Hướng dẫn sử dụng Kit 89 - Bài 11 doc
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (289.5 KB, 3 trang )
Hướng dẫn sử dụng Kit 89
Bài 11 : Điều khiển encoder
Mục đích:
Hiểu được nguyên lý hoạt động của encoder. Nắm vững kĩ thuật điều khiển
encoder bằng ngắt ngoài.
Yêu cầu:
Xây dựng chương trình đọc số xung encoder và hiển thị giá trị ra led 7 đoạn.
11.1 Nguyên lý điều khiển encoder
Encoder là thiết bị cảm biến được dùng phổ biến trong các ứng dụng cần đo
khoảng cách, vận tốc hoặc trong các ứng dụng cần độ chính xác cao. Hình dạng thực tế
của encoder như sau:
Cấu tạo của encoder gồm 1 vòng tròn, trên đó xẻ nhiều rãnh (còn gọi là đĩa), và 1
mạch cảm biến để phát xung
Số rãnh trên đĩa gọi là độ phân giải hay số xung của encoder. Đối với encoder có
độ phân giải thấp (dưới 200 xung) thì đĩa này là đĩa thép. Đối với các encoder có độ phân
giải cao, cỡ 1000 xung, thì đĩa này được làm bằng đĩa từ, encoder như vậy còn gọi là
encoder quang.
BKIT HARDWARE CLUB – www.bkit4u.com
60
Hướng dẫn sử dụng Kit 89
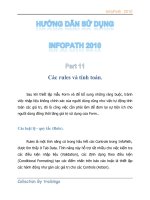
Tín hiệu trả về của encoder có 3 kênh A, B và Z. Thông thường ta sử dụng 2 kênh
A và B là đủ thông tin cho quãng đường và chiều quay của encoder. Tín hiệu trả về trên 2
kênh này như sau :
Như vậy nếu ta đưa tín hiệu A vào chân ngắt ngoài và cấu hình là ngắt
cạnh lên, thì khi tín hiệu B ở mức cao là chiều quay thuận của encoder, khi
B ở mức thấp là chiều quay ngược lại.
11.2 Kết nối phần cứng
Gạt switch 4 lên ON để kích hoạt led 7 đoạn.
Kết nối với encoder gồm 4 chân : VCC, GND, A và B vào board. Tín
hiệu A được nối vào P3.2 gây ra ngắt ngoài 0, tín hiệu B nối với P3.5
11.3 Viết chương trình
Chương trình gồm có 3 group : TIMER dùng
để quét led, hiển thị giá
trị encoder ra led 7 đoạn; EXT_INT dùng để cập nhật giá trị encoder mỗi khi
có ngắt ngoài 0 ở chân P3.2, MAIN chứa file main.c là chương trình chính
để chạy.
Chương trình trong bài này hoàn toàn tương tự như bài trước, đoạn
code trong hàm phục vụ ngắt ngoài sửa đổi lại như sau:
void ext0_isr() interrupt 0
{
if(P3 & (1 << 5))
pulse ++;
else
pulse ;
}
Biến pulse được khai báo là unsigned int, dùng để lưu trữ giá trị của
encoder.
BKIT HARDWARE CLUB – www.bkit4u.com
61
Hướng dẫn sử dụng Kit 89
Để xuất giá trị encoder ra led 7 đoạn, ta thêm 2 dòng lệnh sau trong
hàm phục vụ ngắt timer 0:
set_position(2);
put_number(pulse);
Hàm main() chỉ đơn giản là khởi tạo các thông số cần thiết và sau đó loop vô tận.
Tất cả mọi công việc sẽ do các hàm phục vụ ngắt quãng thực hiện. Đây là 1 mô hình lập
trình cơ bản của vi điều khiển trong các ứng dụng thực tế. Chi tiết code các bạn xem thêm
trong thư mục Bài 11.
BKIT HARDWARE CLUB – www.bkit4u.com
62