Giáo trình Lập trình PLC (Nghề: Điện tử công nghiệp) - Trường CĐ Nghề Kỹ thuật Công nghệ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.32 MB, 89 trang )
-1TUYÊN BỐ BẢN QUYỀN
Tài liệu này thuộc loại sách giáo trình nên các nguồn thơng tin có thể được phép
dùng nguyên bản hoặc trích dùng cho các mục đích về đào tạo và tham khảo.
Mọi mục đích khác mang tính lệch lạc hoặc sử dụng với mục đích kinh doanh
thiếu lành mạnh sẽ bị nghiêm cấm.
-2LỜI GIỚI THIỆU
Để thực hiện biên soạn giáo trình đào tạo nghề Cơ điện tử ở trình độ Cao đẳng và
Trung cấp, giáo trình Lập trình PLC là một trong những giáo trình mơ đun đào tạo
chun ngành được biên soạn theo nội dung chương trình chi tiết mơ đun Lập trình
ứng dụng PLC. Nội dung biên soạn ngắn gọn, dễ hiểu, tích hợp kiến thức và kỹ năng
chặt chẽ với nhau, logic.
Nội dung của giáo trình “ Lập trình PLC” đã được xây dựng trên cơ sở kế thừa những
nội dung giảng dạy các trường, kết hợp với những nội dung mới nhằm đáp ứng yêu cầu
nâng cao chất lượng đào tạo, phục vụ sự nghiệp cơng nghiệp hóa, hiện đại hóa đất
nước.
Giáo trình nội bộ này do các nhà giáo có nhiều kinh nghiệm nhiều năm làm cơng tác
trong ngành đào tạo chuyên nghiệp. Giáo trình được biên soạn ngắn gọn, dễ hiểu, bổ
sung nhiều kiến thức mới và biên soạn theo quan điểm mở, nghĩa là đề cập những nội
dung cơ bản, cốt yếu để tùy theo tính chất của các ngành nghề đào tạo mà nhà trường
tự điều chỉnh cho thích hợp và khơng trái với quy định của chương trình khung đào tạo
cao đẳng nghề. Tuy tác giả đã có nhiều cố gắng khi biên soạn, nhưng giáo trình chắc
chắn khơng tránh khỏi những thiếu sót, rất mong nhận được sự tham gia đóng góp ý
kiến của các đồng nghiệp và các chuyên gia kỹ thuật đầu ngành.
Xin trân trọng cảm ơn !!!
Hà Nội, ngày
tháng
năm 2019
BAN CHỦ NHIỆM BIÊN SOẠN GIÁO TRÌNH
NGHỀ: ĐIỆN TỬ CƠNG NGHIỆP
TRƯỜNG CAO ĐẲNG NGHỀ KỸ THUẬT CÔNG NGHỆ
-3MỤC LỤC
TRANG
LỜI GIỚI THIỆU .................................................................................................... - 2 BÀI 1: LẬP TRÌNH CÁC TẬP LỆNH CỦA DỮ LIỆU ............................................- 7 1. Lập trình các lệnh liên kết logic .......................................................................... - 7 1.1. Các lệnh vào/ra và các lệnh tiếp điểm đặc biệt. ............................................... - 7 1.2. Trình tự thực hiện ........................................................................................... - 12 1.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 18 1.4. Bài tập ứng dụng liên quan ............................................................................. - 18 2. Lập trình các lệnh ghi/xóa giá trị cho tiếp điểm. ............................................... - 21 2.1. Các lệnh các lệnh ghi/xóa giá trị cho tiếp điểm. ............................................ - 21 2.2. Trình tự thực hiện ........................................................................................... - 34 2.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 35 BÀI 2: LẬP TRÌNH CÁC PHÉP TỐN SỐ CỦA PLC..........................................- 37 1. Lập trình các lệnh chức năng truyền dẫn ........................................................ - 37 1.1. Các lệnh chức năng truyền dẫn ....................................................................... - 37 1.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 44 1.4. Bài tập ứng dụng liên quan ............................................................................. - 45 2. Lập trình các lệnh chức năng so sánh ................................................................ - 48 2.1. Các lệnh chức năng so sánh ............................................................................ - 48 2.2. Trình tự thực hiện: .......................................................................................... - 51 2.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 52 2.4. Bài tập ứng dụng liên quan ............................................................................. - 52 BÀI 3: LẬP TRÌNH VÀ VẬN HÀNH MƠ HÌNH ĐIỀU KHIỂN BẰNG PLC .....- 55 1. Lập trình và vận hành điều khiển mơ hình van điện từ hai cuộn dây. .............. - 55 1.1. Mơ hình van điện từ hai cuộn dây .................................................................. - 55 1.2. Trình tự thực hiện ........................................................................................... - 57 1.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 57 1.4. Bài tập ứng dụng liên quan ............................................................................. - 58 2. Lập trình và vận hành điều khiển hệ thống cung cấp khí nén. ......................... - 59 2.1. Mơ hình hệ thống cung cấp khí nén ............................................................... - 59 2.2. Trình tự thực hiện ........................................................................................... - 63 -
-42.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 63 2.4. Bài tập ứng dụng liên quan ............................................................................. - 64 3. Lập trình và vận hành mơ hình điều khiển đảo chiều trực tiếp động cơ 3 pha roto
lồng sóc .................................................................................................................. - 66 3.1. Mơ hình điều khiển đảo chiều trực tiếp động cơ 3 pha roto lồng sóc ............ - 66 3.2. Trình tự thực hiện ........................................................................................... - 68 3.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 69 3.4. Bài tập ứng dụng liên quan ............................................................................. - 69 4. Lập trình và vận hành mơ hình điều khiển đảo chiều gián tiếp động cơ 3 pha rơ to
lồng sóc .................................................................................................................. - 69 4.1. Mơ hình điều khiển đảo chiều trực tiếp động cơ 3 pha roto lồng sóc ............ - 69 4.2. Trình tự thực hiện ........................................................................................... - 71 4.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 72 4.4. Bài tập ứng dụng liên quan ............................................................................. - 72 5. Lập trình và vận hành mơ hình điều khiển mở máy sao/tam giác động cơ khơng
đồng bộ ba pha....................................................................................................... - 75 5.1. Mơ hình điều khiển mở máy sao/tam giác động cơ không đồng bộ ba pha
5.2. Trình tự thực hiện ........................................................................................... - 77 5.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 78 5.4. Bài tập ứng dụng liên quan ............................................................................. - 78 6.1. Mơ hình điều khiển băng tải ........................................................................... - 81 6.2. Trình tự thực hiện ........................................................................................... - 84 6.3. Những lỗi thường gặp, cách khắc phục .......................................................... - 85 6.4. Bài tập ứng dụng liên quan ............................................................................. - 85 TÀI LIỆU THAM KHẢO ......................................................................................- 89 -
-5-
GIÁO TRÌNH MƠ ĐUN
Tên mơ đun: Lập trình PLC
Mã mơ đun: MĐ ĐTCN 23
Thời gian thực hiện mô đun: 90 giờ; (Lý thuyết: 25 giờ; Thực hành: 59 giờ; Thi, kiểm tra 6)
I. Vị trí, tính chất của mơ đun:
- Vị trí: Là mơn học chun mơn nghề trong chương trình đạo tạo trình độ cao
đẳng cơ điện tử.
- Tính chất: Là mô đun chuyên môn nghề
II. Mục tiêu mô đun:
* Về kiến thức:
- Phân tích được nguyên lý làm việc của hệ điều khiển lập trình PLC và so sánh
được các ưu nhược điểm với các hệ thống điều khiển khác.
- Lập được các bước lập trình, kết nối và điều khiển các mơ đun và mơ hình PLC
ứng dụng
- Biết phòng tránh các lỗi thường gặp khi lập trình, kết nối và điều khiển
chương trình PLC
* Về kỹ năng:
- Viết được chương trình trên phần mềm PLC để điều khiển các mơ hình PLC ứng
dụng
- Kết nối và nạp được chương trình từ máy tính đến các mơ hình ứng dụng PLC
- Vận hành được mơ hình ứng dụng PLC sau khi đã nạp chương trình vào PLC
- Phòng tránh và sửa chữa được các lỗi thường gặp khi viết chương trình, nạp
chương trình và vận hành mơ hình ứng dụng PLC
* Về năng lực tự chủ và trách nhiệm:
-
Rèn luyện tính tỷ mỉ, chính xác và an tồn vệ sinh cơng nghiệp.
-
Tự chịu trách nhiệm khi thực hiện các việc được giao.
Nội dung của môn học/mô đun:
Thời gian (giờ)
Số
TT
Tên các bài trong mơ đun
Tổng
số
Lý
thuyết
Thực hành,
thí nghiệm,
thảo luận,
bài tập
1
Bài 1: Lập trình các tập lệnh của dữ
liệu.
25
8
17
Kiểm
tra
-6-
2
Bài 2: Lập trình các phép tốn số của
23
6
15
2
11
27
2
PLC
3
Bài 3: Lập trình và vận hành mơ hình
điều khiển bằng PLC.
40
4
Thi kết thúc mô đun
2
Cộng
90
2
25
59
6
-7-
BÀI 1: LẬP TRÌNH CÁC TẬP LỆNH CỦA DỮ LIỆU
Mã mô đun: MĐ ĐTCN23 - 1
Giới thiệu:
Như đã biết, nước ta hiện nay đang trong q trình cơng nghiệp hóa, hiện đại
hóa. Vì thế, tự động hóa sản xuất đóng vai trị quan trọng, tự động hóa giúp tăng năng
suất, tăng độ chính xác và do đó tăng hiệu quả q trình sản xuất. Để có thể thực hiện
tự động hóa sản xuất, bên cạnh các máy móc cơ khí hay điện, các dây chuyền sản
xuất…v.v, cũng cần thiết phải có các bộ điều khiển để điều khiển chúng.Trong đó,
được u cầu đó.điều khiển lập trình là một trong các bộ điều khiển đáp ứng
Mục tiêu:
Sau khi học xong bài học này người học có khả năng:
+ Kiến thức:
- Phân tích được cấu trúc của các lệnh liên kết logic và các lệnh ghi/ xóa giá
trị cho tiếp điểm
+ Kỹ năng:
- Lâp trình được các lệnh liên kết logic và các lệnh ghi/ xóa giá trị cho tiếp
điểm theo yêu cầu kỹ thuật.
- Sửa được các lỗi thường gặp khi lập trình điều khiển.
- Kiểm tra chính xác điều kiện hoạt động của thiết bị.
+ Năng lực tự chủ và trách nhiệm:
- Rèn luyện tính tỷ mỉ, chính xác và an tồn vệ sinh cơng nghiệp.
- Tự chịu trách nhiệm khi thực hiện các việc được giao
Nội dung:
1. Lập trình các lệnh liên kết logic
1.1. Các lệnh vào/ra và các lệnh tiếp điểm đặc biệt.
1.1.1. Tiếp điểm thường mở(NO_Normally open contact)
Ký hiệu:
-8n: Biểu diễn các toán hạng địa chỉ ngõ vào như sau: I, Q, M, L, T, C, D.
Lệnh này dung để đặt một công tắc logic thường mở vào chương trình, nó để kiểm tra
trạng thái tín hiệu mức logic 1. Khi đó kết quả của phép tốn logic RLO=1 (Result Of
Logic Operation). Tiếp điểm này sẽ đóng tức là lên 1
khi n x.y=1. nếu n x.y=0 thì tiếp điểm sẽ về mức Logic 0 (RLO=0).
Khi sử dụng tiếp điểm NO mắc nối tiếp thì kết quả giống như cổng Logic
AND. Khi sử dụng tiếp điểm NO mắc song song thì kết quả giống như cổng
Logic OR
Lệnh này tác động lên thanh ghi trạng thái như sau (ký hiệu”-“ chỉ nội dung
bit không bị thay đổi, “x” chỉ nội dung bit bị thay đổi theo trạng thái:
1.1.2. Tiếp điểm thường đóng (NC_ Normally close contact)
Ký hiệu:
LAD FBD STL AN n x.y
n: Biểu diễn các toán hạng địa chỉ ngõ vào như sau: I, Q, M, L, T, C, D.
Lệnh này dùng để đặt một cơng tắc logic thường đóng vào chương trình, nó để kiểm
tra trạng thái tín hiệu mức logic 0. Khi đó kết quả của phép tốn logic
RLO=0(Result Of Logic Operation). Tiếp điểm này sẽ mở tức là xuống 0 khi n x.y=1.
Nếu n x.y=0 thì tiếp điểm sẽ lên mức Logic 1 (RLO=1).
Khi sử dụng tiếp điểm NO mắc nối tiếp thì kết quả giống như cổng Logic
AND. Khi sử dụng tiếp điểm NO mắc song song thì kết quả giống như cổng
Logic OR
Lệnh này tác động lên thanh ghi trạng thái như sau (ký hiệu”-“ chỉ nội dung bit
không bị thay đổi, “x” chỉ nội dung bit bị thay đổi theo trạng thái:
-91.1.3. Cuộn dây ngõ ra (output coil)
Ký hiệu:
n: Biểu diễn các toán hạng địa chỉ ngõ vào như sau: I, Q, M, L, D.
Chức năng của lệnh này giống như cuộn dây ở mạch Rơle. Lệnh này khơng duy trì
trạng thái mà có trạng thái giống như ở ngõ vào của lệnh.
Nghĩa là:
- Nếu có tín hiệu chạy qua cuộn dây thì n x.y=1.
- Nếu khơng có tín hiệu chạy qua cuộn dây thì n x.y=0.
Lệnh này tác động lên thanh ghi trạng thái như sau:
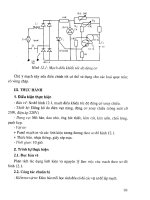
Ví dụ: Mạch điều khiển động cơ hoạt động theo chu trình đóng ngắt. Khi nhấn một
nút thì động cơ chạy. Nhấn nút khác thì động cơ ngừng.
Sơ đồ mạch:
Hoạt động của mạch: Khi nhấn I0.0 thì ngõ ra Q4.0 có điện điều khiển động cơ hoạt
động, đồng thời tiếp điểm thường hở Q4.0 mắt song song với I0.0 giúp cho mạch
duy trì hoạt động. Khi nhấn nút nhấn I0.1 thì làm ngắt mạch ngõ ra, động cơ ngừng
hoạt động
1.1.4. Lệnh Not (Lệnh đảo tín hiệu _ invert power flow)
Ký hiệu:
- 10 Lệnh NOT khơng có tốn hạng là địa chỉ. Nó có chức năng làm đảo trạng thái của
kết quả phép toán Logic (RLO).
Lệnh này tác động lên thanh ghi trạng thái như sau:
Ví dụ: Mạch đảo tín hiệu có sơ đồ như sau:
Hoạt động: Tín hiệu ngõ ra Q4.0=0 khi I0.0=1. Tín hiệu ngõ ra Q4.0=1 khi I0.0=0.
1.1.5. Lệnh kết nối (connector)
Ký hiệu:
LAD FBD STL
n: Biểu diễn các toán hạng địa chỉ ngõ vào như sau: I, Q, M, L, D. Địa chỉ L chỉ
được sử dụng chỉ khi nó được khai báo trong bảng khai báo của các khối Logic
(OB,FC, FB).
Kết nối là phần tử trung gian dùng để lưu trữ RLO hiện hành tại một địa chỉ cụ thể,
khi kết nối nối với các phần tử khác lệnh kết nối được chèn giống như chèn một tiếp
điểm.
- Một kết nối không bao giờ được
- Nối vào một ray dẫn điện.
- Trực tiếp sau một sự phân nhánh.
- Sử dụng tại một điểm kết thúc một nhánh.
- Có thể tạo một kết nốiphủ định bằng phần tử NOT.
Lệnh này tác động lên thanh ghi trạng thái như sau:
Ví dụ:
- 11 -
Khi mức Logic ở tiếp điểm I0.0 và I0.1 lên 1 thì M0.0 lên 1, ngõ ra Q4.0=0 (Bình
thường Q4.0=1) và I0.3 là tiếp điểm thường đóng nên ngõ ra Q4.1 lên 1
1.1.6. Hàm AND
Toán hạng là kiểu dữ liệu BOOL hay địa chỉ bit I,Q, M, T,C, D, L
Tín hiệu ra Q4.0 sẽ bằng 1 khi đồng thời tín hiệu I0.0=1 và I0.1=1.
Dữ liệu vào và ra :
Vào: I0.0, I0.1:
BOOL
Ra : Q4.0
: BOOL
1.1.7.Hàm OR :
Toán hạng là kiểu dữ liệu BOOL hay địa chỉ bit I,Q, M, T,C, D, L.
Tín hiệu ra sẽ bằng 1 khi ít nhất có một tín hiệu vào bằng 1.
Dữ liệu vào và ra:
Vào : I0.0, I0.1: BOOL
Ra : Q4.0: BOOL
1.1.8.Hàm XOR
Toán hạng là kiểu dữ liệu BOOL hay địa chỉ bit I, Q, M, T,C, D, L.
- 12 -
Tín hiệu ra Q4.0= 1 khi I0.0 khác I0.2
Dữ liệu vào và ra:
Vào: I0.0, I0.1
:
BOOL
Ra : Q4.0
:
BOOL
1.2. Trình tự thực hiện
1.2.1 Điều kiện thực hiện
- Máy vi tính
- Module PLC S7 300.
- Giắc cắm, Cáp MPI kết nối máy tính và mơ đun PLC S7 – 300.
- Phần mềm lập trình Step7-300
- Nguồn 220V cung cấp cho module PLC S7 – 300
1.2.2 Các bước thực hiện:
Bước 1: Tạo Project và khai báo phần cứng:
-
Khởi động phần mềm:
-
Tạo project mới
- 13 -
-
Khai báo phần cứng:
Giả sử ta đặt chương trình là ‘c’.
Click chuột phải vào ký hiệu như trên, chọn :
Tiếp theo, trong phần trạm SIMATIC 300 vừa chọn, ta Double Click vào
phần Hardware để cấu hình phần cứng cho hệ thống S7 300 của ta.
- 14 Ta chọn các thiết bị phần cứng từ thư viện linh kiện bên cột phải.
Ta phải chọn cho đúng với mã số ghi trên thiết bị. Bằng các thao tác rê
kéo thả vào cửa sổ bên phải.
Ví dụ như ta chọn một thanh Rail trước tiên, sau đó ta bỏ các thiết bị như CPU
312C, hai Module DI, hai Module DO lên thanh Rail
* Thay đổi địa chỉ In / Out treân CPU S7-300 :
- 15 Giả sử ta có một cấu hình phần cứng như sau, ta sẽ có vùng địa chỉ quản lý
Ta Double Click vào ngay trên Module muốn đổi địa chỉ
Xuất hiện :
Nếu ta để dấu kiểm tại System selection thì vùng địa chỉ này sẽ được
chọn theo mặc định, vùng Start sẽ bị mờ đi làm ta không thay đổi được. Nếu
muốn thay đổi vùng địa chỉ, ta bỏ dấu kiểm đi, đánh số địa chỉ vào vùng Start
Xong nhấn OK.
Tương tư như thế, ta có thể thay đổi bất kỳ vùng địa chỉ nào nếu muốn,
nhưng lưu ý là vùng địa chỉ thay đổi không được trùng với vùng địa chỉ đã sử
- 16 dụng trên Module khác và ta nên sử dụng vùng địa chỉ sao cho việc quản lý để
viết chương trình được dễ dàng.
Sau đó ta lưu lại chương trình. Quay về cửa sổ chương trình của SIMATIC
Manager, ta sẽ thấy :
Vào phần Blocks \ OB1. Double click vào OB1 để soạn thảo chương
trình.
* Khai báo kết nối PLC và Máy tính :
Ta vào Option \ Set PG/PC Interface hay vào Control Panel \ Set
PG/PC Interface :
- 17 -
Chọn mục PC Adapter(MPI). Vào Properties, chọn cổng COM kết nối, tốc độ
truyền 187,5kbps.
Sau khi khai báo xong, ta kết nối PLC với máy tính và nhấn nhút Download trên
cửa sổchính SIMATIC Manager để Down load tồn bộ phần cứng và chương trình
vừa viết vào PLC.
Ta cũng có thể Download phần cứng riêng trong cửa sổ HW, hay chỉ Download
chương trình trong cửa sổ OB1.
Bước 2: Lấy các lệnh liên kết logic
-
Tiếp điểm thường đóng
- 18 1.3. Những lỗi thường gặp, cách khắc phục
Sai hỏng
- Khai báo sai cấu hình phần cứng
của PLC S7 – 300 trên phần mềm.
- Khai báo sai các đầu vào/ra dữ
liệu.
- Kết nối sai các đầu vào/ ra dữ liệu.
- Lập trình khơng đúng với u cầu
cơng nghệ đưa ra.
- Khơng kết nối máy tính được với
PLC
Ngun nhân
Cách khắc phục
- Chọn sai loại CPU
- Chọn đúng loại
- Chọn sai đầu vào, đầu CPU
ra
- Chọn đúng các đầu
vào, đầu ra.
- Ghi sai đầu vào, đầu
- Ghi đúng đầu vào,
ra dữ liệu trên phần
đầu ra dữ liệu trên
mềm
phần mềm
- Kết nối sai dây giữa
- Kết nối đúng dây
PLC với thiết bị
giữa PLC với thiết
bị
- Chưa xác định đúng
Xác định đúng yêu
yêu cầu công nghệ
cầu công nghệ đưa
ra
- Chọn sai loại cáp kết - Chọn đúng loại
nối
cáp kết nối
1.4. Bài tập ứng dụng liên quan
Bài tập 1: Cho sơ đồ mạch như hình vẽ dưới. Em hãy sử dụng các lệnh đã học và viết
chương trình cho bài tốn.
Hướng dẫn:
1. Xác lập bảng địa chỉ vào/ra:
Ký hiệu
S1
S2
S3
S4
H6
2. Viết chương trình:
Xác lập vào / ra
Địa chỉ
Chú thích
I0.1
Cơng tắc thường mở
I0.2
Cơng tắc thường mở
I0.3
Cơng tắc thường mở
I0.4
Công tắc thường mở
Q0.0
Đèn báo
- 19 -
3. Mơ tả:
Ngõ ra Q0.1 chỉ có tín hiệu bằng 1, nếu các ngõ vào I0.1 và I0.2 cuả cổng AND có
tín hiệu bằng 1 hoặc các ngõ vào I0.3 hoặc I0.4 có tín hiệu bằng 1.
Em hãy viết chương trình bằng thiết bị lập trình và chuyển vào PLC.
Thử chương trình
Bài tập 2: Cho sơ đồ mạch như hình vẽ dưới. Em hãy sử dụng các lệnh đã học và viết
chương trình cho bài tốn.
Hướng dẫn:
1.
Xác lập bảng địa chỉ vào/ra:
Kí hiệu
S1
S2
S3
S4
S5
H2
2.
Viết chương trình:
Xác lập vào/ra
Điạ chỉ
Chú thích
I0.1
Cơng tắc thường mở
I0.2
Cơng tắc thường mở
I0.3
Cơng tắc thường mở
I0.4
Cơng tắc thường mở
I0.5
Công tắc thường mở
Q0.1
Đèn báo
- 20 3. Mơ tả:
Ngõ ra Q0.1 ở hình 4.14 chỉ có tín hiệu bằng 1, nếu có ít nhất một ngõ vào cuả các
cổng AND hoặc ngõ vào I0.5 có tín hiệu 1.
Em hãy viết chương trình bằng thiết bị lập trình và chuyển vào PLC.
Thử chương trình
Bài tập 3: Cho sơ đồ mạch như hình vẽ dưới. Em hãy sử dụng các lệnh đã học và viết
chương trình cho bài toán.
Hướng dẫn:
Xác lập bảng địa chỉ vào/ra:
Xác lập vào/ra
Kí hiệu
Điạ chỉ
Chú thích
S1
I0.1
Nút nhấn thường mở
S2
I0.2
Nút nhấn thường đóng
S3
I0.3
Nút nhấn thường mở
S4
I0.4
Nút nhấn thường đóng
K1
Q0.1
Khởi động từ
K2
Q0.2
Khởi động từ
2.
Viết chương trình: (HS tự viết)
3.
Mơ tả:
Khi nhấn S1, ngõ vào I0.1 có tín hiệu 1, làm cho ngõ ra Q0.1 (K1) có tín hiệu 1. Cuộn
dây K1 có điện. Khi nhấn S2 (ngõ vào I0.2) ngõ ra Q0.1 sẽ có tín hiệu 0, cuộn dây K1
mất điện.
- 21 2. Lập trình các lệnh ghi/xóa giá trị cho tiếp điểm.
2.1. Các lệnh các lệnh ghi/xóa giá trị cho tiếp điểm.
2.1.1. Lệnh SET (S) và RESET (R).
a. Lệnh SET
Toán hạng là địa chỉ bit I, Q, M, T, C, D, L.
Tín hiệu ra Q4.0 = 1 (Q4.0 sẽ đ-ợc thiết lập ) khi I0.0 =1.
Dữ liệu vào và ra:
Vào I0.0 :
BOOL
Ra Q4.0 :
BOOL
b. Lệnh xoá RESET
Toán hạng là địa chỉ bit I, Q, M, T, C, D, L.
Tín hiệu ra Q4.0 = 0 (Q4.0 sẽ được xoá ) khi I0.0 =1 .
Dữ liệu vào và ra:
Vào: I0.0
: BOOL
Ra : Q4.0 :
BOOL
2.1.2. Các bộ nhớ
a.Bộ nhớ RS
Toán hạng là địa chỉ bit I, Q, M, D, L
- 22 -
Khi I0.0 = 1 và I0.1 =0 Merker M0.0 bị Reset và đầu ra Q4.0 là "0". Nếu
I0.0 = 0 và I0.1 = 1 thì Set cho M0.0 và đầu ra Q4.0 là "1".
Khi cả hai đầu vào Set va Reset cùng đồng thời =1 thì M0.0 và Q4.0 có giá
trị là "1".
Dữ liệu vào và ra:
Vào I0.0, I0.1
Ra Q4.0
BOOL
BOOL
b.Bộ nhớ SR
Toán hạng là địa chỉ bit I, Q, M, D, L
Khi I0.0 = 1 và I0.1 =0 thì Set cho Merker M0.0 và đầu ra Q4.0 là "1". Nếu
I0.0 = 0 và I0.0 = 1 thì M0.0 bị Reset và đầu ra Q4.0 là "0".
Khi cả hai đầu vào Set va Reset cùng đồng thời =1 thì M0.0 và Q4.0 có giá
trị là "0".
Dữ liệu vào và ra:
Vào I0.0, I0.1
BOOL
Ra
BOOL
Q4.0
2.1.3. Timer.
a. Nguyên lý làm việc chung của bộ Timer.
Lập trình với SPS S7-300
Bộ thời gian Timer là bộ tạo thời gian trễ T mong muốn giữa tín hiệu logic
đầu vào X(t) và đầu ra Y(t)
- 23 -
S7-300 có 5 bộ thời gian Timer khác nhau. Tất cả 5 loại Timer này cùng bắt
đầu tạo thời gian trễ tín hiệu kể từ thời điểm có sườn lên của tín hiệu đầu vào ,
tức là khi có tín hiệu đầu vào U(t) chuyển trạng thái từ logic "0" lên logic"1",
được gọi là thời điểm Timer được kích.
Thời gian trễ T mong muốn được khai báo với Timer bằng giá trị 16 bits bao
gồm hai thành phần :
- Độ phân giải với đơn vị là mS. Timer của S7 có 4 loại phân giải khác nhau là 10ms,
100ms, 1s và 10s.
- Một số nguyên BCD trong khoảng từ 0 đến 999 được gọi là PV ( Preset Value giá trị
đặt trước).
Như vậy thời gian trễ T mong muốn sẽ được tính như sau :
T= Độ phân giải x PV.
Ngay tại thời điểm kích Timer, giá trị PV được chuyển vào thanh ghi 16 bits
của Timer T-Word ( gọi là thanh ghi CV- Curren value- giá trị tức thời). Timer
sẽ ghi nhớ khoảng thời gian trôi qua kể từ khi kích bằng cách giảm dần một
cách tương ứng nội dung thanh ghi CV. Nếu nội dung thanh ghi CV trở về bằng 0 thì
Timer đã đạt được thời gian mong muốn T và điều này được báo ra ngồi bằng cách
thay đổi trạng thái tín hiệu đầu ra Y(t). Việc thơng báo ra ngồi bằng cách đổi trạng
thái tín hiệu dầu ra Y(t) nh- thế nào cịn phụ thuộc vào loại Timer được sử dụng.
Bên cạnh sườn lên của tín hiệu đầu vào U(t), Timer cịn có thể kích bằng
sườn lên của tín hiệu kích chủ động có tên là tín hiệu ENABLE nếu như tại thời
điểm có sườn lên của tín hiệu ENABLE, tín hiệu đầu vào U(t) có gic là "1".
Từng loại Timer được đánh số từ 0 đến 255 (tuỳ thuộc vào từng loại CPU).
Một Timer được đặt tên là Tx, trong đó x là số hiệu của Timer ( 0<=x<=255).
Ký hiệu Tx cũng đồng thời là tín hiệu hình thức của thanh ghi CV (T-Word) và đầu ra
T-bits của Timer đó . Tuy chúng có cùng địa chỉ hình thức , nhưng TWord và T-bits
- 24 vẫn được phân biệt với nhau nhờ kiểu lệnh sử dụng toán hạng Tx. Khi dùng làm việc
với từ Tx đ-ợc hiểu là T-Word còn khi làm việc với điểm thi Tx được hiểu là T-bit.
Để xóa tức thời trạng thái của T-word và T-bit người ta sử dụng một tín hiệu
reset Timer . Tại thời điểm sườn lên của tín hiệu này giá trị T-Word và T-bit
đồng thời có giá trị bằng 0 tức là thanh ghi tức thời CV được đặt về 0 và tín hiệu đầu ra
cũng có trạng thái Logic là "0". Trong thời gian tín hiệu Reset có giá trị logic là "1"
Timer sẽ khơng làm việc.
b. Khai báo sử dụng:
Các tín hiệu điều khiển cho một bộ Timer phải được khai báo bao gồm các
bước sau:
- Khai báo tín hiệu ENABLE nếu muốn sử dụng tín hiệu chủ động kích.
- Khai báo tín hiệu đầu vào U(t).
- Khai báo thời gian trễ mong muốn TW.
- Khai báo loại Timer được sử dụng (SP, SE, SD, SS, SF).
- Khai báo tín hiệu xố Timer nếu muốn sử dụng chế độ Reset chủ động.
Trong các bước trên thì bước 1 và 5 có thể bỏ qua .
- Dạng dữ liệu vào / ra của bộ Timer:
S
Bộ thời gian SP:
-Sơ đồ khối:
:
BOOL BI
(DUAL):
TW:S5TIME
BCD
(DEZ)
R : BOOL
Q : BOOL
WORD
:
WORD
- 25 - Nguyên lý làm việc:
Tại thời điểm s-ờn lên của tín hiệu vào SET thời gian sẽ đựơc tính đồng thời
giá trị Logic ở đầu ra là "1". Khi thời gian đặt kết thúc giá trị đầu ra cũng trở về 0.
Khi có tín hiệu RESET (R) thời gian tính lập tức trở về 0 và tín hiệu đầu ra
cũng giá trị là "0".
-Trường hợp không sử dụng các tín hiệu đầu vào SET(S), RESET ( R), BI và
BCD ta sử dụng khối Timer SI sau:
Tín hiệu đầu vào I0.0 chính là tín hiệu kích.
S5T#2s là thời gian đặt 2s
Tín hiệu ra của bộ thời gian tác động tới đầu ra Q4.0
Bộ thời gian SE
-Nguyên lý làm việc: