nghiên cứu điều khhiển giám sát các thiết bị trong trạm viễn thông qua mạng truyền thông
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.23 MB, 89 trang )
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
ĐẠI HỌC THÁI NGUYÊN
TRƢỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
TRẦN PHI SƠN
NGHIÊN CỨU ĐIỀU KHIỂN GIÁM SÁT
CÁC THIẾT BỊ TRONG TRẠM VIỄN THÔNG
QUA MẠNG TRUYỀN THÔNG
LUẬN VĂN THẠC SỸ KỸ THUẬT
THÁI NGUYÊN 2010
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
ĐẠI HỌC THÁI NGUYÊN
TRƢỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
LUẬN VĂN THẠC SỸ KỸ THUẬT
Đề tài:
NGHIÊN CỨU ĐIỀU KHIỂN GIÁM SÁT
CÁC THIẾT BỊ TRONG TRẠM VIỄN THÔNG
QUA MẠNG TRUYỀN THÔNG
Ngành: KỸ THUẬT ĐIỆN TỬ
Mã số: 60 52 70
Học viên: Trần Phi Sơn
Ngƣời hƣớng dẫn Khoa học: PGS.TS. Nguyễn Như Hiển
Ngày giao đề tài: 20 - 01 - 2010
Ngày hoàn thàn đề tài: 30 - 8 - 2010
NGƢỜI HƢỚNG DẪN KHOA HỌC
PGS.TS. Nguyễn Nhƣ Hiển
HỌC VIÊN
Trần Phi Sơn
BAN GIÁM HIỆU
KHOA SAU ĐẠI HỌC
THÁI NGUYÊN 2010
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 1 -
MỤC LỤC
.
Mục lục 1
Danh mục các hình vẽ 3
MỞ ĐẦU 5
Chƣơng 1. TỔNG QUAN VỀ ĐIỀU KHIỂN GIÁM SÁT CÁC THIẾT BỊ
TRONG TRẠM VIỄN THÔNG 7
1.1. Khái quát về điều khiển Logic lập trình PLC 7
1.1.1. Định nghĩa về hệ thống điều khiển 7
1.1.2. Vai trò của bộ điều khiển lập trình PLC 8
1.1.3. Khái niệm về PLC 8
1.1.4. Sơ lược về lịch sử phát triển 11
1.1.5. Đặc điểm bộ điều khiển lập trình 12
1.1.6. Ưu điểm của PLC 13
1.1.7. Ứng dụng của PLC 16
1.2. Sơ lược về mạng truyền thông với PLC 18
1.2.1. Định nghĩa về mạng truyền thông công nghiệp 18
1.2.2. Vai trò ứng dụng của mạng truyền thông 19
1.2.3. Mạng ASI 20
1.2.4. Mạng PROFIBUS 23
1.2.5. Mạng ETHERNET công nghiệp 26
1.2.6. Các mạng máy tính thông dụng 27
Chƣơng 2. CÁC GIẢI PHÁP XÂY DỰNG HỆ THỐNG ĐIỀU KHIỂN
GIÁM SÁT TRẠM VIỄN THÔNG QUA MẠNG TRUYỀN
THÔNG… 35
2.1. Yêu cầu chung đối với hệ thống 35
2.2. Sơ đồ khối của hệ thống 36
2.2.1. Trung tâm giám sát 36
2.2.2. Các trạm viễn thông (Trạm vệ tinh) 37
2.3. Chức năng và mục tiêu của hệ thống giám sát 38
2.3.1. Thu thập dữ liệu 38
2.3.2. Cảnh báo 39
2.3.3. Điều khiển 40
2.3.4. Cấu hình các tham số hệ thống 40
2.3.5. Khả năng quản trị hệ thống 41
2.3.6. Khả năng lưu trữ 42
2.3.7. Khả năng bảo mật 42
2.3.8. Quản trị hệ thống và phân quyền người sử dụng 42
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 2 -
Chƣơng 3. GIẢI PHÁP ĐỀ XUẤT THỰC HIỆN XÂY DỰNG HỆ
THỐNG 43
3.1. Tổng quan thiết kế 43
3.2. Lựa chọn giải pháp chi tiết 45
3.2.1. Thiết bị giám sát và điều khiển MCE 45
3.2.2. Các cảm biến và thiết bị kết nối với PLC 51
3.2.3. Đặc tính kỹ thuật của một số thiết bị chính 56
3.3. Cấu hình kỹ thuật 58
3.4. Các tính năng cơ bản 59
3.4.1. Giám sát mất đường truyền 59
3.4.2. Giám sát cảnh báo, trạng thái 59
3.4.3. Đo đạc các thông số từ xa 59
3.4.4. Điều khiển tự động 59
3.4.5. Điều khiển từ xa 59
3.4.6. Chức năng tra cứu lý lịch sự kiện 59
3.5. Thiết kế tủ điều khiển Logic 60
3.5.1. Chọn sử dụng PLC 60
3.5.2. Kết nối PLC và mạng Internet 62
3.5.3. Lập trình cho PLC 63
3.6. Phương án xây dựng phần mềm tích hợp giám sát điều khiển từ xa
(SCADA - Supervisory Control And Data Acquisition) 80
3.6.1. Cơ sở thiết kế hệ thống 80
3.6.2. Giải pháp xây dựng phần mềm hệ thống 81
3.6.3. Một số giao diện của phần mềm giám sát 83
Chƣơng 4. KẾT LUẬN VÀ KIẾN NGHỊ 86
4.1. Kết luận 86
4.1.1. Lợi ích đem lại từ hệ thống 82
4.1.1. Kết quả đạt được sau quá trình nghiên cứu và thiết kế 86
4.2. Kiến nghị 86
4.2.1. Các kiến nghị 86
4.2.2. Hướng phát triển 87
Tài liệu tham khảo 88
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 3 -
DANH MỤC CÁC HÌNH VẼ
Hình 1.1. Hệ thống điều khiển bằng PLC 7
Hình 1.2. Sơ đồ cấu trúc của bộ điều khiển lập trình 9
Hình 1.3. Mô tả hoạt động PLC 10
Hình 1.4. Chu kỳ vòng quét của PLC 10
Hình 1.5. Bảng điều khiển bằng PLC 14
Hình 1.6. Hình ảnh ứng dụng của PLC 17
Hình 1.7. Phân cấp mạng 20
Hình 1.8. Sơ đồ kết nối các thành phần AS – i 21
Hình 1.9. ASI Master CP 342-2 22
Hình 1.10. Truyền thông S7 qua mạng Ethernet 26
Hình 1.11. Cấu hình mạng LAN 28
Hình 1.12. Các tầng của TCP/IP so với 7 tầng tương ứng của 30
Hình 1.13. Hai mạng Net 1 và Net 2 kết nối thông qua routerR 33
Hình 1.14. Ba mạng kết nối với nhau thông qua 2 bộ định tuyến 33
Hình 1.15. Kiến trúc tổng thể của Internet 34
Hình 2.1. Mô hình tổng thể của hệ thống điều khiển giám sát trạm viễn thông36
Hình 2.2. Mô hình hệ thống điều khiển giám sát qua mạng IP 38
Hình 3.1. Mô hình thiết kế tổng quan 43
Hình 3.2. Sơ đồ mô tả thiết bị PLC 46
Hình 3.3. Nguyên tắc đấu nối các cổng DI 47
Hình 3.4. Nguyên tắc đấu nối tiếp, song song các cổng DI 47
Hình 3.5. Đặc tuyến chuyển đổi tuyến tính các cổng AI 48
Hình 3.6. Gửi điện áp điều khiển Vdk đến thiết bị 48
Hình 3.7. Mô tả giao thức MC-P 49
Hình 3.8. Vị trí của ATS 52
Hình 3.9. Sơ đồ mô tả khả năng dự phòng và chuyển đổi giữa 2 chế độ Auto và
Remote 52
Hình 3.10. Mặt máy tủ ATS 53
Hình 3.11. Đầu đo nhiệt độ Dixell 55
Hình 3.12. Đầu báo khói, Đầu báo nhiệt gia tăng 55
Hình 3.13. Các giao tiếp điện điều khiển ATS 57
Hình 3.14. Cấu hình kỹ thuật hệ thống 58
Hình 3.15. PLC S7 - 300 60
Hình 3.16. Module giao tiếp eWON 62
Hình 3.17. Kết nối PLC S7-300 với mạng Internet qua module eWON 62
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 4 -
Hình 3.18. Phân cấp hệ SCADA 80
Hình 3.19. Mô hình IMS Client - Server 81
Hình 3.20. Giao diện giám sát tổng thể 83
Hình 3.21. Quản lý ngưỡng các loại cảnh báo 83
Hình 3.22. Giám sát cảnh báo qua màu sắc trên sơ đồ mặt bằng 84
Hình 3.23. Giao diện giám sát và điều khiển cho từng thiết bị 84
Hình 3.24. Giao diện giám sát và điều khiển trên sơ đồ mặt máy của PLC 85
Hình 3.25. Các lưu đồ điều khiển tự động cho 1 trạm 85
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 5 -
MỞ ĐẦU
Hiện nay đa số ở các đơn vị cung cấp và khai thác dịch vụ viễn thông vẫn
tồn tại phương pháp quản lý, khai thác dịch vụ truyền thống thủ công và không
đồng bộ. Chưa thực sự tự động hoá được các khâu quản lý, giám sát điều hành
và đánh giá chất lượng mạng và dịch vụ cho toàn hệ thống gây ra sự tốn kém
rất nhiều về nhân lực và vật lực; chậm trễ trong thông tin báo cáo giải quyết sự
cố và hỗ trợ khách hàng, thông tin báo cáo hỗ trợ các cấp lãnh đạo ra quyết
định chỉ đạo điều hành. Chính vì vậy cần phải có một hệ thống điều khiển giám
sát các thiết bị trong trạm viễn thông nhằm khắc phục được những tồn tại nói
trên.
Trong thời gian vừa qua, ngành công nghệ thông tin truyền thông nói
chung và ngành viễn thông nói riêng đã có những bước phát triển vô cùng
mạnh mẽ. Đã có rất nhiều trạm viễn thông, BTS được xây dựng với các trang
thiết bị hiện đại đắt tiền nhằm phục vụ cho nhu cầu không ngừng tăng cao của
các khách hàng. Sự tốn kém, phức tạp trong việc giải quyết hậu quả cũng như
những chi phí, mất mát không lường trước được có thể xảy ra mỗi khi các thiết
bị nhà trạm viễn thông xảy ra sự cố dẫn đến nhu cầu phải có sự giám sát nhà
trạm viễn thông một cách liên tục, tin cậy và hiệu quả.
Tuy nhiên, hiện nay tại hầu hết các trạm viễn thông, đều mới chỉ có một số
rất ít các cảnh báo giản đơn cho một số ít thiết bị. Hơn nữa việc sử dụng các hệ
thống điều hoà, thông gió,… liên tục mà không quan tâm tới nhiệt độ nhà trạm
đã gây ra một sự thất thoát lớn về điện năng. Do đó một hệ thống giám sát mới
được trang bị đầy đủ các thiết bị với khả năng cảnh báo, giám sát toàn bộ trạm
viễn thông theo thời gian thực và có phương án sử dụng điện năng một cách
hiệu quả cần phải được xây dựng.
Số lượng không ngừng tăng lên của các trạm viễn thông đòi hỏi sự giám
sát đó phải được thực hiện theo hướng tập trung, tiện lợi và an toàn. Trong
tương lai, tất cả các trạm viễn thông hoạt động hoàn toàn tự động, các nhân
viên kỹ thuật có thể xử lý, giám sát các hoạt động của trạm từ xa. Chỉ trong
những trường hợp có sự cố nghiêm trọng thì các nhân viên kỹ thuật mới phải
đến tận nơi để xử lý.
Để nâng cao chất lượng dịch vụ và tối ưu hoá chi phí quản lý, tăng cường
việc kiểm soát an ninh đối với các nhà trạm thiết bị, còn phải có một giải pháp
giám sát quản lý nhà trạm tập trung từ xa, tự động hoá toàn bộ hoạt động của
các thiết bị phụ trợ để tăng tuổi thọ các thiết bị chính, giảm bớt nhân tố con
người trông coi, qua đó giảm được rất nhiều chi phí quản lý, và tận dụng được
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 6 -
nguồn nhân lực đó để phục vụ các nhu cầu khác. Có như vậy mới có thể tăng
sức mạnh cạnh tranh trong nền kinh từ mở cửa như hiện nay.
Xây dựng một hệ thống giám sát, quản lý tập trung không những tạo ra
khả năng quản lý phân vùng, phòng ngừa và xử lý các sự cố một cách chủ
động, từ xa,… mà còn giúp giảm thiểu những chi phí gây ra do sự lãng phí điện
năng.
Đối với các nước phương Tây, các hệ thống giám sát tự động từ xa cho
các nhà trạm thiết bị không người đã được sử dụng từ rất lâu trong tất cả các
lĩnh vực, trong khi ở Việt Nam, công nghệ này là tương đối mới mẻ.
Với đề tài “ Nghiên cứu điều khiển giám sát các thiết bị trong trạm viễn
thông qua mạng truyền thông”, phương án kỹ thuật có thể đáp ứng được công
việc giám sát quản lý tập trung từ xa đối với các nhà trạm thiết bị Viễn thông.
Tôi mong rằng trên cơ sở đó có thể xây dựng các hệ thống điều khiển, giám sát
với quy mô lớn hơn.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 7 -
Chƣơng 1
TỔNG QUAN VỀ ĐIỀU KHIỂN GIÁM SÁT CÁC THIẾT BỊ
TRONG TRẠM VIỄN THÔNG
1.1. KHÁI QUÁT VỀ ĐIỀU KHIỂN LOGIC LẬP TRÌNH PLC
1.1.1. Định nghĩa về hệ thống điều khiển
Nói chung, hệ thống điều khiển là tập hợp các máy móc và thiết bị điện tử
ở một nơi để đảm bảo họat động của quá trình sản xuất hay một hoạt động của
sản xuất ổn định, chính xác và nhịp nhàng.
Những thành tựu của sự tiến bộ vượt bậc của khoa học công nghệ, các
nhiệm vụ điều khiển phức tạp được hoàn thành nhờ một hệ thống điều khiển tự
động cao, đó chính là bộ điều khiển lập trình và có sự tham gia của cả máy tính.
Ngoài việc giao tiếp tín hiệu với các trường thiết bị vào – ra như (các bảng vận
hành, động cơ, cảm biến, van …), khả năng giao tiếp truyền thông dữ liệu trên
mạng giữa các thành phần điều khiển trong hệ thống cũng được thực hiện. Mỗi
thành phần đơn giản trong hệ thống điều khiển đều đóng một vai trò quan trọng
mà không cần quan tâm đến kích cỡ. Ví dụ hình 1.1 cho thấy rằng PLC không
biết điều gì xẩy ra xung quanh nó khi không có bất kỳ một thiết bị cảm nhận tín
hiệu. Nó cũng không thể thực hiện một chuyển động cơ học nếu không có nối
kết giữa động cơ với nó.
Hình 1.1. Hệ thống điều khiển bằng PLC
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 8 -
1.1.2. Vai trò của bộ điều khiển lập trình PLC
Trong một hệ thống tự động, nói chung PLC được ví như là con tim của
hệ thống điều khiển. Với chương trình ứng dụng điều khiển (được lưu trữ trong
bộ nhớ PLC) trong việc thực thi, PLC thường xuyên giám sát tình trạng hệ
thống qua tín hiệu phản hồi của thiết bị đầu và. Sau đó sẽ dựa vào sự hợp lý của
chương trình để xác định tiến trình hoạt động được thực hiện ở những thiết bị
xuất cần thiết.
PLC có thể được sử dụng điều khiển những nhiệm vụ đơn giản có tính
lặp đi lặp lại hoặc một vài nhiệm vụ cụ thể được liên kết cùng nhau với thiết bị
điều khiển chủ hoặc máy tính chủ khác qua một loại mạng giao tiếp để tích hợp
điều khiển của một quá trình phức tạp.
1.1.2.1. Thiết bị đầu vào
Sự thông minh của một hệ thống tự động phần lớn dựa vào khả năng của
PLC đọc được tín hiệu từ những loại cảm biến ttự động khác nhau và thiết bị
đầu vào cưỡng bức tín hiệu.
Những nút nhấn, bàn phím, công tắc gạt tạo thành cơ bản của giao tiếp
người và máy là các loại thiết bị vào cưỡng bức tín hiệu. Mặt khác, để phát hiện
vật thể, quan sát sự di chuyển cơ cấu, kiểm tra áp suất và mức chất lỏng và
nhiều sự kiện khác, PLC sẽ phải xử lý tín hiệu từ những thiết bị cảm ứng tự
động đặc biệt như công tắc tơ, công tắc hành trình, cảm biến quang điện, cảm
biến mức độ, và Nhiều loại tín hiệu vào PLC có thể là ON/OFF hay tương tự.
Những tín hiệu vào này được giao tiếp với PLC qua các loại môđun vào khác
nhau.
1.1.2.2. Thiết bị đầu ra
Hệ thống tự động không hoàn chỉnh và hệ thống PLC thật sự bị tê liệt
nếu không có giao tiếp với thiết bị ra, chẳng hạn một số thiết bị thông thường
như: động cơ, cuộn dây, đèn chỉ thị, chuông báo…Thông qua sự hoạt động của
động cơ và cuộn dây, PLC có thể điều khiển từ đơn giản đến phức tạp.
1.1.3. Khái niệm về PLC
PLC (Prgrammaple Logic Controller) là thiết bị điều khiển lập trình, được
thiết kế chuyên dùng trong công nghiệp để điều khiển các tiến trình xử lý từ
đơn giản đến phức tạp, tuỳ thuộc vào người điều khiển mà nó có thể thực hiện
một loạt các chương trình hoặc sự kiện, sự kiện này được kích hoạt bởi các tác
nhân kích thích (hay còn gọi là đầu vào) tác động vào PLC hoặc qua các bộ
định thời (Timer) hay các sự kiện được đếm qua bộ đếm. Khi một sự kiện được
kích hoạt nó sẽ bật ON, OFF hoặc phát một chuỗi xung ra các thiết bị bên ngoài
được gắn vào đầu ra của PLC là ta có thể thực hiện các chức năng khác nhau,
trong các môi trường điều khiển khác nhau.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 9 -
1.1.3.1. Cấu trúc
Một PLC bao gồm một bộ xử lý trung tâm, bộ nhớ để lưu trữ chương trình
ứng dụng và những môđun giao tiếp nhập – xuất. Hình 1.2 mô tả sơ bộ về cấu
trúc của một PLC.
1.1.3.2. Hoạt động của PLC
Về cơ bản, hoạt động của một PLC cũng khá đơn giản. Đầu tiên, hệ thống
các cổng vào/ra (Input/ Output) (còn gọi là các Module xuất/nhập) dùng để đưa
các tín hiệu từ các thiết bị ngoại vi vào CPU (như các sensor, contact, tín hiệu
từ động cơ…). Sau khi nhận được tín hiệu ở đầu vào thì CPU sẽ xử lý và đưa
các tín hiệu điều khiển qua môđun xuất ra các thiết bị được điều khiển. Hình
1.3 minh hoạ hoạt động của PLC khi thực thi chương trình ứng dụng.
Trong suốt quá trình hoạt động, CPU đọc hoặc quét (scan) dữ liệu hoặc
trạng thái của các thiết bị ngoại vi thông qua đầu vào, sau đó thực hiện các
chương trình trong bộ nhớ như sau: một bộ đệm chương trình sẽ nhận lệnh từ
bộ nhớ chương trình đưa ra thanh ghi lệnh để thi hành. Chương trình ở dạng
Hình 1.2. Sơ đồ cấu trúc của bộ điều khiển lập trình
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 10 -
STL (Statement List – Dạng lệnh liệt kê) hay ở dạng LADDER (dạng hình
thang) sẽ được dịch ra ngôn ngữ máy cất trong bộ nhớ chương trình. Sau khi
thực hiện xong chương trình, sau đó là truyền thông nội bộ và kiểm lỗi sau đó
CPU sẽ gửi hoặc cập nhật tín hiệu tới các thiết bị, được điều khiển thông qua
môđun xuất. Một chu kỳ gồm đọc tín hiệu ở đầu vào, thực hiện chương trình,
truyền thông nội bộ và tự kiểm tra lỗi và gửi cập nhật tín hiệu ở đầu ra được gọi
là một chu kỳ quét.
Như vậy thì thời điểm thực hiện lệnh vào/ra thì lệnh không xử lý trực tiếp
với cổng vào/ra mà sẽ xử lý thông qua bộ nhớ đệm. Nếu có sử dụng ngắt thì
chương trình còn tương ứng với từng tín hiệu ngắt sẽ được soạn thảo và cài đặt
như một bộ phận chương trình. Chương trình ngắt chỉ thực hiện trong vòng
quét khi xuất hiện tín hiệu ngắt và có thể xảy ra ở bất kỳ điểm nào trong vòng
quét. Chu kỳ quét ở một vòng của PLC được mô tả như hình 1.4.
Thực tế khi PLC thực hiện chương trình (Program Execution), PLC khi
cập nhật tín hiệu đầu vào (ON, OFF) phải theo hai bước; khi xử lý thực hiện
chương trình, vi xử lý sẽ chuyển đổi các mức logic tương ứng ở đầu ra trong
“chương trình nội” (đã được lập trình), các mức logic này sẽ chuyển đổi
ON/OFF. Tuy nhiên lúc này các tín hiệu ở đầu ra “thật” (tức tín hiệu được đưa
ra tại Module out) vẫn chưa được đưa ra. Khi xử lý kết thúc chương trình xử lý,
việc chuyển đổi các mức logic (của các tiếp điểm) đã hoàn thành thì việc cập
nhật các tín hiệu ở đầu ra mới thực sự tác động lên đầu ra để điều khiển các
thiết bị ở đầu ra.
Thường việc thực thi một vòng quét xảy ra với thời gian rất ngắn, một
vòng quét đơn (single scan) có thời gian thực hiện một vòng quét từ 1ms tới
100ms. Việc thực hiện một chu kỳ quét dài hay ngắn còn phụ thuộc vào tốc độ
xử lý lệnh, độ dài của chương trình và cả mức độ giao tiếp giữa PLC với các
Hình 1.3. Mô tả hoạt động PLC
Hình 1.4. Chu kỳ vòng quét của PLC
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 11 -
thiết bị ngoại vi (màn hình hiển thị…). Vi xử lý chỉ có đọc được tín hiệu ở đầu
vào chỉ khi nào tín hiệu này tác động với khoảng thời gian lớn hơn một chu kỳ
quét. Nếu thời gian tác động ở đầu vào nhỏ hơn một chu kỳ quét thì vi xử lý
xem như không có tín hiệu này. Tuy nhiên trong thực tế sản xuất, thường các
hệ thống chấp hành là các hệ thống cơ khí nên tốc độ quét như trên có thể đáp
ứng được các chức năng của dây chuyền sản xuất. Để khắc phục khoảng thời
gian quét dài, ảnh hưởng đến chu trình sản xuất, các nhà thiết kế còn thiết kế hệ
thống PLC cập nhật tức thời, dùng bộ đếm tốc độ cao (High Speed Counter)
các hệ thống này thường được áp dụng cho các PLC lớn có số lượng I/O nhiều,
truy cập và xử lý lượng thông tin lớn.
1.1.4. Sơ lƣợc về lịch sử phát triển
Sự phát triển của kỹ thuật điều khiển tự động hiện đại và công nghệ điều
khiển logic khả trình dựa trên cơ sở phát triển của tin học mà cụ thể là sự phát
triển của kỹ thuật máy tính.
Kỹ thuật điều khiển logic khả trình PLC (Programmable Logic Control)
được phát triển từ những năm 1968 -1970. Trong gia đoạn đầu các thiết bị khả
trình yêu cầu người sử dụng phải có kỹ thuật điện tử, phải có trình độ cao.
Ngày nay các thiết bị PLC được phát triển mạnh mẽ và có mức độ phổ cập cao.
Thiết bị điều khiển logic lập trình được PLC là dạng thiết bị điều khiển
đặc biệt dựa trên bộ vi xử lý, sử dụng bộ nhớ lập trình được để lưu trữ các lệnh
và thực hiện các chức năng, chẳng hạn, cho phép tính logic, lập chuỗi, định giờ,
đếm, và các thuật toán để điều khiển máy và các quá trình công nghệ. PLC
được thiết kế cho các kỹ sư, không yêu cầu cao kiến thức về máy tính và ngôn
ngữ máy tính, có thể vận hành. Chúng được thiết kế cho không chỉ các nhà lập
trình máy tính mới có thể cài đặt hoặc thay đổi chương trình. Vì vậy, các nhà
thiết kế PLC phải lập trình sẵn sao cho chương trình điều khiển có thể nhập
bằng cách sử dụng ngôn ngữ đơn giản (ngôn ngữ điều khiển). Thuật ngữ logic
được sử dụng vì việc lập trình chủ yếu liên quan đến các hoạt động logic ví dụ
nếu có các điều kiện A và B thì C làm việc Người vận hành nhập chương
trình (chuỗi lệnh) vào bộ nhớ PLC. Thiết bị điều khiển PLC sẽ giám sát các tín
hiệu vào và các tín hiệu ra theo chương trình này và thực hiện các quy tắc điều
khiển đã được lập trình.
Các PLC tương tự máy tính, nhưng máy tính được tối ưu hoá cho các tác
vụ tính toán và hiển thị, còn PLC được chuyên biệt cho các tác vụ điều khiển
và môi trường công nghiệp. Vì vậy các PLC:
+ Được thiết kế bền để chịu được rung động, nhiệt, ẩm và tiếng ồn.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 12 -
+ Có sẵn giao diện cho các thiết bị vào ra.
+ Được lập trình dễ dàng với ngôn ngữ điều khiển dễ hiểu, chủ yếu giải
quyết các phép toán logic và chuyển mạch.
Về cơ bản chức năng của bộ điều khiển logic PLC cũng giống như chức
năng của bộ điều khiển thiết kế trên cơ sở các rơle công tắc tơ hoặc trên cơ sở
các khối điện tử đó là:
+ Thu thập các tín hiệu vào và các tín hiệu phản hồi từ các cảm biến.
+ Liên kết, ghép nối các tín hiệu theo yêu cầu điều khiển và thực hiện
đóng mở các mạch phù hợp với công nghệ.
+ Tính toán và soạn thảo các lệnh điều khiển trên cơ sở so sánh các thông
tin thu thập được.
+ Phân phát các lệnh điều khiển đến các địa chỉ thích hợp.
Riêng đối với máy công cụ và người máy công nghiệp thì bộ PLC có thể
liên kết với bộ điều khiển số NC hoặc CNC hình thành bộ điều khiển thích
nghi.
Trong hệ thống trung tâm gia công, mỗi quy trình công nghệ đều được bộ
PLC điều khiển tập trung.
1.1.5. Đặc điểm bộ điều khiển lập trình
Nhu cầu về một bộ phận điều khiển dễ sử dụng, linh hoạt và có giá thành
thấp đã thúc đẩy sự phát triển những hệ thống điều khiển lập trình
(programmable-control systems) – hệ thống sử dụng CPU và bộ nhớ để điều
khiển máy móc hay quá trình hoạt động. Trong bối cảnh đó, bộ điều khiển lập
trình (PLC – Programmable Logic Controller) được thiết kế nhằm thay thế
phương pháp điều khiển truyền thống dùng rơ - le và thiết bị rời cồng kềnh, và
nó tạo ra một khả năng điều khiển thiết bị dễ dàng và linh hoạt dựa trên việc lập
trình trên các lệnh logic cơ bản. Ngoài ra, PLC còn có thể thực hiện những tác
vị khác như định thì, đếm, v.v…, làm tăng khả năng điều khiển cho những hoạt
động phức tạp, ngay cả với loại PLC nhỏ nhất. Hoạt động của PLC là kiểm tra
tất cả các trạng thái tín hiệu ở đầu vào, đưa được về từ quá trình điều khiển,
thực hiện logic được lập trong chương trình và kích ra tín hiệu điều khiển cho
thiết bị bên ngoài tương ứng. Với các mạch giao tiếp chuẩn ở khối vào và khối
ra của PLC cho phép nó kết nối trực tiếp đến những cơ cấu tác động (actuaors)
có công suất nhỏ ở đầu ra và những mạch chuyển đổi tín hiệu (transducers) ở
đầu vào, mà không cần có các mạch giao tiếp hay rơ-le trung gian. Tuy nhiên,
cần phải có mạch điện tử công suất trung gian khi PLC điều khiển những thiết
bị có công suất lớn.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 13 -
Việc sử dụng PLC cho phép chúng ta hiệu chỉnh hệ thống điều khiển mà
không cần có sự thay đổi nào về mặt kết nối dây, sự thay đổi chỉ là thay đổi
chương trình điều khiển trong bộ nhớ thông qua thiết bị lập trình chuyên dùng.
Hơn nữa, chúng còn có ưu điểm là thời gian lắp đặt và đưa vào hoạt động
nhanh hơn so với những hệ thống điều khiển truyền thống mà đòi hỏi cần phải
thực hiện việc nối dây phức tạp giữa các thiết bị rời.
Về phần cứng, PLC tương tự như máy tính “truyền thống”, và chúng có
các đặc điểm thích hợp cho mục đích điều khiển trong công nghiệp.
- Khả năng chống nhiễu tốt.
- Cấu trúc dạng môđun cho phép dễ dàng thay thế, tăng khả năng (nối
thêm module mở rộng vào/ra) và thêm chức năng (nối thêm module chuyên
dùng).
- Việc kết nối dây và mức điện áp tín hiệu ở đầu vào và đầu ra được chuẩn
hoá.
- Ngôn ngữ lập trình chuyên dùng – ladder, instruction và function chart –
dễ hiểu và dễ sử dụng.
- Thay đổi chương trình điều khiển dễ dàng.
Những đặc điểm trên làm cho PLC được sử dụng nhiều trong việc điều
khiển các máy móc công nghiệp và trong điều khiển quá trình.
1.1.6. Ƣu điểm của PLC
1.1.6.1. Hệ thống điều khiển cổ điển và những khó khăn của nó
Như đã đề cập ở phần lịch sử và hình thành PLC, đó là sự bắt đầu cuộc
cách mạng công nghiệp, đặc biệt vào những năm 1960 & 1970, những máy
móc tự động được điều khiển bằng những rơ – le cơ điện. Những rơ – le này
được lắp đặt cố định bên trong bảng điều khiển. Trong một vài trường hợp,
bảng điều khiển là quá rộng chiếm không gian. Mọi kết nối ở ngõ rơ – le phải
được thực hiện. Đi dây điện thường không hoàn hảo, nó phải mất nhiều thời
gian vì những rắc rối hệ thống và đây là vấn đề rất tốn thời gian đối với nhà sử
dụng. Hơn nữa các rơ – le bị hạn chế về tiếp điểm. Nếu khi có yêu cầu hiệu
chỉnh hay cải tiến thì máy phải ngừng hoạt động, không gian lắp đặt bị giới
hạn, và nối dây phải được làm dấu để phù hợp những thay đổi. Bảng điều khiển
chỉ có thể được sử dụng cho những quá trình riêng biệt nào đó không đòi hỏi
thay đổi ngay thành hệ thống mới. Trong quá trình bảo trì, các kỹ thuật viên
điện phải được huấn luyện tốt và giỏi trong việc giải quyết những sự cố của hệ
thống điều khiển. Nói tóm lại, bảng điều khiển rơ – le cổ điển là rất kém linh
hoạt và không thể thay thế được.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 14 -
Những bất lợi của bảng điều khiển cổ điển:
- Có quá nhiều dây trong bảng điều khiển.
- Sự thay đổi hoàn toàn khó khăn.
- Việc sửa chữa vô cùng phiền phức vì bạn phải cần đến nhà kỹ thuật giỏi.
- Tiêu thụ điện năng lớn khi cuộn dây của rơ – le tiêu thụ điện.
- Thời gian dừng máy là quá dài khi sự cố xảy ra, vì phải mất một thời
gian dài để sửa chữa bảng điều khiển.
- Nó gây ra thời gian dừng máy lâu hơn khi bảo trì và điều chỉnh khi các
bản vẽ không còn nguyên vẹn qua thời gian nhiều năm.
1.1.6.2. Bảng điều khiển khả lập trình và những thuận lợi của nó
Với sự xuất hiện của bộ điều khiển khả lập trình, những quan điểm và
thiết kế điều khiển tiến bộ to lớn. Có nhiều ích lợi trong việc sử dụng bộ điều
khiển lập trình.
Ví dụ bảng điều khiển PLC được thể hiện hình 1.5.
Cùng với sự phát triển của phần cứng
và phần mềm, PLC ngày càng tăng được các
tính năng cũng như lợi ích của PLC trong
hoạt động công nghiệp.
- Hệ thống dây giảm đến 80% so với hệ
thống điều khiển rơ – le.
- Điện năng tiêu thụ giảm đáng kể vì
PLC tiêu thụ ít điện năng.
- Chức năng tự chẩn đoán của PLC cho
phép sửa chữa dễ dàng và nhanh chóng nhờ
tính năng giám sát giữa người và máy
(HMI).
- Kích thước của PLC hiện nay được thu nhỏ lại để bộ nhớ và số lượng
I/O càng nhiều hơn, các ứng dụng của PLC càng mạnh hơn giúp người sử dụng
giải quyết được nhiều vấn đề phức tạp trong điều khiển hệ thống.
- Chỉ cần lắp đặt một lần (đối với sơ đồ hệ thống, các đường nối dây, các
tín hiệu ở đầu vào/ra…), mà không phải thay đổi kết cấu của hệ thống sau này,
giảm được sự tốn kém khi phải thay đổi lắp đặt khi đổi thứ tự điều khiển (đối
với hệ thống điều khiển Relay), khả năng chuyển đổi hệ điều khiển cao hơn
(như giao tiếp giữa các PLC để truyền dữ liệu điều khiển lẫn nhau), hệ thống
được điều khiển linh hoạt hơn.
Hình 1.5. Bảng điều khiển
bằng PLC
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 15 -
- Độ tin cậy cao vì PLC được thiết kế đặc biệt để hoạt động trong môi
trường công nghiệp. Một PLC có thể được lắp đặt ở những nơi có độ nhiễu
điện cao (Electrical Noise), vùng có từ trường mạnh, có các chấn động cơ khí,
nhiệt động và độ ẩm môi trường cao…
- Khả năng quyền lực mà PLC thực hiện được đó là sự phối hợp giữa các
thiết điều khiển, giám sát và truyền thông tạo ra một mạng sản xuất toàn cầu:
giám sát, điều khiển và thu thập dữ liệu (SCADA).
Bảng 1 dưới đây mô tả so sánh sơ bộ về các hệ điều khiển: Rơle - Mạch số
- Máy tính và PLC.
Bảng 1: So sánh đặc tính kỹ thuật giữa những hệ thống điều khiển
Chỉ tiêu so sánh
Rơ - le
Mạch số
Máy tính
PLC
Giá thành từng
chức năng
Khá thấp
Thấp
Cao
Thấp
Kích thước vật lý
Lớn
Rất gọn
Khá gọn
Rất gọn
Tốc độ điều
khiển
Chậm
Rất nhanh
Khá nhanh
Nhanh
Khả năng chống
nhiễu
Xuất sắc
Tốt
Khá tốt
Tốt
Lắp đặt
Mất thời
gian thiết kế
và lắp đặt
Mất thời
gian thiết kế
Mất nhiều
thời gian lập
trình
Lập trình và
lắp đặt đơn
giản
Khả năng điều
khiển tác vụ phức
tạp
Không
Có
Có
Có
Dễ thay đổi điều
khiển
Rất khó
Khó
Khá đơn
giản
Rất đơn giản
Công tác bảo trì
Kém – Có
rất nhiều
công tắc
Kém – Nếu
IC được hàn
Kém – Có
rất nhiều
mạch điện tử
chuyên dùng
Tốt – các
modul được
tiêu chuẩn
hoá
Theo bảng so sánh, PLC có những đặc điểm về phần cứng và phần mềm
làm cho nó trở thành bộ điều khiển công nghiệp được sử dụng rộng rãi.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 16 -
1.1.7. Ứng dụng của PLC
Hiện nay PLC đã được ứng dụng thành công trong nhiều lĩnh vực sản xuất
cả trong công nghiệp và dân dụng. Từ những ứng dụng để điều khiển các hệ
thống đơn giản, chỉ có chức năng đóng/mở (ON/OFF) thông thường đến các
ứng dụng cho các lĩnh vực phức tạp, đòi hỏi tính chính xác cao, ứng dụng các
thuật toán trong quá trình sản xuất. Các lĩnh vực tiêu biểu ứng dụng PLC hiện
nay bao gồm:
- Phân tích vật liệu.
- Hệ thống chuyền tải.
- Máy đóng gói.
- Điều khiển robot gắp và xếp
hàng.
- Điều khiển bơm.
- Xử lý nước.
- Thiết bị xử lý hoá chất.
- Công nghiệp giấy và bột giấy.
- Sản xuất thuỷ tinh.
- Công nghiệp đúc bê tông.
- Sản xuất xi măng.
- Công nghiệp in ấn.
- Xử lý thực phẩm.
- Máy công cụ.
- Công nghiệp thuốc lá.
- Máy CNC.
- Máy sản xuất vật liệu bán dẫn.
- Thiết bị sản xuất đường.
- Thiết bị sản xuất dầu cọ.
- Ngành năng lượng.
- Máy rút tiền tự động.
- Điều khiển máy lạnh.
- Thiết bị sản xuất ra tivi.
- Trạm điện.
- Điều khiển chế độ xử lý.
- Sản xuất thiết bị điện.
- Hệ thống điều khiển giao thông.
- Hệ thống điều khiển ga xe lửa.
- Công nghiệp sản xuất nhựa.
- Công nghiệp sản xuất cơ khí.
- Sản xuất xe hơi.
- Nhà máy sản xuất sắt, thép.
- Tòa nhà tự động.
- Sản xuất vỏ xe.
- Sản xuất vi mạch.
- Thiết bị gia công cống rãnh.
- Hệ thống điều khiển tin cậy.
- Hệ thống điều khiển nâng
chuyển.
- Hệ thống điều khiển máy phát
điện.
- Điều khiển khu vui chơi…
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 17 -
Một số hình ảnh về các lĩnh vực sản xuất sử dụng PLC
Hệ thống khử mùi
Khởi động mềm động cơ
Giám sát hệ thống
Điều khiển thang máy
Điều khiển quá tải hệ thống điện
Điều khiển thời gian cửa, đèn
Hình 1.6. Hình ảnh ứng dụng của PLC
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 18 -
1.2. SƠ LƢỢC VỀ MẠNG TRUYỀN THÔNG VỚI PLC
1.2.1. Định nghĩa về mạng truyền thông công nghiệp
Sự phổ biến của các giải pháp tự động hoá sử dụng hệ thống truyền thông
số là kết quả tổng hợp của các tiến bộ trong kỹ thuật vi điện tử, kỹ thuật máy
tính, kỹ thuật thông tin và kỹ thuật tự động hoá. Mạng truyền thông công
nghiệp hay mạng công nghiệp phổ biến hiện nay cho phép liên kết mạng ở
nhiều mức khác nhau, từ các bộ cảm biến, cơ cấu chấp hành dưới mức trường
cho đến các máy tính điều khiển, quản lý công ty. Về cơ sở kỹ thuật, mạng
công nghiệp và các hệ thống mạng viễn thông có nhiều điểm tương đồng, tuy
nhiên cũng có những điểm khác biệt sau:
- Mạng viễn thông có hành vi địa lý và số lượng thành viên tham gia lớn
nên các yêu cầu kỹ thuật (cấu trúc mạng, tốc độ truyền thông, tính năng thời
gian thực,…) rất khác, cũng như phương pháp truyền thông (truyền dải rộng/
dải cơ sở, điều biên, dồn kênh, chuyển mạch,…) thường phức tạp hơn so với mạng
công nghiệp.
- Đối tượng của mạng viễn thông bao gồm cả con người và thiết bị kỹ
thuật, trong đó có con người đóng vai trò chủ yếu. Vì vậy các dạng thông tin
cần trao đổi bao gồm cả tiếng nói, hình ảnh, văn bản và dữ liệu.
- Đối với mạng công nghiệp thuần tuý là các thiết bị công nghiệp, nên
dạng thông tin quan tâm duy nhất là dữ liệu. Kỹ thuật truyền dữ liệu theo chế
độ bit nối tiếp là đặc trưng của mạng công nghiệp.
Mạng truyền thông công nghiệp thực chất là một dạng đặc biệt của mạng
máy tính, có thể so sánh với mạng máy tính thông thường ở những điểm giống
nhau và khác nhau như sau:
- Kỹ thuật truyền thông số hay truyền dữ liệu là đặc trưng chung.
- Mạng máy tính sử dụng trong công nghiệp được coi một phần (ở các cấp
điều khiển giám sát, điều hành sản xuất và quản lý công ty) trong mô hình phân
cấp của mạng máy tính thường coi đòi hỏi cao hơn về bảo mật thông tin.
- Mạng máy tính có phạm vi trải rộng khác nhau, ví dụ có thể nhỏ như
mạng LAN cho một nhóm vài máy tính, hoặc rất lớn như mạng Internet. Trong
nhiều trường hợp, mạng máy tính gián tiếp sử dụng dịch vụ truyền dữ liệu của
mạng viễn thông. Trong khi đó, cho đến nay các hệ thống mạng công nghiệp
thường có tính chất độc lập, phạm vi hoạt động tương đối hẹp.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 19 -
1.2.2. Vai trò ứng dụng của mạng truyền thông
Trong những năm gần đây bộ điều khiển lập trình PLC được sử dụng ngày
càng rộng rãi trong công nghiệp, là giải pháp lý tưởng cho việc tự động hoá các
quá trình sản xuất.
PLC đóng vai trò trung tâm điều khiển, dễ dàng lập trình, cho phép nhanh
chóng thay đổi chương trình điều khiển, ứng dụng trong phạm vi rộng, chuẩn
hoá được điều khiển, giá thành thấp và dễ dàng trong bảo trì sửa chữa, độ chính
xác cao trong môi trường công nghiệp.
Tuy có nhiều ưu điểm về điều kiện nhưng PLC không đáp ứng được về
phương diện quản lý, thông tin và lưu trữ dữ liệu. Vì vậy để đáp ứng những yêu
cầu này PLC thực hiện truyền thông nối mạng ở nhiều cấp độ khác nhau nhằm
đáp ứng yêu cầu vừa điều khiển vừa giám sát hệ thống.
Hệ thống mạng hỗ trợ những nhà quản lý những người chịu trách nhiệm
sản xuất theo dõi được tình hình cụ thể quá trình sản xuất mà không cần trực
tiếp trong khu vực sản xuất.
Mạng thu nhận dữ liệu trên tất cả các dây truyền sản xuất mà không làm
chậm lại quá trình sản xuất, thu thập dữ liệu để phân tích quá trình sản xuất,
chẩn đoán, giám sát sự cố và độ tin cậy trong hoạt động của các thiết bị, quản
lý nguyên liệu và lưu vào hệ thống kế hoạch sản xuất của nhà máy.
Mạng làm tăng thêm tính sẵn sàng của các thiết bị nối mạng. Mạng thực
thi thời báo phản ứng nhanh với mức cao ổn định tránh những mức thấp hay
thay đổi khi thực hiện truyền thông. Thao tác mạng linh hoạt để điều khiển đảm
bảo cho sự sản xuất liên tiếp. Tính liên tục không gián đoạn và sẵn sàng đang
dần trở thành điều quan trọng và ngày càng tăng.
Chi phí thời gian cho việc ngừng quá trình sản xuất để phát hiện và sửa
chữa sự cố thì cơ hơn chi phí cho sự lắp đặt những hệ thống cảnh báo, theo dõi,
giám sát, kịp thời phát hiện ra những sự cố để sửa chữa và tiếp tục sản xuất một
cách nhanh chóng và công cụ để làm điều này không khác hơn là sử dụng hệ
thống mạng truyền thông mạnh để định vị và chỉ báo lỗi một cách nhanh chóng.
Cùng với sự phát triển mạng toàn cầu, những nhà quản lý hoàn toàn có thể
theo dõi tinh hình hoạt động của nhà máy và có thể đưa ra những quyết định
thay đổi trong sản xuất và quyết định sẽ được thực thi nhanh chóng, dù người
quản lý đang ở bất cứ địa điểm nào, ở bất cứ một nước nào, thông qua việc kết
nối mạng đã đem lại một cuộc đột phá mạnh mẽ trong công nghiệp và cả trong
đời sống, trong khi sự hợp tác toàn cầu được nhắc đến những nhu cầu của con
người ngày càng đòi hỏi tốt hơn thì hệ thống mạng đã áp ứng được tương đối
những yêu cầu này.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 20 -
1.2.3. Mạng ASI
1.2.3.1. Giao tiếp AS
a. Tổng quan:
Mạng AS – I là hệ thống kết nối ở cấo thấp nhất trong hệ thống tự động
hoá (hình I.7), ở đây các đười nối kết thiết bị rườm rà, đổ xộ được thay thế
bằng tuyến cáp đơn giản gọi là cáp AS – i. Sử dụng cáp và điều khiển AS – I,
thì các cảm biến và các cơ cấu chấp hành kiểu nhị phân đơn giản nhất sẽ được
kết nối tới nhiều thiết bị điều khiển ở cấp trường qua các module AS – I.
Mạng AS được phân biệt bằng những đặc tính chủ yếu sau:
- Giao tiếp AS được
tối ưu để nối kết các cảm
biến và cơ cấu chấp hành.
Cáp AS được sử dụng cho
cả hai việc: Trao đổi dự
liệu giữa các cảm biến và
cơ cấu với thiết bị điều
khiển; cung cấp nguồn
cho các cảm biến.
- Nối kết đơn giản và
giá phải chăng: Lắp đặt
đơn giản, tính linh hoạt
cao với nối kết kiểu hình
cây.
- Thời gian đáp ứng nhanh: Chủ AS – I chỉ cần tối đa 5 ms cho chu kỳ
trao đổi dữ liệu lên tới 31 trạm.
- Các trạm trên cáo AS – I có thể là các cảm biến, cơ cấu chấp hành với
đầu nối hoặc module AS – I tích hợp có thể được nối vào tới 4 sensor/actuator
nhị phân thông thường.
- Với các molule AS – I có thể lên đến 124 cảm biến được hoạt động trên
cáp AS – i.
b. Giao tiếp AS và các thành phần hệ thống AS:
Các thành phần dưới sẽ tạo thành hệ thống mạng AS.
- AS – i master.
- AS – i module.
- AS – i cable.
Hình 1.7. Phân cấp mạng
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 21 -
- AS – i power supply unit.
- Sensors/actua tors with an integrated AS – i chip.
- Addressing unit.
- SCOPE AS – Interface.
Sơ đồ sau mô tả các thành phần được nối kết, hình 1.8.
1.2.3.2. Các AS – I master
a. ASI master cho Simatic S7-200:
CP 242-2.
Mudule CP 242-2 cho phép kết nối chuỗi ASI tới bộ điều khiển lập trình
S7 – 200. CP 242 – 2 có thể xử lý các chứ năng hoàn chỉnh của các điều ASI
master.
CP 242 – 8.
Mudule này không chỉ có ác chức năng của CP 242-2 mà còn có nối kết
tới PROFIBUS DP (DP slave). Mudule này cho nối kết S7-200 tới PROFIBUS
DP và ASI cùng ở một điểm với giá cả phải chăng.
Hình 1.8. Sơ đồ kết nối các thành phần AS – i
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 22 -
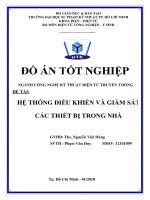
b. ASI master cho Simatic S7-300:
CP342 – 2.
CP 342-2 là Mudule ASI master cho các bộ điều khiển S7-300 và cho hệ
thống phân phối I/O ET 200M.
CP 342-2 chiếm 16 byte input và 16 byte output trong vùng analog của bộ
điều khiển mà qua đó các dữ liệu nhập của slave có thể được đọc và các dữ liệu
xuất của slave có thể được đặt.
Khi sử dụng một FC, ngoài trao đổi dữ liệu I/O, nó cũng có thể thực thi
những thủ tục gọi chính trong chương trình điều khiển.
c. ASI Gateway:
DP-ASI Gateway.
Ngay khi sử dụng cá I/O ngoại vi phân bố, sử dụng ASI có thể có các
thuận lợi. Nối mạng các ngoại vi quá trình trên profibus có thể được mở rộng
đến các sensor/actuator.
Các thiết bị sau đây có thể sử dụng như gateway cho profibus:
- DP/ASI Link 20 module (được thiết kế bằng công nghệ IP 20 để nối kết
ASI với Profibus).
- CP 242-8.
- CP 142-2 trong ET200X.
- CP 342-2 trong ET200M.
- AS 300/CPU 315-2DP với CO 2433.
Hình 1.9. ASI Master CP 342-2
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
- 23 -
- DP/AS Link (link sử dụng công nghiệp IP 65 để nối kết ASI với
Profibus).
d. ASI Master cho ET200X:
CP 142-2.
Module CP 142-2 có thể hoạt động trong hệ thống I/O phân bố ET200X,
nó cho phép kết nỗi chuỗi ASI với hệ thống I/O. Đặt điểm chính của hệ thống
I/O ET 200X là xây dựng thích nghi với các điều kiểu bảo vệ IP 65, IP 66 và IP
67.
e. ASI master cho PC-AT:
CP 2413
CP 2413 cho phép kết nối giao tiếp ASI tới máy tính.
Phần cứng của ASI master được thực hiện như một card PC. Cho phép
đến 4 ASI master CP có thể hoạt động cùng một lúc trong một PC. Điều này
nói rằng ASI PC master cũng thích hợp cho các tác vụ phức tạp.
Một chương trình hoạt động và mô phỏng sẵn sàng cũng cấp các trạng thái
hiện hành của các slave trên cáp và cho phép các điều hành đơn giản các slave.
Chương trình này cũng có thể sử dụng để những mục đích chẩn đoán, nó cũng
cho phép lập trình các địa chỉ của các slave ASI.
Từ đó không những card ASI master có thể được hoạt động trong PC mà
còn cho PC giao tiếp với Industrial Ethernet hoạt động và Profibus cùng một
lúc, dữ liệu cung cấp bởi ASI slave cũng có thể khả dụng với các trạm khác
trong mạng.
1.2.4. Mạng PROFIBUS
1.2.4.1. Định nghĩa PROFIBUS
Profibus là thuật ngữ mô tả mạng truyền thông tin số được sử dụng trong
công nghiệp để thay thế quá trình tín hiệu analog 4-20mA đang tồn tại một thời
gian dài qua. Đây là mạng truyền thông số, 2 chiều, multidrop, bus nối tiếp
nhằm để kết nối thiết bị field cách ly nhau như các điều khiển, các bộ chuyển
đổi tín hiệu, các cảm biến và các cơ cấu chấp hành.
Mỗi thiết bị field có khả năng tính toán được cài đặt trong nó và làm cho
mỗi thiết bị thành thiết bị thông minh. Mỗi thiết bị field sẽ thực hành những
chức năng đơn giản trên chính nó như các chức năng chuẩn đoán, điều khiển và
bảo trì như cung cấp khả năng truyền thông hai chiều. Ngoài ra nó còn cho
phép liên lạc với các thiết bị field khác. Cốt lõi là fieldbus sẽ thay thế các mạng
điều khiển tập trung thành các mạng điều khiển phân tán. Do đó fieldbus có
nhiều chức năng và ưu việt hơn so với việc thay thế chuẩn analog 4 – 20mA.