Điều khiển số (Digital Control Systems) doc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (19.36 MB, 110 trang )
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
1
Điềukhiểnsố
(Digital Control Systems)
PhầnA:
Môn họctruyền đạtcáckiếnthứcphụcvụ phân
tích, thiếtkế các hệ thống điềukhiểntựđộng sử
dụng vi xử lý (μP, μC, DSP).
PhầnA baogồmcácnội dung thuộcchương
trìnhdànhchoĐạihọc.
(Version 5, 8/2009)
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
2
Điềukhiểnsố
Chương 1: Mô hình tín hiệuvàhệ thống
1. Cấutrúccơ sở củahệ thống ĐK số
2. Mô hình tín hiệutrênmiền ảnh z
3. Mô hình hệ thống trên miền ảnh z
Chương 2: Điềukhiểncóphảnhồi đầura
1. Xét ổn định củahệ thống số
2. Thiếtkế trên miềnthờigianxấpxỉ liên tục
3. Thiếtkế trên miềnthời gian gián đoạn
4. Mộts
ố dạng mở rộng
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
3
Điềukhiểnsố
Chương 3: Điềukhiểncóphảnhồitrạng thái
1. Ôn lạicáckiếnthứccơ sở
2. Mô hình trạng thái gián đoạn
3. Tính ĐK được, QS đượcvàcácdạng chuẩn
4. Cấutrúccơ bảncủahệ thống ĐK số trên không
gian trạng thái
5. Mộtsố dạng mở rộng
Chương 4: Thực hiện kỹ thuậthệ thống ĐK số
1. Ảnh hưởng củasố hóa (l
ượng tử hóa) biên độ
2. Thiếtkế hệ thống bằng máy tính (MATLAB)
3. Thiếtkế hệ thống vi điềukhiển
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
4
Điềukhiểnsố
Tài liệuthamkhảo:
[1] Isermann R.: Digitale Regelsysteme. Bd. I und II, Springer-Verlag, 2.
Auflage, 1987-1988
[2] Franklin G.F., Powell J.D., Workman M.L.: Digital Control of Dynamic
Systems. Addison Wesley, 2
nd
1994
[3] Quang Ng.Ph.: MATLAB & Simulink dành cho kỹ sưđiềukhiểntựđộng.
Nhà xuấtbản KH&KT, 2004
[4] Quang Ng.Ph., Dittrich A J.: Vector Control of Three-Phase AC
Machines. Springer, Berlin – Heidelberg, 2008
Chú ý: Giáo trình này sử dụng để dậycáclớp đạihọcvớithời
lượng 45 tiết, bao gồm lý thuyếtvàvídụ. Vớicáclớp 60
tiết, sẽ dậygiống như lớp 45 tiếtnhưng có thêm bài tậplớn
12-15 tiết.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
5
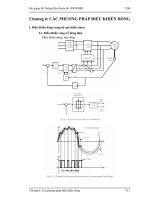
1. Mô hình tín hiệuvàhệ thống
1.1 Cấutrúccơ sở củahệ thống ĐK số
11 0
011
kkk
kk k
pu pu pu
qe qe qe
μμ
νν
−−
−−
++ + =
+++
()
(
)
(
)
1
1
01
ÐC
1
1
01
Qz
qqz qz
Gz
ppz pz
P
z
ν
ν
μ
μ
−
−−
−−
−
+++
==
+++
Khâu Điềuchỉnh:
1. Pt. Sai phân
2. Hàm truyền đạttrên
miền ảnh z
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
6
1. Mô hình tín hiệuvàhệ thống
1.1 Cấutrúccơ sở củahệ thống ĐK số
•Khâu ĐC: sử dụng vi xử lý (microprocessor: μP),
vi điềukhiển (microcontroller: μC) hoặc vi xử lý
tín hiệu (digital signal processor: DSP)
• Khâu DAC: có thể không tồntạimột cách tường
minh, mà ẩndướidạng thiếtbị có chứcnăng DA.
Ví dụ: khâu điềuchế vector điệnáp(khi điều
khiển digital động cơ ba pha)
•KhâuADC: thường sử dụng khi đo đạc giá trị
thựccủa
đạilượng ra (ví dụ: đo dòng). Đôi khi tồn
tạidướidạng khác như: đotốc độ quay bằng IE
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
7
1. Mô hình tín hiệuvàhệ thống
1.1 Cấutrúccơ sở củahệ thống ĐK số
Khâu ADC và quá
trình trích mẫu đo
() () () ()
[
]
[
]
012
0, 1, 2, hay
,,,
k
uk u u u
uuuu
⎡
⎤⎡ ⎤
=
⎣⎦⎣ ⎦
=
…
…
() ( ) ( )
() ( )
*
0
0
k
k
ut ukT t kT
ut t kT
δ
δ
∞
=
∞
=
⎡
⎤
=−
⎣
⎦
=−
∑
∑
Sau khi trích mẫu(lýtưởng)
bằng ADC ta thu được chuỗi
giá trị số:
Để khảosáttínhiệugiánđoạn
bằng công cụ Laplace (hay
phân tích phổ), đồng thờitạo
điềukiệnmôtả hỗnhợpvới các
khâu liên tục, ta nhân chuỗivới
hàm δ(t) và thu được dãy xung
:
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
8
1. Mô hình tín hiệuvàhệ thống
1.1 Cấutrúccơ sở củahệ thống ĐK số
Khâu DAC và quá trình
lưugiữ (nhớ) khi xuất
() ( ) ( )
{}
0
111
k
k
ut u t kT t k T
∞
=
⎡
⎤
=−−−+
⎣
⎦
∑
()
0
1
sT
s
kT
k
k
e
Us ue
s
−
∞
−
=
−
=
∑
()
(
)
(
)
*
1
s
T
H
Us
e
Gs
s
Us
−
−
==
Mô hình tín hiệucódạng bậcthangtrên
miềnthờigian:
Chuyểnsang miền ảnh Laplace:
Từđóthuđượchàmtruyền đạtcủakhâu
giữ chậm:
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
9
1. Mô hình tín hiệuvàhệ thống
1.2 Mô hình tín hiệu trên miền ảnh z
() ( ) ( ) ()
**
00
s
kT
k
kk
ut ukT t kT U s ueδ
∞∞
−
==
⎡
⎤
⎡⎤
=−⇒=
⎢
⎥
⎣⎦
⎣
⎦
∑∑
Chuyểnphươngtrìnhmôtả dãy xung u
*
(t) sang miền ảnh Laplace:
Thay: ta thu được:
s
T
ze=
() ()
*
0
sT
k
k
ez
k
Us Uz uz
∞
−
=
=
⎡
⎤
==
⎢
⎥
⎣
⎦
∑
Ví dụ: Mộttínhiệugiánđoạnvề thời gian cho trướcbởi
00
0
k
k
k
u
ak
⎧
<
⎪
⎪
=
⎨
⎪
≥
⎪
⎩
Ảnh z của tín hiệukể trên:
()
()
00
k
kk
kk
a
Uz az
z
∞∞
−
==
⎛⎞
⎟
⎜
==
⎟
⎜
⎟
⎟
⎜
⎝⎠
∑∑
Chuỗitrênchỉ hộitụ khi , tứclàở vùng phía ngoài
đường tròn có bán kính a → vai trò quan trọng củaTđối
với ổn định củahệ thống.
1az<
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
10
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
Hệ thống ĐK số bao gồm
2 loạikhâucơ bản:
1. Khâu có bảnchấtgián
đoạn: Các tín hiệuvào/ra/
trạng thái đềugiánđoạn
về thờigianvàvề mức.
Khâu mô tả các thiếtbị
ĐK digital.
2. Khâu có bảnchất liên
tục: Mô tả đốitượng điều
khiển. Khi gián đoạn hóa
sẽđưa đếnmôhìnhnhư
hình bên. Việcgiánđoạn
hóa xuấ
tpháttừ mô hình
trạng thái liên tụccủa đối
tượng.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
11
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.1 Mô hình khâu có bảnchấtgiánđoạn
Quy luậttínhtoán(đượcgọilàthuật
toán) xác định đặctínhtruyền đạtcủa
khâu.
a) Mô tả bằng phương trình sai phân
1kk k
uu u
+
Δ= −
1kkk
uuu
−
Δ=−
2
1
21
2
kk k
kkk
uu u
uuu
+
++
Δ=Δ −Δ
=− +
()
11
1
0
1
nn n
kk k
n
n
kn
uu u
n
u
ν
ν
ν
−−
+
+−
=
Δ=Δ −Δ
⎡
⎤
⎛⎞
⎟
⎜
⎢
⎥
⎟
=−
⎜
⎟
⎢
⎥
⎜
⎟
⎜
⎟
⎝⎠
⎢
⎥
⎣
⎦
∑
*Sai phân bậcnhất:
Sai phân tiến:
Sai phân lùi
*Sai phân bậc2:
*Sai phân bậc n:
Mộtphương trình sai phân có ít nhất2 giá
trị u
k+n
và u
k
đượcgọilàphương trình
sai phân bậcn.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
12
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.1 Mô hình khâu có bảnchấtgiánđoạn
a) Mô tả bằng phương trình sai phân
0110 11kn n k nk km m k mk
ax a x ax bu b u bu
+−+ + −+
++ + = ++ +
011 011kk nkn kk mkm
ax ax ax bu bu bu
−− −−
+++ =+++
*Pt. sai phân bậc n sử dụng sai phân tiến:
*Pt. sai phân bậc n sử dụng sai phân lùi:
Giảipt. saiphânbằng phương pháp tính truy hồi (recursive method)
Giả sử ta xuấtpháttừ pt. sai phân lùi với a
0
=1
011 1122kkk mkmk k nkn
xbubu bu ax ax ax
−−−−−
=+ ++ − − −−
Quá trình tính x
k
đượcbắt đầutừ k=0, lầnlượt nâng thêm 1:
000
1011010
0
1
kxbu
kxbubuax
=⇒ =
=⇒ = + −
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
13
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.1 Mô hình khâu có bảnchấtgiánđoạn
a) Mô tả bằng phương trình sai phân Giảipt. saiphântrên miền ảnh z
{}{ }
011 0 11kn n k nk km m k mk
ax a x ax bu b u bu
+−+ + −+
Ζ+++=Ζ++ +
* Bước1: Chuyển đồng thời2 vế củapt. saiphânsang miền ảnh z:
* Bước2: Giả thiết các giá trị ban đầu x
0
, x
1
,…, u
0
, u
1
,… bằng 0, ta có:
() ()
1
01
1
01
mm
m
nn
n
bz bz b
X
zUz
az az a
−
−
+++
=
+++
* Bước3: Ápdụng biến đổingược để tìm x
k
Chú ý: Có thể giải pt. sai phân trên miền ảnh z, xuất phát từ pt. sai phân tiến
hoặc lùi, kếtquả thu đượcbaogiờ cũng là duy nhất.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
14
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.1 Mô hình khâu có bảnchấtgiánđoạn
b) Mô tả bằng hàm truyền đạttrênmiền ảnh z
Với:
()
{
}
()
{
}
;
kk
Xz x Uz u=Ζ =Ζ
là ảnh z của chuỗi giá trị (tín hiệu digital) đầura/ đầuvào, tasẽ có
hàm truyền đạtsau:
()
(
)
(
)
1
01
1
01
;
m
m
n
n
Xz
bbz bz
Gz m n
Uz
aaz az
−−
−−
+++
== =
+++
Tương tự hệ liên tục, hàm truyền đạt G(z) có thểđượccoilàảnh z
củahàmtrọng lượng gián đoạn[g
k
] (chuỗitrọng lượng). Vậy:
()
{}
1
0
k
kkkii
i
gGzxgu
−
−
=
=Ζ ⇒ =
∑
()
(
)
()
()
[]
(
)
4
1
144
11
4
1
11
11
4114
1111
,,,,0,0,
4444
kk
k
k
Xz
z
Gz
Uz
z
zz
gz
zz
g
−
−
−−−
−
==
−
⎧⎫
⎪⎪
⎪⎪
⇒=Ζ − = −
⎨⎬
⎪⎪
−−
⎪⎪
⎩⎭
⇒=
Ví dụ:Khiu
k
=1
k
ta có:
12 10
00
110
2210
33210
4 43210
0, 25
0,5
0,75
1
1
kkk k
xgg g gg
xg
xgg
xggg
xgggg
xggggg
−−
=+ + +++
==
=+=
=++=
=+++=
=++++=
…
Chú ý: Trên cơ sở các
phương trình vector sai
phân, có thể mô tả khâu
truyền đạtgiánđoạnnhiều
chiềutuyến tính bởi:
() () ()
zzz=XGU
Trong đó G(z) là ma trận
truyền đạtgiánđoạn.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
15
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.1 Mô hình khâu có bảnchấtgiánđoạn
c) Mô tả bằng mô hình trạng thái gián đoạn
**
+1
**
+
+
kkk
kkk
qAqBu
xCqDu
⎧
⎪
=
⎪
⎪
⎨
⎪
=
⎪
⎪
⎩
**
+1
**
+
+
kkk
kkk
u
xdu
qAqb
cq
⎧
⎪
=
⎪
⎪
⎨
⎪
=
⎪
⎪
⎩
Hệ MIMO:
Hệ SISO:
•Mô hình thu đượctừ phương trình sai phân, hay hàm truyền đạt(trênmiền ảnh z) mô tả
thuật toán mà khâu thựchiện(thuậttoán ĐC, lọcsố vv…).
•Có thể thựchiệnbiến đổi sang các dạng chuẩntắc(chuẩn ĐK, chuẩn QS) thông dụng
để mô tả hoặc tính toán.
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
16
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.2 Mô hình khâu có bảnchấtliêntụcvàtínhiệuvàodạng bậc thang
a) Đặc điểmcủa quá trình nhớ
(xem trang 7)
()
()
()
*
0
1
H
sT
s
kT
k
k
Gs
Us
e
Us ue
s
−
∞
−
=
−
=
∑
()
(
)
(
)
*
1
s
T
H
Us
e
Gs
s
Us
−
−
==
Dạng bậcthangcủa tín hiệu vào do
quá trình nhớ tạonên. Trênmiền
ảnh Laplace có dạng:
Kếtluận: Khi xét ĐTĐK không bao giờđược phép quên
khâu giữ chậm(đặctrưng cho quá trình nhớ)
b) Mô tả bằng hàm truyền đạt
(
)
(
)
(
)
*
Xs GsU s=
Với X(s) là ảnh Laplace củabiếnra, U
*
(s)
là ảnh Laplace củachuỗixungđầuvào
Gọi ảnh Laplace của đáp ứng bướcnhẩy
đơnvị (củahàmquáđộ h(t))là H(s) ta có:
(
)
(
)
(
)
(
)
(
)
() () ()
1
1
sT sT
sT
H
Gs Hs e Hs e Hs
e
Gs G sGs
s
−−
−
=− =−
−
==
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
17
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.2 Mô hình khâu có bảnchấtliêntụcvàtínhiệuvàodạng bậc thang
b) Mô tả bằng hàm truyền đạttrênmiền ảnh z
(
)
(
)
(
)
Xz GzUz=
Với đượctínhtheomột trong hai cách
mô tảởhình bên
()
Gz
Ví dụ: Đốitượng ĐK là một khâu quán tính
bậcnhất. Theo cách đithuộc nhánh bên trái:
() ()
()
()
()
()
1
11
11
11
11
=⇒= ⇒=−
++
tT
Gs Hs ht e t
sT s sT
1
1
kT T
kT
k
he
−
=−
()
1
1
TT
zz
Hz
z
ze
−
=−
−
−
()
1
1
1
1
1
1
TT
TT
TT
z
Gz
ze
e
ze
−
−
−
−
=−
−
−
=
−
*Chuỗi sau gián đoạn hóa:
*Chuyểnsang ảnh z:
*Hàm truyền đạtcủa
đốitượng trên miền
ảnh z:
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
18
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.2 Mô hình khâu có bảnchấtliêntụcvàtínhiệuvàodạng bậc thang
b) Mô tả bằng hàm truyền đạttrênmiền ảnh z
Lưuý, khihàmtruyền đạtcódạng phân thứchữutỷ
sẽ có khả năng tách thành các phân thứctốigiảnnhư sau:
()
(
)
(
)
()
(
)
(
)
Bs Bs
Gs Hs
A
ssAs
=⇒=
a) H(s) có các cực s
ν
bấtkỳ, khác nhau:
b) H(s) có cực s
ν
lặplại m lần:
1
s
T
z
ss
z
e
ν
ν
⎧⎫
⎪⎪
⎪⎪
Ζ=
⎨⎬
⎪⎪
−
−
⎪⎪
⎩⎭
()
()
1
1
11
1!
m
mmsT
z
m
s
z
e
ss
ν
ν
ν
−
−
⎧⎫
⎪⎪
∂
⎪⎪
⎪⎪
Ζ=
⎨⎬
⎪⎪
−
∂
−
−
⎪⎪
⎪⎪
⎩⎭
Tiếptụcvídụ trang trướcbằng cách đi theo nhánh bên phải:
*Tách H(s) thành các phân thứctốigiản:
()
()
1
11
111
+1 T +1 T
T
Hs
ss s s
==−
()
{}
()
1
1
TT
zz
Hs Hz
z
ze
−
Ζ==−
−
−
*Tìm H(z) nhờ tìm ảnh của các phân thứctốigiản:
*Hàm truyền đạtcủa đốitượng trên miền ảnh z:
()
1
1
1
TT
TT
e
Gz
ze
−
−
−
=
−
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
19
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.2 Mô hình khâu có bảnchấtliêntụcvàtínhiệuvàodạng bậc thang
c) Mô tả bằng mô hình trạng thái gián đoạn
(
)
(
)
(
)
ttt
•
=+qAqBu
()
()
()
()
()
(
)
(
)
(
)
(
)
0
0
0
00 00
0, 1, 2,
τ
ττ
−−
⎡⎤
=+
⎢⎥
⎣⎦
=− +− =
∫
Φ …
t
ttt
t
te t e d
tt t tt t k
AA
qq Bu
q Η u
()
() ()
(
)
(
)
11 1
1
kkkkkkk
TT
kkk
ttttttt
TT
++ +
+
⎛⎞ ⎛⎞
⎟⎟
⎜⎜
⎟⎟
⎜⎜
=− +−
⎟⎟
⎜⎜
⎟⎟
⎜⎜
⎟⎟
⎟⎟
⎜⎜
⎝⎠ ⎝⎠
=+
qqΗ u
qqΗ u
Φ
Φ
() ()
1
TT
−
⎡⎤
=−
⎢⎥
⎣⎦
HA IBΦ
•Cho trước đốitượng MIMO:
•Nghiệmtổng quát với t > t
0
và :
•Với t
0
=t
k
và chọn t=t
k+1
ta có:
•Với:
Ưu điểm: Dễ dàng tìm đượcmôhình
gián đoạncủa các đốitượng MIMO
(
)
=Φ
t
te
A
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
20
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.2 Mô hình khâu có bảnchấtliêntụcvàtínhiệuvàodạng bậc thang
d) Quan hệ giữamôhìnhtrạng thái và mô hình truyền đạt
•Mô hình đầy đủ của đốitượng MIMO có dạng:
(
)
(
)
1+
⎧
⎪
=+
⎪
⎨
⎪
=+
⎪
⎩
Φ
kkk
kkk
TTqqΗ u
xCqDu
vớiphương trình đặc tính:
[]
det 0−=Φz I
•Ma trậntruyền đạt G(z) trên miền ảnh z của đốitượng MIMO:
() ()()
() () ()
()
()
()
1
det
−
⎧
⎪
⎡⎤
=− +
⎪
⎣⎦
⎪
⎪
⎪
=⇒
⎡⎤
⎨
−
⎪
⎣⎦
=+
⎪
⎪
⎡⎤
−
⎪
⎣
⎦⎪
⎩
Φ
Φ
Φ
zzT T
zzz
adj z T
T
zT
GCI HD
xGu
I
CHD
I
() () ()
()
()
()
1
det
−
⎧
⎪
⎡⎤
=−
⎪
⎣⎦
⎪
⎪
⎪
⎡⎤
⎨
−
⎪
⎣⎦
=
⎪
⎪
⎡⎤
−
⎪
⎣
⎦⎪
⎩
Φ
Φ
Φ
zzT T
adj z T
T
zT
GCI H
I
CH
I
Khâu
quán tính
•Hàm truyền đạt G(z) trên miền ảnh z của đốitượng SISO:
()
()
()
() () ()
()
()
()
1
det
−
⎧
⎪
⎡⎤
=− +
⎪
⎣⎦
⎪
⎪
⎪
=⇒
⎡⎤
⎨
−
⎪
⎣⎦
=+
⎪
⎪
⎡⎤
−
⎪
⎣
⎦
⎪
⎩
Φ
Φ
Φ
T
T
Gz z T T d
xz
Gz
adj z T
uz
Td
zT
cI h
I
ch
I
() () ()
()
()
()
1
det
−
⎧
⎪
⎡⎤
=−
⎪
⎣⎦
⎪
⎪
⎪
⎡⎤
⎨
−
⎪
⎣⎦
=
⎪
⎪
⎡⎤
−
⎪
⎣
⎦
⎪
⎩
Φ
Φ
Φ
T
T
Gz z T T
adj z T
T
zT
cI h
I
ch
I
Khâu
quán tính
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
21
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.3 Mô tả hệ trong khoảng giữahaithời điểmtríchmẫu
Đặc điểm không tường minh
củaphépbiến đổi z ngược
Giữa2 thời điểm
trích mẫu:
()
;0 1tk Tεε=+ ≤≤
Chọnsố lượng ε đủ lớn,
ta có thể mô tả x(t) bởi:
()
()
k
xk T x
ε
ε
+
⎡
⎤
⎡
⎤
+⇔
⎢
⎥
⎣
⎦
⎣
⎦
Biến đổiz mở rộng
{}
()
()()
0
,
,
0, 1, 2, , 0 1
k
kk
k
x
Xz x z
Gz Uz
k
εε
ε
ε
ε
∞
−
++
=
⎡
⎤
Ζ= =
⎢
⎥
⎣
⎦
=
=≤≤
∑
Hai trường hợp đặcbiệtcóthể dùng để kiểmtra:
(
)
{
}
(
)
()
{}
()
10
0,0
1,1
k
k
Xz Zx Xz
Xz Zx zXz x
ε
ε
+
=⇒ = =
⎡
⎤
=⇒ = = −
⎢
⎥
⎣
⎦
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
22
1. Mô hình tín hiệuvàhệ thống
1.3 Mô hình hệ thống trên miền ảnh z
1.3.4 Mô tả hệ gián đoạncótrễ (tín hiệu vào dạng bậc thang)
Mô hình có trễ T
d
ởđầu vào
(
)
;1,2,;0 1
dd d
Td Tdεε=− = ≤<
(
)
{
}
(
)
,
d
d
dd
kd
Gz g zGz
ε
ε
−
−+
=Ζ =
Hệ vớithờigiantrễ T
d
(Dead-Time): đượcmôtả bởi:
()
0
d
ki
kd i
i
x
gu
ε
∞
−+ −
=
⎡
⎤
=
⎢
⎥
⎣
⎦
∑
Áp dụng các kiếnthứcvề biến đổi z mở rộng và nguyên lý tịnh tiếncủa ảnh z, ta thu đượchàm
truyền đạt G
d
(z) sau:
Khi T
d
là số nguyên
lầncủa T, chỉ cầnbổ
xung z
-d
. Khi T
d
không
là số nguyên lầncủa
T, sử dụng
ε
d
(thay vì
ε
) để tìm ảnh z mở
rộng. Trong cả 2
trường hợp, sẽ xuất
hiện điểmcựclặplại
d lầntạigốctọa độ.
() ()
1kkkd
T
kk
TT
+−
=+
=
qqhu
xcq
Φ
() ()
1kkk
T
kd k
TT
+
+
=+
=
qqhu
xcq
Φ
Khi T
d
là số nguyên lầncủa T:1) T
d
xuấthiện ởđầuvào:
2) T
d
xuấthiện ởđầura:
3) Trong cả hai trường hợp: Bậccủa Φ nâng lên thành
(n+d)×(n+d)
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
23
2. ĐK có hồitiếp đạilượng ra
2.1 Xét ổn định củahệ thống ĐK số
2.1.1 Ổn định truyền đạt
()
()
()
adj
det
T
z
Gz d
z
−
=+
−
I
ch
I
Φ
Φ
()
()
()
adj
det
z
z
z
−
=+
−
I
GC HD
I
Φ
Φ
()
()
()
()()()
1
12
det
n
i
i
ni
Bz Bz
cz
zzzzzzzzz
=
==
−−−− −
∑
I Φ
•Hệ SISO:
•Hệ MIMO:
Về cơ bản, khi hệ có quán tính (d = 0, D = 0), hai
cấutrúcđềucódạng phân thứcnhư sau:
11 2 2
;0,1,2,
kk k
knn
gczcz czk=+++ =…
Biến đổi z ngược
Theo định nghĩavềổn định truyền đạt, dãy g
k
chỉ có giá trị hạnchế khi |z
i
|<1.
Tứclàchỉ khi tấtcả các điểmcực (nghiệmcủaphương trình đặc tính) nằmbên
trong đường tròn đơnvị củamặtphẳng z.
2.1.2 Tiêu chuẩn đạisố
Sử dụng phép biến đổi wchuyểnmiền ổn định bên trong
đường tròn đơnvị củamặtphẳng z sang bên trái mặt
phẳng phứcmới, gọilàmặtphẳng w, cho phép sử dụng
các tiêu chuẩn đạisố ROUTH và HURWITZ quen biết.
Ví dụ:
1
1-
w
z
w
+
=
1
1-
w
z
w
+
=−
hoặc:
a) Sử dụng phép biến đổi tương đương
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
24
2. ĐK có phảnhồi đầura
2.1 Xét ổn định củahệ thống ĐK số
2.1.2 Tiêu chuẩn đạisố
1. Ứng vớimỗi điểmbấtkỳ thuộcmiền ảnh z:
zu
j
v=+
ta thu đượcmột điểmmớitrênmiền ảnh w:
22
22 22
112
1
12 12
zuv v
wj
z
uv u uv u
++−
== −
−
++− ++−
2. Đường tròn đơnvị , biên giới ổn
định trên miền ảnh z trở thành đường thẳng:
22
1uv+=
1
v
wj
u
=−
−
3. Trước khi sử dụng tiêu chuẩn ROUTH hay HURWITZ ta phảichuyển đathức đặc tính:
(
)
'' '2 '
01 2
n
n
Nz a az az az=+ + ++
sang miền w:
()
2
'' ' 2
01 2 01 2
11
0
11
⎛⎞
++
⎟
⎜
=+ + +=+ + +=
⎟
⎜
⎟
⎟
⎜
⎝⎠
−−
ww
Nw a a a h hw hw
ww
Nghiệmcủa đathức
đặctínhN(z) chỉ nằm
trong đường tròn
đơnvị khi và chỉ khi
tấtcả nghiệmcủa
N(w) đềucóphần
thựcâm.
a) Sử dụng phép biến đổi tương đương (tiếp):
18 August 2009 Assoc. Prof. Hon Prof. Dr Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
25
2. ĐK có phảnhồi đầura
2.1 Xét ổn định củahệ thống ĐK số
() ()
()
()
1
1
01 1
02
2
0
det ; det ; 1, 2, ,
00
;
00
00
kkkkkk
nn
nk
k
kn
nk
kk
n
CDkn
aaa
aa a
aa a a
a
a
−
−−
−
−
−−
=+ =−=
⎡
⎤
⎡⎤
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
==
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎣
⎦
⎣
⎦
A
BAB
AB
2.1.2 Tiêu chuẩn đạisố
a) Sử dụng phép biến đổi tương đương
(tiếp):
b) Sử dụng tiêu chuẩn Schur-Cohn-Jury: Tương tự tiêu
chuẩn HURWITZ, ta sẽ phải thiết lập các định thức từ
các hệ số của đa thức đặc tính N(z)
1. Tính các định thức C
k
, D
k
:
2. Điều kiện cần và đủ để nghiệm của N(z) nằm trong
đường tròn đơn vị sẽ là và
đồng thời phải thỏa mãn:
(
)
21
01 2 1
−
−
=+ + ++ +
nn
nn
Nz a az az a z az
22
44
66
0; 0
0; 0
0; 0
CD
CD
CD
<<
>>
<<
11
33
55
0; 0
0; 0
0; 0
CD
CD
CD
><
<>
><
k chẵn:
k lẻ:
()
10N >
() ()
110
n
N−−>