ĐO VẬN TỐC VÒNG QUAY VÀ GÓC QUAY
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (434.3 KB, 15 trang )
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
62
BI 4 : O VN TC VềNG QUAY V GểC QUAY
GII THIU
Cm bin o vn tc vũng quay v gúc quay rt quan trng trong
quỏ trỡnh m bo an ton nh theo dừi hot ng ca cỏc mỏy múc, thit b.
Trong chuyn ng thng chuyn xang chuyn ng gúc quay v vũng quay.
MC TIấU BI HC
Sau khi hc xong bi ny hc viờn cú kh nng:
- ỏnh giỏ/xỏc nh c v trớ, nhim v v ng dng ca cỏc b cm bin o
vn tc gúc quay v vũng quay.
- Mụ t c chc nng, nhim v v cỏc iu kin lm vic ca cỏc b cm
bin o vn tc quay v vũng quay.
- Bit c phm vi ng dng ca cỏc b cm bin o v
n tc quay v vũng
quay.
NI DUNG
* Mt s phng phỏp o vn tc vũng quay c bn.
* Cm bin o gúc vi t hp cú in tr t.
* Cỏc bi thc hnh ng dng.
HOT NG I : HC Lí THUYT TRấN LP
1. Mt s phng phỏp o vn tc vũng quay c bn.
Trong cụng nghip cú rt nhiu trng hp cn o vn tc quay ca mỏy,
ngi ta thng theo dừi tc quay ca mỏy vỡ lý do an ton hoc khng
ch cỏc iu kin t trc cho hot ng ca mỏy múc, thit b. Trong chuyn
ng thng vic o vn tc di cng thng c chuyn xang
o vn tc quay.
Bi vy cỏc cm bin o vn tc gúc chim v trớ u th trong lnh vc o tc
.
1.1. o vn tc vũng quay bng phng phỏp Analog.
* Tc k mt chiu (mỏy phỏt tc).
Mỏy phỏt tc l mỏy phỏt in mt chiu, cc t l nam chõm vnh cu,
in ỏp trờn cc mỏy phỏt t l vi tc quay c
a nú, mỏy phỏt tc ni
cựng trc vi phanh hóm in t v cựng trc vi ng c do ú tc quay ca
nú chớnh l tc quay ca ng c, tc ny t l vi in ỏp ca mỏy phỏt
tc , dựng Vmột in t hoc ng h o tc ni vi nú cú th o c tc
ca
ng c. Giỏ tr in ỏp õm hay dng ph thuc vo chiu quay.
0
0
2
Nn
n
E
r
==
Trong ú : N l s vũng quay trong mt giõy.
l vn tc gúc ca rụto.
n l tng s dõy chớnh trờn rụto.
0
l t thụng xut phỏt t cc nam chõm.
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
63
Cỏc phn t cu to c bn ca mt tc k dũng mt chiu nh hỡnh 4.1
* Tc k dũng xoay chiu.
Tc k xoay chiu cú u im l khụng cú c gúp in v chi than
nờn cú tui th bn hn, khụng cú tng, gim in ỏp trờn chi than. Xong
nhc im l mch in phc tp hn, ngoi ra xỏc nh biờn cn phi
chnh lu v lc tớn hiu.
- Mỏy phỏt ng b: l mt loi mỏy phỏt i
n xoay chiu c nh (hỡnh
4.2), rụto ca mỏy phỏt c gn ng trc vi thit b cn o tc , rụto l
mt nam chõm hoc nhiu nam chõm nh, stato l phn cm, cú th l 1 pha
hoc 3 pha, l ni cung cp sut in ng hỡnh sin cú biờn t l vi tc
quay ca rụto.
tEe = sin
0
mà
.
10
KE = ;
.
2
K=
Trong ú K1 v K2 l cỏc thụng s c trng cho mỏy phỏt.
u ra in ỏp c chnh lu thnh in ỏp mt chiu, in ỏp ny khụng ph
thuc vo chiu quay v hiu sut lc gim i tn s thp, tc quay cú th xỏc
nh c bng cỏch o tn s ca sc in ng. Phng phỏp ny rt quan
trng khi khong cỏch o ln, tớn hi
u t mỏy phỏt ng b cú th truyn i xa
v suy gim tớn hiu trờn ng i khụng nh hng n chớnh xỏc ca phộp
o (vỡ o tn s).
ơ
- Mỏy phỏt kgụng ng b: Cu to ca mỏy phỏt khụng ng b tng t
nh ng c khụng ng b (hỡnh 4.3). Rụto l 1 hỡnh tr bng kim loi mng
c quay vi vn tc cn o, khi lng v quỏn tớnh khụng ỏng k, rtato lm
bng thộp lỏ k thut in, trờn cú t 2 cun dõy c b trớ nh hỡnh v, cun
Cổ
g
ó
p
Chổi
q
ué
t
Stato
Rôto
Dây dẫn
H
ình 4.1: Cấu t
ạ
o của má
y
p
hát dòn
g
1 chiều
Hình 4.2
e
m
Cuộn kích
Cuộn đo
Rôto
V
Hình 4.3: Cấu tạo của 1 máy phát
khô đồ bộ
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
64
th nht l cun kớch t, c cung cp mt in ỏp nh mc cú biờn v tn
s khụng i.
tCosVv
eee
=
Cun dõy th 2 l cun dõy o, gia 2 u ca cun dõy ny s xut hin
sc in ng cú biờn t l vi vn tc gúc cn o.
() ()
+=+= tVktEe
eeemm
coscos
Do
,
Ư kVkE
em
== m k l hng s ph thuc vo cu trỳc ca mỏy ;
l lch pha ; khi o Em s xỏc nh c
.
1.2. o vn tc vũng quay bng phng phỏp quang in t.
* Dựng b cm bin quang tc vi a mó húa.
Encoder l thit b cú th phỏt hin s chuyn ng hay v trớ ca vt,
Encoder s dng cỏc cm bin quang snh ra chui xung, t ú chuyn sang
phỏt hin s chuyn ng, v trớ hay hng chuyn ng ca vt th.
Ngun sỏng c lp t sao cho ỏnh sỏng liờn tc c tp trung xuyờn qua
a, b phn thu nhn ỏnh sỏng c lp t mt cũn li ca a sao cho cú th
nhn c ỏnh sỏng, a c lp t n trc ng c hay thit b khỏc cn xỏc
nh v trớ sao cho khi trc quay, khi a quay sao cho l, ngun sỏng, b phn
nhn ỏnh sỏng thng hng thỡ tớn hiu xung vuụng sinh ra.
Khuyt im: c
n nhiu l nõng cao chớnh xỏc nờn d lm h hng a
quay.
* a mó húa tng i.
Encoder vi mt b xung thỡ s khụng th phỏt hin c chiu quay, hu
ht cỏc Encoder mó hoỏ u cú b xung th 2 lch pha 900 so vi b xung th
nht v mt xung xỏc nh thi gian Encoder quay mt vũng.
Nguồn sáng
Đĩa
q
ua
y
Bộ thu
Són
g
sin
Són
g
vuôn
g
Mạch tạo
xung vuông
H
ình 4.4: Sơ đồ hoạt độn
g
đĩa
q
uan
g
mã hoá
H
ình 4.5: Sơ đồ thu phát Encoder tơng đối
Trục quay
Đĩa
q
ua
y
Khe hở
p
ha A
Khe hở
p
ha
B
Bộ phận phát hiện
(
nh
ậ
n ánh sán
g)
Bộ phận phát
(
n
g
uồn sán
g)
Khe hở
p
ha Z
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
65
Xung A, xung B v xung iu khin, nu xung A xy ra trc xung B, trc
s quay theo chiu kim ng h, v ngc li. xung Z xỏc nh ó quay xong
mt vũng.
Gi Tn l thi gian m xung, N0 l s xung trong mt vũng ( phõn gii
ca b cm bin tc , ph thuc vo s l), N l s xung trong thi gian Tn.
(vũng/phỳt).
* a mó húa tuyt i.
khc phc nh
c im chớnh ca a mó hoỏ tng i l khi mt
ngun s m s b mt, nh vy khi cỏc c cu ngng hot ng vo bui ti
hay khi bo dng sa cha thỡ khi bt ngun tr li Encoder s khụng th xỏc
nh chớnh xỏc v trớ c cu.
a mó hoỏ tuyt i c thit k luụn xỏc nh c v trớ vt mt
cỏch chớnh xỏc.
a Encoder tuyt i s dng nhiu vũng phõn on theo hỡnh ng tõm
gm cỏc phõn on chn sỏng v khụng chn sỏng.
- Vũng trong cựng xỏc nh a quay ang nm na vũng trũn no.
- Kt hp vũng trong cựng vi vũng tip theo s xỏc nh a quay ang
nm 1/4 vũng trũn no.
Pha A
Pha B
Pha Z
Một chu kỳ
360
0
điện
Khác pha 90
0
H
ình 4.
6
: Dạn
g
són
g
ra của Encoder 2 bộ xun
g
H
ình 4.7: Sơ đồ thu
p
hát Encoder tu
y
ệt đối (sử dụn
g
mã Gra
y
)
Trục quay
Đĩa quay
Bộ phận nhận
Bộ phận phát
Khe hở (các đoạn
không chắn sóng)
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
66
- Cỏc rónh tip theo cho ta xỏc nh c v trớ 1/8, 1/16 vv ca vũng
trũn, vũng phõn on ngoi cựng cho ta chớnh xỏc cui cựng.
- Loi Encoder ny cú ngun sỏng v b thu cho mi vũng nu Encoder
cú 10 vũng s cú 10 b ngun sỏng v thu, nu Encoder cú 16 vũng s cú 16 b
ngun sỏng v thu.
- m o vn tc hay v trớ (gúc quay), cú th s dng mó nh phõn
hoc mó Gray. Tuy nhiờn thc t ch cú mó Gray c s dng ph bin.
1.3. o vn tc vũng quay vi nguyờn tc i
n tr t.
* Cỏc n v t trng v nh ngha.
- T trng: L mt dng vt cht tn ti xung quanh dũng, hay núi chớnh
xỏc l xung quanh cỏc ht mang in chuyn ng, tớnh cht c bn ca t
trng l tỏc dng lc lờn dũng in, lờn nam chõm.
- Cm ng t B: V mt gõy ra lc t, t trng c c trng bng vộct
cm
ng t B.
Trong h thng n v SI n v cm ng t B l T (Tesla).
1T = 1Wb/m
2
= 1V.s/m
2
.
- T thụng: T thụng gi qua din tớch dS l i lng v giỏ tr bng: .
Trong úl vộc t cm ng t ti 1 im bt kỡ trờn din tớch y.l vộc t cú
phng ca vộc t phỏp tuynvi din tớch ang xột, chiu l chiu dng ca
phỏp tuyn, ln bng ln din tớch ú.
Trong h thng n v
SI, n v t thụng l Wb (Weber), nu t thụng thay i
1 n v trong thi gian 1 giõy (1s), in ỏp cm ng sinh ra trong cun dõy l 1
vụn: 1Wb = 1Vs.
- Cng t trng: Cng t trng H c c trng cho t
trng do riờng dũng in sinh ra v khụng ph thuc vo tớnh cht mụi trng
trong ú t dũng in.
Trong h thng n v SI n v ca cng t tr
ng l A/m.
* Cm bin in tr t.
Cm bin in tr t l mt linh kin bỏn dn cú 2 cc in, in tr ca
nú gia tng di tỏc ng ca t trng, trong trng hp t trng tỏc dng
thng gúc mt phng ca cm bin ta cú nhy ln nht, chiu ca t trng
khụng
nh hng gỡ n hiu ng in tr t trong trng hp ny.
ln ca tớn hiu ra ca cm bin in tr t khụng ph thuc vo tc
quay, khỏc vi trng hp cm bin in cm, ln tớn hiu ra quan h trc
tip vi tc quay, vỡ vy ũi hi cỏc thit b i
n t phc tp cú th thu
nhn c cỏc tớn hiu trờn 1 di in ỏp rng.
Ngc li vi cm bin in tr t, tớn hiu ra c hỡnh thnh bi s i
hng ca ng cm ng t thay i theo v trớ bỏnh rng (Bending of
magnetic field lines), tớn hiu ra ca cm bin vn c hỡnh thnh dự i tng
khụng di chuyn rt chm.
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
67
- Cm bin in tr t vi vt liu InSb/NiSb.
+ Hiu ng in tr t vi vt liu InSb/NiSb:
Vt liu bỏndn InSb liờn kt III V cú linh ng rt ln. Trong vt liu bỏn
dn, di tỏc dng ca t trng hng dch chuy
n ca cỏc in tớch b lch i
1 gúc ( tag = B).Do s chờnh lch ny on ng dch chuyn ca electron di
hn, kt qu l in t cm bin gia tng di tỏc dng ca t trng, hiu
-Max
Các bánh
Đờng cảm ứng
Nam châm
H
ình 4.8: Tín hiệu tạo ra bởi cảm ứn
g
điện
V
+Ma
-Max
0
a b
c
d
t
H
ình 4.9
NiSb
InSb
Dòng điện
B
I
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
68
ng ny cú th s dng trong thc t, gúc cn phi ln hn. Trong kim loi gúc
ny rt bộ, vi germanium gúc lch khong 200, trong Indiumantimon do
linh ng ca electron rt cao nờn gúc lch = 800, vi B = 1T.
to con ng dch chuynca electron cng di cng tt di tỏc
dng ca t trn, nh vy ngừ ra s cú s thay i in tr ln hn, cm bin
c kt cu nh
hỡnh v 4.9. Nhiu phin InSb (b rng vi (m) c ghộp ni
tip nhau, gia cỏc phin ny l mng kim loi.
Trong thc t vi k thut luyn kim, ngi ta to ra nhng cõy kim bng
Nickelantimon nm bờn trong InSb cú chiu song song vi 2 cc in, mt ớt
NiSb cho vo trong InSb chy lng v qua cỏc cụng on lm ngui, vụ s cõy
kim NiSb c hỡnh thnh bờn trong InSb. Cỏc cõy kim ny cú ng kớnh
khong 1 (m v di 50 (m, cỏc cõy kim ny dn in rt tt v hu nh khụng cú
in ỏp ri trờn nú.
Mt in tớch phõn b khụng u trong InSb do tỏc dng ca t trng,
s c phõn b u trờn cỏc cõy kim, nh th ta cú s phõn b in tớch ni
khi u vựng 1 ging nh ni khi u vựng 2.
in tr t cú th coi nh 1 hm ca cm ng t theo cỏch tớnh gn ỳng
()
22
0
.1 BKRR
B
+=
Trong ú K l hng s vt liu cú tr s khong 0,85.
in tr cm bin nm trong khong 10 dn 500(, din tớch ct ngang ca bỏn
dn cng nh cng tt, tuy nhiờn chiu rng khụng th nh hn 80 (m.
- Cm bin in tr t vi vt liu Permalloy.
+ Hiu ng in tr t vi vt liu Permalloy
Mt mng mng vt liu st t gi l Permalloy (20% Fe ; 80% Ni). Khi khụng
cú s hin din ca t trng, vộc t t hoỏ bờn trong vt liu nm song song
vi dũng in. Vi t trng nm song song vi mt phng mng mng nhng
thng gúc vi dũng in, vộc t t hoỏ s quay i 1 gúc, kt qu l in tr ca
Permalloy thay i theo
.
2
00
cosRRR +=
H
ình 4.10: Hiệu ứn
g
điện trở từ trên Permallo
y
Sự từ hoá
Dòng điện
Permalloy
H
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
69
min
0
max
0
90
0
R
R
=
=
R
0
v
0
R
l cỏc thụng s ph thuc vo cht liu Permalloy.
0
R
khong 2 n
3% R.
Nguyờn tc ny c ng dng o tc quay v gúc quay.
+ Tuyn tớnh hoỏ c tớnh ca cm bin.
Theo phng trỡnh bc 2: thỡ in tr cm bin in tr t khụng tuyn
tớnh (hỡnh 4.12), 1 cm bin tin li trong s dng thỡ tt nht l c tuyn
ca nú tuyn tớnh, vỡ vy bi
n phỏp thit k tt hn l iu cn thit.
Hiu ng in tr t cú th c tuyn tớnh hoỏ bng cỏch t 1 mng
mng nhụm gi l barber.
2. Cm bin o gúc vi t hp cú in tr t.
- Nguyờn tc.
T cụng thc c bn:
2
00
cosRRR += .
Ta cú th gia R v cú s liờn h gn ỳng:
2R .
Da trờn nguyờn tc ny, cm bin cú th o gúc m khụng cn s ng chm.
2.1. Cỏc loi cm bin KM110BH/2 ca hóng Philips Semiconductor.
Loi cm bin KM110BH/21 cú 2 dng KMB110BH/2130 v
KMB110BH/2190. Tuy cú thang o khỏc nhau nhng mch in nh nhau (hỡnh
4-13).
KMB110BH/2130 c ch to vi thang o nh hn cú khuych i ln
hn, o t -15
0
n +15
0
. Tớn hiu ra tuyn tớnh ( phi tuyn ch 1%).
KMB110BH/2190 o t -45
0
n +45
0
, tớn hiu ra hỡnh sin.
C 2 cm bin trờn u cú tớn hiu ra dng Analog.
Ngoi 2 cm bin ny cũn cú cỏc dng cm bin thit k mi
KM110BH/23 v KM110BH/24 (xem bng 4-1).
H
ình 4.11
Barber
Permallo
Sự từ hoá
Hình 4.12: a/ Đặc tuyến R-H của
cảm biến loại tiêu chuẩn
b/ Đặc tuyến R-H của cảm biến loại
có barber poles
R
R
0
0
a
b
-1 -0,5 0 0,5
Hy
Ho
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
70
Bảng 4-1:
Thông số
KM110BH
Đơn vị
2130 2190 2270 2390 2430 2470
Thang đo 30 90 70 90 30 70 0,001
Điện áp ra
0,5 tới
4,5
0,5 tới
4,5
-
0,5 tới
4,5
0,5 tới
4,5
0,5 tới
4,5
V
Dòng điện
ra
4 tới
20
mA
Đặc tuyến
ngõ ra
Tuyến
tính
Hình
sin
Hình
sin
Tuyến
tính
Tuyến
tính
Hình
sin
Điện áp
hoạt động
5 5 8,5 5 5 5 V
Nhiệt độ
hoạt động
-40 tới
+125
-40 tới
+125
-40 tới
+125
-40 tới
+125
-40 tới
+125
-40 tới
+125
0
C
Độ phân
giải
0,001 0,001 0,001 0,001 0,001 0,001 Độ
2.2. Các loại cảm biến KMA10 và KMA20.
KMA10 và KMA20 là loại cảm biến đo góc (không cần đụng chạm) được thiết
kế để có thể hoạt động trong môi trường khắc nghiệt hơn, ứng dụng trong lĩnh
vực tự động và công nghiệp.
Hai loại cảm biến KMA10 và KMA20 được thiết kế để phát triển bởi sự hợp tác
giữa Philips Semiconductor và AB Electronic.
KMA10 cho tín hiệu dưới dạng dòng điện.(KMA10/70 phát triển từ
loại
KM110BH/2270).
KMA20 cho tín hiệu ra dưới dạng điện áp, KMA20/30 phát triển từ loại
KM110BH/2430, KMA20/70 từ loại KM110BH/2470, còn KMA20/90 phát
triển từ loại KMA20/2390. Tuy nhiên tín hiệu từ KMA20/30 thì tuyến tính và từ
KMA20/70 thì hình sin.
Thông số KMA10/70 KMA20/30 KMA20/70 KMA20/90 Đơn vị
Thang đo 70 30 70 90 Độ
Điện áp ra - 0,5 tới 4,5 0,5 tới 4,5 0,5 tới 4,5 V
Dòng điện 4 tới 20 - - - mA
sensor
Sngle range
T
emperature
omperation
Qu
r
e
r
c
miter
V
CC
V
o
GND
Hình 4-13: Sơ đồ khối của các loại cảm biến
KM110BH/21, KM110BH/24 và KM110BH/2390
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
71
ra
Đặc tuyến
ngõ ra
Hình sin Tuyến tính Hình sin Tuyến tính
Điện áp
hoạt động
8,5 5 5 5 V
Nhiệt độ
hoạt động
-40 tới +100 -40 tới +125 -40 tới +125 -40 tới +125
0
C
Độ phân
giải
0,001 0,001 0,001 0,001 Độ
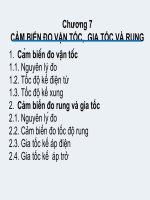
2.3. Máy đo góc tuyệt đối (Resolver).
Máy đo góc tuyệt đối cấu tạo gồm 2 phần, phần động gắn liền với trục
quay động cơ chứa cuộn sơ cấp được kích thích bằng sóng mang tần số 2 – 10
Khz qua máy biến áp quay (Hình 4-14a). Phần tĩnh có 2 dây thứ cấp (cuộn sin
và cuộn cos) đặt lệch nhau 90
0
, đầu racủa dây quấn thứ cấp ta thu được 2 tín
hiệu điều biên UU0siinωtsin∂ và UU0sinωtcos∂ (hình 4-15b). Đường bao của
kênh tín hiệu ra chứa thông tin vị trí tuyệt đối (góc ∂) của rôto máy đo,có nghĩa
là vị trí tuyệt đối của rôto động cơ (hình 4-15c)
Có 2 cách thu thập thông tích về ∂:
- Hiệu chỉnh sửa sai góc thu được trên cơ sở so sánh góc và được cài đặt sẵn
trong 1 số vi mạch sẵn có, các vi này cho tín hiệu góc dạ
ng số (độ phân giải 10 –
16 bit/1 vòng và tốc độ quay dưới dạng tương tự.
- Dùng 2 bộ chuyển đổi tương tự - số để lấy mẫu trực tiếp từ đỉnh tín hiệu
điều chế. Trong trường hợp này cần đồng bộ chặt chẽ giữa thời điểm lấy mẫu và
khâu tín hiệu kích thích 2 – 10 kHz.
Sin
Kích thích
2 – 10kHz
K
ích thích
Biến áp
Rôto
Trục Trục
Cos
Cos
Cos
Sin
a/
b/
c/
Hình 4-15:Máy đo góc tuyệt đối. a/ cấu tạo;
b/ Sơ đồ nguyên lý; c/ Hai kênh tín hiệu ra
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
72
3. Các bài thực hành ứng dụng.
3.1. Thực hành cảm biến đo góc.
3.1.1. Thực hành với encoder đĩa mã hóa tương đối.
* Mục đích – yêu cầu
- Khảo sát encoder E6A2 – CW3C
- Đo tốc độ động cơ với encoder loại đĩa mã hóa tương đối.
* Thiết bị : encoder E6A2 – CW3C, máy đo tốc độ góc H7ER, động cơ,
các thiết bị cần thiết khác.
* Thực hiện :
* Ghi nhận các thông số kỹ thuật trên thiế
t bị :
Điện áp hoạt động :
Độ phân giải :
* Vẽ sơ đồ mắc cảm biến :
* Kết nối encoder với động cơ cần đo tốc độ (về mặt cơ)
* Kết nối cảm biến với máy đo tốc độ như hình vẽ 4-16
* Ghi nhận thông số tốc độ đo được
3.1.2.
Thực hành với encoder tuyệt đối.
* Mục đích – yêu cầu
- Khảo sát encoder E6CP – AG5C - C
- Đo tốc độ động cơ với encoder
* Thiết bị : encoder E6CP – AG5C – C, thiết bị đo vị trí H8PS – 8P Cam,
động cơ và các thiết bị cần thiết khác.
* Máy đo vị trí E6CP – AG5C – C đo từ 0
0
đến 359
0
.
* Thực hiện :
* Ghi nhận các thông số kỹ thuật trên encoder:
Điện áp hoạt động :
Độ phân giải :
* Các thông số kỹ thuật của máy đo vị trí
- Điện áp hoạt động : 24 vôn DC
- Chức năng các chân :
Chân E6CP – AG5C – C
1
Kết nối sẵn bên trong
2
3 2
5
4 2
1
5 2
0
Nâu
Đen
Xanh
5 to 12V DC E6A2 H7ER
Hình 4-16
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
73
6 2
7
7 2
4
8 2
2
9 2
3
10 2
6
11
12 12 vôn tới 24 vôn DC
13 0 vôn
* Vẽ sơ đồ mắc cảm biến :
* Kết nối encoder với động cơ cần đo tốc độ (về mặt cơ)
* Kết nối cảm biến với máy đo tốc độ.
3.2. Thực hành với cảm biến đo vòng quay.
3.2.1. Cảm biến KMI15/1.
* Yêu cầu - mục đích: Khảo sát cảm biến KMI15/1
* Thiết bị : Cảm biến KMI15/1, điện trở 115Ω
, Tụ điện 100nF, đối tượng
dạng thụ động
* Sơ đồ chân
Chân Chức năng
1 V
cc
2 V
-
* Thực hiện lắp mạch :
- Điện áp V
cc
: 12 vôn DC
- Lắp đặt cảm biến như hình vẽ 4-17 ; d = 2,5 mm
- Cho đối tượng quay
- Dùng máy đo dao động kí đo tín hiệu ra
- Vẽ lại dạng sóng
- Ghi nhận các giá trị nhỏ nhất, giá trị trung bình của tín hiệu.
Cảm biến
I
cc
R
L
GND
U
Si
g
nal
V
cc
V
-
Hình 4-17
Cảm biến
Bánh răng
d
d
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
74
3.2.2. Cảm biến đo vòng quay KMI16/1.
* Yêu cầu - mục đích: Khảo sát cảm biến KMI16/1
* Thiết bị: Cảm biến KMI16/1, điện trở 2,7 kΩ, 10 kΩ, tụ điện 2,2nF, đối
tượng dạng thụ động (giống KMI15/1)
* Sơ đồ chân
Chân Ký hiệu Chức năng
1 V
cc
Nối với nguồn DC
2 V
out
Ngõ ra của tín hiệu
3 GND Nối đất
* Thực hiện lắp mạch :
- Điện áp hoạt động V
cc
= 5 vôn DC
- Ghi chú: Cảm biến có thể hoạt động với
điện áp 4,5 vôn đến 16 vôn DC (nhưng
giá trị ngõ ra sẽ thay đổi).
- Lắp đặt cảm biến như hình vẽ 4-18
d = 2,5mm
- Cho đối tượng quay
- Dùng máy đo dao động kí đo tín hiệu ra
- Giá trị điện áp ra ở mức cao:
- Giá trị điện áp ra ở mức thấp:
- Vẽ lại dạng sóng
3.2.3. Thực hành với cảm bi
ến đo góc KM110BH/2430, KM110BH/2470.
* Yêu cầu - mục đích:
Khảo sát cảm biến đo góc KM110BH/2430, KM110BH/2470
* Thiết bị: Nam châm (NdFeB) kích thước 11,2 x 5,5 x 8 mm
Cảm biến đo góc KM110BH/2430, KM110BH/2470
Nguồn 5 vôn DC và vôn kế các thiết bị đo lường cần thiết.
* Các thông số của thiết bị
* Sơ đồ chân
Chân Chú thích
1 Ground
2 V
cc
3 V
0
3 1 2
Hình 4-18
Cảm biến
Bánh răng
d
1
2 3
Kỹ thuật cảm biến Khoa Cơ khí - Động lực Trờng Cao Đẳng Nghề Công Nghệ và Nông Lâm Đông Bắc
75
* Thớ nghim : Ghi nhn cỏc thụng s hot ng ca cm bin
in ỏp hot ng Thang o Dng tớn hiu
KM 110BH/2430
KM 110BH/2470
V mch kt ni cm bin, ngừ ra dựng R
L
= 1,7 k (vụn k o giỏ tr tớn hiu ra
mc song song vi R
L
)
Lp t nam chõm song song vi cm bin (d = 2,5mm)
Thay i v trớ nam chõm, o giỏ tr ngừ ra, v th biu din s thay i ca
giỏ tr ngừ ra theo gúc quay.
HOT NG II: HC VIấN T NGHIấN CU TI LIU
Hc viờn tham kho cỏc ti liu di õy:
1. Cỏc b cm bin trong k thut o lng v iu khin.
Lờ Vn Doanh, Phm Thng Hn, Nguyn Vn Ho, o Vn Tõn
Nh xut bn Khoa hc v k thut H Ni.
2. Cm bin ng dng Dng Minh Trớ - Nh xut bn Khoa hc v k
thut H Ni.
3. Giỏo trỡnh cm bin - Phm Quc Phụ, Nguyn c Chin - Nh xut
bn Khoa hc v k thut H Ni.
4. Giỏo trỡnh cm bin Trung tõm Vit - c phỏt hnh
HOT NG III: HC TP, THC TP TI XNG TRNG
* Ni dung:
- Nghiờn cu ng dng ca tng loi cm bin o tc gúc v vũng quay.
- Tỡm hiu cỏch phõn loi, ng dng ca tng cm bin o gúc v vũng
quay.
1/ Hỡnh thc t chc:
Chia thnh cỏc nhúm nh t 2 n 3 hc sinh di s hng dn ca giỏo viờn.
2/ Dng c, thit b: Cỏc loi cm bin o tc gúc, tc vũng quay, cỏc
tranh, nh v cỏc b
cm bin o tc gúc, vũng quay v cỏch lp t.
3/ Quy trỡnh thc hin:
- Giỏo viờn tp trung c lp hc viờn, s lc v cỏch nhn bit, ng dng, v
cỏch lp t ca cỏc b cm bin o tc gúc v tc vũng quay.
- Giỏo viờn hng dn cỏch kho sỏt, lm mu cỏch lp t cỏc b cm bin o
tc gúc v vũng quay.
- Cui bi hc, giỏo viờn hng d
n kim tra, ỏnh giỏ v nhn xột ti tng hc
viờn trong quỏ trỡnh luyn tp.
Kü thuËt c¶m biÕn – Khoa C¬ khÝ - §éng lùc – Tr−êng Cao §¼ng NghÒ C«ng NghÖ vµ N«ng L©m §«ng B¾c
76
MỤC LỤC
ĐỀ MỤC TRANG
Lời nói đầu : 3
Bài mở đầu : Khái niệm về các bộ cảm biến 5
Bài 1 : Cảm biến nhiệt độ 9
Bài 2 : Cảm biến tiệm cận và các loại cảm biến xác
định vị trí, khoảng cách 34
Bài 3 : Phương pháp đo lưu lượng 49
Bài 4 : Đo vận tốc góc quay và vòng quay 62