Dạy lập trình AVR cơ bản nhất- Chương 4 - Bài 1
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (244.31 KB, 16 trang )
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 56
CHƯƠNG 4: THỰC HÀNH GIAO TIẾP VỚI
CÁC NGOẠI VI CƠ BẢN
BÀI 1: GIAO TIẾP NHẬP XUẤT VỚI
LED ĐƠN VÀ PHÍM ĐƠN
Các bài thực hành trong chương này sử dụng Atmega16
I. Phần cứng.
+Do Atmega16 có khả năng cấp dòng khá cao (khoảng 20mA) nên có
thể mắc trực tiếp led đơn vào chân I/O của các port.
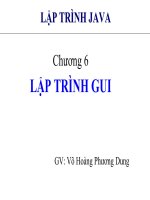
+Phím đơn có thể mắc theo 2 cách, dùng điện trở kéo lên =>mức tác
động thấp hoặc dùng điện trở kéo xuống => mức tác động cao.
Hình 1. Nút nhấn tác động thấp và nút nhấn tác động cao.
Trong chương này chủ yếu sử dụng nút nhấn tác động thấp.
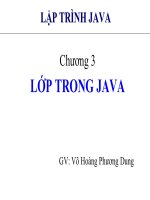
Module giao tiếp phím ấn và led đơn bao gồm 8 phím ấn và 8 led đơn
với 2 cổng kết nối. Module này thích hợp sử dụng với board phát triển đã giới
thiệu ở chương 1.
Sơ đồ của module được giới thiệu ở hình 2.
R1
10k
R2
8k2
SW1
BUTTON
VCC
I/O PIN
VCC
SW2
BUTTON
I/O PIN
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 57
Hình 2. Module giao tiếp phím nhấn và led đơn.
II. Giao tiếp với led đơn.
Trong chương 1 đã giới thiệu, việc xuất dữ liệu của các PORT được điều
khiển bởi thanh ghi PORTx và các bit của thanh ghi này tương ứng với các PIN
của PORTx.
Thực hành:
- Chạy MikroC và tạo 1 dự án mới có tên là BAI1_1_A, cấu chọn tần
số thạch anh là 16Mhz, dùng vi điều khiển Atmega16, chọn tất cả
các thư viện
- Không sử dụng file bai1.c mà tạo file khác có tên là bai1_1_A, sử
dụng file này làm file nguồn.
- Soạn thảo chương trình sau:
Bài 1 _ 1 _A: Tạo và quản lý project
unsigned char i;
void main(){
DDRA=0xFF;// CẤU HÌNH PORTA LÀ PORT XUẤT
while(1){
for(i=1;i<=255;i++){
PORTA=i;
Delay_ms(500);// TRÌ HOÃN 500ms
SW1
BUTTON
VCC
SW2
BUTTON
SW3
BUTTON
SW4
BUTTON
VCC D1
LED
R5
330
D2
LED
R6
330
D3
LED
R7
330
D4
LED
R8
330
D5
LED
R9
330
D6
LED
R10
330
D7
LED
R11
330
D8
LED
R12
330
SW5
BUTTON
SW6
BUTTON
SW7
BUTTON
SW8
BUTTON
R13
10k
12
3
4
5
6
7
8
9
J1
PORT_8_PIN
1
2
3
4
5
6
7
8
9
10
VCC
J2
PORT_8_PIN
1
2
3
4
5
6
7
8
9
10
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 58
}
}
}
- Tiến hành biên dịch và nạp xuống board hoặc mô phỏng bằng proteus.
Hàm trì hoãn bao gồm 2 loại:
Delay_ms(đối số vào); /*trì hoãn với đơn vị mili giây và đối số vào là thời gian
cần thiết */
Delay_us(đối số vào); /*trì hoãn với đơn vị micro giây và đối số vào là thời
gian cần thiết */
Các bạn hãy tìm hiểu thêm về 2 hàm này bằng công cụ help(F1).
- Mở cửa sổ Statistics để xem tài nguyên đã chiếm dụng:
Project>View Statistics.
- Mở cửa sổ watch(shift+F5) để xem giá trị biến i và thanh ghi
PORTA.
Thử thay đổi tần số thạch anh trong Project Setting sau đó biên dịch lại
và mô phỏng bằng proteus. Ta thấy có sự sai lệch về thời gian trì hoãn nhưng
chương trình vẫn chạy, qua đó nói lên vai trò của thạch anh.
Sau đây là 1 số bài ví dụ để các bạn có thể làm quen với các bước thay
đổi file nguồn dự án, soạn thảo biên dịch chương trình.
Ví dụ 1: Viết chương trình chạy 1 led sáng từ phải sang trái và trái sang
phải.
Bài 1 _ 1 _B: Chương trình dịch led 1
char i;
void main(){
DDRA=0xFF;// Cấu hình PORTA là PORT xuất
while(1){// Vòng lặp vô tận
for(i=0;i<=7;i++){ // Vòng lặp 8 lần
PORTA=0x01<<i; /*Dịch trái từ 0 đến 7 bit*/
delay_ms(500);// Trì hoãn 0.5s
}
}
}
Yêu cầu: các bạn cải tiến chương trình để 1 led sáng chạy sang phải đến biên
rồi chạy trở về bên trái đến biên.
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 59
Ví dụ 2: Viết 1 chương trình để 2 led sáng từ 2 biên chạy vào giữa, rồi
chạy trở ra 2 biên.
Bài 1 _ 1 _B: Chương trình dịch led 2
char i;
void main(){
DDRA=0xFF;
while(1){
for(i=0;i<=3;i++){
PORTA=0x01<<i|0x80>>i;
delay_ms(500);
}
for(i=1;i<=2;i++){
PORTA=0x10<<i|0x08>>i;
delay_ms(500);
}
}
}
Từ các ví dụ trên, ta có thể thấy sự tương quan dữ liệu của thanh ghi
PORTA và các chân PORTA. Các led chính là mô hình của các bit có giá trị 0
và 1 được thay đổi liên tục thông qua các toán tử.
Các trường hợp trên, ta đã tìm ra quy luật của sự thay đổi trạng thái của
các led như yêu cầu. Thực tế đôi khi ta chưa tìm ra quy luật vận động của dữ
liệu, trong trường hợp đó ta có thể dùng phương pháp lựa chọn và gán các dữ
liệu cần thiết vào mảng.
Ví dụ 3: Viết lại chương trình của ví dụ 2.
Bài 1 _ 1 _B: Chương trình dịch led 3
char i;
char table[8]={0x81,0x42,0x24,0x18,0x24,0x42};
void main(){
DDRA=0xFF;
while(1){
for(i=0;i<=5;i++){
PORTA=table[i];/*Lấy phần tử i của mảng */
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 60
delay_ms(500);
}
}
}
Bài tập: Viết 1 chương trình điều khiển 8 led sáng chạy dần từ trái sang
phải (tốc độ 250ms/1led), chớp 2 lần mỗi lần cách nhau 1s.
(Xem bài giải trong file BAI1_1_E.c)
Từ các ví dụ trên, nếu thay các led bằng các tầng công suất, ta có thể
ghép nhiều led thành các ký tự, hình vẽ để trang trí, rất thích hợp cho việc
quảng cáo và các hình thức biểu diễn rất phong phú và đa dạng.
III. Giao tiếp phím nhấn đơn.
Phím đơn là 1 ngoại vi cho phép đưa tín hiệu số vào vi điều khiển để xử
lý, vì vậy trước hết ta cần cấu hình PORTx giao tiếp theo hướng nhận dữ liệu.
Dữ liệu nhận vào được lưu trong thanh ghi PINx, và dữ liệu này thay đổi
khi trạng thái các chân nhập xuất thay đổi.
Phím đơn có 1 hạn chế đó là hiện tượng dội cơ khí. Hiện tượng này xảy
ra khi ta ấn phím, phím không lập tức tiếp xúc bền với tiếp điểm mà sẽ dội ra –
dập vào liên tiếp nhiều lần(ta không thể cảm nhận được hiện tượng này). Do
đó, tín hiệu sinh ra do phím nhấn sẽ không phải là xung vuông mà sẽ là 1 chuỗi
xung liên tiếp có độ rộng xung khá bé. Để sử dụng được phím nhấn, ta phải
khắc phục hiện tượng dội cơ khí. Ta sẽ không quan tâm đến các biện pháp
chống dội bằng Smith trigger hay chốt RS mà sẽ nghiên cứu việc chống dội
bằng phần mềm tức là viết chương trình có khả năng chống dội cơ khí.
1. Giao tiếp phím nhấn đơn giản.
Ở phần này chúng ta chưa đề cập đến hiện tượng dội cơ khí mà chỉ xem
xét việc nhận dữ liệu qua thanh ghi PINx.
Thực hành:
- Sử dụng tiếp dự án BAI1, ta tạo file nguồn mới với tên là
BAI1_2_A.c
- Soạn thảo và biên dịch chương trình sau:
Bài 1 _ 2 _A: Đọc PORT đơn giản
// Hàm (chương trình con) khởi tạo PORT giao tiếp
void init(){
DDRA=0xff;// Cấu hình PORTA là port xuất
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 61
DDRC=0x00;// Cấu hình PORTC là port nhập
}
// Chương trình chính
void main(){
init();// Gọi hàm khởi tạo
while(1){ // Vòng lặp đọc phím liên tục
PORTA=PINC; // Gán giá trị đọc về cho PORTA
}
}
- Chương trình trên là chương trình đọc phím đơn giản, nó đọc giá trị
nhận được ở PORTC và xuất ra led để hiển thị trạng thái của PORTC.
- Chạy mô phỏng chương trình và xem kết quả. Ta thấy, thời gian đáp
ứng rất nhanh, trong ứng dụng này ta không cảm nhận được hiện tượng dội
cơ khí.
- Chương trình tiếp theo có yêu cầu là: khi nhấn phím 1( kết nối với
PORTC0) thì giá trị PORTA tăng 1 đơn vị, ấn phím 2 ( kết nối với PORTC1)
thì giá trị phím giảm 1 đơn vị (PORTA hiển thị giá trị nhị phân).
Bài 1 _ 2 _B: Đọc phím, thực hiện công việc
char i;
void init(){
DDRA=0xFF;
DDRC=0x00;
}
void main(){
init();
while(1){
DDRC=0x00;
//Kiểm tra trạng thái chân C0
if(PINC0_bit==0){
i++; // Nếu có ấn thì tăng i 1 đơn vị
delay_ms(100);
}
//Kiểm tra trạng thái chân C0
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 62
if(PINC1_bit==0){
i ;// Nếu có ấn thì tăng i 1 đơn vị
delay_ms(100);
}
PORTA=i;
}
}
Với chương trình trên, ta thực hiện các thử nghiệm sau:
+Bỏ 2 hàm delay sau đó biên dịch và mô phỏng. Ta thấy, Proteus sẽ tự
động kéo giản thời gian để mô phỏng hiện tượng dội phím. Ta ấn phím 1 lần
rồi nhả ra nhưng giá trị PORTA không ngừng tăng(hoặc giảm) cho đến 1
khoảng thời gian nhất định.
+Thay đổi giá trị thời gian trì hoãn của 2 hàm delay, ta thấy thời gian trì
hoãn có tác dụng nhất định, nó bỏ qua giai đoạn xuất hiện các chuỗi xung
không mong muốn.
Chương trình trên vẫn chưa sử dụng được vì phím không nhạy (cần thời
gian trì hoãn nhiều) và nếu ấn giữ thì phím sẽ thực hiện công việc liên tục.
Ta sẽ nghiên cứu thêm về phương pháp chống dội phím ở phần sau.
Để truy xuất từng bit (từng chân) của các PORT ta xử lý các biến sau:
+Nhận dữ liệu: PINxy_bit với x là tên PORT, y là tên chân .
+Xuất dữ liệu : PORTxy_bit với x là tên PORT, y là tên chân .
Ví dụ : PORTA1_bit=PINC1_bit ;
2. Chống dội phím với thư viện có sẵn của MikroC.
MikroC cung cấp cho chúng ta 1 thư viện phím (nút nhấn - button). Để
sử dụng thư viện này, ta phải khai báo bằng cách dùng công cụ Library
manager(View>Library Manager).
Sau đây là bảng tóm tắt về hàm button trong thư viện này:
Prototype
unsigned short Button(unsigned short *port, unsigned short pin, unsigned
short time, unsigned short active_state);
Kết quả trả về
+255 nếu chân được tác động
+0 nếu xảy ra trường hợp khác.
Mô tả
-port: tên thanh ghi PINx của port mà phím đang kết nối vào
-pin: Chân của port mà phím kết nối có giá trị từ 0-7
-time: thời gian trì hoãn để chống dội phím (khoảng 100ms)
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 63
Yêu cầu
Chân kết nối với phím phải cấu hình là ngõ vào
Ví dụ
bit oldstate; // Cờ trạng
thái
trước
void main() {
DDC0_bit = 0; // Cấu hình PORTC
0 là ngã
vào
DDRA = 0xFF; //Cấu hình
PORTA là ngã
ra
PORTA = 0xAA; // Tạo giá trị đ
ầu cho
PORTA
oldstate = 0;
do {
if (Button(&PINB, 0, 1, 0)) { // Phát hiện được
phím ấn
oldstate = 1; // Cập nhật cờ -
đặt
}
if (oldstate && Button(&PINB, 0, 1, 0)) {
//Trước đó có phím
ấn và bây giờ có phím ấn thì thực
hiện
PORTC = ~PORTC; // Đảo PORTC
oldstate = 0; // Cập nhật cờ -
xóa
}
} while(1); // Vòng l
ặp mãi
mãi
}
Hãy biên dịch và chạy mô phỏng ví dụ trên, đã có sự cải tiến khi dùng
biến oldstate (trạng thái cũ) để kiểm tra xem tín hiệu nhận vào đã ổn định chưa
rồi mới thực thi. Tuy nhiên, khi bỏ qua thời gian delay (thời gian delay trong
chương trình trên = 1 xem như bỏ qua) thì công việc thực thi quá nhanh khiến
người dùng không kiểm soát được. Vì vậy ta tiến hành xây dựng 1 chương
trình chống dội phím khác với yêu cầu đặt ra là:
+ Thực thi công việc 1 lần ngay sau khi ấn phím.
+ Công việc chỉ thực hiện lần nữa khi nhả phím và ấn lại lần nữa.
+Khi giữ phím thì các công việc khác(các đoạn lệnh khác của chương
trình) vẫn hoạt động bình thường.
Từ các yêu cầu trên, ta tham khảo giải thuật chống dội phím ở phần tiếp
theo.
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 64
3. Chống dội phím bằng phương pháp phát hiện cạnh lên.
Lưu đồ giải thuật chống dội phím:
Có
Có
Bắt đầu
Đọc mức logic ở tất cả
các phím, cho biết vị
trí phím bị tác động
(từ 1 đến n).
Có phím bị
tác động hay
không?
Phím có được
ấn trước đó
hay không?
Không Không
Trì hoãn 20ms
Phím đã nhả, cho phép
xử lý công việc nếu lần
tiếp theo có phím ấn
Báo là lần đọc này không
có phím ấn
Báo hiệu là phím đang
được ấn. Trả về vị trí
phím đọc được để bắt
đầu xử lý (xử lý xong
thì không cho phép xử
lý công việc này đến
khi phím nhả).
Thoát
Đọc mức logic ở tất cả
các phím, cho biết vị
trí phím bị tác động
(từ 1 đến n) lần nữa.
Có phím bị tác
động hay
không?
Không
Có
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 65
Giải thích:
Bắt đầu chương trình con đọc phím chống dội:
+Gọi hàm đọc phím: hàm này sẽ dùng hàm Button của MikroC để đọc
trạng thái các chân kết nối với phím và trả về vị trí phím(ưu tiên các phím
có thứ tự thấp).
+Nếu hàm trả về 0 nghĩa là hiện tại không có phím bị tác động, ta xét
tiếp:
-Trước đó có phím ấn: báo là lần đọc này không có phím ấn bằng
biến pr (pr=1 thì có phím ấn và bằng 0 là không có phím ấn) và thoát ra mà
không trả về giá trị nào cả.
-Trước đó không có phím ấn: các phím đang ở trạng thái không
bị tác động nên thoát ra mà không trả về giá trị nào cả.
+Nếu hàm trả về vị trí phím bị tác động thì tại trì hoãn 20ms sau đó gọi
hàm đọc phím lần nữa.
+Nếu hàm trả về 0 nghĩa là hiện tại không có phím bị tác động, ta có thể
nói lần đọc trước đó phím bị tác động là do dội cơ khí. Thoát ra mà không
trả về giá trị nào cả.
+ Nếu hàm trả về vị trí phím bị tác động (không thể khác giá trị trước đó
vì 20ms thì người dùng ko đủ thời gian nhả phím và ấn lại phím khác) thì
khẳng định đã có phím được ấn. Thoát khỏi hàm đọc phím – chống dội và
trả về vị trí phím đọc được.
Chương trình chính sẽ lấy giá trị phím đọc được đem đi xử lý. Điều kiện
xử lý là:
Vị trí phím mới nhận được là số liệu mới(đã nhả phím và ấn phím).
Phải có điều kiện này là do nếu lần sau không có phím nhấn, số liệu cũ
vẫn còn nên chương trình sẽ xử lý tiếp gây sai yêu cầu.
Điều kiện số liệu nhận được là số liệu mới ta thực hiện như sau:
+Sau khi thực hiện công việc xong thì xóa biến flag để báo là xử lý xong
không cho phép xử lý tiếp.
+Nếu không có phím ấn nữa thì đặt lại flag để báo là đã nhả phím.
+Trước khi xử lý công việc thì kiểm tra là có phím nhấn(pr=1) và trước
đó đã nhả phím (flag=1).
Sau đây là code tham khảo:
Bài 1 _ 2 _Mau: Chương trình đọc phím chống
dội tham khảo
char key, pr,flag;
//HAM DOC PHIM - TRA VE VI TRI PHIM DUOC AN
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 66
char Button_Read(){
if(Button(&PINC,0,10,0)) return 1;
if(Button(&PINC,1,10,0)) return 2;
if(Button(&PINC,2,10,0)) return 3;
if(Button(&PINC,3,10,0)) return 4;
return 0;
}
//HAM DOC PHIM VA CHONG DOI
char Button_Read_Debounce(){
char temp;
temp=Button_Read();
if(temp==0){
if(pr==1){
pr=0;
return;
}
else {
flag=1;
return;
}
}
else{
delay_ms(50);
temp=Button_Read();
if(temp==0) return;
else{
pr=1;
return temp;
}
}
}
//CHUONG TRINH CHINH
void main(){
DDRA=0xff;
DDRC=0x00;
key= Button_Read_Debounce();
if((pr!=0)&&(flag==1)){
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 67
flag=0;
công việc ;
}
}
Thực hành kết hợp ứng dụng đọc phím và điều khiển led.
Tạo file nguồn mới với tên là BAI1_TH1. Soạn thảo và biên dịch
chương trình với yêu cầu sau :
+Dùng 2 phím nhấn điều khiển 8 led.
+Khi ấn phím thứ nhất các led sáng dần từ trái sang phải rồi tắt dần từ trái sang
phải.
+Khi ấn phím thứ hai thì led sáng từ 2 biên vào rồi tắt từ biên vào.
Bài tham khảo :
Bai1 _ TH: Thực hành chống dội phím và điều
khiển led
char key, pr, flag, i, j;
//HAM DOC PHIM
//HAM DOC PHIM - TRA VE VI TRI PHIM DUOC AN -
MUC TAC DONG PHIM LA
THAP
char Button_Read(){
if(Button(&PINC,0,10,0)) return 1;
if(Button(&PINC,1,10,0)) return 2;
if(Button(&PINC,2,10,0)) return 3;
if(Button(&PINC,3,10,0)) return 4;
return 0;
}
//HAM DOC PHIM VA CHONG DOI
char Button_Read_Debounce(){
char temp;
temp=Button_Read();
if(temp==0){
if(pr==1){
pr=0;
return;
}
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 68
else {
flag=1;
return;
}
}
else{
delay_ms(50);
temp=Button_Read();
if(temp==0) return;
else{
pr=1;
return temp;
}
}
}
//CHUONG TRINH CHINH
void main(){
DDRA=0xff;
DDRc=0x00;
while(1){
key= Button_Read_Debounce();
if((pr==1)&&(flag==1)){
flag=0;
switch(key){
case 1:
PORTA=0x00;
for(i=0;i<=7;i++){
PORTA=0x01<<i|PORTA;
delay_ms(50);
}
for(i=0;i<=7;i++){
PORTA=0xFE<<i&PORTA;
delay_ms(50);
}
break;
case 2:
PORTA=0x00;
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 69
for(i=0;i<=3;i++){
PORTA=0x01<<i|0x80>>i|PORTA;
delay_ms(150);
}
for(i=0;i<=3;i++){
PORTA=0x7F>>i&0xFE<<i&PORTA;
delay_ms(150);
}
break;
}
}
}
}
- Thử bỏ dòng lệnh flag=0 và kiểm tra kết quả.
- Hãy viết thêm vài ứng dụng điều khiển led cho các phím còn lại
III. Thực hành các kiểu dữ liệu.
Việc sử dụng thành thạo các kiểu dữ liệu là khá quan trọng, nó giúp ta
tránh các lỗi thông thường nhưng khó phát hiện (ví dụ như vòng lặp hữu hạn
nhưng lại lặp vô hạn).
a. Tiến hành soạn thảo và biên dịch chương trình sau :
Bai1_3_A : Thực hành các kiểu dữ liệu
// KHAI BAO CAC BIEN KIEU NGUYEN
unsigned char _unsigned_char;
signed char _signed_char;
int _signed_short;
unsigned short _unsigned_short;
unsigned int _unsigned_int;
signed long _signed_int;
char bin[10];
char i;
// KHAI BAO CAC BIEN KIEU SO THUC
float _float;
double _double;
long _long_double;
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 70
//CHUONG TRINH CHINH
void main(void){
// GAN CAC BIEN KIEU NGUYEN
_unsigned_char=20;
_signed_char=_unsigned_char -50;
_signed_short=255;
_unsigned_short=255;
_unsigned_int=65534;
_signed_int=65535;
// GAN CAC BIEN KIEU O THUC
_float=-255.124;
_double=-255.124;
_long_double=-235.124;
}
Dùng công cụ debuger (F9) để chạy mô phỏng chương trình rồi điền kết quả
vào bảng sau :
Bảng 1 :
Biến Số byte Giá trị
_unsigned_char
_signed_char
_signed_short
_unsigned_short
_signed_int
_unsigned_int
_signed_long
_unsigned_long
Bảng 2:
Biến Số byte Giá trị
_float
Lập trình vi điều khiển AVR với ngôn ngữ C WWW.EEELABS.ORG
Trần Thừa – 2010 71
_double
_long_double
Các bạn hãy tự thay đổi các giá trị của các biến sau đó tiến hành debug
lại chương trình, quan sát sự thay đổi các giá trị để hiểu về các kiểu dữ liệu cơ
bản.
![[8051] - Lập trình ngắt cơ bản](https://media.store123doc.com/images/document/14/y/hp/medium_gGfKteB11G.jpg)