Tìm hiểu về mô hình robot người
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.23 MB, 34 trang )
HUMANOID ROBOT
1. GIỚI THIỆU:
Robot di chuyển bằng bánh xe được nghiên cứu và chế tạo
nhiều nhưng loại robot này gặp nhiều khó khăn trong khi di chuyển
trên những địa hình có bề mặt phức tạp. Trong khi đó, robot di
chuyển bằng hai chân di chuyển trên những địa hình có bề mặt phức
tạp rất dễ dàng nhưng loại robot này rất phức tạp trong kết cấu và
cả vấn đề điều khiển để giữ thăng bằng.
Có nhiều cấu tạo humanoid robot nhưng robot di chuyển tương
đối linh hoạt nhất trong số đó là robot HRP-1S của hãng Honda. Vì
vậy, trong tiểu luận này chỉ chú trọng đến cấu tạo của kiểu robot
này.
Chuyển động của Humanoid Robot bao gồm của cả tay và chân.
Tiểu luận này chỉ nghiên cứu phần di chuyển của Robot, có nghóa là
từ phần hông trở xuống dưới.
Hãng Honda bắt đầu nghiên cứu loại robot có hai tay và hai chân
vào năm 1986. Và loại Robot này có tên là P2. Robot P2 có kết cấu
tương đối hoàn chỉnh về cơ khí, nhưng với tiến bộ kó thuật ở thời
điểm này thì vẩn chưa đáp ứng hoàn thiện về mặt điều khiển. Tiếp
theo đó, hãng Honda cũng cho ra đời những kiểu robot khác có cải
tiến về mặt điều khiển như P3, HRP-1S.
2. CẤU TẠO CỦA HUMANOID ROBOT:
2.1 Những chuyển động của con người:
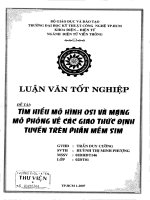
Để hiểu rõ về cấu tạo của Humanoid Robot, chúng ta bắt đầu
nghiên cứu về những cử động của con người. Bởi vì Humanoid Robot
là một cái máy có những chuyển động di chuyển như con người. Ở
hình 2.1 thể hiện kết cấu bộ xương của con người.
Với kết cấu này, ta thấy con người có những cử động ở chân
như sau :
Trang 1
CuuDuongThanCong.com
/>
HUMANOID ROBOT
-
Chuyển động xoay đùi sang bên trái và bên phải.
Chuyển động nâng đùi lên và xuống ở phía trước mặt.
Chuyển động nâng đùi lên và xuống ở phía bên hông.
Chuyển động co và duổi cẳng chân.
Chuyển động xoay bàn chân sang trái và sang phải.
Chuyển động xoay hướng lên trên và hướng xuống dưới của
bàn chân.
Hình 2.1
Trang 2
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 2.2 Chuyển động nâng đùi lên và hạ đùi xuống
Trang 3
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 2.3 Chuyển động xoay đùi sang trái và sang phaûi
Trang 4
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 2.4 Chuyển động co vào và duỗi ra của cẳng chân
Hình 2.5 Chuyển động của bàn chân
Trang 5
CuuDuongThanCong.com
/>
HUMANOID ROBOT
2.2 Cấu tạo của Humanoid robot:
Từ những chuyển động của con người, chúng ta phân tích và
thấy rằng để chuyển động thất linh động thì robot cũng cần có
những chuyển động tương tự như vậy. Cụ thể chúng ta sẽ phân tích
chuyển động của Robot HRP-1S.
Robot HRP-1S có tổng cộng 26 bậc tự do. Hai tay có 12 bậc tự do
trong đó 6 bậc tự do cho mỗi tay. Và hai chân có 12 bậc tự do trong
đó mỗi chân có 6 bậc tự do bao gồm :
o 3 bậc tự do khớp hông (hip)
o 1 bậc tự do khớp đầu gối (knee)
o 2 bậc tự do khớp cổ chân (ankle)
Cuối cùng, Robot có 2 bậc tự do cho khớp cổ.
Hình 2.6 Cấu tạo của robot HRP-1S
Trang 6
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 2.7 Cấu tạo của Humanoid Robot
3. ĐỘNG HỌC:
Ở humanoid robot, ta lấy hệ tọa độ góc ở một chân chạm đất
(nếu có hai chân chạm chất thì có thể lấy bất kì chân nào cũng
được). Từ hệ tọa độ góc này ta có những hệ tọa độ khác tương ứng
với những khớp tiếp theo như hình 3.1 và 3.3.
Trang 7
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 3.1 Các hệ tọa độ của Humanoid robot ở trên
Từ hệ tọa độ quy ước như trên ta có công thức tính động học
như sau:
Thực tế khi di chuyển các khớp không hoàn toàn quay xung
quanh trục 3600 mà chỉ xoay một góc nào đó thôi. Bảng sau cho thấy
góc bị giới hạn :
Trang 8
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 3.2 Mô hình một bên chân của Humanoid robot
Trang 9
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 3.3 Các hệ tọa độ của mô hình Humanoid robot treân
Trang 10
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Với mô hình trên, ta có bảng thông số DH tương ứng :
Stt
1
2
3
4
5
6
7
8
9
Góc Giá trị Tạo bởi
α1
γ1
α2
γ2
α3
γ3
α4
γ4
α5
γ5
α6
γ6
α7
γ7
α8
γ8
α9
γ9
α10
10
γ10
0o
Biến
0o
Biến
+90o
Biến
+90o
Biến
0o
Biến
+90o
Biến
-90o
Biến
0o
Biến
0o
Biến
zo với z1
xo với x1
z1 với z2
x1 với x2
z2 với z3
x2 với x3
z3 với z4
x3 với x4
z4 với z5
x4 với x5
z5 với z6
x5 với x6
z6 với z7
x6 với x7
z7 với z8
x7 với x8
z8 với z9
x8 với x9
z9 với
0o
z10
x9 với
Biến
x10
quay quanh
trục
x1
z0
x2
z1
x3
z2
x4
z3
x5
z4
x6
z5
x7
z6
x8
z7
x9
z8
ai
di
a1
0
a2
0
a3
0
0
0
a5
0
0
0
a7
0
a8
0
a9
0
a10
0
x10
z9
Trang 11
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 3.4 Các hệ tọa độ của khớp cổ chân mô hình Humanoid robot
trên
Hình 3.5 Các hệ tọa độ của khớp gối mô hình Humanoid robot trên
Trang 12
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 3.6 Các hệ tọa độ của khớp hông mô hình Humanoid robot trên
Sau đó, ta thế các thông số của ma trận DH vào ta sẽ có được
ma trận DH chuyển đổi tổng thể theo phương trình sau :
r
TN (q ) = A10(q1). A21(q 2). A32(q3). A43( q 4). A54( q5).
A65(q 6) A76(q 7). A87(q8). A98(q9). A109(q10)
4. NGUYEÂN LÝ GIỮ THĂNG BẰNG:
4.1 Khái niệm:
Bình thường khi đứng bằng hai chân thì khối tâm của robot rơi
vào vùng ở giữa hai chân, vì vậy robot có thể giữ thăng bằng. Vấn
Trang 13
CuuDuongThanCong.com
/>
HUMANOID ROBOT
đề xảy ra là lúc robot di chuyển. Nếu robot rút một chân lên để bước
tới trước thì trọng tâm của robot sẽ bị nằm ngoài đế, do đó robot sẽ
bị ngã.
Để giải quyết vấn đề này thì khi bắt đầu di chuyển ta phải dịch
khối tâm của robot sang chân trụ để thỏa điều kiện cân bằng. Ở hình
4.1 diễn tả sự di chuyển khối tâm ở trạng thái tónh.
Hình 4.1 Sự dịch chuyển khối tâm ở trạng thái tónh
Vấn đề cân bằng xem như được giải quyết nhưng sự di chuyển
là liên tục vì vậy để cho robot di chuyển linh hoạt thì q đạo di
chuyển của khối tâm được thể hiện ở hình 4.2
Hình 4.2 Sự dịch chuyển khối tâm ở trạng thái động
Trang 14
CuuDuongThanCong.com
/>
HUMANOID ROBOT
4.2 Phân loại :
Nhìn chung thì để giữ thăng bằng thì robot phải nghiêng người
qua để dịch chuyển khối tâm. Với kết cấu cơ khí như trên thì để thực
hiện được chuyển động này cần sự phối hợp của khớp ở hán và khớp
ở cổ chân. Và, có hai cách được thể hiện:
- Cách thứ nhất là khép chân vào phía trong như ở hình 4.3
- Cách thứ hai là đưa chân ra ngoài như ở hình 4.4
Hình 4.3 Cách giữ thăng bằng cách khép chân vào trong
Trang 15
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 4.4 Cách giữ thăng bằng bằng cách đưa chân ra ngoài
Hình 4.5 Nhìn bên cạnh
Trang 16
CuuDuongThanCong.com
/>
HUMANOID ROBOT
4.3 Các thông số cần thiết để tính giữ thăng bằng:
Để tính toán giữ thăng bằng cho robot chúng ta cần xác định rõ
kết cấu của robot như :
o Kích thước của từng khâu, khớp.
o Vị trí khối tâm của từng khâu, khớp.
o Moment quán tính của mỗi khâu.
5. NGUYÊN LÝ DI CHUYỂN:
Có hai nguyên lý di chuyển. Nguyên lý di chuyển
Hitachi/Waseda và nguyên lý AIST.
- Nguyên lý di chuyển Hitachi/Waseda : sự di chuyển của toàn
thân robot có thể tính toán những moment tác dụng lên tất cả trục
trước khi robot bắt đầu đi. Điều này có nghóa là phải tạo ra được
một thư viện chương trình để robot có thể di chuyển phức tạp.
Ưu điểm của nguyên lý này là bộ điều khiển đơn giản. Nhưng
robot chỉ di chuyển trên một mặt phẳng tuyệt đối còn với mặt phẳng
lồi lõm thì robot không thể giữ thăng bằng được.
- Nguyên lý của di chuyển AIST : nguyên lý dựa trên phương
pháp động học mới là dạng cân bằng ổn định của con lắc ngược
trong không gian 3 chiều (Three-dimensional Linear Inverted
Pendulum Mode) gọi tắt là 3D-LIPM.
Hầu hết các loại robot điều sử dụng nguyên lý theo dạng ổn
định của con lắc ngược trong không gian 3 chiều. Vì nó có thể di
chuyển trong những mặt phẳng phức tạp. Nhưng nhược điểm của nó
là bộ điều khiển đòi hỏi phải sử dụng những cảm biến phức tạp và
bộ xử lý phải đáp ứng nhanh. Vì vậy, chúng ta chỉ tìm hiểu về nguyên
lý thứ hai.
5.1 Con lắc ngược 3 chieàu:
Trang 17
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.1 Con lắc ngược 3 chiều
Với mô hình con lắc ở trên ta có phương trình mặt phẳng cắt
qua trục z tại điểm C là :
Z = kx.x + ky.y + zc
Nếu mặt phẳng là nằm ngang ( kx = ky = 0 ) thì ta có phương
trình sau :
Trong đó :
- m : khối lượng con lắc
- g : gia tốc trọng trường
- τx, τy : moment trục x, y
Trong trường hợp kx, ky # 0 thì cần thêm ràng buộc sau :
Trang 18
CuuDuongThanCong.com
/>
HUMANOID ROBOT
τx + τy = 0
Với robot di bằng hai chân thì kx = ky = 0, vì vậy:
Phương trình 3D-LIPM là :
5.2 Điểm không :
Ta thấy rằng robot đứng trên mặt đất giống như mô hình con
lắc ngược. Với con lắc ngược thì rỏ rằng để giữ được cân bằng quả
là điều rất khó. Bởi vì trọng tâm của con lắc rất dể bị rơi ra ngoài
chân đế và làm mất thăng bằng.
Chỉ duy nhất có một điểm mà tổng các moment tác dụng lên
con lắc là bằng không. Ta gọi điểm đó là điểm không ( Zero Moment
Point-ZMP).
Từ phương trình trên ta suy ra phương trình điểm không mà tại đó
tổng các moment là bằng không :
Trang 19
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.2 Mô hình tính điểm không
Với trường hợp tổng quát ta có công thức tính điểm không nhu
sau :
Trong đó :
- m : khối lượng của khâu thứ i
- Iix , Iiy : moment quán tính của khâu thứ i
- g : gia tốc trọng trường
-
..
..
Ω ix, Ω iy
: vận tốc gốc quanh trục x, y ở tâm khâu thứ i
- xi, yi, zi : tọa độ khối tâm của khâu thứ i
5.3 Vùng đỡ :
Trên thực tế trong kết cấu cơ khí còn tồn tại lực ma sát ở
những khâu khớp, do đó, có một vùng xung quanh điểm không mà tại
đó nếu trọng tâm của robot rơi vào trong vùng này, khi di chuyển, sẽ
Trang 20
CuuDuongThanCong.com
/>
HUMANOID ROBOT
không bị mất thăng bằng. Vùng này được gọi là vùng đỡ ( supporting
area )
Hình 5.3 Vùng đỡ
5.4 Chu kỳ bước :
Robot di chuyển có 3 trạng thái :
- Trạng thái đứng tại chổ
- Trạng thái q
- Trạng thái di chuyeån.
Trang 21
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.4 Trạng thái của robot
Trong trạng thái di chuyển thì được thực hiện theo 1 chu kỳ
bước. Hình 5.5 biểu diễn chu kỳ bước của con người.
Hình 5.5 Chu kỳ bước của con người
Biểu diễn lại chu kỳ bước của con người theo sơ đồ hình 5.6
như sau :
Trang 22
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.6 Sơ đồ biểu diễn chu kỳ bước
Theo sơ đồ trên thì chu kỳ bước bao gồm 2 pha:
- Pha thứ nhất gọi là pha đôi là pha có hai chân đều tiếp xúc với
mặt đất. ( hình 5.7 )
- Pha thứ hai là pha đơn là pha có một chân tiếp xúc với mặt đất
còn một chân thì di chuyển để bước tới. ( Hình 5.8 )
Hình 5.7 Pha đôi
Trang 23
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.8 Pha đơn
5.5 Các thông số khi di chuyển:
- Chiều dài bước : ảnh hưởng đến tốc độ di chuyển trung bình của
robot. Đối với robot HRP-1S bước di chuyển là 200 (mm)
- Thời gian bước : ảnh hưởng đến tốc độ di chuyển trung bình. Và
đồng thời cũng ảnh hưởng đến phản lực của mặt đất tác dụng lên
robot. Thời gian tối ưu cho di chuyển là 0.8 giây.
- Chiều cao bước : 20 (mm) hay có thể nhỏ hơn 5%.
- Tọa độ của hông (hip).
- Tọa độ của cổ chân (ankle).
- Góc nghiêng của thân.
- Góc nghiêng của bàn chân.
Trang 24
CuuDuongThanCong.com
/>
HUMANOID ROBOT
Hình 5.9 Biểu diễn các thông số
Hình 5.10 Biểu diễn các thông số
5.6 Nguyên lý di chuyển:
Nếu khối tâm của robot không dời về phía trước thì robot
không thể di chuyển. Vì vậy, trong lúc di chuyển không những phải
giữ thăng bằng mà phải di chuyển khối tâm ra khỏi vùng đỡ để có
thể di chuyển được. Sau khi di chuyển khối tâm ra vùng đỡ sẽ phải
Trang 25
CuuDuongThanCong.com
/>