Báo cáo đồ án Hệ thống nhúng: Đề tài: Thiết kế hệ thống hướng sáng cho pin năng lượng mặt trời
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (3.27 MB, 32 trang )
ĐỒ ÁN
THIẾT KẾ
HỆ THỐNG NHÚNG
GVHD: TS. Nguyễn Ngọc Minh
Sinh viên thực hiện: Đinh Quang Tùng - B17DCDT209
Nguyễn Trọng Tuấn - B17DCDT205
Trần Đức Hiếu – B17DCDT07
Phạm Minh Hiếu - B17DCDT074
Đề tài:
Thiết kế hệ thống hướng sáng
cho pin năng lượng mặt trời
1
TỔNG QUAN
VỀ ĐỀ TÀI
2
CƠ SỞ LÝ
THUYẾT
3
4
THIẾT KẾ MƠ
HÌNH
PHẦN KẾT
LUẬN
Chương I. Tổng Quan về đề tài
1.1
Đặt vấn đề
1.2
Mục tiêu nhiệm vụ
Đặt vấn đề
1.1
+) Các nguồn năng lượng không tái tạo ngày càng giảm, việc
sử dụng các nguồn năng lượng tái tạo để sản xuất điện ngày
càng tăng. Các tấm pin mặt trời đang trở nên phổ biến hơn
từng ngày.
+) Mặt trời ln chuyển động nên địi hỏi các tấm pin cần
chuyển động theo để đón nhận được tối đa ánh nắng để đạt
hiệu quả cao nhất. Đồ án này mô tả cách thức làm quay tấm
pin năng lượng mặt trời theo hướng tối ưu nhất.
1.2
MỤC TIÊU, NHIỆM VỤ
NGHIÊN CỨU
+) Nâng cao hiệu suất chuyển đổi của pin năng
lượng mặt trời bằng việc điều khiển vị trí tấm pin
ln vng góc với tia sáng mặt trời chiếu tới
+) Thiết kế, chế tạo, mơ phỏng hồn chỉnh hệ thống
điều khiển, điều hướng pin năng lượng mặt trời.
Chương II. Cơ sở lý thuyết
2.1
Một số
phương pháp
tăng hiệu suất
cho pin
2.2
Các phương án
thiết kế
2.3
Nghiên cứu
về cảm biến cho
hệ thống
2.4
Tổng quan về linh
Cơ sở lýkiện
Học tập
thuyết GUI
2.1. Một số phương pin pháp tăng hiệu suất cho pin
2.2.1
Nguyên lý hoạt động
pin mặt trời
2.2.2
Một số phương pháp
tăng hiệu suất pin
Nguyên lý hoạt động của pin NLMT
- Pin năng lượng mặt trời (hay pin quang điện,
tế bào quang điện), là thiết bị bán dẫn chứa
lượng lớn các tế bào quang điện, duới sự hiện
diện của ánh sáng mặt trời có khả năng tạo ra
dòng điện sử dụng được.
- Lớp P chứa các lỗ trống, lớp N chứa các electron
tự do, Khi 2 lớp P-N cạnh nhau, nó sẽ bị ngăn cách
ở lớp tiếp giáp (vùng nghèo).
- Khi được chiếu ánh sáng mặt trời, hay bị các hạt
photon va đập, làm cho lớp tiếp giáp này bị tách ra.
- Khi đó, ta nối dây điện vào 2 cực, electron tự do
sẽ chạy qua dây dẫn và sinh ra điện
Một số phương pháp tăng hiệu quả cho pin
✔ Phủ silic dioxit lên bề mặt pin
✔ Vật liệu composite hybrid.
✔ Vệ sinh bề mặt pin thường xuyên
2.2 CÁC PHƯƠNG ÁN THIẾT KẾ
Có rất nhiều phương án thiết kế cho hệ
thống quay một trục và hai trục.
Tuy nhiên để tăng tối đa hiệu suất cũng
như thuận tiện và độ chính xác cao thì hệ
thống hai trục quay là tối ưu.
2.3 NGHIÊN CỨU VỀ CẢM BIẾN CHO HỆ THỐNG
2.3 NGHIÊN CỨU VỀ CẢM BIẾN CHO HỆ THỐNG
4 quang trở phối hợp với vách ngăn
có nhiệm báo về cho MCU xem ánh
sáng hiện tại đang ở hướng nào.
Cách thức này đơn giản, dễ thực
hiện, tuy nhiên phải lựa chọn chất
lượng 4 quang trở và 4 điện trở có
giá trị càng giống nhau càng tốt để
tránh sai số
2.4. TỔNG QUAN VỀ LINH KIỆN
2.4.1
Danh sách linh kiện
2.4.2
Thông tin và vai trò
của các linh kiện
Danh sách linh kiện
Tên linh kiện
Số lượng
Adruino Uno R3
ESP 8266
Pin NLMT
Động cơ servo
Quang trở
Điện trở
LCD 16x2
I2C
Mạch sạc pin 3,7V
Diode
Pin 18650 + đế pin
Module Relay
1
1
1
2
4
4
1
1
1
1
1
1
Thơng tin và vai trị các linh kiện
Adruino Uno R3
Các chân năng lượng:
+ GND (Ground): cực âm của nguồn điện cấp cho Arduino UNO.
+ 5V: cấp điện áp 5V đầu ra
+ 3.3V: cấp điện áp 3.3V đầu ra
+ Vin (Voltage Input): để cấp nguồn ngoài cho Arduino UNO,
+ IOREF: điện áp hoạt động của vi điều khiển trên Arduino UNO
có thể được đo ở chân này
+ RESET: việc nhấn nút Reset trên board để reset vi điều khiển
tương đương với việc chân RESET được nối với GND qua 1
điện trở 10KΩ.
Thơng tin và vai trị các linh kiện
Adruino Uno R3
Một số chân digital có các chức năng đặc biệt :
+ 2 chân Serial: 0 (RX) và 1 (TX): dùng để gửi (transmit – TX)
và nhận (receive – RX) dữ liệu TTL Serial.
+ Chân PWM (~): 3, 5, 6, 9, 10, và 11: cho phép bạn xuất ra
xung PWM với độ phân giải 8bit.
+ Chân giao tiếp SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK).
+ LED 13: Khi bấm nút Reset, bạn sẽ thấy đèn này nhấp nháy
để báo hiệu.
Thơng tin và vai trị các linh kiện
Esp 8266
Thơng số kỹ thuật:
WiFi: 2.4 GHz hỗ trợ chuẩn 802.11
Điện áp hoạt động: 3.3V
Điện áp vào: 5V thông qua cổng USB
Số chân I/O: 11 (tất cả các chân I/O đều có
Interrupt/PWM/I2C/One-wire, trừ chân D0)
Số chân Analog Input: 1 (điện áp vào tối đa 3.3V)
Bộ nhớ Flash: 4MB
Giao tiếp: Cable Micro USB ( tương đương cáp sạc điện
thoại )
Hỗ trợ bảo mật: WPA/WPA2
Tích hợp giao thức TCP/IP
Thơng tin và vai trị các linh kiện
LCD
Thơng số kỹ thuật
Điện áp hoạt động: 5V.
Kích thước: 80x36x12.5mm
Chữ đen, nền xanh lá.
Khoảng cách giữa hai chân kết nối là 0.1 inch.
Tên các chân được ghi ở mặt sau của màn hình LCD.
Có đèn led nền, có thể dùng biến trở hoặc PWM điều
chỉnh độ sáng.
Có thể được điều khiển với 6 dây tín hiệu.
Có bộ kí tự được xây dựng hỗ trợ tiếng Anh và tiếng
Nhật.
Thơng tin và vai trị các linh kiện
Động cơ Servo
Động cơ servo là một phần của hệ thống vịng
kín và bao gồm một số bộ phận là mạch điều
khiển, động cơ servo, trục, chiết áp, bánh răng
truyền động, bộ khuếch đại và bộ mã hóa hoặc
bộ giải.
Động cơ servo là một thiết bị điện khép kín. Nó
được dùng để xoay các bộ phận của máy với
hiệu suất cao và độ chính xác cao.Trục đầu ra
của động cơ này có thể được di chuyển đến
một góc, vị trí và vận tốc cụ thể mà động cơ
thơng thường khơng có. Động cơ Servo sử
dụng một động cơ thơng thường và kết hợp nó
với một cảm biến để phản hồi vị trí.
Thơng tin và vai trị các linh kiện
Module Relay
Relay (rơ-le) là một loại linh kiện điện tử thụ
động rất hay gặp trong các ứng dụng thực tế
liên quan đến công suất và cần sự ổn định cao,
ngồi ra nó rất dễ dàng bảo trì. Rơ-le là một loại
cơng tắc (khóa K) được kích hoạt bằng điện
thay vì dùng tay kích hoạt. Chính vì vậy, rơ-le
được dùng làm cơng tắc điện tử.
Chương II. Thiết kế mơ hình
3.1
3.2
3.3
Sơ đồ khối
Ngun lí
hoạt động
Sơ đồ nguyên lí
và PCB
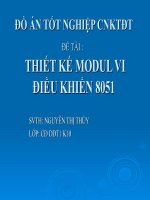
Sơ đồ khối
Nguyên lý hoạt động
- Khi ánh nắng mặt trời chiếu vào, 4 cảm biến sẽ ghi nhận 4 giá trị điện áp gửi về cho MCU khác nhau,
tương ứng với các cảm biến ở các vị trí: trên bên phải, trên bên trái, dưới bên phải, dưới bên trái.
- Sau đó, hệ thống sẽ lấy giá trị trung bình của 2 cảm biến bên trên, dưới, trái và phải để so sánh.
- Nếu giá trị bên trên lớn hơn bên dưới => ánh sáng đang chiếu mạnh hơn vào 2 cảm biến bên dưới, 2
cảm biến bên trên bị che khuất bởi tấm chắn => điều khiển động cơ xoay hệ thống lên trên và ngược lại.
- Nếu giá trị bên trái lớn hơn lên phải, điều khiển động cơ xoay sang trái và ngược lại.
- Khi tất cả các giá trị ở 4 cảm biến đều cân bằng, động cơ sẽ dừng xoay và pin sẽ được hướng vng
góc với ảnh nắng mặt trời để bắt đầu nạp năng lượng.
- Lúc này, LCD sẽ hiển thị giá trị điện áp của pin năng lượng mặt trời, đồng thời giá trị điện áp này cũng
được đẩy lên một webserver đã được tạo thơng qua ESP8266. Bên cạnh đó, mạch sạc cũng được nối với
pin năng lượng mặt trời và lúc này ta có thể sử dụng để sạc các loại pin rời, pin điện thoại,…
Sơ đồ nguyên lý và PCB