Tài liệu Bài giảng hệ thống điều khiển số P7 ppt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (312.58 KB, 8 trang )
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) ©TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.1
Chương 7: MỘT SỐ PHƯƠNG PHÁP ƯỚC LƯỢNG
TỐC ĐỘ ĐỘNG CƠ ĐCKĐB
I. Các phương pháp ước lượng vận tốc vòng hở
I.1. Phương pháp 1
()
αββα
βα
α
β
β
α
ωωω
srsr
2
r
r
m
2
r
2
r
r
r
r
r
slr
ii
1
T
L
dt
d
dt
d
Ψ−Ψ
Ψ
−
Ψ+Ψ
Ψ
Ψ−
Ψ
Ψ
=−=
Trong đó:
()
[]
αααα
σ
sssss
m
r
r
iLdtiRu
L
L
−−=Ψ
∫
()
[]
ββββ
σ
sssss
m
r
r
iLdtiRu
L
L
−−=Ψ
∫
()
2
r
2
rr
βα
Ψ+Ψ=Ψ
Chứng minh (cách 1):
Chứng minh:
2
r
2
r
r
r
r
r
r
dt
d
dt
d
βα
α
β
β
α
ω
Ψ+Ψ
Ψ
Ψ−
Ψ
Ψ
=
2
r
r
2
r
r
r
r
r
r
r
srr
1
1
dt
d
dt
d
arctg
dt
d
dt
d
dt
d
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Ψ
Ψ
+
Ψ
Ψ
Ψ−
Ψ
Ψ
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Ψ
Ψ
===
α
β
α
β
α
α
β
α
β
θφω
⇒
2
r
2
r
r
r
r
r
r
dt
d
dt
d
βα
α
β
β
α
ω
Ψ+Ψ
Ψ
Ψ−
Ψ
Ψ
=
Chứng minh:
()
αββα
ω
srsr
2
r
r
m
sl
ii
1
T
L
Ψ−Ψ
Ψ
=
Có
slrrsqm
TiL
ω
Ψ=
và
sqrd
r
m
e
i
L
L
p
2
3
T Ψ=
⇒
2
r
e
r
r
sl
T
p3
2
T
L
Ψ
=
ω
mà
rrsmr
iLiL
+=
ψ
⇒
r
r
s
r
m
r
L
1
i
L
L
i
ψ
+−=
nên
()
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−Ψ−=Ψ−=
r
r
s
r
m
rrre
L
1
i
L
L
xp
2
3
xip
2
3
T
ψ
()
sr
r
m
s
r
m
re
xi
L
L
p
2
3
i
L
L
xp
2
3
T Ψ=
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−Ψ−=
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) ©TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.2
⇒
( )
()
αββα
ω
srsr
2
r
r
m
2
r
sr
r
m
2
r
e
r
r
sl
ii
1
T
L
xi
T
L
T
p3
2
T
L
Ψ−Ψ
Ψ
=
Ψ
Ψ
=
Ψ
=
Chứng minh (cách 2):
Có:
βαα
α
ωψ−ψ−=
ψ
rr
r
s
r
m
r
T
1
i
T
L
dt
d
αββ
β
ωψ+ψ−=
ψ
rr
r
s
r
m
r
T
1
i
T
L
dt
d
⇒
2
rrr
r
rs
r
m
r
r
T
1
i
T
L
dt
d
ββαβα
α
β
ωψψψψ
ψ
ψ
−−=
2
rrr
r
rs
r
m
r
r
T
1
i
T
L
dt
d
ααβαβ
β
α
ωψψψψ
ψ
ψ
+−=
⇒
()
()
2
r
2
rrsrs
r
m
r
r
r
r
ii
T
L
dt
d
dt
d
βαβααβ
α
β
β
α
ψψωψψ
ψ
ψ
ψ
ψ
++−=−
⇒
()
βααβ
α
β
β
α
ψψ
ψ
ψ
ψ
ψωψ
rsrs
r
m
r
r
r
r
2
r
ii
T
L
dt
d
dt
d
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
⇒
()
2
r
rsrs
r
m
2
r
r
r
r
r
ii
T
L
dt
d
dt
d
ψ
ψψ
ψ
ψ
ψ
ψ
ψ
ω
βααβ
α
β
β
α
−
−
−
=
Chứng minh:
dt
d
iRu
s
s
s
ss
s
s
ψ
+=
⇒
s
ss
s
s
s
s
iRu
dt
d
−=
ψ
Và
rmsss
iLiL
r
r
r
+=ψ
rrsmr
iLiL
r
r
r
+=ψ
( )
s
ss
s
s
m
s
r
iL
L
1
i
r
r
r
−=
ψ
()
s
s
m
rs
rs
2
m
s
s
m
r
s
ss
s
s
m
r
s
smr
i
L
LL
LL
L
1
L
L
iL
L
L
iL
r
r
r
r
r
r
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=−+=Ψ
ψψ
⇒
s
s
m
rs
s
s
m
r
s
r
i
L
LL
L
L
σψ
−=Ψ
⇒
dt
di
L
LL
dt
d
L
L
dt
d
s
s
m
rs
s
s
m
r
s
r
σ
ψ
−=
Ψ
⇒
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
Ψ
dt
di
LiRu
L
L
dt
d
s
s
s
s
ss
s
s
m
r
s
r
σ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
Ψ
dt
di
LiRu
L
L
dt
d
s
ssss
m
r
r
α
αα
α
σ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
Ψ
dt
di
LiRu
L
L
dt
d
s
ssss
m
r
r
β
ββ
β
σ
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) ©TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.3
Hay
()
[ ]
s
ss
s
ss
s
s
m
r
s
r
iLdtiRu
L
L
σ
−−=Ψ
∫
I.2. Phương pháp 2
ββαα
α
β
β
α
ψψ
ψ
ψ
ω
rrrr
r
r
r
r
ii
dt
d
i
dt
d
i
+
−
=
Trong đó,
()
s
ss
s
s
m
s
r
iL
L
1
i −=
ψ
⇒
()()
()()
βββααα
α
ββ
β
αα
ψψψψ
ψ
ψ
ψ
ψ
ω
rsssrsss
r
sss
r
sss
iLiL
dt
d
iL
dt
d
iL
−+−
−−−
=
Với
s
s
m
rs
s
s
m
r
s
r
i
L
LL
L
L
σψ
−=Ψ
⇒
ααα
σψψ
s
m
rs
s
m
r
r
i
L
LL
L
L
−=
βββ
σψψ
s
m
rs
s
m
r
r
i
L
LL
L
L
−=
với
s
ss
s
s
s
s
iRu
dt
d
−=
ψ
⇒
()
dtiRu
ssss
∫
−=
ααα
ψ
()
dtiRu
ssss
∫
−=
βββ
ψ
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) ©TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.4
Chứng minh:
s
r
s
r
s
rr
j
d
t
d
iR0
ψω
ψ
r
r
r
−+=
⇒
β
α
α
ωψ
ψ
r
r
rr
dt
d
iR0 ++=
α
β
β
ωψ
ψ
r
r
rr
dt
d
iR0 −+=
⇒
ββ
α
ββαβ
ψω
ψ
rr
r
rrrrr
i
d
t
d
iiiRi.0 ++=
αα
β
ααβα
ψω
ψ
rr
r
rrrrr
i
d
t
d
iiiRi.0 −+=
⇒
()
αββα
α
β
β
α
ψψω
ψ
ψ
rrrr
r
r
r
r
ii
dt
d
i
dt
d
i0 +−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
⇒
ββαα
α
β
β
α
ψψ
ψ
ψ
ω
rrrr
r
r
r
r
ii
dt
d
i
dt
d
i
+
−
=
II. Ước lượng vận tốc vòng kín
Dùng điều khiển thích nghi mô hình (Model Reference Adaptive Control – MRAC)
Mô hình thích nghi:
ω
β
ω
αα
ω
α
ω
rr
r
s
r
m
r
T
1
i
T
L
dt
d
Ψ−Ψ−=
Ψ
(7.1a)
ω
α
ω
ββ
ω
β
ω
rr
r
s
r
m
r
T
1
i
T
L
dt
d
Ψ+Ψ−=
Ψ
(7.1b)
Mô hình tham khảo:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
Ψ
dt
di
LiRu
L
L
dt
d
s
s
s
s
ss
s
s
m
r
s
r
σ
[][ ]
()
babar
i,i,u,u=Ψ
Sai số mô hình:
ε =
( ) ( )
s
r
s
r
Ψ×Ψ
ω
rr
=
ω
α
Ψ
r
β
Ψ
r
–
α
Ψ
r
ω
β
Ψ
r
(7.2)
Hiệu chỉnh sai số:
ε
⎟
⎠
⎞
⎜
⎝
⎛
+=ω
s
K
K
i
p
(7.3)
Ít phụ thuộc vào thông số mô hình và các đại lượng hồi tiếp.
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) ©TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.5
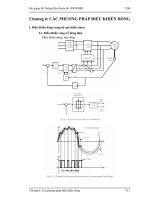
Khi đó, tốc độ ω được ước lượng theo sơ đồ sau:
Hình 7.1: Sơ đồ nguyên lý bộ ước lượng tốc độ ĐCKĐB ba pha.
Từ chương 3, có:
s
r
r
s
s
r
m
s
r
j
T
1
i
T
L
dt
d
ψω
ψ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
⇒
ω
β
ω
αα
ω
α
ω
rr
r
s
r
m
r
T
1
i
T
L
dt
d
Ψ−Ψ−=
Ψ
ω
α
ω
ββ
ω
β
ω
rr
r
s
r
m
r
T
1
i
T
L
dt
d
Ψ+Ψ−=
Ψ
chỉ số “ω” góc trên phải chỉ từ thông được tính trực tiếp từ tốc độ ước lượng ω.
Nhận xét:
Theo hệ phương trình (7.1) thì từ thông rotor (xét trong hệ tọa độ stator)
phụ thuộc vào tốc độ ω.
Mặc khác, bộ ước lượng từ thông đã cho kết quả tương đối chính xác về
giá trị của vector từ thông rotor.
Như vậy, nếu tốc độ ước lượng ω trong phương trình (7.1) khác với tốc độ
thực của động cơ thì vector từ thông (
ω
α
Ψ
r
,
ω
β
Ψ
r
) tính được ở phương trình
(7.1) sẽ sai lệch với vector từ thông (
α
Ψ
r
,
β
Ψ
r
) ước lượng. Sai lệch này
được định nghĩa bằng:
ε =
( ) ( )
s
r
s
r
Ψ×Ψ
ω
rr
=
ω
α
Ψ
r
β
Ψ
r
–
α
Ψ
r
ω
β
Ψ
r
(7.2)
nếu sai lệch ε càng nhỏ thì tốc độ ước lượng của động cơ sẽ càng gần bằng
với tốc độ thực của động cơ.
Bộ ước lượng tốc độ cho động cơ KĐB ba pha sử dụng khâu hiệu chỉnh tích
phân tỉ lệ PI để giảm thiểu sai lệch giữa hai vector từ thông trên:
ε
⎟
⎠
⎞
⎜
⎝
⎛
+=ω
s
K
K
i
p
(7.3)
Mô hình
thích nghi
hệ pt (7.1)
ω
ψ
s
r
ˆ
r
ω
s
K
K
i
p
+
ω
( ) ( )
s
r
s
r
Ψ×Ψ
rr
ω
pt (7.2)
ε
từ thông ước lượng
Mô hình
tham khảo
s
r
ψ
r
s
s
u
r
s
s
i
r
s
s
i
r