trưng................................................................................................................... 20
2.1.3. Công thức tính toán bơm ................................................................................................................. 21
2.1.4. Các loại bơm ..................................................................................................................................... 22
2.1.5. Bơm bánh răng ................................................................................................................................. 24
2.1.6. Bơm trục vít...................................................................................................................................... 26
2.1.7. Bơm cánh gạt .................................................................................................................................... 27
2.1.8. Bơm pittông ...................................................................................................................................... 28
2.1.9. Tiêu chuẩn chọn bơm ....................................................................................................................... 30
2.2. BÓ dÇu .............................................................................................................................................. 31
2.2.1. NhiÖm vô ................................................................................................................................. 31
2.2.2. Chọn kích thước bể dầu ................................................................................................................... 31
2.2.3. KÕt cÊu cña bÓ dÇu........................................................................................................... 31
2.3. bé läc dÇu ..................................................................................................................................... 32
2.3.1. NhiÖm vô ................................................................................................................................. 32
2.3.2. Ph©n lo¹i theo kÝch thưíc läc ................................................................................. 32
2.4.3. Ph©n lo¹i theo kÕt cÊu ................................................................................................. 33
2.4. Đo áp suất và lưu lượng ............................................................................................................................ 34
2.4.1. Đo áp suất ......................................................................................................................................... 34
2.4.2. Đo lưu lượng ..................................................................................................................................... 36
2.6. Bình trích chứa ......................................................................................................................................... 37
2.6.1. Nhiệm vụ........................................................................................................................................... 37
2.6.2. Phân loại ........................................................................................................................................... 37
BÀI 3. CƠ CẤU CHẤP HÀNH ........................................................................................................................... 41
3.1 Xilanh thủy lực .......................................................................................................................................... 41
3.1.2. Xy lanh tác động kép. ....................................................................................................................... 42
3.1.3. Xy lanh quay .................................................................................................................................... 44
3.2 Động cơ thủy lực. ...................................................................................................................................... 46
BÀI 4. CÁC PHẦN TỬ ĐIỀU KHIỂN CỦA HỆ THỐNG THỦY LỰC .............................................................. 46
4.1. Khái niệm ................................................................................................................................................. 46
4.2. Van áp suất ............................................................................................................................................... 46
4.2.1. Nhiệm vụ........................................................................................................................................... 46
4.2.2. Phân loại ........................................................................................................................................... 46
4.2.3. Và an toàn (pressure relief valve) .................................................................................................... 48
4.2.4. Van cản ............................................................................................................................................. 50
4.3 Van đảo chiều ............................................................................................................................................ 51
4.3.1. Nhiệm vụ........................................................................................................................................... 51
4.3.2. Các khái niệm ................................................................................................................................... 51
4.3.3. Nguyên lý làm việc ........................................................................................................................... 52
4.4. Các loại van điện thủy lực ứng dụng trong mạch điều khiển tự động ................................................... 53
4.4.1. Phân loại ........................................................................................................................................... 53
4.4.2. Công dụng ........................................................................................................................................ 53
4.4.3. Van solenoid ..................................................................................................................................... 53
4.5.4. Van tỷ lệ ............................................................................................................................................ 54
4.4.5. Van servo .......................................................................................................................................... 55
4.4.5. Van servo .......................................................................................................................................... 56
4.5. Van tiết lưu ............................................................................................................................................... 57
4.6. Van chặn .................................................................................................................................................. 58
4.7. ống dẫn, ống nối ....................................................................................................................................... 59
4.7.1. ống dẫn ............................................................................................................................................. 59
4.7.2. Các loại ống nối ................................................................................................................................ 59
4.7.3. Vòng chắn ......................................................................................................................................... 60
Bài 5 Điều chỉnh và ổn định vận tốc .................................................................................................................... 61
5.1. Điều chỉnh bằng tiết lưu ............................................................................................................................ 61
5.1.1. Điều chỉnh bằng tiết lưu ở đường vào .............................................................................................. 61
5.1.2. §iÒu chØnh b»ng tiÕt lưu ë ®ưêng ra ................................................................... 63
5.2. Điều chỉnh bằng thể tích ........................................................................................................................... 64
5.3. ổn định vận tốc ......................................................................................................................................... 65
5.3.1. Bộ ổn tốc lắp trên đường vào của cơ cấu chấp hành ....................................................................... 66
5.3.2. Bộ ổn tốc lắp trên đường ra của cơ cấu chấp hành ......................................................................... 67
5.3.3. ổn định tốc độ khi điều chỉnh bằng thể tích kết hợp với tiết lưu ở đường vào ............................... 68
Bài 6: CƠ SỞ LÝ THUYẾT ĐIỀU KHIỂN BẰNG THỦY LỰC .................................................................... 70
6.1. Khái niệm cơ bản về điều khiển ................................................................................................................ 70
6.1.1. Hệ thống điều khiển ........................................................................................................................... 70
6.1.2. Các loại tín hiệu điều khiển............................................................................................................... 71
6.1.3. Điều khiển vòng hở (mạch điều khiển hở) .......................................................................................... 71
6.1.4. Điều khiển vòng kín (Mạch điều khiển có khâu phản hồi) ................................................................. 71
6.2. Các phần tử logic: ................................................................................................................................... 72
6.2.1. Phần tử logic NOT ( phủ định) : ......................................................................................................... 72
6.2.2. Phần tử logic AND (và)........................................................................................................................ 72
6.2.3. Phần tử logic NAND (NOT – AND) ..................................................................................................... 73
6.2.4. Phần tử logic OR ................................................................................................................................. 73
6.2.5. Phần tử logic NOR............................................................................................................................... 74
6.2.6. Phần tử logic XOR (EXC-OR) ............................................................................................................. 74
6.2.7. Phần tử logic X-NOR.......................................................................................................................... 75
6.3. Lý thuyết đại số Boole............................................................................................................................... 75
6.3.1. Quy tắc cơ bản của đại số Boole. ........................................................................................................ 75
6.3.2. Biểu đồ Karnaugh .............................................................................................................................. 76
6.3.3. Phần tử nhớ ......................................................................................................................................... 77
6.4. Biểu diễn phần tử logic của thủy lực. ........................................................................................................ 79
6.4.1. Phần tử NOT. ..................................................................................................................................... 79
6.4.3. Phần tử NOR: .................................................................................................................................... 80
6.4.4. Phần tử AND: .................................................................................................................................... 81
6.4.5. Phần tử NAND:.................................................................................................................................. 81
6.4.6. Phần tử EXC - OR: ............................................................................................................................ 82
Bài 7. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN BẰNG ĐIỆN – THỦY LỰC. ................................................ 83
7.1. Biểu diễn chức năng của quá trình điều khiển ............................................................................................ 83
7.1.1. Biểu đồ trạng thái: .............................................................................................................................. 83
7.1.3. Lưu đồ tiến trình: ............................................................................................................................... 88
7.2. Phân loại phương pháp điều khiển ......................................................................................................... 89
7.2.1. Điều khiển bằng tay ........................................................................................................................... 90
7.2.2. Điều khiển tùy động theo thời gian: .................................................................................................... 91
7.2.3. Điều khiển tùy động theo hành trình ................................................................................................... 93
7.3. Các phần tử điện – thủy lực ....................................................................................................................... 95
7.3.1. Các van đảo chiều bằng nam châm điện.............................................................................................. 96
7.4. Thiết kế mạch điều khiển điện – thủy lực ............................................................................................ 102
7.4.1. Nguyên tắc thiết kế........................................................................................................................... 102
7.4.2. Mạch dạng xung. ............................................................................................................................ 103
7.4.3.
Mạch trigơ một trạng thái bền: .................................................................................................... 104
7.4.4. Mạch điện điều khiển điện khí nén với một xy lanh .......................................................................... 106
7.4.5. Mạch điện điều khiển điện khí nén với hai xy lanh............................................................................ 107
7.4.6. Bộ dịch chuyển theo nhịp ................................................................................................................. 110
7.5. Mạch tổng hợp dịch chuyển theo nhịp ..................................................................................................... 111
7.5.1. Mạch điều khiển với chu kỳ đồng thời .............................................................................................. 111
7.5.2. Mạch điều khiển với chu kỳ thực hiện tuần tự................................................................................... 112
7.6. Thiết kế mạch điều khiển khí nén theo biểu đồ Karnaugh. ....................................................................... 112
7.7. Các mạch ứng dụng. ................................................................................................................................... 119
7.7.1. Cơ cấu kẹp chặt chi tiết gia công .......................................................................................................... 119
7.7.2. Máy dập thủy lực điều khiển bằng tay .......................................................................................... 121
7.7.3. Cơ cấu nâng hạ chi tiết sơn trong lò sấy. ....................................................................................... 121
7.7.4. Máy khoan bàn. .............................................................................................................................. 122
7.7.5. Thiết bị khoan tự động ................................................................................................................... 124
Bài 1.
CƠ SỞ LÝ THUYẾT VỀ THỦY LỰC
1.1. Khái niệm chung về thủy lực
Thuỷ lực, là ngành khoa học về truyền lực và chuyển động trong trong môi trường
chất lỏng giới hạn, chất lỏng giới hạn. Đây chỉ là phạm vi hẹp trong thuỷ lực, bởi vì thủy
lực bao quát mọi nghiên cứu và ứng dụng chuyển động của chất lỏng từ hệ thống tưới tiêu
đến các hệ thống thủy lực công nghiệp. Thủy lực đã được loài người ứng dụng từ thời kỳ
Hy Lạp cổ đại. Tên gọi hydrau-líc(thủy lực) xuất phát từ tiếng Hy Lạp “Hydros”, có ý
nghĩa là nước.
Trươc công nguyên, nhà khoa học Archimedes đã phát minh ra thiết bị dùng để
bơm nước. Guồng nước Archimedes, gồm ống và vít xoắn quay để tải nước, để tải nước,
Ngày nay vẫn được vẫn được sử dụng trong hệ thống thoát nước ở châu Âu. Gần với thời
kỳ Archimedes cũng chế tạo tua-bin sơ để khai thác nguồn năng lượng của chất lỏng
chuyền động. Tuy nhiên, bánh xe nước hình thức của tua – bin sơ khai, có lẽ đã có từ
5000 năm trước ở Trung Hoa và Ai Cập.
Vào thời kỳ phục hưng Leonardo Da Vince đã có những sáng chế quan trọng về
các máy móc họat động dựa trên dòng chảy, mạc dầu ông chưa có khái niệm về áp suất.
Hơn một trăm năm sau, Evange Lista Torricelli đã quan sát nguyên lý của khí áp
kế thủy ngân va liên quan với trọng lượng của khí quyển. Dựa trên những khám phác của
Torricelli, nhà khoa học ngừoi Pháp, Blaise Pascal đã tìm ra nguyên lý đòn bẩy thủy lực
đã phát triển trong vài trăm năm. Ứng dụng công nghiệp đầu tiên của thủy lực vao năm
1795, khi ma Joseph Bramah phát minh ra máy ép thủy lực đầu tiên. Sử dụng nước làm
môi chất thủy lực và áp dụng định luật Pascal để đạt được lực cơ học lớn, được khuyếch
đại nhiều lần.
1.2. Những ưu điểm và nhược điểm của hệ thống truyền động bằng thủy lực
1.2.1. Ưu điểm
+/ Truyền động được công suất cao và lực lớn, (nhờ các cơ cấu tương đối đơn giản,
hoạt động với độ tin cậy cao nhưng đòi hỏi ít về chăm sóc, bảo dưỡng).
+/ Điều chỉnh được vận tốc làm việc tinh và vô cấp, (dễ thực hiện tự động hoá theo
điều kiện làm việc hay theo chương trình có sẵn).
+/ Kết cấu gọn nhẹ, vị trí của các phần tử dẫn và bị dẫn không lệ thuộc nhau.
+/ Có khả năng giảm khối lượng và kích thước nhờ chọn áp suất thủy lực cao.
+/ Nhờ quán tính nhỏ của bơm và động cơ thủy lực, nhờ tính chịu nén của dầu nên có
thể sử dụng ở vận tốc cao mà không sợ bị va đập mạnh (như trong cơ khí và điện).
+/ Dễ biến đổi chuyển động quay của động cơ thành chuyển động tịnh tiến của cơ cấu
chấp hành.
+/ Dễ đề phòng quá tải nhờ van an toàn.
+/ Dễ theo dõi và quan sát bằng áp kế, kể cả các hệ phức tạp, nhiều mạch.
+/ Tự động hoá đơn giản, kể cả các thiết bị phức tạp, bằng cách dùng các phần tử tiêu
chuẩn hoá.
1.2.2. Nhược điểm
+/ Mất mát trong đường ống dẫn và rò rỉ bên trong các phần tử, làm giảm hiệu suất và
hạn chế phạm vi sử dụng.
+/ Khó giữ được vận tốc không đổi khi phụ tải thay đổi do tính nén được của chất
lỏng và tính đàn hồi của đường ống dẫn.
+/ Khi mới khởi động, nhiệt độ của hệ thống chưa ổn định, vận tốc làm việc thay đổi
do độ nhớt của chất lỏng thay đổi.
1.3. Định luật của chất lỏng
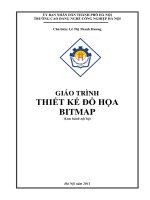
1.3.1. Áp suất thủy tĩnh
Trong chất lỏng, áp suất (do trọng lượng và ngoại lực) tác dụng lên mỗi phần tử chất
lỏng không phụ thuộc vào hình dạng thùng chứa.
Hình 1.1. Áp suất thủy tĩnh
Ta có:
Hình a: pS = h.g. r + pL
(1.1)
=
(1.2)
Hình b:
Hình c:P =
=
Và
=
=
Trong đó:
r- khối lượng riêng của chất lỏng;
h- chiều cao của cột nước;
g- gia tốc trọng trường;
pS- áp suất do lực trọng trường;
pL- áp suất khí quyển;
pF- áp suất của tải trọng ngoài;
A, A1, A2- diện tích bề mặt tiếp xúc;
F- tải trọng ngoài.
(1.3)
1.3.2. Phương trình dòng chảy liên tục
Lưu lượng (Q) chảy trong đường ống từ vị trí (1) đến vị trí (2) là không đổi (const).
Lưu lượng Q của chất lỏng qua mặt cắt A của ống bằng nhau trong toàn ống (điều kiện
liên tục).
Ta có phương trình dòng chảy như sau:
Q = A.v = hằng số (const)
(1.4)
Với v là vận tốc chảy trung bình qua mặt cắt A.
Nếu tiết diện chảy là hình tròn, ta có:
Q1 = Q2 hay v1.A1 = v2.A2
(1.5)
↔v
= v
Vận tốc chảy tại vị trí 2:
(1.6)
v =v
(1.7)
Trong đó:
3
2
Hình 1.2. Dòng chảy liên tục
Q1[m /s], v1[m/s], A1[m ], d1[m] lần lượt là lưu lượng dòng chảy, vận tốc dòng
chảy, tiết diện dòng chảy và đường kính ống tại vị trí 1;
3
2
Q2[m /s], v2[m/s], A2[m ], d2[m] lần lượt là lưu lượng dòng chảy, vận tốc dòng
chảy, tiết diện dòng chảy và đường kính ống tại vị trí 2.
1.3.3. Phương trình Bernulli
Theo hình 1.3 ta có áp suất tại một điểm chất lỏng
đang chảy:
P + ρ. g. h +
= P + ρ. g. h +
= const (1.8)
Trong đó:
P + ρ. g. h ;P + ρ. g. h : Áp suất thủy tĩnh,
ρ
ρ
; : Áp suất thủy động,
= . : Trọng lượng riêng.
1.4. Đơn vị đo các đại lượng cơ bản (Hệ mét)
1.4.1. áp suất (p)
Theo đơn vị đo lường SI là Pascal (pa)
2
-1
-2
2
1pa = 1N/m = 1m kgs = 1kg/ms
2
2
Đơn vị này khá nhỏ, nên người ta thường dùng đơn vị: N/mm , N/cm và so với đơn
2
vị áp suất củ là kg/cm thì nó có mối liên hệ như sau:
2
2
2
5
2
1kg/cm ≈ 0.1N/mm = 10N/cm = 10 N/m
2
2
2
(Trị số chính xác: 1kg/cm = 9,8N/cm ; nhưng để dàng tính toán, ta lấy 1kg/cm =
2
10N/cm ).
Ngoài ra ta còn dùng:
5
2
2
1bar = 10 N/m = 1kg/cm
4
2
5
2
1at = 9,81.10 N/m ≈ 10 N/m = 1bar.
2
(Theo DIN- tiêu chuẩn Cộng hòa Liên bang Đức thì 1kp/cm = 0,980665bar ≈
2
2
2
0,981bar; 1bar ≈ 1,02kp/cm . Đơn vị kG/cm tương đương kp/cm ).
Ngoài ra một số nước (Anh, Mỹ) còn sử dụng đơn vị đo áp suất
Bảng 1.1. Biểu thị mối tương quan của các đơn vị đo áp suất khác nhau
Áp Suất
Pa
bar
1Pa
1
1,000
.
10-5
1
2
1N/m
1 bar
1 mbar
1,000.
10-5
1,000.10
2
1at
1kp/cm2
1mmW
S
1kp/m2
1mmHg
1Torr
0,981.10
1psi
6,895.
103
1,000
.
10-3
0,981
Bảng 1.1
mbar
at
mmWS
2
kp/cm
kp/m2
1,000.
1.02.10
0,102
-5
-3
10
Torr
mmHg
7,05.10-
1,02
1,02.104
0,75.103
1,02.10
1,02.10
0,75
1,000.
10-3
1
1
5
9,81
1,33.102
1,013.
105
1,000.10
4
atm
1,45
3
-3
9,81.102
Psi
1,45.1
0
1,45.
10-2
7,36.102 1,42.
10-2
7,36.
1,42.
-2
10
10-3
0,98
7
0,98
7
.10-3
0,98
7
9,68.
10-5
0,981
.
10-4
1,33.
10-3
0,981.
10-2
1,000.
10-4
1
1,33
1,36.
10-3
1,36.10
1
1,934.
10-2
1,32.
10-3
6,895
.
10-2
1,013
6,895.10
7,033.
10-2
7,033.
102
5,171.1
0
1
1,031.10
1,033
1,033.
104
7,6.102
1,469.
10-2
6,80
5
.10-2
1
3
1.4.2. Vận tốc (v)
Đơn vị vận tốc là m/s (cm/s).
1.4.3. Thể tích và lưu lượng
3
a. Thể tích (V): m hoặc lít(l)
3
b. Lưu lượng (Q): m /phút hoặc l/phút.
Trong cơ cấu biến đổi năng lượng dầu ép (bơm dầu, động cơ dầu) cũng có thể dùng đơn
3
vị là m /vòng hoặc l/vòng.
1.4.4. Lực (F)
Đơn vị lực là Newton (N)
2
1N = 1kg.m/s .
Ngoài đơn vị Newton (N), người ta còn sử dụng một số đơn vị khác về lực (bảng 1.2)
theo DIN (đơn vị kG tương đương với kp)
Bảng 1.2
N
dyn
kp
Mp
p
5
-4
1
10
0,102
1,02.10
102
-5
-6
-9
10
1
1.02.10
1,02.10
1,02.10-3
5
-3
9,81
9,81.10
1
10
103
9,81.103
9,81.108
103
1
106
9,81.10-3
981
10-3
10-6
1
1.4.5. Công suất (N)
+ Công: Đơn vị của công l_ Joule (J). 1 Joule (J) l công sinh ra dưới tác động của lực
1
để vật dịch chuyển quãng đường 1m.
1J = 1Nm
1
1 =
Bảng1.3) biểu thị mối liên hệ giữa các đơn vị đo về công (đơn vị kGm tương đương
với kpm).
+ Công suất: Đơn vị công suất là Watt (W)
2
3
1W = 1Nm/s = 1m .kg/s .
(Bảng 1.4) biểu thị theo DIN mối liên hệ giữa đơn vị đo về công suất (đơn vị kGm/s
tương đương kpm/s: đơn vị mã lực CV tương đương với PS).
Bảng 1.4
1.5. Tổn thất trong hệ thống truyền động bằng thủy lực
Trong hệ thống thủy lực có các loại tổn thất sau:
1.5.1. Tổn thất thể tích
Loại tổn thất này do dầu thủy lực chảy qua các khe hở trong các phần tử của hệ thống
gây nên.
Nếu áp suất càng lớn, vận tốc càng nhỏ và độ nhớt càng nhỏ thì tổn thất thể tích càng
lớn.
Tổn thất thể tích đáng kể nhất là ở các cơ cấu biến đổi năng lượng (bơm dầu, động cơ
dầu, xilanh truyền lực)
Đối với bơm dầu: tổn thất thể tích được thể hiện bằng hiệu suất sau:
ηtb = Q/Q0
(1.9)
Q- Lưu lượng thực tế của bơm dầu;
Q0- Lưu lượng danh nghĩa của bơm.
Nếu lưu lượng chảy qua động cơ dầu là Q0đ và lưu lượng thực tế Qđ = qđ.ηđ thì hiệu
suất của đông cơ dầu là:
ηtđ = Q0đ/Qđ
(1.10)
Nếu như không kể đến lượng dầu dò ở các mối nối, ở các van thì tổn thất trong hệ
thống dầu ép có bơm dầu và động cơ dầu là:
ηt = ηtb. ηtđ
(1.11)
1.5.2. Tổn thất cơ khí
Tổn thất cơ khí là do ma sát giữa các chi tiết có chuyển động tương đối ở trong bơm
dầu và động cơ dầu gây nên.
Tổn thất cơ khí của bơm được biểu thị bằng hiệu suất cơ khí:
ηcb = N0/N
(1.12)
N0- Công suất cần thiết để quay bơm (công suất danh nghĩa), tức là công suất cần
thiết để đảm bảo lưu lượng Q và áp suất p của dầu, do đó:
N0 = p.Q/6.104 (kW)
(1.13)
N- Công suất thực tế đo được trên trục của bơm (do mômen xoắn trên trục).
4
Đối với dầu: N0đ = (p.Qđ)/6.10
(1.14)
Do đó: ηcđ = Nđ/N0đ
Từ đó, tổn thất cơ khí của hệ thống thủy lực là: ηc = ηcb. ηcđ
(1.15)
(1.16)
1.5.3. Tổn thất áp suất
Tổn thất áp suất là sự giảm áp suất do lực cản trên đường chuyển động của dầu từ
bơm đến cơ cấu chấp hành (động cơ đầu, xilanh truyền lực).
Tổn thất này phụ thuộc vào các yếu tố sau:
+/ Chiều dài ống dẫn
+/ Độ nhẵn thành ống
+/ Độ lớn tiết diện ống dẫn
+/ Tốc độ chảy
+/ Sự thay đổi tiết diện
+/ Sự thay đổi hướng chuyển động
+/ Trọng lượng riêng, độ nhớt.
Nếu p0 là áp suất của hệ thống, p1 là áp suất ra, thì tổn thất được biểu thị bằng hiệu
suất:
ư
∆
=
=
(1.17)
Hiệu áp ∆p là trị số tổn thất áp suất.
Tổn thất áp suất do lực cản cục bộ gây nên được tính theo công thức sau:
ρ
ρ
∆P = 10. x. v
= 10ư . x. v [bar]
Trong đó:
3
ρ- khối lượng riêng của dầu (914kg/m );
2
g- gia tốc trọng trường (9,81m/s );
v- vận tốc trung bình của dầu (m/s);
ξ- hệ số tổn thất cục bộ;
l- chiều dài ống dẫn;
d- đường kính ống.
1.5.4. Ảnh hưởng các thông số hình học đến tổn thất áp suất
a. Tiết diện dạng tròn
Nếu ta gọi:
∆p- Tổn thất áp suất;
l- Chiều dài ống dẫn;
ρ - Khối lượng riêng của chất lỏng;
Q- Lưu lượng;
D- Đường kính;
v- Độ nhớt động học;
l- Hệ số ma sát của ống;
(1.18)
λLAM- Hệ số ma sát đối với chảy tầng;
λTURB- Hệ số ma sát đối với chảy rối.
Tổn thất.
∆ =
l=l
l
ρ
l.
ư
l=l
,
. .
Số Reynold: .
> 3000
.
b. Tiết diện thay đổi lớn đột ngột.
Tổn thất: ∆ = 1ư
.
.
Trong đó:
D1- đường kính ống dẫn vào;
D2- đường kính ống dẫn ra.
c. Tiết diện nhỏ đột ngột
Tổn thất: ∆ = 0,5. 1ư
.
.
Trong đó:
D1- Đường kính ống dẫn ra;
D2- Đường kính ống dẫn vào.
d. Tiết diện thay đổi lớn từ từ
Tổn thất: ∆ = [0,12 ÷ 0,2]. 1ư
e. Tiết diện nhỏ từ từ
Tổn thất: Δp = 0
.
.
f. Vào ông dẫn
Tổn thất áp suất được tính theo công thức sau:
∆ =x . .
Trong đó hệ số thất thoát x được chia thành hai trường hợp như ở bảng sau:
C¹nh
HÖ sè thÊt
tho¸t x
a
b
S¾c
G·y khóc
Trßn
Cã trưíc
g. Ra ống dẫn
Tổn thất áp suất được tính theo công thức sau:
∆ =x .
4
.
.
.
< 3000
Hệ số thất thoát x
2
0,5
0,25
0,06
< 3
4
.
1
> 3000
.
h. ống dẫn gãy khúc
≈4
∆ =x .
.
Góc α, β
Hệ số thất
thoát x
α = 20
0,06
α = 40
0,2
α = 60
0,47
i. Tổn thất áp suất ở van
k. Tổn thất trong hệ thống thủy lực
1.6. độ nhớt và yêu cầu đối với dầu thủy lực
1.6.1. Độ nhớt
Độ nhớt là một trong những tính chất quan trọng nhất của
chất lỏng. Độ nhớt xác định ma sát trong bản thân chất lỏng
và thể hiện khả năng chống biến dạng trượt hoặc biến dạng
cắt của chất lỏng. Có hai loại độ nhớt:
a. §é nhít ®éng lùc
Độ nhớt động lực là lực ma sát tính bằng 1N tác động trên một đơn vị diện tích bề
2
mặt 1m của hai lớp phẳng song song với dòng chảy của chất lỏng, cách nhau 1m và có
vận tốc 1m/s.
Độ nhớt động lực được tính bằng [Pa.s]. Ngoài ra, người ta còn dùng đơn vị poazo
(poiseuille), viết tắt là P.
2
1P = 0,1N.s/m = 0,010193kG.s/m2
1P = 100cP (centipoiseuilles)
Trong tính toán kỹ thuật thương số quy tròn:
2
1P = 0,0102kG.s/m
b. Độ nhớt động.
§é nhít ®éng là tû sè gi÷a hÖ sè nhít ®éng lùc η víi khèi
lưîng riªng ρ cña chÊt láng:
=
r
Đơn vị độ nhớt động là [m /s]. Ngoài ra, người ta còn dùng đơn vị stốc ( Stoke), viết tắt là
St hoặc centistokes, viết tắt là cSt.
2
-4 2
1St = 1cm /s = 10 m /s
-2
2
1cSt = 10 St = 1mm /s.
c. Độ nhớt Engler (E0)
0
Độ nhớt Engler (E ) là một tỷ số quy ước dùng để so sánh thời gian chảy 200cm3
3
dầu qua ống dẫn có đường kính 2,8mm với thời gian chảy của 200cm nước cất ở nhiệt độ
0
0
20 C qua ống dẫn có cùng đường kính, ký hiệu: E = t/tn
Độ nhớt Engler thường được đo khi đầu ở nhiệt độ 20, 50, 1000C và ký hiệu tương
ứng với nó: E020, E050, E0100.
1.6.2. Yêu cầu đối với dầu thủy lực
Những chỉ tiêu cơ bản để đánh giá chất lượng chất lỏng làm việc là độ nhớt, khả
năng chịu nhiệt, độ ổn định tính chất hoá học và tính chất vật lý, tính chống rỉ, tính ăn các
chi tiết cao su, khả năng bôi trơn, tính sủi bọt, nhiệt độ bắt lữa, nhiệt độ đông đặc.
Chất lỏng làm việc phải đảm bảo các yêu cầu sau:
+/ Có khả năng bôi trơn tốt trong khoảng thay đổi lớn nhiệt độ và áp suất;
+/ Độ nhớt ít phụ thuộc vào nhiệt độ;
+/ Có tính trung hoà (tính trơ) với các bề mặt kim loại, hạn chế được khả năng xâm
nhập của khí, nhưng dễ dàng tách khí ra;
+/ Phải có độ nhớt thích ứng với điều kiện chắn khít và khe hở của các chi tiết di
trượt, nhằm đảm bảo độ rò dầu bé nhất, cũng như tæn thÊt ma s¸t Ýt nhÊt;
+/ Dầu phải ít sủi bọt, ít bốc hơi khi làm việc, ít hoà tan trong nước và không khí, dẫn
nhiệt tốt, có môđun đàn hồi, hệ số nở nhiệt và khối lượng riêng nhỏ.
Trong những yêu cầu trên, dầu khoáng chất thoả mãn được đầy đủ nhất.
Bài 2 : BƠM THỦY LỰC VÀ THIẾT BỊ XỬ LÝ THỦY LỰC
2.1. Bơm thủy lực (Motor hydraulics)
2.1.1. Nguyên lý chuyển đổi năng lượng
Bơm dầu: là một cơ cấu biến đổi năng lượng, dùng để biến cơ năng thành năng lượng
của dầu (dòng chất lỏng). Trong hệ thống dầu ép thường chỉ dùng bơm thể tích, tức là loại
bơm thực hiện việc biến đổi năng lượng bằng cách thay đổi thể tích các buồng làm việc,
khi thể tích của buồng làm việc tăng, bơm hút dầu, thực hiện chu kỳ hút và khi thể tích
của buồng giảm, bơm đẩy dầu ra thực hiện chu kỳ nén.
Tùy thuộc vào lượng dầu do bơm đẩy ra trong một chu kỳ làm việc, ta có thể phân ra
hai loại bơm thể tích:
+/ Bơm có lưu lượng cố định, gọi tắt là bơm cố định.
+/ Bơm có lưu lượng có thể điều chỉnh, gọi tắt là bơm điều chỉnh.
Những thông số cơ bản của bơm là lưu lượng và áp suất.
2.1.2. Các đại lượng đặc trưng.
a. Thể tích dầu tải đi trong 1 vòng (hành trình)
Nếu ta gọi:
V- Thể tích dầu tải đi trong 1 vòng (hành trình)
A- Diện tích mặt cắt ngang;
h- Hành trình pittông;
VZL- Thể tích khoảng hở giữa hai răng;
Z- Số răng của bánh răng.
ở hình 2.1, ta có thể tích dầu tải đi trong 1 vòng (hành trình):
V = A.h 1 hành trình
V ≈ VZL.Z.2
(1 vòng)
b. áp suất làm việc
áp suất làm việc được biểu diễn trên hình 2.2. Trong đó:
+/ áp suất ổn định p1;
+/ áp suất cao p2;
+/ áp suất đỉnh p3 (áp suất qua van tràn).
c. Hiệu suất
Hiệu suất của bơm dầu phụ thuộc vào các yếu tố sau:
+/ Hiệu suất thể tích v
+/ Hiệu suất cơ và thủy lực hm
Như vậy hiệu suất toàn phần: t = v. hm
ở hình 2.3, ta có:
+/ Công suất động cơ điện: NE = ME. ΩE
+/ Công suất của bơm: N = p.Qv
Như vậy ta có công thức sau:
=
=
(2.1)
(2.2)
(2.3)
(2.4)
+/ Công suất của động cơ dầu:
NA = MA. ΩA hay NA = tMotor.p.Qv
(2.5)
+/ Công suất của xilanh:
NA = F.v hay NA = Ωtxilanh.p.Qv
(2.6)
Trong đó:
NE, ME, ΩE- công suất, mômen và vận tốc góc trên trục động cơ nối với bơm;
NA, MA, ΩA - công suất, mômen và vận tốc góc trên động cơ tải;
NA, F, v - công suất, lực và vận tốc pittông;
N, p, Qv - công suất, áp suất và lưu lượng dòng chảy;
txilanh- hiệu suất của xilanh;
tMotor- hiệu suất của động cơ dầu;
tb- hiệu suất của bơm dầu.
2.1.3. Công thức tính toán bơm
a. Lu lng Qv, s vũng quay n v th tớch du trong mt vũng quay V
Ta cú: Qv = n.V
(2.8)
-3
+/ Lu lng bm: Qv = n.V. v.10 (2.9)
+/ ng c du:
=
.
. 10
(2.10)
Trong ú:
Qv- lu lng [lớt/phỳt];
n- s vũng quay [vũng/phỳt];
3
V- th tớch du/vũng [cm /vũng];
v - hiu sut [%].
b. ỏp sut, mụmen xon, th tớch du trong mt vũng quay V
Theo nh lut Pascal ta cú:
=
(2.11)
p sut ca bm:
Trong ú:
p [bar];
Mx [N.m];
=
.
(2.12)
3
V [cm /vũng];
hm [%].
c. Cụng sut, ỏp sut, lu lng
Cụng sut ca bm tớnh theo cụng thc tng quỏt l: N = p.Qv (2.13)
+/ Cụng sut truyn ng bm:
=
.
.
. 10
(2.14)
Trong ú:
N [W], [kW];
2
p [bar], [N/m ];
3
Qv [lớt/phỳt], [m /s];
t [%].
Lu lợng của bơm về lý thuyết không phụ thuộc vo áp suất
(trừ bơm ly tâm), m chỉ phụ thuộc vo kích thớc hình học v
vận tốc quay của nó. Nhng trong thực tế do sự rò rỉ qua khe
hở giữa các khoang hút vo khoang đẩy, nên lu lợng thực tế
nhỏ hơn lu lợng lý thuyết v giảm dần khi áp suất tăng.
Một yếu tố gây mất mát năng lợng nữa l hiện tợng hỏng.
Hiện tợng ny thờng xuất hiện, khi ống hút quá nhỏ hoặc
dầu có độ nhớt cao.
Khi bộ lọc đặt trên đờng hút bị bẩn, cùng với sự tăng
sức cản của dòng chảy, lu lợng của bơm giảm dần, bơm lm
việc ngy một ồn v cuối cùng tắc hẳn. Bởi vậy cần phải lu
ý trong lúc lắp ráp lm sao để ống hút to, ngắn v thẳng.
2.1.4. Cỏc loi bm
a. Bơm với lưu lượng cố định
+/ Bơm bánh răng ăn khớp ngoài;
+/ Bơm bánh răng ăn khớp trong;
+/ Bơm pittông hướng trục;
+/ Bơm trục vít;
+/ Bơm pittông dãy;
+/ Bơm cánh gạt kép;
+/ Bơm rôto.
b. Bơm với lưu lượng thay đổi
+/ Bơm pittông hướng tâm;
+/ Bơm pittông hướng trục (truyền bằng đĩa nghiêng);
+/ Bơm pittông hướng trục (truyền bằng khớp cầu);
+/ Bơm cánh gạt đơn.
2.1.5. Bm bỏnh rng
2.1.5.1. Cu to
2.1.5.2. Nguyờn lý lm vic.
Nguyên lý lm việc của bơm bánh răng l thay đổi thể
tích: khi thể tích của buồng hút A tăng, bơm hút dầu, thực
hiện chu kỳ hút; v nén khi thể tích giảm, bơm đẩy dầu ra ở
buồng B, thực hiện chu kỳ nén. Nếu nh trên đờng dầu bị đẩy
ra ta đặt một vật cản (ví dụ nh van), dầu bị chặn sẽ tạo
nên một áp suất nhất định phụ thuộc vo độ lớn của sức cản
v kết cấu của bơm.
2.1.5.3. Phân loại
Bm bỏnh rng l loi bm dựng rng rói nht vỡ nú cú kt cu n gin, d ch to.
Phm vi s dng ca bm bỏnh rng ch yu nhng h thng cú ỏp sut nh trờn cỏc
mỏy khoan, doa, bo, phay, mỏy t hp,.... Phm vi ỏp sut s dng ca bm bỏnh rng
hin nay cú th t 10 ữ 200bar (ph thuc vo chớnh xỏc ch to).
Bm bỏnh rng gm cú: loi bỏnh rng n khp ngoi hoc n khp trong, cú th l
rng thng, rng nghiờng hoc rng ch V.
Loi bỏnh rng n khp ngoi c dựng rng rói hn vỡ ch to d hn, nhng bỏnh
rng n khp trong thỡ cú kớch thc gn nh hn.
c. Lưu lượng bơm bánh răng
Khi tính lưu lượng dầu, ta coi thể tích dầu được đẩy ra khỏi rónh răng bằng với thể
tích của răng, tức là không tính đến khe hở chõn răng và lấy hai bánh răng cú kích thước
như nhau. (Lưu lượng của bơm phụ thuộc vào kết cấu)
Nếu ta đặt:
m- Modul của bánh răng [cm];
d- Đường kính chia bánh răng [cm];
b- Bề rộng bánh răng [cm];
n- Số vũng quay trong một phỳt [vũng/phỳt];
Z - Số răng (hai bánh răng cú số răng bằng nhau).
Thỡ lượng dầu do hai bánh răng chuyển đi khi nú quay một vũng:
3
Qv = 2.π.d.m.b [cm /vũng] hoặc [l/ph]
(2.15)
Nếu gọi Z là số răng, tính đến hiệu suất thể tích ηt của bơm và số vũng quay n, thỡ lưu
lượng của bơm bánh răng sẽ là:
2
3
Qb = 2.π.Z.m .b.n. ηt [cm /phỳt] hoặc [l/ph]
(2.16)
ηt = 0,76 ÷ 0,88 hiệu suất của bơm bánh răng