Đồ án truyền động điện chỉnh lưu hình tia 3 pha
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (549.93 KB, 47 trang )
KHOA CN CƠ ĐIỆN & ĐIỆN TỬ
BỘ MÔN CN KỸ THUẬT Đ&ĐT
CỘNG HÒA XÃ HỘI CHỦ NGHĨ VIỆT NAM
Độc lập – Tự do – Hạnh phúc
----------------o0o----------------
THUYẾT MINH
ĐỒ ÁN MÔN HỌC TỰ ĐỘNG ĐIỀU CHỈNH TRYỀN ĐỘNG ĐIỆN
Họ và tên sinh viên
:
Mã số sinh viên, lớp HP :
Giáo viên hướng dẫn
:
Ngày giao đề tài
:
Ngày nộp
:
Tên đề tài: Thiết kế hệ thống tự động điều chỉnh truyền động điện (yêu cầu và
số liệu kèm theo)
Nội dung:
I. Thuyết minh
1. Phân tích, lựa chọn phương án truyền động
2. Thiết kế sơ đồ nguyên lý mạch động lực
3. Thiết kế sơ đồ nguyên lý mạch điều khiển
4. Tính chọn thiết bị
5. Xây dựng đặc tính tĩnh.
6. Thuyết minh sơ đồ nguyên lý
II. Các bản vẽ: 03 bản vẽ Ao
- Sơ đồ nguyên lý hệ thống
- Giản đồ điện áp mạch động lực và mạch điều khiển.
- Đặc tính tĩnh hệ thống.
Số liệu và yêu cầu thêm như sau:
- Phụ tải Mc = hằng số, mang tính chất phản kháng.
- BBĐ dùng sơ đồ chỉnh lưu tia 3 pha.
- Động cơ một chiều kích từ độc lập có cơng suất từ 2,5 - 4 KW.
- Phạm vi điều chỉnh tốc độ D = 100/1; Sai lệch tĩnh st% = 5%.
Ngày tháng năm 2020
Giáo viên hướng dẫn
THUYẾT MINH ĐỒ ÁN MÔN HỌC
I.Tên đề tài:
Thiết kế hệ thống tự động điều chỉnh truyền động điện (yêu cầu và số liệu
kèm theo)
- Phụ tải Mc = hằng số, mang tính chất phản kháng.
- BBĐ dùng sơ đồ chỉnh lưu tia 3 pha.
- Động cơ một chiều kích từ độc lập có cơng suất từ 2,5 - 4 KW.
- Phạm vi điều chỉnh tốc độ D = 100/1; Sai lệch tĩnh st% = 5%.
II. Nội dung:
1.
2.
3.
4.
5.
6.
Phân tích, lựa chọn phương án truyền động
Thiết kế sơ đồ nguyên lý mạch động lực
Thiết kế sơ đồ nguyên lý mạch điều khiển
Tính chọn thiết bị
Xây dựng đặc tính tĩnh.
Thuyết minh sơ đồ nguyên lý
III. Bản vẽ A0: 03 bản vẽ Ao
- Sơ đồ nguyên lý hệ thống
- Giản đồ điện áp mạch động lực và mạch điều khiển.
- Đặc tính tĩnh hệ thống.
Bản thuyết minh đã được thông qua ngày
Giáo viên hướng dẫn
tháng
năm 2020
LỜI NÓI ĐẦU
Ngày nay sự phát triển mạnh mẽ và vượt bậc của khoa học kỹ thuật thì truyền động
điện là một lĩnh vực có vai trị then chốt trong sự phát triển này, hàng loạt các hệ thống
truyền động điện ứng dụng các linh kiện hiện đại ra đời nhằm đáp ứng những u cầu
cơng nghệ chính xác và chất lượng cao. Chúng gọn nhẹ nhưng lại tinh vi hơn, có thể
đảm nhiệm được các cơng việc khó khăn hơn rất nhiều so với hệ thống cũ.
Các tiến bộ khoa học kỹ thuật được đặc trưng bởi sự biến đổi khơng ngừng của việc
tự động hố sản xuất trong tất cả các lĩnh vực của nền kinh tế quốc dân. Tự động hoá
nhằm tăng năng suất lao động, giảm giá thành sản phẩm và nâng cao trình độ sản xuất.
Chính vì vậy mà một trong các yếu tố để đánh giá nền sản xuất hiện đại là trình độ áp
dụng tự động hoá trong các nghành sản xuất.
Trong khi trình bày em đã thể hiện sát nội dung và các yếu tố trên. Qua việc tính
tốn và khảo sát đã rút ra nhiều kết luận cần thiết để đánh giá chất lượng và chọn các
thông số của hệ thống. Tuy nhiên do thời gian và trình độ có hạn nên trong đồ án này
vẫn cịn nhiều thiếu sót. Em rất mong các thầy cô giáo thông cảm và ân cần chỉ bảo
cho em.
Em xin chân thành cảm ơn sự giúp đỡ tận tình của thầy ………………cùng các
thầy cơ giáo trong khoa đã giúp đỡ em hoàn thành bản đồ án này.
Thái nguyên: Ngày tháng năm 2020
Sinh viên
PHẦN I: PHÂN TÍCH, LỰA CHỌN PHƯƠNG ÁN TRUYỀN ĐỘNG
1.1 Đặt vấn đề
Để thiết kế một hệ thống truyền động điện ta phải căn cứ vào đặc điểm công
nghệ của nó để đưa ra phươn án hợp lý. Mỗi phương án đều có ưu nhược điểm khác
nhau, phương án đưa ra phải đảm bảo tiêu chí kỹ thuật cũng như về mặt kinh tế.
Việc lựa chọn đúng phương án truyền động điện (loại động cơ, phương pháp
điều chỉnh tốc độ, BBĐ..) để phục vụ cho sản xuất có ý nghĩa rất lớn Nó liên quan đến
chất lượng của sản phẩm và hiệu quả kinh tế. Nếu như lựa chọn đúng thì ta có thể tăng
năng suất làm việc hạn chế được những hành trình thừa. Để đảm bảo thiết kế cho đề tài
đã cho là: Thiết kế hệ thống tự động điều chỉnh truyền động điện tự động không đảo
chiều với tải phản kháng có Mc = hằng số; D = 100/1; Sai lệch tĩnh st% = 5%; điều
chỉnh trơn có khả năng hạn chế phụ tải và dừng chính xác. (Động cơ có cơng suất
từ 2,5 - 4 KW, BBĐ dùng sơ đồ chỉnh lưu tia 3 pha). Ta chọn Động cơ điện 1 chiều
kích từ độc lập và chọn phương pháp thay đổi tốc độ bằng các thay đổi điện áp mạch
phần ứng động cơ. Phương pháp này có 3 phương án: Phương án 1: Hệ truyền động
máy phát - động cơ (hệ F-Đ). Phương án 2 Hệ truyền động thyristor - động cơ (hệ TĐ). Phương án 3: Hệ truyền động xung áp - động cơ (hệ XA-D).
Ta đi vào xét từng hệ truyền động và chọn ra hệ truyền động phù hợp nhất.
1.2 Phân tích một số phương án truyền động điện
1.2.1. Phương án 1: Hệ máy phát -động cơ điện 1 chiều kích từ độc lập
hệ F-Đ
1.2.1.1. Sơ đồ nguyên lý:
Hình 1.1: Hệ thống máy phát-động cơ điện một chiều kích từ độc lập (F-D) hai mạch
vòng
Các phần tử trong sơ đồ:
- Đ là động cơ truyền động
- FT là máy phát
- ĐK là động cơ điện xoay chiều (động cơ đồng bộ hoặc không đồng bộ)
- Yn là phản hồi âm tốc độ
- βId là phản hồi âm dòng điệnId là phản hồi âm dòng điện
- R là bộ điểu chỉnh tốc độ quay
- Ri là bộ điều chỉnh dòng điện
- CBI là cảm biến dịng điện
1.2.1.2. Dạng đặc tính tĩnh
Giả thiết với các khâu trong hệ là lý tưởng, 2 bộ điều chỉnh là khâu PI thì đặc tính
tĩnh có dạng như sau:
1.2.1.3. Nhận xét:
Ưu điểm:
- Hệ thống làm việc rất linh hoạt.
- Họ đặc tính cơ có dạng tuyến tính.
- Việc điều chỉnh đều được thực hiện trên mạch kích từ nên thuận tiện cho tự động
hoá, nâng cao chất lượng hệ thống.
- Có hệ số khuyếch đại lớn.
Nhược điểm:
- Kích thước lớn
- Quán tính điện từ mạch kích từ máy phát lớn gây ảnh hưởng tác động nhanh của
hệ thống.
- Hiệu suất thấp.
- Vận hành nhiều tiếng ồn và duy tu bảo dưỡng khá phức tạp.
- Hệ thống cổ góp của máy phát phải thay thế bảo dưỡng thường xuyên dẫn đến chi
phí cao.
1.2.2. Phương án 2: Hệ thống chỉnh lưu điều khiển thyristor- động cơ điện một
chiều kích từ độc lập hệ (T-Đ).
1.2.2.1. Sơ đồ nguyên lý hệ thống (dạng tổng quát)
Các phần tử trong hệ thống:
- Đ là động cơ truyền động
- F là máy phát
- Yn là phản hồi âm tốc độ
- βId là phản hồi âm dòng điệnId là phản hồi âm dòng điện
- CKĐ là cuộn kháng điện
- FX là khâu phát xung điều khiển cho các thyristor của BĐ
- R là bộ điểu chỉnh tốc độ quay
- Ri là bộ điều chỉnh dòng điện
- Ucd là điện áp chủ đạo
- UdtT là các xung điều khiển các van chỉnh lưu
- CBI là cảm biến dòng điện
1.2.2.2. Dạng đặc tính tĩnh
Có dạng giống như dạng đặc tính tĩnh của hệ máy phát - động cơ điện một chiều
kích từ độc lập (hệ F-Đ).
1.2.2.3. Nhận xét
Uu điểm: - Có tính kinh tế cao
- Độ tin cậy cao
-Ưu việt về mặt kỹ thuật
Nhược điểm: - Đảo chiều dịng điện gặp nhiều khó khăn
1.2.3 Phương án 3: Hệ thống chỉnh lưu không điều khiển –xung áp động cơ điện
một chiều kích từ độc lập (hệ XA-Đ).
1.2.3.1. Sơ đồ nguyên lý hệ thống (dạng tổng quát)
Hình 1.5
Các thành phần trong sơ đồ:
- Đ là động cơ truyền động
- FT là máy phát
- Yn là phản hồi âm tốc độ
- βId là phản hồi âm dòng điệnId là phản hồi âm dòng điện
- CK là cuộn kháng
- FX là khâu phát xung điều khiển cho các thyristor của BĐ
- R là bộ điểu chỉnh tốc độ quay
- Ri là bộ điều chỉnh dòng điện
- Ucd là điện áp chủ đạo
- CLKĐK là bộ chỉnh lưu không điều khiển (dùng đi ốt)
-UdtT là các xung điều khiển các van chỉnh lưu
- XA là xung áp
1.2.3.2. Dạng đặc tính tĩnh
Dạng đặc tính tĩnh có dạng như dạng đặc tính tĩnh của hệ máy phát - động cơ điện 1
chiều kích từ độc lập (hệ F-Đ).
1.2.3.2 Nhận xét
Ưu điểm: - dòng điện động cơ tương đối bằng phẳng, cho phép tang chất lượng và
phạm vi điều tốc khá rộng
- tổn hao và phát nhiệt của dộng cơ trong hệ này nhỏ
- độ tác động nhanh cao do tần số đóng cắt cao
- hiệu suất của thiết bị tương đối cao
Nhược điểm: - sử dụng nhiều linh kiện điện tử gây tốn kém kinh tế
- cấu tạo phức tạp.
1.2.4 Chọn phương án truyền động điện
Sau khi đưa ra 3 phương án trên kết hợp với các chỉ tiêu kinh tế kỹ thuật và khả năng
vận hành cùng với điều kiện phát triển của khoa học kỹ thuật em thấy phương án hệ FĐ hiệu suất thấp; cịn phương án hệ XA-Đ thì có chất lượng tốt nhưng chi phi đầu tư
cao. Vậy em chọn phương án dùng T-Đ. Vì phương án này có nhiều ưu điểm phù hợp
với yêu cầu đặt ra.
PHẦN II: THIẾT KẾ SƠ ĐỒ NGUYÊN LÝ MẠCH ĐỘNG LỰC
2.1 Đặt vấn đề
Như vậy mạch lực gồm: động cơ 1 chiều, bộ biến đổi và các thiết bị phụ trợ khác.
Các thiết bị phụ trợ phụ thuộc vào sơ đồ bộ biến đổi vậy nên nhiệm vụ phần này là
thiết kế được sơ đồ nguyên lý BBĐ.
Bộ biến đổi T-Đ có rất nhiều loại sơ đồ, song để thực hiện tốt các u cầu cơng
nghệ thì ta phải tiến hành phân tích các sơ đồ và chọn ra một sơ đồ biến đổi phù hợp
với yêu cầu công nghệ đặt ra. Vì mỗi loại sơ đồ có ưu nhược điểm khác nhau và thích
hợp cho từng loại yêu cầu công nghệ.
2.2 Chọn sơ đồ BBĐ
Với yêu cầu cơ bản của phụ tải thì ta có thể sử dụng nhiều sơ đồ chỉnh lưu khác
nhau như chỉnh lưu cầu 1 pha, chỉnh lưu cầu 3 pha, chỉnh lưu tia 2 pha, chỉnh lưu tia 3
pha… vậy để chọn được bộ biến đổi phù hợp ta đi vào so sánh các bộ biến đổi.
Sơ đồ cầu 1 pha: sơ đồ khá đơn giản
Sơ đồ hình tia 2 pha: sơ đồ khá đơn giản
Sơ đồ cầu 3 pha: sơ đồ phức tạp
Sơ đồ hình tia 3 pha: sơ đồ khá phức tạp
+Số van:
Sơ đồ cầu 1 pha: 4 van
Sơ đồ hình tia 2 pha: 2 van
Sơ đồ cầu 3 pha: 6 van
Sơ đồ hình tia 3 pha: 3 van
+ Điện áp qua van
Sơ đồ cầu 1 pha
Udo
UTth max UTng max 2
Udo
Sơ đồ tia 2 pha UTth max UTng max 2
Udo
Sơ đồ cầu 3 pha UTth max UTng max 3
Sơ đồ hình tia 3 pha UTth max UTng max
+ Dòng điện qua van
2.Udo
3
Sơ đồ cầu 1 pha IT Id / 2
Sơ đồ cầu 3 pha IT Id /
3
Sơ đồ tia 2 pha IT Id / 2
3
Sơ đồ hình tia 3 pha IT Id /
Sơ đồ hình tia có: Hình tia có điốt Do và hình tia khơng có điốt Do
Sơ đồ hình cầu có: Hình cầu có điốt Do và hình cầu khơng có điốt Do
2.2.1 Chọn sơ đồ cụ thể cho bộ điều khiển
Phần trước ta đã chọn sơ đồ chỉnh lưu tia 3 pha
a. Sơ đồ nguyên lý
A
B
iA
iB
iC
C
*
BA
T1
* a ia
iT1
*
*
T2
b ib
iT2
*
*
c ic
iT3
O
ud
Ed
Ld
T3
K
Rd
id
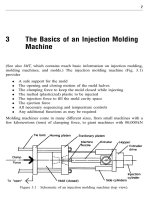
Hình 2.19: Sơ đồ chỉnh lưu hình tia 3 pha
- BA là máy biến áp 3 pha dùng để cung cấp cho sơ đồ chỉnh lưu. Tổ nối dây của
máy biến áp có thể là Y/Y0, /Y0, Y/Z0 hoặc /Z0,
- Các thyristor T1, T2, T3 dùng để biến điện áp xoay chiều 3 pha bên thứ cấp máy
biến áp BA là ua, ub, uc thành điện áp một chiều trên tải u d và điều chỉnh thành phần
một chiều của ud.
- Rd, Ld, Ed là các phần tử phụ tải của bộ chỉnh lưu.
- iA, iB, iC dòng các pha cuộn dây sơ cấp của BA.
- ia, ib, ic dòng các pha cuộn dây thứ cấp của BA
- iT1, iT2, iT3 dòng các van chỉnh lưu.
- id dòng điện chỉnh lưu tức thời.
b. Nguyên lý làm việc
Xét sự làm việc của sơ đồ với trường hợp là khi giả thiết L d =. Giả thiết: sơ đồ
làm việc với một góc điều khiển bằng , sơ đồ đã làm việc xác lập trước thời điểm bắt
đầu xét (t = 0), thời điểm bắt đầu xét trùng với thời điểm đầu nửa chu kỳ dương của
điện áp thứ cấp pha A (ua). Với các giả thiết trên thì dạng điện áp thứ cấp máy biến áp
được biểu diễn như trên hình 2.20, dịng tải i d là liên tục và bằng phẳng ngay từ thời
điểm bắt đầu xét. Do giai đoạn từ t = 0 đến trước thời điểm t = 1 = thì van T1
vẫn khóa, dựa vào đặc điểm làm việc của bộ chỉnh lưu, tạm giả thiết là giai đoạn này
van T3 làm việc.
Khi T3 đang dẫn dòng, bỏ qua sụt áp trên nó thì điện áp trên T 1 sẽ là uT1 = uac, và
lân cận trước thời điểm t =1 thì uac > 0, tức là van T1 có điện áp thuận, vì vậy, tại
thời điểm t = 1 = , van T1 được cấp tín hiệu điều khiển thì T1 sẽ mở và uT1 giảm về
bằng không. Do uT1 = 0, từ sơ đồ xác định được: ud =ua, điện áp trên T3 là
u T3 u c u a u ca , u = u . Tại t = = thì u < 0 tức là T bị đặt điện áp ngược
T3
ba
1
ca
,
3
nên khoá lại, van T2 vẫn đang khóa, do vậy trong khoảng tiếp sau 1 trong sơ đồ chỉ có
van T1 dẫn dịng.
Đến t = , ua bằng khơng và bắt đầu chuyển sang âm, nó bắt đầu tác động
ngược với chiều dòng qua T1. Do các van T2 và T3 vẫn khóa nên T1 vẫn tiếp tục dẫn
dịng dưới tác dụng của s.đ.đ. tự cảm sinh ra trong Ld.
Tại t = 2 (2 là thời điểm chậm sau thời điểm mở tự nhiên đối với van T 2 một
2
5
6
), van T2 nhận được tín hiệu điều khiển, do đang có
góc độ điện bằng :
điện áp thuận (uT3=uba, tại t= 2 thì uba> 0) nên T2 mở. Khi T2 mở, sụt điện áp trên nó
giảm về bằng khơng, khi đó uT1 = uab và uT3= ucb. Tại t = 2, điện áp uab < 0, tức là
van T1 bị đặt điện áp ngược, dẫn đến T 1 khóa lại, như vậy từ thời điểm t = 2 trong sơ
đồ chi có van T2 làm việc (T3 vẫn đang khóa).
u
ud (nét đậm)
ua
ub
uc
ua
1
0
2
3
4 t
2
Tương tự như vậy,
đến t = 3, van T3 được
cấp tín hiệu điều khiển và
có điện áp thuận (vì lúc
này uT3 = ucb > 0) nên T3
mở. Van T3 mở, sụt điện áp
trên nó giảm về bằng
khơng thì T2 sẽ bị đặt điện
áp ngược (lúc này uT2 = ubc
0) và khóa lại, trong sơ đồ
lúc này chỉ có van T 3 làm
việc. Đến t = 4 = 1 +
2, T1 lại được cấp xung
điều khiển, T1 lại mở và T3
khóa lại, sơ đồ lặp lại trạng
thái làm việc giống như từ
t = 1. Tóm tắt sự làm
việc của sơ đồ chỉnh lưu
hình tia 3 pha khi tải có
điện cảm vô cùng lớn trong
hơn một chu kỳ như sau:
iT1=i
a 0
iT2=i
b 0
iT3=i
c 0
t
Id
t
iA
0
t
2Id/
(3kba)
<
iB
0
t
iC
Id/
(3kba)
0
u
T
1
t
ua
c
ua
b
t
0
Các khoảng: t = 0
t = 1 và t = 3 t =
4, van T3 dẫn dòng: ud = uc
iT1 = 0; iT2
iT3 = id = Id;
uT1 = uac;
t
Hình 2.20: Đồ thị điện áp, dịng điện của sơ đồ
chỉnh lưu hình tia 3 pha khi tải có Ld =
=
0;
uT2 = ubc; uT3 = 0.
Khoảng: t = 1 t = 2 và từ t = 4 …, T1 dẫn dòng: ud = ua
iT1 = id = Id;
iT2 = 0;
iT3 = 0;
uT1 = 0;
uT2 = uba; uT3 = uca.
Khoảng: t = 2 t = 3, van T2 dẫn dòng: ud = ub
iT1 = 0; iT2 = id = Id;
iT3 = 0;
uT1 = uab;
uT2 = 0; uT3 = ucb.
Dòng điện các cuộn dây thứ cấp BA bằng dòng các van:
ia = iT1;
ib = iT2;
ic = iT3.
Dòng điện cuộn dâysơ cấp BA: Tùy thuộc vào tổ nối dây máy biến áp và sẽ
xét ở phần sau.
c. Các biểu thức tính tốn cơ bản
Điện áp chỉnh lưu trung bình:
U d U do cos
, với
U do
3 6
U 2 1,17U 2
2
Dòng trung bình qua các thyristor:
I Ttb
Id
3
Dịng hiệu dụng qua các thyristor:
IT
Id
3
Điện áp ngược lớn nhất trên thyristor:
U Tngmax 6U 2
Điện áp thuận lớn nhất trên thyristor:
U Tthmax 6U 2
Dòng hiệu dụng cuộn dây thứ cấp (I 2) và cuộn dây sơ cấp (I1) máy biến áp
khi tổ nối dây Y/Y0:
I2
Id
;
3
I1
Id
k ba 3
Cơng suất tính tốn máy biến áp khi tổ nối dây là Y/Y0 và /Y0:
S1 3U1I1
2.U d I d
S2 3U 2 I2
SttBA
3. 3 ;
2..U d .Id
3. 2
S1 S2
( 3 2).U d Id 1,355.U d .I d
2
3. 6
2.3. Chọn phương pháp hãm dừng động cơ.
Hãm là trạng thái mà động cơ sinh mômen quay ngược chiều tộc độ quay hiện thời,
trong tất cả các trạng thái hãm động cơ đều làm
W0
việc ở chế độ máy phát.
Động cơ một chiều kích từ độc lập có 3 trạng
W0
thái hãm:
+ Hãm tái sinh.
+ Hãm ngược.
+ Hãm động năng.
W0
W0
W0
Hình 2.8 Đặc tính hãm tái
sinh động cơ một chiều kích
từ độc lập
2.3.1. Hãm tái sinh
Hãm tái sinh xảy ra khi tốc độ quay của động cơ xảy ra khi tốc độ quay của động cơ
lớn hơn tốc độ quay không tải lý tưởng. Khi hãm tái sinh E ư > Uư. Động cơ làm việc
như một máy phát điện mắc song song với lưới. Dịng điện và mơmen hãm đổi chiều
và được xác định theo biểu thức.
Ih
U u .E u K.0 K
0
R
R
Mh = K..I < 0.
Dấu [< 0] thể hiện dịng điệnvà mơmen đảo dấu.
Vì sơ đồ mạch động lực vẫn khơng đổi nên phương trình đặc tính cơ có dạng:
W
U u R u R
.M
K (K) 2
Nhận xét: Trạng thái hám tái sinh dòng điện hãm đảo chiều và công suất được trả về
lưới điện.
P = (E – U).I . Đây là phương pháp hãm kênh kinh tế nhất vì động cơ sinh ra năng
lượng hữu ích.
W
W0
a
M
Có 2 trường hợp hãm ngược.
0
cơ cấu sản xuất.
-Mc
cơ khi đó chống lại sự chuyển động của
Wod
từ của động cơ. Mômen sinh ra của động
-W0
năng quay ngược chiều với mômen điện
c
bộ phận truyền động, hoặc do mômen thế
d
dưới tác dụng điện năng tích luỹ trong các
Hình 2.9 Đặc tính hãm ngược của
Động cơ một chiều kích từ độc lập
Trạng thái hã ngược xẩy ra khi phần ứng
b
2.3.2. Hãm ngược.
+ Đưa diện trở vào mạch phần ứng.
+ Đảo chiều điện áp mạch phần ứng.
Giả sử động cơ đang làm việc tại điểm a trên đặc tính tự nhiên tải M c. Đổi chiều điện
áp phần ứng và đưa thêm điện trở phụ vào mạch.
Khi đó:
Ih
U u E u
R u R f
Với phương pháp này dịng điện hãm có chiều ngược với chiều dịng điện làm việc
ban đầu và nó có giá trị lớn. Do đó điện trở phụ đưa vào phải có giá trị đủ lớn để hạn
chế dịng điện hãm ban đầu.
Ih ( 2 2.5)Iđm
Phương trình đặc tính cơ có dạng:
U u R u R f
.M
K
(K) 2
Phương pháp này khơng tối ưu vì dịn điện hãm lớn nên làm phát nóng
động cơ.
2.3.3. Hãm động năng
Hãm động năng là trạng thái động cơ làm việc như một máy phát mà năng lượng
của động cơ đã được tích luỹ trong q trình làm việc trước đó biến thành điện năng
tiêu tán trong mạch hãm dưới dạng nhiệt. Có 2 trạng thái hãm động năng:
+ Hãm động năng tự kích.
+ Hãm động năng kích từ độc lập.
ở đây ta đang xét phương pháp hãm động năng kích từ độc lập khi động cơ đang
quay muốn hãm động năng ta cắt phần ứng của động cơ ra khỏi lưới điện một chiều và
đóng vào điện trở hãm. Mạch kích từ vẫn nối với nguồn như cũ.
Tại thời điểm ban đầu tốc độ động cơ vẫn có giá trị nên:
E = K..
Và dòng điện hãm ban đầu:
Ih
E
K..
0
R u R h R u R h
M h K..I h 0
Ih và Mh ngược chiều với Iư và M
Khi hãm động năng Uư = 0 nên ta có phương trình đặc tính sau:
R u R h
R R
.I u u 2 h .M
K
(K)
Khi = const thì độ cứng đặc tính cơ hãm phụ thuộc vào R h. Rh càng nhỏ thì đặt tính
cơ càng cứng, mơmen hãm càng lớn và hãm càng nhanh.
Chú ý:
b2
Mh2
M
Hình 2.
động c
1
h1 0
W0
W
Đặc tính hãm động năng
một chiều kích từ độc lập
Cần chọn Rh sao cho dòng điện hãm ban đầu nằm trong giới hạn cho phép :
c2
C1
a
Ih = ( 2 2,5).Iđm
Khi hãm động năng kích từ độc lập, năng lượng chủ yếu được tạo ra do dộng năng
TN
của động cơ tích luỹ được nên cơng suất tiêu tán chỉ nằm trong mạch kích từ.
M
PKT đm = ( 1 5) % Pđm
Phương trình cân bằng cơng suất khi hãm động năng.
Eư.Ih = ( Rư + Rh)Ih2 .
Nhận xét các phương pháp hãm.
Trong 3 phương pháp hãm đã nêu trên thì phương pháp hãm tái sinh là kinh tế hơn cả.
Nhưng do hệ thống bộ biến đổi là hình tia 3 pha khơng có Do khơng đảo chiều nên ta không
dùng phương pháp hãm tái sinh, hãm trả năng lượng về lưới.
So với phương pháp hãm ngược, phương pháp hãm động năng hiệu quả kém hơn khi
chúng có cùng tốc độ và cùng mômen cản Mc.
Tuy nhiên hãm động năng ưu việt hơn cả về mặt năng lượng. Đặc biệt là hãm động
năng tự kích vì khơng tiêu thụ năng lượng từ lưới nên phương pháp này có thể hãm khi
sự cố mất điện.
2.4 Lựa chọn các thiết bị bảo vệ
-Mạch quá bảo vệ quá áp cho các van: biểu diễn mạch động lực và các phương pháp
nối các thiết bị bảo vệ quá áp. Để bão vệ quá áp cho các van trong sơ đồ bộ biến đổi ta
có thể sữ dụng các mạch R-C mắc theo 1 số sơ đồ khác nhau. Ta chọn sơ đồ bảo vệ
quá điện áp như hình 2.11 Một số sơ đồ bảo vệ thơng dụng.
Hình 2.11
Hình 2.12
Mạch bảo vệ q dịng:
+ bảo vệ q tải: để bảo vệ quá tải cho mạch chỉnh lưu ta dùng rơ le nhiệt hoặc át to
mát có cơ cấu cắt theo nhiệt như các thiết bị khác
+ Bảo vệ ngắn mạch: ta sữ dụng cầu chì tác động nhanh hoặc át to mát có cơ cấu cắt
nhanh.
dit
Bảo vệ quá tốc độ tăng của dòng qua van dt
dit
Trong trường hợp xảy ra quá dt đối với van thì ta nối tiếp các van với các điện
cảm thường có giá trị nhỏ. Thực tế thì các điện cảm này thường được mắc nối tiếp
trong mạch nguồn xoay chiều. Khi sơ đồ chỉnh lưu sữ dụng biến áp cung cấp thì cần
chọn máy biến áp có điện áp ngắn mạch phần trăm lớn (7% đến 10%) là đủ để bảo vệ
dit
quá dt cho các van.
-
Các thiết bị đóng cắt và bảo vệ khác
AB: aptomat dùng để bảo vệ và đóng cắt mạch điện
MBA: máy biến áp chỉnh lưu cung cấp điện áp phù hợp cho bộ chỉnh lưu, cách lý về
mặt điện giữa nguồn xoay chiều với mạch động lực của bộ chỉnh lưu.
R,C là các điện trở và điện dung dùng để bảo vệ quá gia tốc điện áp qua các van.
CK là các cuộn kháng san bằng được mắc nối tiếp với mạch động lực để san bằng
dòng điện qua phụ tải
2.5: Sơ Đồ Nguyên Lý Mạch Lực Của Hệ Thống Truyền Động
(Bản vẽ A3)
PHẦN III: THIẾT KẾ SƠ ĐỒ NGUYÊN LÝ MẠCH ĐIỀU KHIỂN
3.1 Đặt vấn đề
Để có các tín hiệu điều khiển xuất hiện theo đúng yêu cầu ,người ta sử dụng 1
mạch điều khiển để tạo ra các tín hiệu đó. Tạo ra các tín hiệu điều khiển đó gọi là
mạch phát xung.
Mạch điều khiển gồm 3 phần chính : mạch phát xung điều khiển các van chỉnh
lưu, bộ khếch đại trung gian,các mạch khác ( tạo tín hiệu chủ đạo, lấy các tín hiệu phản
hồi, mạch tạo nguồn 1 chiều cấp cho các phần mạch điều khiển hay còn gọi là nguồn
nuôi)
Để thiết kế mạch điều khiển ta thực hiện từng phần một.
3.2. Thiết kế mạch phát xung điều khiển các van chỉnh lưu.
3.2.1. Lựa chọn các phương pháp phát xung điều khiển các van chỉnh lưu
a. Các yêu cầu đối với xung điều khiển các thyristor
+ các xung có đủ điều kiện: công suất, biên độ, thời gian tồn tại để mở các thyristor
(200 μs ÷ 600 μs).
+ các xung có điều khiển được điều chỉnh đúng thời điểm.
+ phân phối các xung cho các kênh điều khiển theo đúng quy luật .
b. Các phương pháp tạo xung điều khiển các thyristor trong sơ đồ chỉnh lưu
Các hệ thống phát xung điều khiển hiện nay được phân làm 2 nhóm chính:
- nhóm các hệ thống điều khiển đồng bộ.
- nhóm các hệ thống điều khiển khơng đồng bộ.
c. Chọn phương pháp phát xung
Có 3 nguyên tắc điều khiển:
+ Nguyên tắc điều khiển theo pha đứng.
+ Nguyên tắc điều khiển theo pha ngang.
+ Nguyên tắc điều khiển dùng điốt hai cự gốc.
Ở đây ta dùng phương pháp điều khiển theo pha đứng.Sơ đồ khối theo hình vẽ.
u
I
urc
III
II
uđk
Hình 2.14
u0t
kt
Khối I: Là khối đồng bộ hoá và phát xung răng cưa.
Khối II: Là khối so sánh. So sánh tín hiệu điều khiển và điện áp rang cưa.
Khối III: Là khối gia công xung
u~ là nguồn xoay chiều, đồng pha với điện áp cấp cho sơ đồ chỉnh lưu
urc là điện áp răng cưa
uđk là điện áp điều khiển thyristor
3.2.2 Các phần mạch cơ bản của một kênh
Sau đây ta xét chi tiết các phần mạch điều khiển của hệ thống điều khiển. Ta giả
thiết là hệ thống điều khiển có nhiều kênh, ta chỉ xét 1 kênh, các kênh cịn lại tương tự.
a. Khối đồng bộ hố và phát xung răng cưa:
Trong mạch tạo xung theo nguyên tắc khống chế pha đứng điện áp so sánh và tín hiệu
điều khiển thường có dạng hình răng cưa, hoặc dạng sin (dạng cos) thường sử dụng
điện áp rang cưa. Có nhiều dạng sơ đồ khác nhau để chế tạo điện áp răng cưa, thường
những sơ đồ phức tạp thường cho điện áp tốt. Nên ta chọn sơ đồ như hình vẽ.
Hình 2.15
- Giới thiệu sơ đồ:
+ BADB: biến áp đồng bộ.
+ R1...R4: các điện trở.
+ WR: biến trở.
+ TR1, TR2: các tranzitor.
+ C1: tụ điện.
+ IC1: IC khuếch đại thuật toán.
-
Giản đồ điện áp:
u db
3
2
0
t
t
0
Hình 2.16
b. Khối so sánh
Để tạo ra một hệ thống xung xuất hiện một cách chu kỳ với chu kỳ bằng chu kỳ
điện áp răng cưa và điều khiển được thời điểm xuất hiện của mỗi xung ta sử dụng
mạch so sánh. Có thể thực hiện khâu so sánh theo nhiều mạch khác nhau nhưng phổ
biến nhất hiện nay là sơ đồ Tranzito và bộ khuếch đại thuật toán. Ở đây ta dùng bộ
khuếch đại thuật tốn. Sơ đồ có 2 tín hiệu vào là điện áp răng cưa lấy từ khâu đồng bộ
hoá và phát xung răng cưa và điện áp điều khiển 1 chiều. 2 điện áp này mắc song song
với nhau và tác dụng của chúng đối với đầu vào khâu so sánh là ngược nhau.
* Sơ đồ nguyên lý
+
Ucc
R6
R5
IC1
+
-Ucc
urc
uđk
R7
D2
Hình 2.17
Dạng điện áp ra.
U
Urc
0
Ura
Uc
c
0
Uđ
k
V1
V2
2
V1
u
V’
1
2
V2
nt
3
V2
3
ura