Điện Tử Tự Động - Tự Động Hóa Bằng Kỹ Thuật Số Phần 3 ppsx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.19 MB, 8 trang )
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 17 -
.
HÌNH 1-7.
e*(t).
Hình 1-7: Sơ đồ khối của một hệ điều khiển hoạt động theo nguyên lý bù trừ nhiễu
(feedforward control)
1.3.3 Bộ điều khiển nhiều xung (multi-element controller)
-element controller).
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 18 -
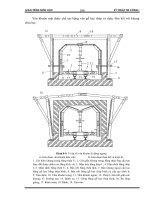
Hình 1-8: Hệ điều khiển mực nước hai xung, kết hợp độ lệch và bù trừ nhiễu
xem HÌNH 1-8, (xung chính) xung
g. N
thêm
dhv
dhv ì
[e*(t) = hr* - h].
là u(t) = Kp × e
(t)
]
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 19 -
HÌNH 1-9.
Hình 1-9: Sơ đồ khối thể hiện nguyên lý hoạt động của một hệ điều khiển 2 xung, kết
hợp độ lệch và bù trừ nhiễu
1.4 Phân loại bộ điều khiển
C
. Các
Có
Theo mức tự động
Tự động.
Bán tự động.
Bằng tay.
Theo vị trí đặt các phần tử
Tại chỗ.
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 20 -
Từ xa.
Tập trung.
Phân cụm.
Theo đại lượng được điều khiển
Vị trí.
Tốc độ.
Quá trình.
Theo chức năng
Mạch hở.
Mạch kín.
Liên hệ tới (bù trừ nhiễu).
Liên hệ ngược.
Đa biến.
Kế tiếp.
Tương tự.
Số hóa.
Theo hoạt động điều khiển được sử dụng
Tỷ lệ (P)
Vi phân (đạo hàm) (D)
Tích phân (I)
Kết hợp tỷ lệ, tích phân, vi phân (đạo hàm) (PI, PD, PID)
Theo công chất đựơc sử dụng
Khí nén.
Thủy lực.
Điện.
Cơ.
Điện tử.
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 21 -
1.5 Sơ đồ khối
Sơ đồ khối
M h thng t ng i khin th bao gm nhiu phn t k ni v nhau.
th hin các chc nng mà tng phn t thc hin trong h t ng ng ta th dùng
m s g là
.
, u
.
,
Khác v biu din toán h (mô hình toán hc) c h, s khi có u im ni b
là th hin r thc dòng tín hiu c các h thng thc. Mi khi chc nng là ký hiu
cho m phép toán áp d i v tín hiu vào c khi t ra tín hiu ra. Hàm truyn
c tng phn t th c t trong m khi tng ng có d hình ch nht, các
kh này c ni v nhau bng các m tên ch chiu lu chuyn c tín hiu.
M s khi ch các thông tin liên quan n ng ng lc hc c h
ch không h cha các thông tin liên quan n cu trúc v lý c h. Thông th
có nhiu h thng v lý khác nhau, chng liên quan gì v nhau l có th c biu din
bng cùng m s khi.
C cn lu ý rng trong m s khi thông th ngun nng l cp cho h
thng ho ng l không th hin, và s khi c mt h thng nh l có
th c biu din bng nhiu d khác nhau. Ngh là có nhiu s khi khác nhau v
cho m h thng tu thuc vào quan im phân tích c ng phân tích và lp s kh.
Hình 1-10
Các điểm đặc biệt trong sơ đồ khối
Trong các s khi còn có hai im c bi
, Adding Point)
th hin bng
m vòng tròn có d ch thp bên trong. D c (+) hoc tr (-) cho mi m tên vào
kh cho bi tín hiu c cng vào hoc bt i khi kh. Có m im cc k quan
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 22 -
tr là các tín hiu c cng vào hoc b i khi khi phi có cùng kích thc, cùng bn
ch v lý và cùng n v o.
là mt im mà t tín hiu t m khi i ng thi
nhiu khi khác hoc các im cng tín hiu trong h thng. i
uy nhiên, t
Hình 1-10: a- Một phần tử của sơ đồ khối ; b- Điểm công tín hiệu; c- Điểm rẽ nhánh.
-
-
-
-
-
.
HÌNH 1-11.
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 23 -
Hình 1-11: Sơ đồ khối đơn giản của một hệ điều khiển tự động
kh, gii
thiu mt phng pháp xây dng s khi t mt h v lý c th, và cui cùng là các k
thu n gi hoá s khi thu c.
1.6 Các yêu cầu cơ bản đối với hệ thống điều khiển.
Giá thành không quá cao
cho phép
nh
Điều khiển tự động (1) – Bùi Hồng Dương
Trang - 24 -
1.7 Ví dụ và bài tập
1.7.1 Ví dụ HÌNH 1-4 , hệ thống điều khiển nhiệt độ phòng
học.
Dữ liệu:
-
n
P
bha
1-2
(
2
)
=
@20
+
[
(
)
×
(
2
.
)]
;
(
2
)
= 0.1 /2.
;
=
20
;
@20
= 2
2
;
-
= 1
2
;
-
2
);
-
-
là 1.2 (cm);
Hình 1-12: Thermostat trong động cơ