nghiên cứu khái quát về máy phát điện đồng bộ – đi sâu phân tích một số hệ thống điều khiển kích từ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.38 MB, 73 trang )
1
LỜI NÓI ĐẦU
Ngày nay, nền kinh tế của nước ta đang trên đà phát triển mạnh mẽ, đời
sống của người dân ngày càng nâng cao. Nhu cầu sử dụng điện năng trong đời
sống sinh hoạt cũng như trong các nghành công nghiệp, nông nghiệp và dịch vụ
là tăng không ngừng. Đây là cơ hội nhưng cũng là thách thức cho ngành điện
với việc phát triển điện năng, phục vụ nhu cầu của xã hội. Một yêu cầu thiết yếu
đặt ra đó chính là việc cung cấp điện một cách liên tục cho những nơi đặc biệt,
những công ty xí nghiệp lớn, bệnh viện …và xa hơn nữa là cung cấp điện năng
cho sinh hoạt khi lưới điện quốc gia bị xảy ra sự cố. Để thực hiện được việc này,
yêu cầu đặt ra là phải năng cao chất lượng điện năng cung cấp điện các hộ tiêu
thụ quan trọng.
Máy phát điện đã trải qua rất nhiều giai đoạn phát triển từ quy mô nhỏ đến
nghiên cứu đến mục đích thương mại hóa. Và máy phát điện đồng bộ được dùng
phổ biến trong các Nhà máy điện công suất trung bình và lớn. Nó ngày càng
khẳng định được vai trò cũng như tầm quan trọng trong việc phát triển xã hội,
nâng cao đời sống nhân dân,…. Vì vậy đòi hỏi yêu cầu đào tạo kỹ sư Điện tự
động công nghiệp phải nắm vững kiến thức cơ bản về cấu tạo máy phát điện
đồng bộ và cách điều khiển nó theo yêu cầu công nghệ.
Sau thời gian học tập tại trường, được sự chỉ bảo hướng dẫn nhiệt tình của
thầy cô giáo trong ngành Điện tự động công nghiệp trường Đại học Hàng Hải
Việt Nam, em đã kết thúc khoá học và đã tích luỹ được vốn kiến thức nhất định.
Được sự đồng ý của nhà trường và thầy cô giáo trong khoa em được giao đề tài
tốt nghiệp: “Nghiên cứu khái quát về máy phát điện đồng bộ – Đi sâu phân tích
một số hệ thống điều khiển kích từ”.
Đồ án tốt nghiệp của em gồm ba chương:
Chương 1. Khái quát về máy phát điện đồng bộ
Chương 2. Biến đổi tín hiệu và khí cụ điện của trạm phát điện
Chương 3. Một số hệ thống kích từ điển hình trong trạm phát điện
Bằng sự cố gắng nỗ lực của bản thân và đặc biệt là sự giúp đỡ tận tình, chu đáo
2
của thầy giáo PGS.TS Hoàng Xuân Bình, em đã hoàn thành đồ án đúng thời
hạn. Do thời gian làm đồ án có hạn và trình độ còn nhiều hạn chế nên không thể
tránh khỏi những thiếu sót.
Em rất mong nhận được sự đóng góp ý kiến của các thầy cô cũng như là
của các bạn sinh viên để bài đồ án này hoàn thiện hơn nữa.
Em xin chân thành cảm ơn thầy giáo PGS.TS Hoàng Xuân Bình, các thầy
cô giáo trong ngành Điện tự động công nghiệp trường Đại học Hàng Hải Việt
Nam đã tạo điều kiện giúp đỡ em trong thời gian qua.
Hải Phòng, ngày 26 tháng 1 năm 2014
Sinh viên thực hiện
Nguyễn Ngọc Tuấn
3
CHƯƠNG 1. KHÁI QUÁT VỀ MÁY PHÁT ĐIỆN ĐỒNG BỘ
1.1. LỊCH SỬ PHÁT TRIỂN CỦA MÁY PHÁT ĐIỆN
1.1.1. Vai trò của máy phát điện trong đời sống của con người
Trong đời sống vật chất đầy đủ tiện nghi với các thiết bị điện thông minh
để thỏa mãn nhu cầu của con người thì điện năng là yếu tố thiết yếu cần phải có.
Nền kinh tế của một đất nước muốn phát triển thì ngành điện là một trong những
yếu tố cần chú trọng hàng đầu, sau đó mới chuyển hướng sang các ngành công
nghiệp sản xuất, văn hóa, khoa học và công nghệ…Tóm lại, điện năng là nguồn
năng lượng cần có để duy trì đời sống vật chất, tinh thần cho con người và nó
xuất hiện ở bất cứ nơi đâu có con người sinh sống.
Máy phát điện đồng bộ là thiết bị được sử dụng rộng rãi trong công
nghiệp, phạm vi sử dụng chính là biến đổi cơ năng thành điện năng. Nguồn điện
ba pha để dùng trong nền kinh tế quốc dân và trong đời sống được sản xuất từ
các máy phát điện quay bằng tuabin hơi, tuabin khí hoặc tuabin nước. Ngoài ra
máy phát điện còn được kéo bởi các động cơ sơ cấp khác như động cơ diesel,
động cơ đốt trong cho các máy phát công suất vừa và nhỏ nhằm phục vụ cho các
tải hộ dân sinh, các xí nghiệp nhỏ, các nguồn dự phòng. Máy phát điện giữ một
vai trò then chốt trong các thiết bị cung cấp điện, nó thực hiện ba chức năng:
phát ra điện, chỉnh lưu, hiệu chỉnh điện áp [Tr5 – 1].
Các máy phát điện dự phòng thường được lắp đặt cố định và luôn sẵn
sàng hoạt động để cấp điện cho những tải quan trọng khi nguồn điện lưới bị gián
đoạn. Bệnh viện, các cơ sở thông tin liên lạc, các trạm bơm và rất nhiều các dịch
vụ quan trọng đều được lắp đặt máy phát điện dự phòng. Các máy phát điện đặt
trên rơ moóc có thể được kéo đến những vị trí thiên tai khi nguồn điện lưới bị
gián đoạn. Máy phát điện cũng có thể được vận hành bằng sức người để tạo ra
nguồn điện tức thời trong lĩnh vực thông tin liên lạc.
1.1.2. Lịch sử phát triển của máy phát điện
Trước khi từ tính và điện năng được khám phá, các máy phát điện đã sử
4
dụng nguyên lý tĩnh điện. Máy phát điện Wimshurst đã sử dụng cảm ứng tĩnh
điện. Máy phát Van de Graaff đã sử dụng một trong hai cơ cấu sau:
- Điện tích truyền từ điện cực có điện áp cao.
- Điện tích tạo ra bởi sự ma sát.
Máy phát tĩnh điện được sử dụng trong các thí nghiệm khoa học yêu cầu
điện áp cao. Vì sự khó khăn trong việc tạo cách điện cho các máy phát tạo điện
áp cao, cho nên máy phát tĩnh điện được chế tạo với công suất thấp và không
bao giờ được sử dụng cho mục đích thương mại điện năng.
Dynamo là máy phát điện đầu tiên có khả năng cung cấp điện năng cho
công nghiệp. Dynamo sử dụng nguyên lý cảm ứng điện từ để biến đổi năng
lượng quay cơ học thành dòng điện xoay chiều. Cấu tạo của dynamo bao gồm
một kết cấu tĩnh mà nó tạo ra từ trường mạnh và một cuộn dây quay. Ở các máy
phát dynamo nhỏ, từ trường được tạo ra bằng các nam châm vĩnh cữu, đối với
các máy lớn, từ trường được tạo ra bằng các nam châm điện. Máy phát dynamo
đầu tiên dựa trên nguyên lý Faraday được chế tạo vào năm 1832 do Hippolyte
Pixii là một nhà chế tạo thiết bị đo lường. Máy này đã sử dụng một nam
châm vĩnh cửu được quay bằng một tay quay. Bằng cách bổ sung một bộ chuyển
mạch, Pixii đã có thể biến đổi dòng điện xoay chiều thành dòng điện một chiều.
Không giống như đĩa Faraday, nhiều vòng dây được nối nối tiếp được sử dụng
trong cuộn dây chuyển động của dynamo. Điều này cho phép điện áp đầu cực
của máy cao hơn so với đĩa Faraday tạo ra, do đó điện năng có thể phân phối ở
mức điện áp thích hợp. Mối quan hệ giữa chuyển động quay cơ học và dòng
điện trong dynamo là quá trình thuận nghịch, nguyên lý về môtơ điện đã được
phát hiện khi người ta thấy rằng một máy dynamo có thể tạo ra cho một máy
dynamo thứ hai quay nếu cấp dòng điện qua nó.
Một máy phát điện - động cơ nổ là tổ hợp một máy phát điện và một động
cơ nổ kéo nó thành một khối thiết bị. Tổ hợp này có khi được gọi là bộ máy phát
điện - động cơ (engine - generator set) hoặc bộ máy phát (gen - set). Trong nhiều
ngữ cảnh khác nhau, người ta có thể quên đi cái động cơ nổ mà chỉ gọi đơn
thuần cả tổ hợp là máy phát điện (generator). Đi kèm với máy phát điện và động
cơ nổ, các bộ máy phát điện - động cơ nổ thường có kèm theo một bồn chứa
5
nhiên liệu, một bộ điều tốc cho động cơ nổ và một bộ điều thế cho máy phát
điện. Nhiều khối máy còn kèm theo bình ắcquy và bộ động cơ điện khởi động.
Những tổ máy dùng làm máy phát dự phòng thường bao gồm cả hệ thống tự
động khởi động và một bộ chuyển mạch đảo nguồn transfer switch để tách tải ra
khỏi nguồn điện dịch vụ và nối vào máy phát. Các bộ máy phát điện - động cơ
nổ cung cấp công suất điện xoay chiều sao cho nó có thể được sử dụng thay thế
nguồn điện lưới thường phải mua từ các trạm phân phối của công ty điện lực.
Các thông số điện áp (volt), tần số (Hz) và công suất (watt) định mức của máy
phát được lựa chọn sao cho phù hợp với tải cần nối vào máy phát. Có cả hai loại
máy một pha và ba pha. Rất ít loại máy ba pha là máy xách tay di động. Thường
máy xách tay người ta chỉ làm máy một pha và hầu hết các máy ba pha là loại
máy lớn dùng trong công nghiệp. Bộ máy phát điện - động cơ nổ thường được
chế tao trong một dải công suất khá rộng. Nó có thể bao gồm từ các máy di động
quay tay có thể cấp điện cỡ vài trăm watt, có thể cấp điện cỡ vài nghìn watt và
loại tĩnh hoặc loại đặt trên rơmoóc có thể cấp điện đến vài triệu watt. Các máy
nhỏ thường dùng nhiên liệu là xăng và các máy lớn hơn sử dụng nhiều nguyên
liệu khác nhau, từ dầu diesel, khí tự nhiên hay khí propane. Các máy phát điện
động cơ nổ thường được sử dụng để cung cấp điện cho các vùng mà nguồn điện
lưới không kéo đến được, và trong những tình huống phải cấp điện ngắn hạn tạm
thời. Các máy phát nhỏ đôi khi có thể dùng để cấp điện cho các dụng cụ tại các
công trường xây dựng. Các máy phát điện loại rơ moóc có thể dùng cấp điện cho
chiếu sáng, và các trò chơi giải trí trong các hội chợ di động [9].
Thông thường, các tuabin nước có tốc độ thấp. Vì thế các máy phát điện
kéo bằng tuabin nước cũng có tốc độ rất thấp. Các máy này thường có nhiều đôi
cực, trục ngắn, đường kính lớn, chế tạo theo kiểu cực lồi. Tùy theo thể loại và
theo tốc độ của tua bin nước, các máy này có thể được đặt đứng hay nằm ngang.
Đối với những máy phát điện nhỏ, có đường kính ngoài nhỏ hơn 1 m, mạch từ
của stator chỉ là một khối hình xuyến làm bằng các lớp lá thép kỹ thuật điện có
sơn cách điện ghép lại. Đối với các máy có đường kính lớn hơn 1 m, thường
phải làm từ nhiều khối dạng vòng cung. Rotor của máy phát điện thường làm
bằng nhiều khối thép rèn ghép lại với nhau thành nhiều cực từ. Trên mỗi cực từ
6
có các cuộn dây kích thích quấn tập trung. Các tuabin hơi và tuabin khí có tốc
độ cao hơn tua bin nước. Các máy phát điện tua bin hơi hoặc tua bin khí thường
được chế tạo với tốc độ cao nhất (3000 vòng/phút đối với máy có tần số 50 Hz,
và 3600 vòng/ phút đối với máy 60 Hz). Hầu hết các máy phát điện tuabin hơi
và máy phát điện tuabin khí là loại trục nằm ngang, chế tạo theo kiểu cực ẩn.
Các máy phát điện tua bin hơi và máy phát điện tua bin khí có thể chế tạo từ một
vài MW đến 700 MW [9].
Máy phát điện có thể có các chế độ vận hành khác nhau như sau:
- Phát điện độc lập, cung cấp điện cho một nhóm tải tập trung.
- Phát điện song song.
- Hòa đồng bộ với các máy khác, cung cấp cho một nhóm tải.
- Hòa đồng bộ với lưới.
- Cung cấp công suất lên lưới điện.
- Phát vô công, làm máy bù đồng bộ.
1.2. PHÂN LOẠI VÀ CẤU TẠO CỦA MÁY PHÁT ĐIỆN ĐỒNG BỘ
1.2.1. Phân loại
- Theo kết cấu cực từ: máy cực ẩn (2p = 2), máy cực lồi (2p
4).
- Dựa theo chức năng: máy phát (tuabin nước, tuabin hơi, diesel), động cơ
(P
200KW), máy bù đồng bộ.
Máy phát điện đồng bộ ba pha là máy có tốc độ quay của rotor bằng tốc
độ của từ trường quay stator. Ở chế độ xác lập máy phát điện đồng bộ có tốc độ
quay rotor không đổi khi tải thay đổi. Với
p
f
nn
.60
1
(vòng / phút) , (1.1)
trong đó: p là số đôi cực, n là tốc độ quay của rotor, n
1
là tốc độ quay của từ
trường, f là tần số stator (Hz) [Tr5, 6 - 1].
1.2.2. Cấu tạo của máy phát điện
a. Với máy phát điện đồng bộ cực ẩn
Máy phát điện cực ẩn có n
db
lớn nên lực ly tâm của rotor khi quay rất lớn.
nên rotor phải bền. Rotor thường làm bằng thép hợp kim rèn thành khối hình trụ.
7
Sau đó phay rãnh đặt dây quấn kích từ. Đường kính rotor thường từ 1,1 ÷ 1,15 m
để giảm quán tính. Để tăng công suất của máy thì tăng chiều dài tối đa của rotor
đến 6,5 m.
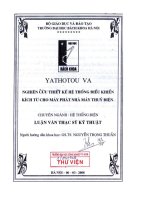
Hình 1.1. Máy phát đồng bộ cực ẩn trục nằm ngang.
1. Bệ máy; 2. Lõi thép stato; 3. Vỏ máy; 4. Giá đỡ stator; 5. Ống dẫn chống
cháy; 6. Dây quấn stato; 7. Vành ép stato; 8. Lá chắn ngoài; 9. Lá chắn trong;
10 . Lá chắn thông gió; 11. Che lá chắn; 12. Cán chổi; 13. Tay giữ chổi; 14.
Chổi; 15. Ổ trục ; 16. Miếng lót; 17. Ống phun dầu;18. Giá đỡ ống phun; 19.
Tấm mỏng; 20. Rotor; 21. Cực; 22. Máy kích thích.
Dây dẫn kích từ ở mặt trong rãnh rotor được chế tạo từ dây đồng trần, tiết
diện chữ nhật quấn theo chiều mỏng thành các bối dây đồng tâm. Các vòng dây
quấn bối dây này được cách điện với nhau bằng một lớp mica mỏng. Dây quấn
kích từ nằm trong rãnh được cố định và ép chặt bằng nối ở ngoài rãnh được đai
chặt bằng các thanh nêm bằng thép không từ tính. Hai đầu của dây quấn kích từ
đi luồn trong trục và nối với hai vành trượt đặt ở đầu trục thông qua hai chổi
điện nối với dòng kích từ một chiều.
Stator của máy phát điện ba pha cực ẩn bao gồm lõi thép, bên trong có đặt
dây quấn ba pha, ngoài là thân và vỏ máy. Dây quấn được bố trí lệch nhau về vị
trí không gian từng đôi 120
0
.
8
Hình 1.2. Rotor cực từ ẩn máy điện đồng bộ khi chưa quấn dây.
Lõi thép stator được ghép và ép bằng các tấm tôn silic dày 0,5 mm có phủ
sơn cách điện, khoảng 3 ÷ 6 cm lại có một rãnh thông gió ngang trục rộng 10
mm. Các máy có công suất trung bình và lớn, thân máy được chế tạo theo kết
cấu cực ẩn được sử dụng cho các máy phát điện của nhà máy nhiệt điện với ưu
điểm là kết cấu nhỏ gọn, chắc chắn phù hợp với tốc độ cao [Tr5 ÷ 8 – 1].
Hình 1.3. Stator máy điện đồng bộ.
b. Với máy phát điện cực lồi
Máy cực lồi được chế tạo cho các máy phát điện có tốc độ quay thấp, nên
tỷ lệ chiều dài, đường kính rotor thường: l/d = 0,15 ÷ 0,2. Rotor của máy phát
điện cực lồi công suất nhỏ và trung bình có lõi thép được chế tạo bằng thép đúc
và gia công thành khối hình trụ trên mặt có đặt cực từ. Với các máy lớn, lõi thép
được chế tạo từ các tấm thép dày 1 ÷ 6 mm dập hoặc đúc định hình sẵn để ghép
thành các khối lăng trụ. Cực từ đặt trên lõi thép rotor được ghép bằng những lá
thép dày 1 ÷ 1,5mm.
Dây quấn kích từ được chế tạo từ dây đồng trần thiết diện hình chữ nhật
quấn theo chiều mỏng thành từng cuộn dây. Cách điện giữa các vòng dây là các
lớp mica hoặc amiăng. Sau khi gia công, các cuộn dây được lồng vào các thân
9
cực. Dây quấn cản của máy phát điện được đặt ở trên các đầu cực có cấu tạo như
dây quấn kiểu lồng sóc của máy phát điện không đồng bộ, nghĩa là làm bằng các
thanh đồng đặt vào rãnh các đầu cực và hai đầu nối với hai vành ngắn mạch.
Hình 1.4. Máy phát đồng bộ cực lồi trục đứng.
1.Rotor; 2. Ổ trục đỡ; 3. Ổ trục định hướng;
4. Xà đỡ trên; 5. Nền máy; 6. Nối trục.
Stator của máy phát điện cực lồi có cấu tạo tương tự máy phát điện cực
ẩn. Các kết cấu về cơ học và hệ thống làm mát cũng được thiết kế tạo phù hợp
tương thích với từng loại máy phát điện, đáp ứng được môi trường và chế độ
làm việc. Máy phát điện có công suất nhỏ làm mát bằng gió, có các khoang
thông gió làm mát được thiết kế chế tạo nằm giữa vỏ máy và lõi thép stator. Đầu
trục của máy được gắn một cánh quạt gió để khi quay không khí được thổi qua
các khoang thông gió. Vỏ máy cũng được chế tạo với các sống gân hoặc cánh
tản nhiệt nhằm làm tăng diện tích bề mặt trao đổi nhiệt cho máy. Với máy phát
điện công suất lớn người ta chia thành các secmăng để dập ghép lại [Tr8, 9 - 1].
Hệ thống vành trượt và máy phát kích từ đầu cực
Hệ thống kích từ máy phát đồng bộ phải đảm bảo:
- Điều chỉnh dòng kích từ để duy trì điện áp máy phát trong điều kiện làm việc
bình thường bằng cách điều chỉnh điện áp kích từ.
- Cưỡng bức kích thích để giữ đồng bộ máy phát với lưới khi điện áp lưới hạ
10
thấp do ngắn mạch ở xa nên phải có khả năng tăng gấp hai lần I
kt
trong 0,5s.
- Giảm nhanh dòng I
kt
về bằng không khi sự cố ngắn mạch nội bộ dây quấn stato
mà điện áp trên điện trở triệt từ R
T
mắc song song với máy phát kích từ không
vượt quá 5 lần U
ktđm
để bảo vệ dây quấn kích từ.
Có ba loại hệ kích từ máy phát đồng bộ sau đây:
- Hệ kích từ dùng máy kích từ một chiều.
- Hệ thống kích từ dùng máy kích từ xoay chiều kết hợp với bộ chỉnh lưu.
- Hệ tự kích từ (kích từ tĩnh).
Các hệ thống kích từ điển hình sẽ được xét đến cụ thể ở các chương sau.
c. Nguyên lý hoạt động
Xét cho máy phát điện đồng bộ ba pha loại công suất lớn có phần cảm là
rotor, phần ứng là stator. Đưa dòng điện kích từ (dòng điện một chiều) vào dây
quấn kích từ thì rotor hình thành một nam châm điện tạo nên từ trường rotor.
Đồng thời quay rotor máy phát điện bằng động cơ sơ cấp (tuabin hơi, diesel )
gắn đồng trục. Khi khép mạch cuộn dây ba pha qua tải đối xứng Z
A
= Z
B
= Z
C
trong cuộn dây ba pha có dòng I
A
, I
B
, I
C
lệch pha nhau về thời gian 120
0
điện,
còn F
δ
là từ trường quay với vận tốc ω
R
= ω
điện
. Từ trường của rotor sẽ quét lên
dây quấn phần ứng stator và cảm ứng sức điện động (sđđ) xoay chiều hình sin ở
ba pha lệch nhau 120
0
điện, có trị số hiệu dụng là:
E
o
= 4,44.K
dq
.f.W.Φ
đm
, (1.2)
trong đó: K
dq
- hệ số dây quấn, W - số vòng dây của một cuộn dây pha, Φ
đm
- từ
thông cực đại dưới một cực của cực từ rotor.
Nếu rotor có p đôi cực, khi rôto quay được một vòng, sđđ phần ứng sẽ
biến thiên p chu kỳ. Do đó nếu tốc độ quay của rotor là n (vòng/s), tần số f của
sđđ sẽ là: f = p.n. Khi dây quấn stato nối với tải, trong các sẽ có dòng điện ba
pha. Giống như ở máy phát điện không đồng bộ, dòng điện ba pha trong ba dây
quấn sẽ tạo nên từ trường quay, với tốc độ là n
1
= 60f/p bằng tốc độ rôto. Do đó
kiểu máy điện này là máy điện đồng bộ. Khi máy phát điện làm việc, từ trường
cực từ
0
sinh ra suất điện động E
0
ở dây quấn stato và khi có tải sẽ có dòng
điện I, điện áp U trên tải.
11
1.3. CÁC ĐẶC TÍNH CỦA MÁY PHÁT ĐIỆN ĐỒNG BỘ
Chế độ làm việc của máy phát điện đồng bộ ở tải đối xứng được thể hiện
rõ ràng của các đại lượng như điện áp U, dòng điện tải I trong dây quấn phần
ứng, dòng điện kích từ i
kt
, hệ số công suất cosφ, tần số f hoặc tốc độ quay n. Trừ
tần số luôn giữ f = f
đm
và cosφ = const do tải bên ngoài quyết định, từ các đại
lượng U, I, i
kt
có thể thành lập được các đặc tính sau đây của máy phát điện
đồng bộ: đặc tính không tải, đặc tính ngắn mạch, đặc tính ngoài, đặc tính điều
chỉnh, đặc tính tải. Từ các đặc tính trên có thể suy ra các tính chất quan trọng
của máy như tỉ số ngắn mạch k, độ thay đổi điện áp ∆U và các tham số x
d
, x
q
,
x
σư
[Tr38 ÷ 44 – 1].
Hình 1.5. Sơ đồ thí nghiệm lấy các đặc tính của máy phát điện đồng bộ.
1.3.1. Đặc tính không tải
Đặc tính không tải là quan hệ E
0
= U
0
= f(i
kt
) khi I = 0 và f = f
đm
.
Hình 1.6. Đặc tính không tải của máy phát đồng bộ.
Đặc tính không tải là quan hệ giữa sức điện động cảm ứng E ở cuộn dây
stato với dòng điện kích từ khi dòng điện tải bằng không. Do có hiện tượng từ
trễ nên đặc tính không tải của máy phát khi i
kt
tăng và giảm không trùng nhau.
Điểm cắt của đặc tính với trục tung (i
kt
= 0) là đại lượng suất điện động dư của
máy phát [Tr27 - 2].
12
1.3.2. Đặc tính ngắn mạch và tỷ số ngắn mạch K
Đặc tính ngắn mạch là quan hệ I
n
= f(i
kt
) khi U = 0, f = f
đm
và phần ứng
được nối ngắn mạch.
Hình 1.7. Mạch điện thay thế dây quấn phần ứng
của máy phát đồng bộ lúc ngắn mạch và đồ thị vector.
Bỏ qua điện trở của dây quấn phần ứng thì mạch điện phần ứng là thuần
cảm. Lúc ngắn mạch phản ứng phần ứng là khử từ. Mạch từ của máy không bão
hòa vì từ thông khe hở không khí Φ
σ
cần thiết để sinh ra E
δ
= E
0
– I.X
ud
= I.X
σư
rất nhỏ. Khi làm thí nghiệm ngắn mạch thì dòng kích từ thường nhỏ nên mạch từ
không bão hòa, do đó quan hệ I = f(i
kt
) là thường là tuyến tính. Sự phi tuyến chỉ
xuất hiện khi dòng ngắn mạch vượt giá trị định mức nhiều
Trên hình 1.8, biểu diễn đặc tính ngắn mạch cho ba trường hợp: ngắn
mạch ba pha (3), hai pha (2) và một pha (1). Vì phản ứng phần ứng của ngắn
mạch ba pha lớn nên nằm dưới cùng, sau đó là ngắn mạch hai pha và nằm trên
cùng là ngắn mạch một pha [Tr28, 29 - 2].
Tỷ số ngắn mạch K là tỷ số giữa dòng điện ngắn mạch, I
no
ứng với dòng
điện kích thích sinh ra suất điện động E
0
= U
đm
khi không tải với dòng điện định
mức I
đm
nghĩa là [Tr 40 – 1]:
đm
no
I
I
K
. (1.4)
Theo định nghĩa đó từ hình, ta có :
d
đm
no
X
U
I
, (1.5)
trong đó: x
d
trị số của điện kháng đồng bộ dọc trục cùng với E
0
= U
đm
. Thay trị
số I
no
theo (1.5) vào (1.4) ta có:
*
1
.
dđmd
đm
XIX
U
K
(1.6)
13
Thường
*
d
X
>1
do đó K <1 và dòng điện ngắn mạch xác lập I
n
< I
đm
. Vì
vậy dòng điện ngắn mạch xác lập của máy phát điện đồng bộ không lớn là do tác
dụng khử từ rất mạnh của phần ứng. Từ hình dựa vào tam giác đồng dạng biểu
diễn tỉ số ngắn mạch K như sau:
tn
to
đm
no
i
i
I
I
K
, (1.7)
trong đó: i
to
là dòng điện kích thích khi không tải lúc U
0
= U
đm
; i
tn
là dòng kích
thích lúc ngắn mạch khi I
no
= I
đm
.
Hình 1.8. Đặc tính ngắn mạch.
Hình 1.9. Xác định tỷ số ngắn mạch K.
Máy phát với K lớn có ưu điểm cho độ điện thay đổi điện áp ∆U nhỏ và
theo biểu thức tính công suất tác dụng [Tr32 - 1] sinh ra công suất điện từ lớn
khiến cho máy làm việc ổn định khi tải dao động:
d
d
x
UE
I
cos.
0
,
q
q
x
U
I
sin.
(1.8)
14
1.3.3. Đặc tính ngoài
Đặc tính ngoài là quan hệ U = f(I) khi i
kt
= const, cosφ = const, f= f
đm
.
Đặc tính ngoài phụ thuộc vào tính chất của tải, khi tải có tính cảm thì I
tăng, phản ứng khử từ của phần ứng tăng, điện áp giảm theo đường biểu diễn đi
xuống. Ngược lại tải có tính dung khi I tăng, phản ứng phần ứng là trợ từ, điện
áp tăng và đường biểu diễn đi lên. Máy phát tuabin hơi thông thường ∆U
đm
% =
25 ÷ 35 %. Độ thay đổi điện áp
100.%
0
đm
đm
đm
U
UE
U
(1.9)
Hình 1.10. Đặc tính ngoài của máy phát điện.
1.3.4. Đặc tính điều chỉnh
Hình 1.11. Đặc tính điều chỉnh của máy phát điện đồng bộ.
Đặc tính điều chỉnh là quan hệ i
kt
=f(I) khi U = const, cos φ = const, f = f
đm
.
Nó cho biết hướng điều chỉnh dòng i của máy phát song song bộ để giữ điện áp
U = const. Ta thấy với tải cảm khi I tăng, tác dụng khử tử của phản ứng phần
15
ứng tăng làm cho U bị giảm. Để giữ cho U không đổi phải tăng dòng điện từ hóa
i
kt
, ngược lại ở tải điện dung khi I tăng, muốn giữ U không đổi phải giảm i
kt
thông thường cosφ
đm
= 0,8 (thuần cảm) nên từ không tải (U = U
đm
, I = 0) đến tải
định mức (U = U
đm
, I = I
đm
) phải tăng dòng điện từ hóa i
kt
trong khoảng 1,7 ÷
2,2 lần.
1.3.5. Đặc tính tải
Đặc tính tải là quan hệ U = f(i
kt
) khi I = const, cosφ = const, f = f
đm
với
các trị số khác nhau của I và cosφ sẽ có các đặc tính tải khác nhau, trong đó có ý
nghĩa nhất là đặc tính tải thuần cảm ứng với cosφ = 0 và I = I
đm
.
k
ud
.F
ud
x
du
.I
dm
U, I
i
t
0
E
d
Q
P
A
B
C
A'
A''
M
I=0
O'
B' O''
B''
C'
C''
I=I
dm
1
2
3
I
dm
Hình 1.12. Xác định đặc tính tải của máy phát đồng bộ với tải thuần cảm
từ đặc tính không tải và tam giác điện kháng.
Đặc tính tải thuần cảm có thể suy ra được từ đặc tính không tải và tam
giác điện kháng. Từ đặc tính ngắn mạch (đường 2) để có trị số I
n
= I
đm
dòng điện
kích i
tn
, sức từ động của cực từ cần thiết F
tn
= i
tn
= 0C. Khi máy làm việc ở chế
độ ngắn mạch sức từ động của cực từ F
tn
= 0C gồm hai phần: một phần để khắc
phục phản ứng khử từ của phần ứng, BC = K
ud
.F
ưd
sinh ra E
ưd
phần còn lại OB =
OC – BC sẽ sinh ra xuất hiện suất điện động tản từ F
σs
= I
đm
.x
σư
= AB (A nằm
trên đoạn thẳng của đặc tính không tải - đường 1 vì lúc đó mạch từ không bão
hòa). Tam giác ABC được hình thành như trên được gọi là tam giác điện kháng
các cạnh BC và AB của tam giác tỷ lệ với dòng tải định mức I
đm
. Thực tế do ảnh
hưởng của bão hòa đặc tính tải thuần cảm có dạng đường nét đứt do sự khắc
phục phản ứng khử từ của phần ứng.
16
CHƯƠNG 2. BIẾN ĐỔI TÍN HIỆU VÀ CÁC KHÍ CỤ ĐIỆN CỦA
TRẠM PHÁT ĐIỆN
2.1. KHÁI QUÁT CHUNG VỀ ĐO LƯỜNG VÀ BIẾN ĐỔI TÍN HIỆU
PHỤC VỤ ĐIỀU KHIỂN TRẠM PHÁT ĐIỆN
2.1.1. Khái quát và phân loại
Các chức năng bảo vệ của trạm phát điện đều dựa trên số liệu từ việc đo
lường các thông số của trạm phát. Nếu việc đo lường bị gián đoạn hoặc không
chính xác thì hệ thống trạm phát hoạt động không ổn định, tin cậy và có thể gặp
các sự cố rất nghiêm trọng. Do đó việc đo lường các thông số của trạm phát là
hết sức quan trọng và có ý nghĩa đến các quyết định điều khiển, điều chỉnh của
hệ thống trạm phát. Trong các thông số đó, thông số cơ bản và quan trọng nhất
là: điện áp, dòng điện, tần số, công suất, …
Đo lường là một quá trình đánh giá định lượng đối tượng cần đo để có kết
quả bằng số so với đơn vị. Ta có 3 thao tác chính:
- Biến đổi tín hiệu và tin tức.
- So sánh với đơn vị đo hoặc so sánh với mẫu trong quá trình đo lường.
- Chuyển đơn vị, mã hóa để có kết quả bằng số so với đơn vị.
Có nhiều cách phân loại song có thể chia thiết bị đo lường thành 2 loại
chính là thiết bị đo chuyển đổi thẳng và thiết bị đo kiểu so sánh.
Thiết bị đo chuyển đổi thẳng: Đại lượng cần đo đưa vào thiết bị dưới bất
kỳ dạng nào cũng được biến thành góc quay của kim chỉ thị. Người đo đọc kết
quả nhờ thang chia độ và những quy ước trên mặt thiết bị, loại thiết bị này gọi là
thiết bị đo cơ điện. Ngoài ra lượng ra còn có thể biến đổi thành số, người đo đọc
kết quả rồi nhân với hệ số ghi trên mặt máy hoặc máy tự động làm việc đó.
Thiết bị đo kiểu so sánh: cũng có thể là chỉ thị cơ điện hoặc là chỉ thị số.
Tùy theo cách so sánh và cách lập đại lượng bù (bộ mã hóa số tương tự) ta có
các thiết bị so sánh khác nhau như: thiết bị so sánh kiểu tùy động (đại lượng đo
x và đại lượng bù luôn biến đổi theo nhau); thiết bị so sánh kiểu quét (đại lượng
bù biến thiên theo một quy luật thời gian nhất định và sự cân bằng chỉ xảy ra tại
17
một thời điểm trong chu kỳ).
Ngoài ra cũng căn cứ vào việc lập đại lượng bù người ta chai thành dụng
cụ mã hóa số xung, tần số xung, thời gian xung. Căn cứ vào điều kiện cân bằng
người ta chia thành dụng cụ bù không lệch (zero) và dụng cụ bù có lệch (vi sai).
Căn cứ vào quan hệ giữa lượng ra và lượng vào, người ta chia thành: thiết
bị đo trực tiếp (đại lượng ra biểu thị trực tiếp đại lượng vào), thiết bị đo gián tiếp
(đại lượng ra liên quan tới nhiều đại lượng vào thông qua những biểu thức toán
học xác định), thiết bị đo kiểu hợp bộ (nhiều đại lượng ra liên quan tới nhiều đại
lượng vào thông qua các phương trình tuyến tính).
2.1.2. Chuyển đổi đo lường và tổ hợp thiết bị đo
a. Chuyển đổi đo lường
- Chuyển đổi chuẩn hóa: Có nhiệm vụ biến đổi một tín hiệu điện phi tiêu
chuẩn thành tín hiệu điện tiêu chuẩn (thông thường U = 0 ÷ 10V; I = 4 ÷ 20mA).
Với loại chuyển đổi này chủ yếu là các bộ phân áp, phân dòng, biến điện áp,
biến dòng điện, các mạch khuếch đại…
Chuyển đổi sơ cấp (S: Sensor): Có nhiệm vụ biến một tín hiệu không điện
sang tín hiệu điện, ghi nhận thông tin giá trị cần đo. Có rất nhiều loại chuyển đổi
sơ cấp khác nhau như: chuyển đổi điện trở, điện cảm, điện dung, nhiệt điện,…
b. Tổ hợp thiết bị đo
Với một thiết bị cụ thể (một kênh)
Hình 2.1. Cấu trúc hệ thống đo một kênh.
+ Chuyển đổi đo lường: biến tín hiệu cần đo thành tín hiệu điện.
+ Mạch đo: thu nhận, xử lý, khuếch đại thông tin… bao gồm: nguồn, các mạch
khuếch đại, các bộ biến thiên A/D, D/A, các mạch phụ…
+ Chỉ thị: thông báo kết quả cho người quan sát, thường gồm chỉ thị số và chỉ thị
cơ điện, chỉ thị tự ghi, v.v…
Với hệ thống đo lường nhiều kênh
18
Trường hợp cần đo nhiều đại lượng, mỗi đại lượng đo ở một kênh, như
vậy tín hiệu đo được lấy từ các sensor qua bộ chuyển đổi chuẩn hóa tới mạch
điều chế tín hiệu ở mỗi kênh, sau đó sẽ đưa qua phân kênh (multiplexer) để được
sắp xếp tuần tự truyền đi trên cùng một hệ thống dẫn truyền. Để có sự phân biệt,
các đại lượng đo trước khi đưa vào mạch phân kênh cần phải mã hóa hoặc điều
chế (Modulation – MOD) theo tần số khác nhau cho mỗi tín hiệu đại lượng đo.
Tại nơi nhận tín hiệu lại phải giải mã hoặc giải điều chế để lấy lại từng tín
hiệu đo. Đây chính là hình thức đo lường từ xa cho nhiều đại lượng đo.
2.1.3. Các nguyên lý đo lường dùng cho mục đích bảo vệ
a. Đo lường một đại lượng đầu vào
Đại lượng đầu vào của X rơle thường là những đại lượng tương tự (dòng
điện, điện áp, góc pha giữa dòng và áp …) được lấy từ phía thứ cấp của máy
biến dòng điện và máy biến điện áp.
Trị số hiệu dụng, trị số tuyệt đối hoặc trị số tức thời của đại lượng đầu vào
này được so sánh với ngưỡng tác động X
kđ
của rơle, còn gọi là trị số chỉnh định
của rơle. Nếu đại lượng đầu vào biến thiên vượt quá (đối với loại rơle cực đại)
hoặc thấp hơn (đối với loại rơle cực tiểu) ngưỡng chỉnh định thì rơle sẽ tác động.
Sau khi tác động xong nếu đại lượng đầu vào biến thiên theo chiều ngược lại và
vượt quá trị số X
tv
, rơle sẽ trở về trạng thái ban đầu trước lúc khởi động. X
tv
được gọi là ngưỡng trở về hoặc trị số trở về. Trị số khởi động và trị số trở về liên
hệ với nhau qua hệ số trở về: K
v
= X
tv
/ X
kđ
.
• Đối với các rơle điện cơ K
v
≠ 1 thông thường:
+ K
v
= 0.85 ÷ 0.9 đối với rơle cực đại.
+ K
v
= 1.1 ÷ 1.15 đối với rơle cực tiểu.
• Đối với các rơle tĩnh và rơle số : K
v
≈ 1
Khái niệm rơle cực đại (tác động khi đại lượng đầu vào tăng) và rơle cực
tiểu (tác động khi đại lượng đầu vào giảm) có ảnh hưởng đến cấu trúc của rơle
điện cơ (cuộn dây, lò xo, tiếp điểm). Đối với rơle tĩnh và rơle số chức năng cực
đại hoặc cực tiểu có thể dễ dàng đổi lẫn cho nhau bằng phép nghịch đảo tín hiệu
logic đầu ra của rơle.
19
b. So sánh nhiều đại lượng đầu vào
Rơle có thể tác động trên cơ sở so sánh nhiều đại lượng đầu vào. Nhiều
loại rơle hiện nay như khoảng cách, so lệch, định hướng công suất,… làm việc
với hai đại lượng đầu vào. Trong trường hợp tổng quát, hai đại lượng đầu vào X
1
và X
2
là tổ hợp của dòng điện I và điện áp U của phần tử bảo vệ:
1 1 2
X K U K I
(2.1)
2 3 4
X K U K I
Ở đây các hệ số tỉ lệ K
1
, K
2
, K
3
, K
4
là những hệ số phức. Tùy từng loại
bảo vệ (loại rơle) có thể chọn những trị số thích hợp cho các hệ số này. Chẳng
hạn, đối với rơle so lệch dòng điện, hai đại lượng dùng để so sánh là vectơ dòng
điện ở hai đầu phần tử được bảo vệ I
1
và I
2
, khi ấy người ta chọn K
1
= K
3
= 0 và
K
2
= K
4
= 1. Đối với rơle khoảng cách hai đại lượng dùng để so sánh là điện áp
chỗ đặt bảo vệ và dòng điện chạy qua phần tử được bảo vệ nên ta chọn các đại
lượng K
1
= K
4
= 1, K
2
= K
3
= 0.
Với các rơle theo hai đại lượng đầu vào thường người ta dùng hai nguyên
lý so sánh: so sánh biên độ và so sánh pha.
* So sánh biên độ
Trong các rơle làm việc với hai đại lượng đầu vào, thông thường một đại
lượng nào đó chẳng hạn X
1
tác động theo chiều hướng làm rơle khởi động còn
đại lượng kia X
2
tác động theo chiều hướng ngược lại (hãm, cản trở rơle tác
động) tín hiệu đầu ra Y của rơle sẽ xuất hiện khi:│X
1
│> │X
2
│
Trong đó: │X
1
│ tín hiệu đầu vào khởi động
│X
2
│tín hiệu đầu vào hãm
Nguyên lý so sánh biên độ hai đại lượng điện được sử dụng trong bảo vệ
so lệch và bảo vệ khoảng cách.
* So sánh pha
So sánh pha phản ánh góc lệch pha giữa các đại lượng đầu vào, nếu góc
lệch pha vượt qua (lớn hơn hay nhỏ hơn) trị số pha định trước rơle sẽ tác động.
Các đại lượng tương tự đầu vào X
1
, X
2
qua các bộ biến đổi BĐ1, BĐ2 biến này
thành các xung chữ nhật X
1
’ và X
2
’ với thời gian trùng pha là t
K
. Kiểu so sánh
20
gọi là so sánh thời gian trùng hợp pha.
Nếu thời gian trùng hợp pha t
K
lớn hơn thời gian đặt t
0
của bộ phận thời
gian sẽ xuất hiện tín hiệu đầu ra (Y = 1). Cũng có thể tiến hành so sánh cho cả
nửa chu kỳ âm để tăng mức tác động nhanh của bộ phận so sánh. Để tăng độ
chính xác của bộ so sánh pha, có thể tiến hành lọc và khử thành phần một chiều
cũng như các sóng hài bậc cao trong các đại lượng đầu vào X
1
, X
2
trước khi dựa
vào bộ so sánh. [Tr 99,100 – 4].
2.2. CÁC DỤNG CỤ ĐO CỦA TRẠM PHÁT ĐIỆN
2.2.1. Đo dòng điện và điện áp
Dòng điện cũng như điện áp của các phần tử trong hệ thống điện thường
có trị số lớn không thể đưa trực tiếp vào dụng cụ đo hoặc rơle và các thiết bị tự
động khác, vì vậy các dụng cụ đo và thiết bị này thường được đấu nối qua máy
biến dòng và máy biến điện áp.
Việc đo lường dòng điện và điện áp rất quan trọng trong mục đích bảo vệ
của hệ thống vì vậy yêu cầu về độ chính xác của thiết bị đó là vô cùng qua trọng.
a. Ampemet
Ampemet một chiều
Ampemet một chiều được chế tạo trên cơ cấu chỉ thị từ điện. Dòng điện
cho phép qua cơ cấu đo từ 10
-1
÷ 10
-2
A, điện trở của cơ cấu từ 20Ω ÷ 2000Ω. Vì
vậy khi sử dụng đo dòng lớn hơn dòng cho phép ta phải mắc thêm một điện trở
sun nối song song với cơ cấu chỉ thị. Sơ đồ cấu tạo của Ampemet như hình 2.2:
U
RS
ISI
RCT
ICT
+
-
Hình 2.2. Cấu tạo Ampemet 1 chiều.
Trong đó: R
CT
- điện trở của cơ cấu chỉ thị;
R
S
- điện trở sun; I
S
- dòng điện qua điện trở sun; I
CT
- dòng điện qua
chỉ thị; I - dòng qua ampemet.
21
Điện trở sun được tính theo công thức:
1
CT
S
R
R
n
CT
I
n
I
Khi sử dụng ampemet cần chú ý:
- Không tạo nên điện áp rơi tại các mối nối.
- Không được nối trực tiếp Ampemet với nguồn điện khi chưa có tải do điện trở
sun có trị số nhỏ sẽ tạo nên dòng điện lớn gây hỏng thiết bị.
- Khi sử dụng Ampemet trước hết phải để đổi nối ở vị trí dòng điện lớn nhất
sau đó giảm dần cho đến khi thỏa mãn dòng cần đo.
Ampemet điện từ
Là dụng cụ đo dòng điện dựa trên cơ cấu chỉ thị điện từ. Mỗi cơ cấu điện
từ được chế tạo với số ampe vòng nhất định (ví dụ: IW = 100 ÷ 200A – vòng) do
đó khi mở rộng thang đo chỉ cần thay đổi sao cho IW là hằng số bằng cách chia
cuộn dây thành nhiều đoạn bằng nhau và thay đổi cách ghép nối các đoạn đó
như hình 2.3, Ampemet điện từ có thể đo dòng từ mA ÷ 10A với tần số công
nghiệp 50Hz. Sai số khoảng ±2% ÷ 5%.
a)
b)
c)
I1
I2
I
I
I
Hình 2.3. Phương pháp thay đổi thang đo của ampemet điện từ.
Ampemet điện động
Thường sử dụng đo dòng điện tần số 50 Hz hoặc cao hơn (400 ÷ 2000Hz)
với độ chính xác cao. Tùy theo dòng đo, cuộn dây tĩnh và động được mắc nối
tiếp hoặc song song.
22
A
A
B
R1
R2
L1
L2
A
A
B
Hình 2.4. Cách đấu cuộn dây của ampemet điện động.
b. Vônmet
Vônmet một chiều
Vônmet một chiều được chế tạo gồm cơ cấu chỉ thị từ điện nối tiếp với
một điện trở phụ R
p
như hình 2.5. Khác với ampemet, Vônmet dùng để đo điện
áp rơi trên phụ tải hoặc điện áp giữa hai đầu của một mạch điện, do đó luôn mắc
song song với phụ tải cần đo.
Rp
RCT
ICT
+
-
U
Hình 2.5. Cấu tạo Vônmet một chiều.
Điện trở phụ (R
p
) được tính theo công thức:
( 1)
p CT
R R m
;
CT
U
m
U
(2.2)
Trong đó: R
p
– điện trở phụ; R
CT
- điện trở của cơ cấu chỉ thị;
U - điện áp cần đo; U
CT
- điện áp rơi trên CCCT (U
CT
= I
CT
.R
CT
)
Vônmet xoay chiều
Vônmet từ điện chỉnh lưu: Là dụng cụ phối hợp giữa mạch chỉnh lưu và
cơ cấu chỉ thị từ điện.
Chỉnh lưu có thể thực hiện dưới dạng nửa chu kỳ hoặc cả chu kỳ. Khi
định thiên thuận, diot silic thường có độ sụt áp thuận là 0.7V, diot Gecmani có
độ sụt cỡ 0.3V. Khi định thiên ngược dòng điện ngược rất nhỏ so với dòng
thuận.
23
RS
RCT
U~
RS
U~
RCT
+
-
a)
b)
Hình 2.6. Vônmet chỉnh lưu: a) Nửa chu kỳ; b) Cả chu kỳ.
Đặc điểm của vônmet chỉnh lưu là độ chính xác không cao, thang đo
không đều do đặc tính phi tuyến của diot, các vônmet chỉnh lưu được chế tạo đo
điện áp dạng hình sin với hệ số hình dáng k
hd
= 1,1 do vậy khi đo với các tín
hiệu khác sin sẽ gây nên sai số đo. Dải tần làm việc của dụng cụ 10 ÷ 20 KHz,
ngoài ra ta còn có thể mở rộng thang đo bằng cách thay đổi điện trở sun.
2.2.2. Đo tổng trở
Nguyên lý đo tổng trở được dùng để phát hiện sự cố trên hệ thống tải điện
hoặc máy phát điện bị mất đồng bộ hay thiếu (mất) kích thích.
Đối với hệ thống truyền tải, tổng trở đo được tại chỗ đặt bảo vệ trong chế
độ làm việc bình thường (bằng thương số của điện áp chỗ đặt bảo vệ với dòng
điện phụ tải) cao hơn nhiều so với tổng trở đo được trong chế độ sự cố. Ngoài
ra, trong nhiều trường hợp tổng trở của mạch vòng sự cố thường tỉ lệ với khoảng
cách từ chỗ đặt bảo vệ tởi chỗ ngắn mạch.
Trong chế độ làm việc bình thường, tổng trở đo được tại chỗ đặt bảo vệ
phụ thuộc vào trị số và góc pha của dòng điện phụ tải. Trên mặt phẳng phức số ở
chế độ dòng tải cực đại I
Amax
khi cosφ của phụ tải thay đổi, mút vectơ tổng trở
phụ tải cực tiểu Z
Amin
sẽ vẽ nên cung tròn có tâm ở gốc tọa độ của mặt phẳng
tổng trở phức.
Đối với bảo vệ khoảng cách làm việc không có thời gian, để tránh tác
động nhầm khi có ngắn mạch ở đầu phần tử tiếp theo, tổng trở khởi động của bộ
phận khoảng cách phải chọn bé hơn tổng trở của đường dây: Z
kđ
= K .Z
D
.
Hệ số K thường được chọn trong khoảng (0.8 ÷ 0.85) có xét đến sai số
24
của máy biến dòng điện, máy biến điện áp và một số ảnh hưởng gây sai số khác.
Những rơle tổng trở đã được chế tạo và sử dụng trong hệ thống điện có đặc
tuyến khởi động rất đa dạng nhằm đáp ứng tốt hơn điều kiện vận hành của hệ
thống.
Ngày nay, nguyên lý đo tổng trở thường được sử dụng kết hợp với các
nguyên lý khác như dòng điện, quá điện áp, sụt áp để thực hiện những bảo vệ đa
chức năng hiện đại .
Nguyên lý đo tổng trở có thể được sử dụng để bảo vệ lưới điện phức tạp
có nhiều nguồn với hình dạng bất kì. Tuy nhiên một số yếu tố có thể ảnh hưởng
đến số đo của bộ phận khoảng cách như sai số của máy biến điện áp, máy biến
dòng điện, điện trở quá độ tại một chỗ ngắn mạch như trên đã nói, hệ số phân bố
dòng điện trong nhánh bị sự cố với dòng điện qua chỗ đặt bảo vệ và đặc biệt là
quá trình dao động điện.
a. Ôm met
Ôm met là dụng cụ đo điện trở với nguồn cung cấp là pin và các điện trở
chuẩn. Xuất phát từ định luật Ôm
U
R
I
, nếu ta giữ cho điện áp U không đổi
thì dòng điện I qua mạch đo sẽ thay đổi khi điện trở thay đổi. Dựa trên nguyên
lý đó ta chế tạo các ôm met đo điện trở.
RCT
R1
Rx
R2
U
A
B
Hình 2.7. Sơ đồ ôm met thông thường.
Trong đó: R
1
– điện trở hạn chế dòng; R
2
– điện trở chỉnh zero; U – nguồn cung
cấp; R
CT
– điện trở của chỉ thị (mili Ampemet từ điện); R
x
– điện trở đo.
Từ sơ đồ hình 2.7 ta có:
R
x
= 0 thì R
tđ
= R
1
+ R
2
// R
CT
=
2
1
2
.
CT
CT
RR
R
RR
; (2.3)
R
tđ
– điện trở của toàn mạch đo.
25
axm
td
U
II
R
Khi R
x
= 0; I = I
min
=0. Ta có thể mở rộng với nhiều thang đo bằng cách
thay đổi điện trở sun sao cho phù hợp. Trong thực tế người ta thường chế tạo
dụng cụ kết hợp đo dòng điện, điện áp (xoay chiều, một chiều) và đo điện trở.
Dụng cụ như vậy gọi là vạn năng kế.
b. Mêgôm met
Hình 2.8. Mêgôm met từ điện.
Mêgôm met là dụng cụ xách tay để kiểm tra điện trở cách điện của cáp
điện, các động cơ, máy phát và biến áp điện lực.
Dụng cụ gồm có nguồn cao áp cung cấp từ máy phát điện quay tay, điện
áp từ 500 ÷ 1000V. Chỉ thị là một lôgôm mét từ điện hình 2.8 gồm hai khung
dây, một khung tạo mômen quay và một khung tạo mômen cản. Góc quay α của
cơ cấu đo tỷ lệ với tỷ số của hai dòng điện I
1
và I
2
qua cuộn dây W
1
, W
2
, điện trở
R
2
, R
x
và R
3
như hình 2.8.
Ta có:
0
1
11
U
I
Rr
;
0
2
1 2 3x
U
I
R R r R
(2.4)
r
1
và r
2
– điện trở của khung. Dưới tác động của lực điện từ giữa từ trường
và các dòng điện qua khung tạo ra mômen quay M
1
và M
2
.
Tại thời điểm cân bằng M
1
= M
2
ta có:
2 3 2
1
2 2 1
x
R R r R
I
FF
I R r
Do R
1
, R
2
, R
3
, r
1
và r
2
là hằng số nên góc quay α tỷ lệ với R
x
và không phụ thuộc
vào điện áp nguồn cung cấp.