BÀI BÁO CÁO THỰC TẬP-kế mạch điều khiển nhiệt độ ứng dụng trong lò nhiệt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (600.53 KB, 50 trang )
Thực tập công nhân GVHD: Lê Hồng Nam
LỜI GIỚI THIỆU
Ngày nay với sự phát triển của công nghiệp vi điện tử,kỹ thuật số thì các hệ thống
điều khiển dần dần được tự động hóa. Với những kỹ thuật tiên tiến như vi xử lý,vi mạch
số… thì các hệ thống điều khiển bằng cơ khí thô sơ với tốc độ xử lý chậm chạp ít chính
xác sẽ được thay thế bằng các hệ thống điều khiển tự động với các chương trình đã được
thiết lập trước
Trong nhiều lĩnh vực sản xuất công nghiệp hiện nay,nhất là ngành công nghiệp
luyện kim,chế biến thực phẩm…. vấn đề đo và khống chế nhiệt độ đặc biết được chú
trọng đến vì nó là một tố quyết định chất lượng sản phẩm. Để đáp ứng được yêu cầu đo và
khống chế nhiệt độ thì có nhiều phương pháp để thực hiện. Với những gì đã được
học,nghiên cứu và khảo sát về vi điều khiển thì nhóm đã ứng dụng nó vào việc đo và
khống chế nhiệt độ là phương pháp tối ưu nhất. Được sự hướng dẫn của thầy,nhóm đã
thực hiện đề tài “ Thiết kế mạch điều khiển nhiệt độ ứng dụng trong lò nhiệt”
Với những kiến thức được học cùng với sự hướng dẫn của thầy giáo và sự
giúp đỡ của bạn bè,nhóm đã cố gắng hoàn thành đề tài đúng thời hạn. Do vậy không tránh
khỏi thiếu sót,nhóm em mong nhận được ý kiến từ thầy cô để đề tài của nhóm được phát
triển tốt hơn.
Đà Nẵng,ngày ,tháng ,năm2010
THIẾT KẾ MẠCH ĐIỀU KHIỂN NHIỆT ĐỘ
ỨNG DỤNG TRONG LÒ NHIỆT
1.Nhiệm vụ thiết kế:
Nhiệm vụ cần thực hiện là thiết kế một bộ điều khiển nhiệt độ với dải nhiệt độ từ
30
0
C đến 120
0
C. Vậy yêu cầu đặt ra là:
+Thiết kế bộ cảm biến nhiệt độ.
Lớp 07CDT1_Nhóm 5 Trang 1 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
+Thiết kế bộ chuyển đổi tương tự sang số ( khối ADC)
+Thiết kế khối xử lý trung tâm
+Thiết kế khối bàn phím
+Thiết kế khối công suất
+Thiết kế khối hiển thị
+Thiết kế khối giao tiếp
+Viết thuật toán.
+Viết chương trình điều khiển
2.Sơ đồ khối:
3. Chức năng từng khối:
+ Khối cảm biến nhiệt độ:dùng để đo nhiệt độ trong lò nhiệt
+ Khối xử lý trung tâm: dùng để xử lý các tín hiệu vào và xuất tín hiệu ra,điều khiển
mọi hoạt động của hệ thống.
+ Khối ADC: có nhiệm vụ số hóa tín hiệu ra của cảm biến nhiệt độ để đưa vào
VDK.
+ Khối công suất: có nhiệm vụ điều khiển,cấp nguồn cho lò nhiệt,qua đó làm thay
đổi nhiệt độ trong lò nhiệt.
+ Khối hiển thị: hiển thị nhiệt độ lò nhiệt.
+ Khối giao tiếp: trao đổi với máy tính về các thông số của quá trình điều khiển.
+ Khối bàn phím: nhập dữ liệu.
Lớp 07CDT1_Nhóm 5 Trang 2 6/2/2015
CMU 8051
Khối hiển thị
Lò nhiệt
Khối cảm biến
Khối ADC
Khối giao tiếp
Khối công suất
Khối bàn phím
Thực tập công nhân GVHD: Lê Hồng Nam
GIỚI THIỆU VỀ VI ĐIỀU KHIỂN 8951
1. Tổng quan về kỹ thuật vi điều khiển
1.1. Khái quát chung về vi điều khiển
Bộ vi điều khiển viết tắt là Micro-controller, là mạch tích hợp trên một chip có thể
lập trình được, dùng để điều khiển hoạt động của một hệ thống. Theo chương trình điều
khiển đã nạp sẵn bên trong chip, bộ vi điều khiển tiến hành đọc, lưu trữ thông tin, xử lý
thông tin, sau đó dựa vào kết quả của quá trình xử lý để đưa ra các thông báo, tín hiệu
điều khiển tiến hành điều khiển quá trình hoạt động của các thiết bị bên ngoài. Vi điều
khiển được ứng dụng trong rất nhiều sản phẩm công nghiệp và tiêu dùng.
Trong các thiết bị điện và điện tử dân dụng, các bộ vi điều khiển điều khiển hoạt
động của TV, máy giặt, đầu đọc laser, điện thoại, lò vi-ba Trong hệ thống sản xuất tự
động, bộ vi điều khiển được sử dụng trong Robot, dây chuyền tự động. Các hệ thống càng
“thông minh” thì vai trò của hệ vi điều khiển càng quan trọng.
1.2. Lịch sử phát triển của vi điều khiển
Bộ vi điều khiển thực ra là một loại vi xử lí trong tập hợp các bộ vi xử lý nói chung.
Bộ vi điều khiển được phát triển từ bộ vi xử lí, từ những năm 1970 do sự phát triển và
hoàn thiện về công nghệ vi điện tử dựa trên kỹ thuật MOS (Metal-Oxide-Semiconductor),
mức độ tích hợp của các linh kiện bán dẫn trong một chip ngày càng cao.
Năm 1971 xuất hiện bộ vi xử lí 4 bit loại TMS1000 do công ty texas Instruments
vừa là nơi phát minh vừa là nhà sản xuất. Nhìn tổng thể thì bộ vi xử lý chỉ có chứa trên
một chip những chức năng cần thiết để xử lý chương trình theo một trình tự, còn tất cả bộ
phận phụ trợ khác cần thiết như: bộ nhớ dữ liệu, bộ nhớ chương trình, bộ chuyển đổi AD,
khối điều khiển, khối hiển thị, điều khiển máy in, nối đồng hồ và lịch là những linh kiện
nằm ở bên ngoài được nối vào bộ vi xử lý.
Mãi đến năm 1976 công ty INTEL (Intelligen-Elictronics) mới cho ra đời bộ vi điều
khiển đơn chip đầu tiên trên thế giới với tên gọi 8048. Bên cạnh bộ xử lý trung tâm, 8048
còn chứa bộ nhớ dữ liệu, bộ nhớ chương trình, bộ đếm và phát thời gian, các cổng vào ra
digital trên một chip. Các công ty khác cũng lần lược cho ra đời các bộ vi điều khiển 8 bit
tương tự như 8048 và hình thành họ vi điều khiển MCS-48.
Đến năm 1980 công ty INTEL cho ra đời thế hệ thứ hai của bộ vi điều khiển đơn
chip với tên gọi 8951. Và sau đó hàng loạt các vi điều khiển cùng loại với 8951 ra đời và
hình thành họ vi điều khiển MCS-51 .
Đến nay họ vi điều khiển 8 bit MCS51 đã có đến 250 thành viên và hầu hết các
công ty hàng dẫn đầu thế giới chế tạo. Đứng đầu là công ty INTEL và rất nhiều công ty
khác như : AMD, SIEMENS, PHILIPS, DALLAS, OKI …
Lớp 07CDT1_Nhóm 5 Trang 3 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
1.3. Sơ đồ khối của một bộ vi điều khiển
Sơ đồ khối chung của hầu hết các bộ vi điều khiển bao gồm CPU, bộ nhớ ROM hay
EPROM và RAM, mạch giao tiếp, mạch giao tiếp song song, bộ định thời gian, hệ thống
ngắt và các BUS được tích hợp trên cùng một chip.
2. Kiến trúc của vi điều khiển 8951
IC vi điều khiển 8951 thuộc họ MCS51 có các đặc điểm sau :
+ 4 kbyte ROM
+ 128 byte RAM
+ 4 port I/0 8 bit
+ Hai bộ định thời 16 bits
+ Giao tiếp nối tiếp
+ 64KB không gian bộ nhớ chương trình ngoài
+ 64 KB không gian bộ nhớ dữ liệu ngoài
+ 210 bit được địa chỉ hóa
+Bộ nhân / chia 4µs
2.1. Cấu trúc bên trong của 8951
Sơ Đồ Khối 8951
Lớp 07CDT1_Nhóm 5 Trang 4 6/2/2015
INT\1
INT\0
TIMER2
TIMER1
PORT nối tiếp
TXD
*
RXD
*
T
1
*
T
2
*
P
0
P
1
P
2
P
3
EA\ RST PSEN ALE
Cacthanh
ghi khác
128 byte
Ram
Rom
4K-8951
OK-8031
Timer1
Timer2
Điều khiển
ngắt
Điều khiển
bus
CPU
Port nối
tiếp
Cc port I/O
Tạo dao
động
Thực tập công nhân GVHD: Lê Hồng Nam
Phần chính của vi điều khiển 8951 là bộ xử lí trung tâm (CPU: central
processing unit) bao gồm :
+ Thanh ghi tích lũy A
+ Thanh ghi tích lũy phụ B, dùng cho phép nhân và phép chia
+ Đơn vị logic học (ALU : Arithmetic Logical Unit )
+ Từ trạng thái chương trình (PSW : Prorgam Status Word)
+ Bốn băng thanh ghi
+ Con trỏ ngăn xếp
+ Ngoài ra còn có bộ nhớ chương trình, bộ giải mã lệnh, bộ điều khiển thời gian và
logic.
Đơn vị xử lí trung tâm nhận trực tiếp xung từ bộ dao động, ngoài ra còn có khả
năng đưa một tín hiệu giữ nhịp từ bên ngoài.
Chương trình đang chạy có thể cho dừng lại nhờ một khối điều khiển ngắt ở
bên trong. Các nguồn ngắt có thể là: các biến cố ở bên ngoài, sự tràn bộ đếm định
thời hoặc cũng có thể là giao diện nối tiếp.
Hai bộ định thời 16 bit hoạt động như một bộ đếm.
Các cổng (port0,1,2,3), sử dụng vào mục đích điều khiển. Ở cổng 3 có thêm các
đường dẫn điều khiển dùng để trao đổi với một bộ nhớ bên ngoài, hoặc để đầu nối giao
diện nối tiếp, cũng như các đường ngắt dẫn bên ngoài. Giao diện nối tiếp có chứa một bộ
truyền và một bộ nhận không đồng bộ, làm việc độc lập với nhau.Tốc độ truyền qua cổng
nối tiếp có thể đặt trong dãi rộng và được ấn định bằng một bộ định thời.
Trong vi điều khiển 8951 có hai thành phần quan trọng khác đó là bộ nhớ và các
thanh ghi :
+ Bộ nhớ gồm có bộ nhớ RAM và bộ nhớ ROM dùng để lưu trữ dữ liệu và mã
lệnh.
+ Các thanh ghi sử dụng để lưu trữ thông tin trong quá trình xử lí. Khi CPU làm
việc nó làm thay đổi nội dung của các thanh ghi.
2.2.Chức năng các chân của vi điều khiển 8951
Lớp 07CDT1_Nhóm 5 Trang 5 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
C 1 3 0 p
C 2 3 0 p
U 2
8 0 5 1
3 1
1 9
1 8
9
1 2
1 3
1 4
1 5
1
2
3
4
5
6
7
8
3 9
3 8
3 7
3 6
3 5
3 4
3 3
3 2
2 1
2 2
2 3
2 4
2 5
2 6
2 7
2 8
1 7
1 6
2 9
3 0
1 1
1 0
E A / V P
X 1
X 2
R E S E T
I N T 0
I N T 1
T 0
T 1
P 1 . 0
P 1 . 1
P 1 . 2
P 1 . 3
P 1 . 4
P 1 . 5
P 1 . 6
P 1 . 7
P 0 . 0
P 0 . 1
P 0 . 2
P 0 . 3
P 0 . 4
P 0 . 5
P 0 . 6
P 0 . 7
P 2 . 0
P 2 . 1
P 2 . 2
P 2 . 3
P 2 . 4
P 2 . 5
P 2 . 6
P 2 . 7
R D
W R
P S E N
A L E / P
T X D
R X D
R S T
1 2 M H z
Hình 2.3 :
Sơ đồ chân 8951
Vi điều khiển 8951 có 32 trong 40 chân có chức năng như là các cổng I/O, trong đó
24 chân được sử dụng với hai mục đích. Nghĩa là ngoài chức năng cổng I/O, mỗi chân có
công dụng kép này có thể là một đường điều khiển của Bus địa chỉ hay Bus dữ liệu hoặc
là mỗi chân hoạt động mọt cách độc lập để giao tiếp với các thiết đơn bit như là công tắc,
LED, transistor…
a.Port0: là port có 2 chức năng, ở trên chân từ 32 đến 39 của MC 8951. Trong các
thiết kế cỡ nhỏ không dùng bộ nhớ ngoài, P0 được sử dụng như là những cổng
I/O. Còn trong các thiết kế lớn có yêu cầu một số lượng đáng kể bộ nhớ ngoài thì P0
trở thành các đường truyền dữ liệu và 8 bit thấp của bus địa chỉ.
b. Port1: là một port I/O chuyên dụng, trên các chân 1-8 của MC8951. Chúng được
sử dụng với một múc đích duy nhất là giao tiếp với các thiết bị ngoài khi cần thiết.
c. Port2: là một cổng có công dụng kép trên các chân 21 – 28 của MC 8951. Ngoài
chức năng I/O, các chân này dùng làm 8 bit cao của bus địa chỉ cho những mô hình thiết
kế có bộ nhớ chương trình ROM ngoài hoặc bộ nhớ dữ liệu RAM có dung lượng lớn hơn
256 byte.
d. Port3: là một cổng có công dụng kép trên các chân 10 – 17 của MC 8951. Ngoài
chức năng là cổng I/O, những chân này kiêm luôn nhiều chức năng khác nữa liên quan
đến nhiều tính năng đặc biệt của MC 8951, được mô tả trong bảng sau:
Lớp 07CDT1_Nhóm 5 Trang 6 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Bit Tên Chức năng chuyển đổi
3.0
3.1
3.2
3.3
3.4
3.5
3.6
3.7
RxD
TxD
INT0
INT1
T0
T1
ÖWR
RD
Ngõ vào dữ liệu nối tiếp.
Ngõ xuất dữ liệu nối tiếp.
Ngắt ngoài 0.
Ngắt ngoài 1.
Ngõ vào TIMER 0.
Ngõ vào của TIMER 1.
Điều khiển ghi dữ liệu lên bộ nhớ ngoài.
Điều khiển đọc bộ nhớ dữ liệu ngoài.
Chức năng của các chân trên port3
e. PSEN (Program Store Enable): 8951 có 4 tín hiệu điều khiển, PSEN là tín hiệu ra
trên chân 29. Nó là tín hiệu điều khiển để cho phép truy xuất bộ nhớ
chương trình mở rộng và thường được nối đến chân OE (Output Enable) của một
EPROM để cho phép đọc các byte mã lệnh của chương trình. Tín hiệu PSEN ở mức thấp
trong suốt phạm vi quá trình của một lệnh. Các mã nhị phân của chương trình được đọc
từ EPROM qua bus và được chốt vào thanh ghi lệnh của 8951 để giải mã lệnh. Khi thi
hành chương trình trong ROM nội PSEN sẽ ở mức cao.
f. ALE (Address Latch Enable ): Tín hiệu ra ALE trên chân 30 tương hợp với các
thiết bị làm việc với các xử lý 8585, 8088. 8951 dùng ALE để giải đa hợp bus địa chỉ và
dữ liệu, khi port 0 được dùng làm bus địa chỉ/dữ liệu đa hợp: vừa là bus dữ liệu vừa là
byte thấp của địa chỉ 16 bit . ALE là tín hiệu để chốt địa chỉ vào một thanh ghi bên ngoài
trong nữa đầu của chu kỳ bộ nhớ. Sau đó, các đường Port 0 dùng để xuất hoặc nhập dữ
liệu trong nữa sau chu kỳ của chu kỳ bộ nhớ.
Các xung tín hiệu ALE có tốc độ bằng 1/6 lần tần số dao động trên chip và có thể
được dùng là nguồn xung nhịp cho các hệ thống. Nếu xung trên 8951 là 12MHz thì ALE
có tần số 2MHz. Chân này cũng được làm ngõ vào cho xung lập trình cho EPROM trong
8951.
g. EA (External Access): Tín hiệu vào EA trên chân 31 thường được nối lên mức
cao (+5V) hoặc mức thấp (GND). Nếu ở mức cao, 8951 thi hành chương trình từ ROM
nội trong khoảng địa chỉ thấp (4K). Nếu ở mức thấp, chương trình chỉ được thi hành từ bộ
nhớ mở rộng. Người ta còn dùng chân EA làm chân cấp điện áp 21V khi lập trình cho
EPROM trong 8951.
Lớp 07CDT1_Nhóm 5 Trang 7 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
h. RST (Reset): Ngõ vào RST trên chân 9 là ngõ reset của 8951. Khi tín hiệu này
được đưa lên mức cao (trong ít nhất 2 chu kỳ máy), các thanh ghi trong 8951 được đưa
vào những giá trị thích hợp để khởi động hệ thống.
i.OSC: 8951 có một bộ dao động trên chip, nó thường được nối với thạch anh giữa
hai chân 18 và 19. Tần số thạch anh thông thường là 12MHz.
j. POWER: 8951 vận hành với nguồn đơn +5V. V
cc
được nối vào chân 40 và V
ss
(GND) được nối vào chân 20.
THIẾT KẾ MẠCH CẢM BIẾN VÀ ADC
1. GIỚI THIỆU :
1.1.CHUYỂN ĐỔI A/D :
1.1.1. NGUYÊN TẮC CHUYỂN ĐỔI:
Mạch chuyển đổi tín hiệu tương tự sang số,chuyển một tín hiệu ngõ vào tương tự
(dòng điện hay điện áp) thành dạng mã số nhị phân có giá trị tương ứng.
Chuyển đổi ADC có rất nhiều phương pháp.Tuy nhiên,mỗi phương pháp điều có
những thông số cơ bản khác nhau:
+Độ chính xác của chuyển đổi AD.
+ Tốc độ chuyển đổi .
+ Dải biến đổi của tín hiệu tương tự ngõ vào
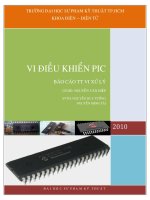
Hình Sơ đồ khối tổng quát của mạch ADC
Hoạt động
-Đầu tiên kích xung start để bộ ADC hoạt động
Lớp 07CDT1_Nhóm 5 Trang 8 6/2/2015
+
Startcommand
V
A
V’
A
Control Unit
Register
D/A
converter
Comparator
clock
Digital output
Thực tập công nhân GVHD: Lê Hồng Nam
-
-Tại một tần số được xác định bằng xung clock bộ điều khiển làm thay đổi thành số
nhị phân được lưu trữ trong thanh ghi(Register) Số nhị phân trong thanh ghi được chuyển
thành dạng điện áp V’
a
bằng bộ chuyển đổi DA.
-Bộ so sánh,so sánh V’
a
với điện áp ngõ vào V
a
.Nếu V’
a
< V
a
thì ngõ ra của bộ so
sánh vẫn giữ mức cao. Khi V’
a
> V
a
ngõ ra của bọâ so sánh xuống mức thấp và quá trình
thay đổi số của thanh ghi ngưng. Lúc này V’
a
gần bằng V
a
, những số trong thanh ghi là
những số cần chuyển đổi .
1.1.2. ADC0804 :
-CS (Chip select)
Chân số 1, là chân chọn Chip, đầu vào tích cực mức thấp được sử dụng để kích hoạt Chip
ADC0804. Để truy cập ADC0804 thì chân này phải ở mức thấp.
- RD (Read)
Chân số 2, là một tín hiệu vào, tích cực ở mức thấp. Các bộ chuyển đổi đầu vào tương tự
thành số nhị phân và giữ nó ở một thanh ghi trong. RD được sử dụng để có dữ liệu đã
được chyển đổi tới đầu ra của ADC0804.
Lớp 07CDT1_Nhóm 5 Trang 9 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Khi CS = 0 nếu có một xung cao xuống thấp áp đến chân RD thì dữ liệu ra dạng số
8 bit được đưa tới các chân dữ liệu (DB0 – DB7).
- WR (Write)
Chân số 3, đây là chân vào tích cực mức thấp được dùng để báo cho ADC biết bắt đầu
quá trình chuyển đổi. Nếu CS = 0 khi WR tạo ra xung cao xuống thấp thì bộ ADC0804
bắt đầu quá trình chuyển đổi giá trị đầu vào tương tự Vin về số nhị phân 8 bit. Khi việc
chuyển đổi hoàn tất thì chân INTR được ADC hạ xuống thấp.
- Ngắt INTR (Interupt)
Chân số 5, là chân ra tích cực mức thấp. Bình thường chân này ở trạng thái cao và khi
việc chuyển đổi hoàn tất thì nó xuống thấp để báo cho CPU biết là dữ liệu chuyển đổi sẵn
sàng để lấy đi. Sau khi INTR xuống thấp, cần đặt CS = 0 và gửi một xung cao xuống thấp
tới chân RD để đưa dữ liệu ra.
Vin (+) và Vin (-) •
Chân số 6 và chân số 7, đây là 2 đầu vào tương tự vi sai, trong đó Vin = Vin(+) – Vin (-).
Thông thường Vin (-) được nối tới đất và Vin (+) được dùng làm đầu vào tương tự và sẽ
được chuyển đổi về dạng số.
- Vcc
Chân số 20, là chân nguồn nuôi +5V. Chân này còn được dùng làm điện áp tham chiếu
khi đầu vào Vref/2 để hở.
- Vref/2
Chân số 9, là chân điện áp đầu vào được dùng làm điện áp tham chiếu. Nếu chân này hở
thì điện áp đầu vào tương tự cho ADC0804 nằm trong dải 0 - +5V. Tuy nhiên, có nhiều
ứng dụng mà đầu vào tương tự áp đến Vin khác với dải 0 - +5V. Chân Vref/2 được dùng
để thực hiện các điện áp đầu ra khác 0 - +5V.
Bảng quan hệ điện áp Vref/2 với Vin
Lớp 07CDT1_Nhóm 5 Trang 10 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
D0 - D7
D0 - D7, chân số 18 – 11, là các chân ra dữ liệu số (D7 là bit cao nhất MSB và D0 là bit thấp nhất
LSB). Các chân này được đệm ba trạng thái và dữ liệu đã được chuyển đổi chỉ được truy cập khi
chân CS = 0 và chân RD đưa xuống mức thấp. Để tính điện áp đầu ra ta tính theo công thức sau
- Mạch tạo xung clock cho ADC 0804 :
Tuy nhiên ADC0804 cũng có một bộ tạo xung đồng hồ riêng. Để dùng đồng hồ
riêng thì các chân CLK IN (chân số 4) và CLK R (chân số 19) được nối với một tụ điện
và một điện trở (như hình vẽ). Khi ấy tần số được xác định bằng biểu thức:
Lớp 07CDT1_Nhóm 5 Trang 11 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Với R=10 kΩ , C=150pF và tần số f=606 kHz và thời gian chuyển đổi là 110 ms.
Hình Biểu đồ thời gian của ADC 0804
1.2.ĐO NHIỆT ĐỘ BẰNG IC:
1.2.1.Giới thiệu:
Kỹ thuật vi điện tử cho phép chế tạo được những mạch kết nối gồm những
transistor giống nhau được sử dụng để làm cảm biến hoàn hảo đo nhiệt độ dựa vào việc đo
sự khác biệt điện áp V
BE
dưới tác động của nhiệt độ .Các cảm biến này tạo ra các dòng
điện hặc điện áp tỷ lệ với nhiệt độ tuyệt đối,với độ tuyến tính cao; nó có điều lợi là vận
hành đơn giản, tuy nhiên phạm vi hoạt động giới hạn chỉ trong khoảng –55
0
C đến 150
0
C.
1.2.2.Nguyên lý chung của IC đo nhiệt độ :
Là mạch tích hợp nhận tín hiệu nhiệt độ chuyển thành tín hiệu dưới dạng điện áp
hoặc tín hiệu dòng điện. Dựa vào đặc tính rất nhạy của các bán dẫn với nhiệt độ, tạo ra
điện áp hoặc dòng điện tỷ lệ thuận với nhiệt độ tuyệt đối. Đo tín hiệu điện, ta biết được
giá trị của nhiệt độ cần đo.
Lớp 07CDT1_Nhóm 5 Trang 12 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Sự tích cực của nhiệt độ tạo ra điện tích tự do và các lỗ trống trong chất bán dẫn
bằng sự phá vỡ các phân tử, bứt các electron thành dạng tự do di chuyển qua các vùng cấu
trúc mạng tinh thể, tạo sự xuất hiện các lỗ trống nhiệt làm cho tỷ lệ điện tử tự do và các lỗ
trống tăng lên theo quy luật hàm mũ với nhiệt độ. Kết quả của hiện tượng này là dưới mức
điện áp thuận, dòng thuận của mối nối p-n (trong diode hay transistor) sẽ tăng theo hàm
mũ theo nhiệt độ.
2.MẠCH CẢM BIẾN NHIỆT :
p 1 . 0
p 3 . 7
p 1 . 5
R 9
1 0 K
+ 5 V
p 1 . 1
U 6
A D C 0 8 0 4
6
7
8
9
1 0
1 1
1 2
1 3
1 4
1 5
1 6
1 7
1 8
1 9
2 0
4
5
1
2
3
+ I N
- I N
A G N D
V R E F / 2
G N D
D B 7
D B 6
D B 5
D B 4
D B 3
D B 2
D B 1
D B 0
C L K R
V C C / V R E F
C L K I N
I N T R
C S
R D
W R
V R E F
p 1 . 7
p 1 . 4
U 3
L M 3 5
1 2
3
V S + V O U T
G N D
R D
+
C 5
4 . 7 u f
W R
p 1 . 3
C 4
1 5 0 p F
+ 5 V
p 1 . 6
p 1 . 2
Để đo nhiệt độ được chính xác, tất nhiên cần có một đầu dò thích hợp. Đầu dò là
một cảm biến nhiệt độ có nhiệm vụ vận chuyển từ nhiệt độ qua tín hiệu điện. Có rất nhiều
loại cảm biến như giới thiệu ở chương I.Dựa vào lý thuyết và thực tế của mạch cần thiết
kế ta dùng phương pháp đo bằng IC cảm biến nhiệt độ. Các IC cảm biến nhiệt độ có độ
chính xác cao, dễ tìm và giá thành rẽ. Một trong số đó là IC LM35, là loại thông dụng trên
thị trường hiện nay, đồng thời nó có những đặc tính làm việc phù hợp với thiết kế chi tiết
của mạch.
-Một số tính chất cơ bản của LM35:
- LM35 có độ biến thiên theo nhiệt độ: 10mV / 1
o
C.
Lớp 07CDT1_Nhóm 5 Trang 13 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
- Độ chính xác cao, tính năng cảm biến nhiệt độ rất nhạy, ở nhiệt độ 25
o
C nó
có sai số không quá 1%. Với tầm đo từ -55
o
C – 150
o
C, tín hiệu ngõ ra tuyến tính liên tục
với những thay đổi của tín hiệu ngõ vào.
- Thông số kỹ thuật:
Tiêu tán công suất thấp.
Dòng làm việc từ 450µA – 5mA.
Dòng ngược 15mA.
Dòng thuận 10mA.
- Đặc tính điện:
Theo thông số của nhà sản xuất LM35, quan hệ giữa nhiệt độ và điện áp ngõ ra như
sau:
V
out
= 0,01×T
o
C
Vậy ứng với tầm hoạt động từ 0
o
C – 150
o
C ta có sự biến thiên điện áp ngõ ra là:
Ở 0
o
C thì điện áp ngõ ra V
out
= 0 (V).
Ở 150
o
C thì điện áp ngõ ra V
out
= 1,5(V).
KHỐI HIỂN THỊ VÀ BÀN PHÍM
1Khối hiển thị:
1.1.Sơ đồ nguyên lý:
Lớp 07CDT1_Nhóm 5 Trang 14 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
D 2 L E D 2
7
6
4
2
1
9
1 0
5
3
8
A
B
C
D
E
F
G
H
A 1
A 2
p 0 . 7
T 2
T 1
p 0 . 5
+ 5 V
Q 3
A 1 0 1 5
p 0 . 2
R N 2
1 0 k
1
2
3
4
5
6
7
8
9
R 4
1 K
D 3 L E D 3
7
6
4
2
1
9
1 0
5
3
8
A
B
C
D
E
F
G
H
A 1
A 2
p 0 . 3
+ 5 V
L 1
Q 1
A 1 0 1 5
R 1 2
1 5 0
L 2
p 0 . 4
R 2
1 k
D 1 L E D 1
7
6
4
2
1
9
1 0
5
3
8
A
B
C
D
E
F
G
H
A 1
A 2
T 4
p 0 . 0
p 0 . 6
R 1 1
1 5 0
L 3
R 1 3 1 5 0
p 0 . 1
D 4 L E D 4
7
6
4
2
1
9
1 0
5
3
8
A
B
C
D
E
F
G
H
A 1
A 2
Q 4
A 1 0 1 5
L 2
L 4
Q 2
A 1 0 1 5
+ 5 V
+ 5 V
R 3
1 k
L 4
R 1 5 1 5 0
R 1 8 1 5 0
L 1
T 3
R 1
1 k
L 3
R 1 6 1 5 0
R 1 7 1 5 0
+ 5 V
R 1 4 1 5 0
Nguyên lý hoạt động :
Trong hệ thống vi xử lý, bộ hiển thị đóng vai trò rất quan trọng: dùng để giao tiếp
với máy tính và người sử dụng, cho phép người sử dụng quan sát, cảm nhận quá trình làm
việc của hệ thống. Ở đây bộ hiển thị chỉ có chức năng là hiển thị nhiệt độ ngoài ra không
có chức năng khác để đơn giản được phần cứng thì chỉ cho phép nhiệt độ hiển thị từ 0
0
C
– 99
0
C từ port 1 của vi điều khiển. Bộ hiển thị hằng Led 7 đoạn là loại được sử dụng phổ
biến
khác.
Lớp 07CDT1_Nhóm 5 Trang 15 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Hình 7.4.d . a: Bộ hiển thị Led 7 đoạn, b: Loại anode chung, c: Loại Cathod
chung.
Khối hiển thị gồm 3 led 7 đoạn và 2 led đơn.Khi led đơn vàng sáng thì ta nhập giá
trị nhiệt độ cần khống chế vào.Giá trị nhiệt độ này sẽ hiển thị trên led 7 đoạn.Khi led xanh
sáng thì led 7 đoạn sẽ hiển thị nhiệt độ hiện tại của lò.Nhiệt độ này sẽ lấy từ cảm biến
nhiệt độ.
*Kiểm tra khối hiển thị:
Lớp 07CDT1_Nhóm 5 Trang 16 6/2/2015
BCD inputs
Segment
outputs
Displ
ay
A B C D a c d e f g
0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 1 1 0 0 1 1 1 1 1
0 0 1 0 0 0 1 0 0 1 0 2
0 0 1 1 0 0 0 0 1 1 0 3
0 1 0 0 1 0 0 1 1 1 1 4
0 1 0 1 0 0 1 0 0 1 0 5
0 1 1 0 1 1 0 0 0 0 0 6
0 1 1 1 0 0 0 1 1 1 1 7
1 0 0 0 0 0 0 0 0 0 0 8
1 0 0 1 0 0 0 1 1 0 0 9
ff
g g
cc
Vcc
e e
d d
aa
b b
Thực tập công nhân GVHD: Lê Hồng Nam
-Kiểm tra điện áp cung cấp cho IC cảm biến LM35,IC 89C52 và IC chuyển đổi mã
có đúng và có đủ không,đo điện áp ra trên mỗi IC xem có đạt yêu cầu không.
-Kiểm tra các điện trở nối từ bộ chuyển đổi đến các led 7 đoạn có đúng không,kiểm
tra các điện trở kéo từ nguồn xuống có đúng không.
-Kiểm tra các led 7 đoạn có đúng loại không(ở đây dùng loại anod chung)
*Nếu led 7 đoạn không sáng thì phải kiểm tra:
-Kiểm tra led có đúng loại không(anod chung)
-Kích cho đường cung cấp nguồn(kiểm tra con bjt có dẫn không)
-Kiểm tra con giải mã có hoạt động không.
*Nếu hiển thị không đúng thì phải kiểm tra:
-Cho quét chậm,quét hết cột này đến cột kia(cho delay lớn)
-Kiểm tra điện áp kích cho cột,hàng có đúng không(xuất giá trị ra rồi phải tắt led)
Các linh kiện sử dụng trong mạch:
a.IC74LS47: dùng để chuyển tín hiệu dạng số nhị phân ở ngõ vào sang mã 7 đoạn.
IC này hoạt động ở tích cực mức thấp. Do đó ta có bảng chân thực sau:
Để IC hoạt động ta kết nối chân 16 (Vcc) với nguồn 5 V, chân số 8 với đất. Ngỏ
vào có 4 chân là 7,1,2,6 tương ứng với A,B,C,D trong đó mức ý nghĩa giảm dần từ A đến
D. Kết nối các ngõ ra A,B,C,D của iC với các công tắc mà mỗi công tắc đơn giản là nằm
giữa 2 mức cao hoặc thấp. Các chân LT, BI/RBO, RBI không cần kết nối. Nếu ta dùng
Led 7 đoạn kiểu cathod chung thì mỗi ngõ ra của IC 7447 cần kết nối với các cổng đảo
trước khi đến các chân của Led.
1.2.Tính giá trị địên trở hạn dòng R
hd
nối với 74LS47 :
Nguồn cung cấp V
cc
= 5V. Các thông số ngõ ra của IC7447 là :
V
ol
= 0.4V
I
ol
= 40mA .
- Giả sử , ta muốn các led sáng với một dòng định mức I
ledđm
=10mA vậy:
I
hd
=
T
T
0
.I
ledđm
Với T
0
là thời gian 1 led sáng
T là thời gian led đó không sáng
Chọn thời gian sáng cho 1 led là 100µs
Thời gian không có dòng chạy qua led là 600 µs
- Mỗi đoạn của led cần dòng khoảng 10mA để sáng , để đơn giản ta xem led 7
đoạn gồm 7 led đơn.
Lớp 07CDT1_Nhóm 5 Trang 17 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Vậy dòng qua led là i
hd
= 10.7 = 70 (mA)
I
hd
=
600
100
.70 = 28,5(mA)
Chọn BJT 2SA1015 có β = 70
Dòng I
Bmin
= 28,5/70 =0,41(mA)
Chọn I
B
=(2÷3)I
Bmin
=2.0.41 =0.82(mA)
R
hd
= (V
cc
– V
LED
– V
ol
)/I
LED
=> R
hd
= (5V-1.8V –0.4V )/0.82mA
=> R
hd
= 3,4KΩ
R
hd
=3,9KΩ.
Lúc đó I
LED
= (5V - 1,8V - 0,4V)/3,9kΩ = 0,7(mA)
1.3.Tính giá trị điện trở R
b
nối với BJT:
- Xét điều kiện để transistor boã hoà là :I
c
≥βI
b
Với led 7 đoạn, để 1 led sáng cần dòng 10mA, để sáng hết 7 led cần dòng I
c
=
7.10 = 70 (mA)
Chọn BJT A1015 có β
min
= 70 .Tại ngõ ra của IC8051 có các thông số sau :
I
ol
= 3.2mA
V
ol
=0.4 V
Vậy dòng I
b
nằm trong giới hạn sau :
β
c
I
≤ I
b
≤ I
ol
hay
β
c
I
≤
b
b
R
U
≤I
ol
Từ đó ta suy ra R:
R
b
≥
ol
b
I
U
=
ol
olcc
I
VVV
−−
γ
=
0032,0
4,08,05 VVV
−−
=
0032,0
8,3
1187,5Ω
Chọn R
B
=1.2K Ω
Lúc đó với led 7 đoạn ta có:
I
b
=
b
b
R
U
=
1200
8,3
= 3,16 (mA) ≥
70
70
=1(mA)
Với led đơn ta có:
I
b
= 3,16 (mA) ≥
70
10
=0,14(mA)
2.Bàn phím
Lớp 07CDT1_Nhóm 5 Trang 18 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
Nguyên lý:
+ 5 V
p 2 . 6
R 5
4 . 7
R 2 1
4 . 7
R 2 0
4 . 7
S W 3
S W P U S H B U T T O N
R 2 2
4 . 7 K
S W 5
S W P U S H B U T T O N
p 2 . 4
S W 4
S W P U S H B U T T O N
p 2 . 7
S W 2
S W P U S H B U T T O N
p 2 . 5
Để thực hiện ma trận bàn phím ta dùng phương pháp quét phím. Quét cột và đọc
dữ liệu tại hàng hoặc ngược lại. Theo hình vẽ thì các cột cách nhau 1 đơn vị, các hàng
cách nhau 4 đơn vi.
Vậy giá trị của bàn phím được tính theo công thức sau
Bp= C+h.4
Trong đó: Bp: Giá trị của phím được nhấn.
C: Cột được quét.
H: Hàng có phím nhấn.
Khi mạch cần nhiều phím thì ta mới tổ chức ma trận phím để giảm số lượng
cổng sử dụng cho bàn phím.
Ban đầu các nút bám được set ở mức cao,khi nhấn nút thì chuyển sang mức
thấp(mức 0)
*Kiểm tra bàn phím :
-Trước hết phải kiểm tra đã gắn các chan của nút bấm đã đúng chưa:có 1 cặp chân
của nút bấm ở mức cao,khi bấm thì xuống mức thấp,dùng đồng hồ kiểm tra khi nhấn nút
có thông mạch không.
Lớp 07CDT1_Nhóm 5 Trang 19 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
-Kiểm tra vị trí các nút bấm đã chính xác chưa(tương ứng với hàng và cột như hình
vẽ trên)
*Nếu đã nhấn phím và hiển thị không mà không hiển thị số bấm thì phải kiểm
tra như sau:
-Kiểm tra phần cứng xem có đúng với chương trình đã viết không.
-Kiểm tra xem các nút có bị dính với nhau không.
KHỐI GIAO TIẾP
1. Cấu trúc cổng nối tiếp:
Cổng
nối
tiếp
được
sử
dụng
để
truyền
dữ
liệu
hai
chiều
giữa
máy
tính
và
ngoại
vi,
có
các
ưu
điểm
sau:
- Khoảng
cách
truyền
xa
hơn
truyền
song
song.
- Số
dây
kết
nối
ít.
- Có
thể
truyền
không
dây
dùng
hồng
ngoại.
- Có
thể
ghép
nối
với
vi
điều
khiển
hay
PLC
(Programmable
Logic
Device).
- Cho
phép
nối
mạng.
- Có
thể
tháo
lắp
thiết
bị
trong
lúc
máy
tính
đang
làm
việc.
- Có
thể
cung
cấp
nguồn
cho
các
mạch
điện
đơn
giản
Các
thiết
bị
ghép
nối
chia
thành
2
loại:
DTE
(Data
Terminal
Equipment)
và
DCE
(Data
Communication
Equipment).
DCE
là
các
thiết
bị
trung
gian
như
MODEM
còn
DTE
là
các
thiết
bị
tiếp
nhận
hay
truyền
dữ
liệu
như
máy
tính,
PLC,
vi
điều
khiển,
…
Việc
trao
đổi
tín
hiệu
thông
thường
qua
2
chân
RxD
(nhận)
và
TxD
(truyền).
Các
tín
hiệu
còn
lại
có
chức
năng
hỗ
trợ
để
thiết
lập
và
điều
khiển
quá
trình
truyền,
được
gọi
là
các
tín
hiệu
bắt
tay
(handshake).
Ưu
điểm
của
quá
trình
truyền
dùng
tín
hiệu
bắt
tay
là
có
thể
kiểm
soát
đường
truyền.
Tín
hiệu
truyền
theo
chuẩn
RS-232
của
EIA
(Electronics
Industry
Associations).
Chuẩn
RS-232
quy
định
mức
logic
1
ứng
với
điện
áp
từ
-3V
đến
-25V
(mark),
mức
logic
0
ứng
với
điện
áp
từ
3V
đến
25V
(space)
và
có
khả
năng
cung
cấp
dòng
từ
10
mA
đến
20
mA.
Ngoài
ra,
tất
cả
các
ngõ
ra
đều
có
đặc
tính
chống
chập
mạch.
Chuẩn
RS-232
cho
phép
truyền
tín
hiệu
với
tốc
độ
đến
20.000
bps
nhưng
nếu
cáp
truyền
đủ
ngắn
có
thể
lên
đến
115.200
bps.
Các
phương
thức
nối
giữa
DTE
và
DCE:
-
Đơn
công
(simplex
connection):
dữ
liệu
chỉ
được
truyền
theo
1
hướng.
Lớp 07CDT1_Nhóm 5 Trang 20 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
-
Bán
song
công
(
half-duplex):
dữ
liệu
truyền
theo
2
hướng,
nhưng
mỗi
thời
điểm chỉ
được
truyền
theo
1
hướng.
-
Song
công
(full-duplex):
số
liệu
được
truyền
đồng
thời
theo
2
hướng.
Định
dạng
của
khung
truyền
dữ
liệu
theo
chuẩn
RS-232
như
sau:
S
tart
D
0
D
1
D
2
D
3
D
4
D
5
D
6
D
7
P
S
top
0 1
Khi
không
truyền
dữ
liệu,
đường
truyền
sẽ
ở
trạng
thái
mark
(điện
áp
-10V).
Khi
bắt
đầu
truyền,
DTE
sẽ
đưa
ra
xung
Start
(space:
10V)
và
sau
đó
lần
lượt
truyền
từ
D0
đến
D7
và
Parity,
cuối
cùng
là
xung
Stop
(mark:
-10V)
để
khôi
phục
trạng
thái
đường
truyền.
Các
đặc
tính
kỹ
thuật
của
chuẩn
RS-232
như
sau:
Chiều
dài
cable
cực
đại
15m
Tốc
độ
dữ
liệu
cực
đại
20
Kbps
Điện
áp
ngõ
ra
cực
đại
25V
Điện
áp
ngõ
ra
c
ó
tải
5V
đế
n
15V
Trở
kháng
tải 3K
đến
7K
Điện
áp
ngõ
vào
15V
Độ
nhạy
ngõ
vào
3V
Trở
kháng
ngõ
vào
3K
đến
7K
Các
tốc
độ
truyền
dữ
liệu
thông
dụng
trong
cổng
nối
tiếp
là:
1200
bps,
4800
bps,
9600
bps
và
19200
bps
–
Sơ
đồ
chân
cổng
nối
tiếp
M
ô tả
S
ố chân
1
Da ta carrier detect
(DCD)
Tránh tín hi
ệu mạng
dư liêu
2
Received data
(RxD)
D
ữ
li
ệu đ ược nhận
3
Transmitted data
D
ữ liệu được gởi
Lớp 07CDT1_Nhóm 5 Trang 21 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
(TxD)
4
Data terminal ready
(DTR)
Đ
ầu dư liệu sẳn sàng
5
Signal ground
(GND)
Đ
ất của tín hiệu
6
Request to send
(RTS)
D
ữli ệu sẳn sàng
7
Request to send
(RTS)
Yêu c
ầu dữ liệu
8
Clear to send (CTS)
Xoá đ
ể gởi
9
Ring indicator (RL)
Báo chuông
2. Giao tiếp với vi điều khiển
Khi
thực
hiện
giao
tiếp
với
vi
điều
khiển,
ta
phải
dùng
thêm
mạch
chuyển
mức
logic
từ
TTL
RS
232
và
ngược
lại.
Các
vi
mạch
thường
sử
dụng
là
MAX232
của
Maxim
hay
DS275
của
Dallas.
Mạch
chuyển
mức
logic
mô
tả
như
sau:
P 1
D B 9
5
9
4
8
3
7
2
6
1
U 1
M A X 2 3 2
C 1 +
1
C 1 -
3
C 2 +
4
C 2 -
5
V C C
1 6
G N D
1 5
V +
2
V -
6
R 1 O U T
1 2
R 2 O U T
9
T 1 I N
1 1
T 2 I N
1 0
R 1 I N
1 3
R 2 I N
8
T 1 O U T
1 4
T 2 O U T
7
C 1
1 0 u
J 1
C O N 4
1
2
3
4
V C C
C 2
1 0 u
V C C
C 3
1 0 u
C 4
1 0 u
C 5
1 0 u
Mạch
chuyển
mức
logic
TTL
RS232.
Tuy
nhiên,
khi
sử
dụng
mạch
chuyển
mức
logic
dùng
các
vi
mạch
thì
đòi
hỏi
phải dùng
chung
GND
giữa
máy
tính
và
vi
mạch
có
khả
năng
làm
hỏng
cổng
nối
tiếp
khi
xảy
ra
hiện
tượng
chập
mạch
ở
mạch
ngoài.
Do
đó,
ta
có
thể
dùng
thêm
opto
4N35
để
cách
ly
về
điện.
*Kiểm tra Max232:
-Đo nguồn,đo các tụ xem có đạt yêu cầu không
-Kiểm tra các chân của tụ,của Max232 đã đúng chưa,các điều kiện có đủ không
-Đấu chân (2) và chân (3) gửi dữ liệu xuống => nhận được là được.
Lớp 07CDT1_Nhóm 5 Trang 22 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
-Chập ngõ ra của Max232,nối với chân ra của IC89C52 xem có giao tiếp được
không(xem có thu phát dữ liệu được không)
-Ưu tiên cổng COM trước.
KHỐI CÔNG SUẤT VÀ ĐỒNG BỘ
1. Sơ đồ nguyên lý:
R 1 8
1 0 0 k
V C C
R 2 0
5 k 6
-
+
U 9 A
L M 3 9 3
3
2
1
84
R 1 7
1 0 0 k
J 5
X O A Y C H I E U
1
2
R 2 6
1 2 k
V C C
R 2 4
8 k 2
U 8
M O C 3 0 2 1
1
2
64
C 7
1 u F
Q 1
T R I A C
Q 2
A 1 0 1 5
R 1 1
3 3 0
R 1 2
3 , 3 k
R 1 3
1 8 0
R 2 5
2 k 4
C 8
1 u F
J 4
T A I + N G U O N
1
2
D 2
D I O D E
P 3 . 4
R 1 4
2 . 2 M
V C C
R 1 9
4 7 k
P 3 . 2
Q 6
C 1 8 1 5
2.Nguyên lý hoạt động :
-Mạch đồng bộ tạo ra xung để điều khiển tín hiệu kích và áp xoay chiều đặt lên
triac,tạo ra sự đồng bộ về tín hiệu kích và áp xoay chiều đặt vào triac
+Triac kích ở chế độ I
+
,III
+
Lớp 07CDT1_Nhóm 5 Trang 23 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
+Tín hiệu xoay chiều qua bộ opamp so sánh va BJT C1815 để lật tin hiệu.Tín hiệu
ra đưa qua VĐK nhận được và kết hợp với tín hiệu từ cảm biến sẽ điều khiển tín hiệu ở
chân P3.4 để điều khiển BJT A1015 và tạo ra dòng kích cho triac.
Nếu mức ra từ cảm biến là ở T
ôđ
min
thì P3.4=0,BJT A1015 dẫn bão hoà và tạo ra
dòng kích vào cổng G của triac,làm triac hoạt động ,từ đó nung nhiệt nóng lên. Tín hiệu
kích tồn tại ít nhất phải 2us thì triac mới bắt đầu dẫn. Góc kích α được điều chỉnh qua
VĐK bằng cách delay một khoảng thời gian so với tín hiệu nhận về ở chân P3.2 theo
sườn lên hay sườn xuống,và tín hiệu này phải nhận được sau khi có tín hiệu từ ADC là
T
ôđ
min
Nếu mức ra từ cảm biến là T
ôđ
max
thì P3.4=1,BJT A1015 ngắt và làm triac ngưng
hoạt động, từ đó nhiệt giảm dần
- Điều khiển tải AC: Ta dùng phương pháp điều khiển góc pha là phương pháp thay
đổi góc kích α của Triac để làm biến đổi điện áp đặt lên tải, khi góc kích α = 0 thì coi như
toàn bộ điện áp lưới đặt lên tải nếu như ta bỏ qua sụt áp trên Triac. Ưu điểm của phương
pháp này là điều khiển liên tục và chính xác hơn.
*Kiểm tra khối điều khiển công suất:
Lớp 07CDT1_Nhóm 5 Trang 24 6/2/2015
Thực tập công nhân GVHD: Lê Hồng Nam
-Trước tiên kiểm tra con triac đã gắn đúng chưa(dùng đồng hồ xác định chính xác
các chân của triac)
-Kiểm tra các thành phần điều khiển
-Kiểm tra nguồn cung cấp có đủ không
-Kiểm tra kích có hoạt động được không
*Nếu đóng mạch mà động cơ không chạy thì kiểm tra:
-Kiểm tra các thành phần điều khiển (kiểm tra con triac,kích có hoạt động được
không)
*Nhiệt độ không ổn định được thì kiểm tra gì?
Nếu nhiệt độ hiển thị không ổn định được thì kiểm tra:
-Điều khiển theo phương pháp góc pha:
+Đo xung kích ở một nhiệt độ nào đó,đẩy ra 1 xung kích xem nhiệt độ thay đổi như
thế nào?
* Phương pháp thực hiện mạch i n
Sau khi vẽ hoàn chỉnh sơ đồ mạch in trên giấy, chúng ta bước sang giai đoạn
thực hiện mạch in. Trình tự thực hiện tiến hành theo các bước sau:
Bước 1: Dùng giấy nhám nhuyễn đánh sạch lớp oxit hóa đang bám trên tấm mạch
in (phía có tráng lớp đồng), trước khi vẽ các đường mạch.
Bước 2: Tạo đường mạch in trên mặt đồng có các phương pháp sau:
- In mạch in đã vẽ ra giấy để in lụa hoặc ép nhiệt để tạo mạch in trên mặt đồng.
- Dùng viết lông có dung môi acetone để vẽ nối các đường mạch trên mặt đồng (dựa
theo các điểm pointou vừa định vị và sơ đồ mạch đã vẽ trước trên giấy).
Trong khi vẽ ta chú ý, có hai phương pháp để vẽ điểm pad hàn trên mạch in. Điểm
pad hàn có thể vẽ theo hình tròn hoặc hình vuông. Thông thường điểm pad tròn dễ thực
hiện nhưng lại kém tính mỹ thuật hơn điểm pad vuông.Muốn thực hiện điểm pad vuông,
ta có thể dùng viết tô rộng (quanh vị trí cầntạo điểm pad vuông), sau đó dùng đầu mũi dao
nhọn và thước kẻ tỉa bớt mực để duy trì một vùng mực bám hình vuông cho điểm pad cần
thực hiện. Công việc này đòi hỏi nhiều thời gian và sự tỉ mỉ khi thực hiện.
- Sau khi đã tạo các đường mạch trên mặt đồng của mạch in, ta quan sát xem có vị
trí nào bị vẽ không liền nét, độ đậm của các đường phải đều nhau, đồng thời không bỏ sót
đường mạch nào cả. Trong trường hợp cần thiết, sinh viên phải chờ cho mực khô hẳn rồi
đồ lại một lần nữa.
Bước 3: Sau khi vẽ hoàn chỉnh, sinh viên chờ khô mới mang mạch in nhúng vào
thuốc tẩy. Hóa chất tẩy sẽ ăn mòn lớp đồng tại các vị trí không bám mực và sẽ để nguyên
lớp đồng tại các vị trí được bao phủ bằng các đường vẽ mực. Khi nhúng mạch in trong
Lớp 07CDT1_Nhóm 5 Trang 25 6/2/2015