VCM 2012 11 Đề xuất phương pháp kích từ cho máy phát đồng trục sử dụng máy điện dị bộ nguồn kép trong trạm phát điện tàu thủy A novel excitation method for shaft generators using doublyfed induction machines on power –station on shipboards
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (395.86 KB, 8 trang )
Tuyển tập công trình Hội nghị Cơ điện tử toàn quốc lần thứ 6 67
Mã bài: 16
Đề xuất phương pháp kích từ cho máy phát đồng trục sử dụng
máy điện dị bộ nguồn kép trong trạm phát điện tàu thủy
A novel excitation method for shaft generators using doubly-
fed induction machines on power –station on shipboards
Th.S Nguyễn Trọng Thắng
Đại học Dân lập Hải Phòng, e-Mail:
PGS,TS. Nguyễn Tiến Ban
Đại học Hải Phòng, e-Mail:
Tóm tắt:
Bài báo đề xuất một phương pháp kỹ thuật mới cho hệ thống điều khiển máy điện dị bộ nguồn kép làm máy
phát đồng trục trong trạm phát điện Tàu thủy. Trong bài báo, các tác giả sử dụng một máy điện dị bộ rotor dây
quấn có cấu tạo tương tự như máy phát dị bộ nguồn kép nhưng công suất nhỏ để tạo ra tín hiệu đồng dạng
trong rotor. Các tín hiệu đồng dạng cảm ứng được tạo ra làm cơ sở để xây dựng phương thức điều khiển với
các dòng điều khiển trong rotor máy phát hoàn toàn đồng dạng với tín hiệu điều khiển. Với đề xuất này, nhóm
tác giả đã xây dựng được một mô hình đối tượng có kết cấu đơn giản, dễ thực hiện điều khiển do các thành
phần công suất tác dụng P và phản kháng Q của máy phát cung cấp cho lưới điện sẽ phụ thuộc riêng rẽ thông
qua hai hệ số K
p
và K
q
. Ngoài ra, do vector từ thông của máy phát được tạo ra bởi các dòng điện liên tục nên
dạng điện áp ra của máy phát là tín hiệu liên tục và sin chuẩn.
Abstract:
This paper proposes a novel technique for the control system of the shaft generator using doubly-fed
induction machine on power-station on shipboards. Another doubly-fed machine which is similar to the
machine working in the generator but has a smaller capacity is used to create the similarizing sine-waves in the
rotor of the generator, which are similar to the control signals. Based on this method, a simple but effective
controller is designed, which ensures to decouple the active and reactive power supplied to the grid by using
two separate parameters K
p
and K
q
. Moreover, since the magnetic flux vector of the generator is generated by
continuous currents, the output voltages are in continuous sine-wave form.
Ký hiệu
Ký hiệu Đơn vị Ý nghĩa
f
r
f
s
uu ,
V Véc tơ điện áp stato, điện áp
rotor thuộc hệ tọa độ dq
f
r
f
s
ii ,
A Véc tơ dòng điện stato, dòng
điện rotor thuộc hệ tọa độ dq
f
r
f
s
,
Wb Véc tơ từ thông stator, rotor
thuộc hệ tọa độ dq
r
s
r
r
ii ,
V Véc tơ dòng điện rotor, stato
thuộc hệ tọa độ rotor
s
s
u
V Véc tơ điện áp stato thuộc hệ
tọa độ stato
s
s
Wb Véc tơ từ thông stato thuộc hệ
tọa độ stato
r
r
u
V Véc tơ điện áp rotor thuộc hệ
tọa độ rotor
,
s r
R R
Ω
Điện trở stato, điện trở rotor
,
s r
L L
H
Điện cảm stator, rotor
m
L
H
Hỗ cảm giữa statovà rotor
,
s r
rad/s Tốc độ góc mạch điện stator,
rotor
rad/s Tốc độ góc quay của rotor
P
W Công suất tác dụng
Q
VAR Công suất phản kháng
sqsd
ii ,
A Các thành phần của vector
dòng stator trên hệ toạ độ dq
rqrd
ii ,
A Các thành phần của vector
dòng rotor trên hệ toạ độ dq
Chữ viết tắt
DFIG Máy điện dị bộ rotor dây quấn làm việc
trong chế độ máy phát cấp nguồn từ hai phía
Mở đầu
68 Nguyễn Trọng Thắng, Nguyễn Tiến Ban
VCM2012
Ngày nay, trên tầu thủy trạm phát điện luôn hướng
tới khả năng khai thác tối ưu trong hành trình trên
biển để giảm tiêu hao năng lượng, giảm thời gian
khai thác vận hành và giảm thiểu tiếng ồn, giảm ô
nhiễm môi trường, tránh tác động xấu tới con
người cũng như thiên nhiên. Vì vậy, với các tàu
trọng tải lớn, trạm phát thường được thiết kế có
các máy phát đồng trục cùng làm việc với các cụm
diesel – generator (DG). Hệ thống máy phát đồng
trục (SG – Shaft Generator) đã có rất nhiều
phương án kĩ thuật thoả mãn các yêu cầu vận
hành, khai thác [1]. Tuy nhiên khi tốc độ máy
chính (ME) thay đổi theo tình huống trên biển thì
khả năng mất đồng bộ giữa máy phát đồng trục và
lưới điện là rất lớn, để giải quyết vấn đề này ta sử
dụng máy điện dị bộ rotor dây quấn làm việc trong
chế độ máy phát cấp nguồn từ hai phía (DFIG:
Doubly – Fed Induction Generator). DFIG làm
máy phát đồng trục có những ưu điểm rất nổi bật
là stator của DFIG được nối trực tiếp với lưới điện,
còn rotor nối với lưới qua thiết bị điện tử công suất
điều khiển được. Chính vì thiết bị điều khiển cho
DFIG nằm ở rotor nên công suất thiết bị điều
khiển chỉ xấp xỉ bằng 1/3 công suất máy phát và
dòng năng lượng thu được chảy trực tiếp từ stator
sang lưới. Tuy nhiên, kỹ thuật khiển roto của
DFIG rất khó khăn, một số các công trình trong
nước [4][5] và trên thế giới đã giải quyết được vấn
đề này thông qua phương pháp kỹ thuật điều chế
véc tơ không gian cho mạch rotor [3]. Sau đây
nhóm tác giả xin đề xuất một phương pháp kỹ
thuật mới là phương pháp dựa trên kỹ thuật đồng
dạng tín hiệu mạch cảm ứng rotor, sơ đồ cấu trúc
như sau:
H.1 Cấu trúc hệ thống phát điện dị bộ nguồn kép
bằng kỹ thuật đồng dạng tín hiệu mạch cảm ứng
rotor
Hệ thống gồm:
Máy chính ME có trục được nối đồng trục với
máy điện 1 (MĐ1) và máy điện 2 (MĐ2)
Máy điện 1: là máy điện dị bộ nguồn kép công
suất nhỏ có tác dụng tạo tín hiệu suất điện
động cảm ứng đồng dạng ở rotor
Khâu đồng dạng và cách ly sức điện động rotor
của máy điện 1: là mạch khuếch đại tín hiệu sử
dụng khuếch đại thuật toán với trở kháng đầu
vào vô cùng lớn
Khâu điều chế điện áp (dòng điện) rotor cho
máy điện 2
Máy điện 2: là máy phát dị bộ nguồn kép có tác
dụng phát ra điện áp hòa với lưới điện tầu
thủy.
Máy điện 1 và máy điện 2 được nối cứng trục với
nhau sao cho các tọa độ góc của các cuộn dây
rotor và stator trùng với nhau.
1. Nguyên lý hoạt động của hệ thống
Máy điện 1 có stato được nối trực tiếp với lưới
điện tàu thủy, các cuộn dây stato của máy điện 1
kín mạch nên sẽ có dòng điện chạy qua, các dòng
điện sẽ sinh ra từ trường quay với tốc độ ω
s
bằng
với tốc độ góc của điện lưới.
Rotor của máy điện 1 có trục được nối cứng với
trục của máy chính đang quay với tốc độ ω, cuộn
dây rotor của máy 1 hở mạch nên không có dòng
điện chạy qua, sức điện động của rotor được sinh
ra hoàn toàn bởi từ thông của stator cảm ứng sang.
Từ trường stator quay với tốc độ góc ω
s
, rotor
quay với tốc độ góc ω nên từ trường stator quay so
với các cuộn dây rotor vận tốc góc là ω
r
=ω
s
-ω, do
vậy suất điện động cảm ứng ở các cuộn dây rotor
máy điện 1 có tần số góc là ω
r
.
Tín hiệu sức điện động sinh ra ở rotor của máy
điện 1 được đưa tới khâu đồng dạng, khâu này có
tác dụng tạo tín hiệu đầu ra đồng dạng với tín hiệu
đầu vào nhưng cách ly với tín hiệu đầu vào đó, tức
là dòng tải của tín hiệu đầu ra sẽ không gây ảnh
hưởng méo hay nhiễu cho tín hiệu đầu vào.
Đầu ra của khâu đồng dạng đưa tới khâu điều chế
dòng điện để cấp điện cho các cuộn dây rotor của
máy điện 2, các thành phần dòng rotor này được
tính toán và xây dựng trên cơ sở tín hiệu đồng
dạng ở đầu ra của khâu cách ly nhưng pha và biên
độ sẽ được thay đổi và điều chỉnh để phù hợp với
các yêu cầu của hệ thống phát điện.
Vậy các thành phần dòng điện rotor của máy điện
2 cũng có tần số là ω
r
= ω
s
- ω, các dòng điện này
sinh ra từ trường quay so với rotor vận tốc góc
ω
r
=ω
s
-ω.
Vì trục của rotor máy điện 2 cũng được nối với
trục của máy chính và cùng quay với vận tốc góc
ω, nên từ trường của rotor máy điện 2 quay so với
các cuộn dây stator vận tốc góc là (ω
s
-ω)+ω=ω
s
.
Tuyển tập công trình Hội nghị Cơ điện tử toàn quốc lần thứ 6 69
Mã bài: 16
Từ trường này sẽ sinh ra sức điện động cảm ứng ở
phía stator của máy điện 2 với tốc độ góc ω
s
trùng
với tốc độ góc ω
s
của lưới điện.
Vấn đề còn lại là biên độ và pha điện áp đầu ra của
máy điện 2 như thế nào? có trùng với lưới điện
không? nhóm tác giả sẽ làm rõ vấn đề này khi
phân tích và triển khai cụ thể mô hình toán các
khâu trong hệ thống.
2. Xây dựng mô hình toán hệ thống
Vì trong hệ thống có 2 máy điện dị bộ nguồn kép
nên các đại lượng và thông số của các máy điện
được ký hiệu để phân biệt như sau:
Y
x
, trong đó Y
là đại lượng, thông số, còn x là chỉ số máy điện. Ví
dụ:
R
1
là điện trở của máy điện 1,
L
2
là điện cảm
của máy điện 2.
Theo [3], phương trình mô tả máy điện dị bộ
nguồn kép trên hệ tọa độ tựa theo điện áp lưới, ứng
dụng cho máy điện 1 có hệ phương trình sau:
),,,.1(
)(
.
)(
.
1
1
1
11
1
1
1
11
1
1
1
1
1
1
1
1
1
1
dcba
LiLi
LiLi
j
dt
d
iRu
j
dt
d
iRu
r
f
rm
f
s
f
r
m
f
rs
f
s
f
s
f
r
r
f
r
f
r
r
f
r
f
s
s
f
s
f
ss
f
s
Vì rotor của máy điện 1 hở mạch nên
f
r
i
1
= 0 thay
vào phương trình (1c) và (1d) ta có từ thông của
stator và rotor như sau:
),.2(
.
.
1
11
1
11
ba
Li
Li
m
f
s
f
r
s
f
s
f
s
Thay
0
1
f
r
i
và các phương trình từ thông vào
phương trình (1a) và (1b), ta có phương trình điện
áp ở stator và rotor máy điện 1 như sau:
),.3(
)(
)(
1
1
1
1
1
1
1
1
1
1
1
1
ba
iLj
dt
id
Lu
iLj
dt
id
LiRu
f
s
mr
f
s
m
f
r
f
sss
f
s
s
f
ss
f
s
Tương tự tập hợp hệ phương trình mô tả máy điện
dị bộ nguồn kép trên hệ tọa độ quay tựa theo điện
áp lưới cho máy điện 2, có hệ phương trình sau:
),,,.4(
)(
.
)(
.
2
2
2
22
2
2
2
22
2
2
2
2
2
2
2
2
2
2
dcba
LiLi
LiLi
j
dt
d
iRu
j
dt
d
iRu
r
f
rm
f
s
f
r
m
f
rs
f
s
f
s
f
r
r
f
r
f
r
r
f
r
f
s
s
f
s
f
ss
f
s
Để có kết quả mô hình toán thuận lợi cho quá trình
điều khiển sau này, cần phải xét hệ thống ở chế độ
không tải và chế độ có tải của máy phát.
2.1 Chế độ không tải của máy phát
Trường hợp máy điện 2 chưa có tải, tức là chưa có
dòng điện bơm ra ở sator của máy phát hay
0
2
f
s
i
và dòng điện rôto lúc này là
f
r
f
r
ii
0
22
,
thay
0
2
f
s
i
và
f
r
f
r
ii
0
22
vào phương trình (4c) và
(4d) nhận được từ thông stator và rotor như sau:
),.5(
.
.
2
0
22
2
0
22
ba
Li
Li
r
f
r
f
r
m
f
r
f
s
Thay các giá trị từ thông này vào phương trình
(4a) và (4b) ta có phương trình điện áp của stator
và rotor của máy điện 2 như sau:
),.6(
)(
)(
.
0
2
2
0
2
2
0
2
2
2
0
2
2
0
2
2
2
ba
iLj
dt
id
LiRu
iLj
dt
id
Lu
f
r
rr
f
r
r
f
r
r
f
r
f
rms
f
r
m
f
s
Điện áp ra rotor của máy điện 1 (ở phương trình
3b), qua khâu đồng dạng và cách ly tạo điện áp là
f
cl
u
như sau:
)7()
)(
(.
1
1
1
1
1 f
smr
f
s
mcl
f
rcl
f
cl
iLj
dt
id
LKuKu
Ở khâu điều chế điện áp rotor cho máy điện 2, bù
thêm thành phần
f
rr
iR
0
2
2
.
, vậy điện áp đưa vào
rotor của máy điện 2 lúc này sẽ là:
)8()
)(
(.
.
1
1
1
1
0
2
2
0
2
2
11
f
smr
f
s
mcl
f
rr
f
rr
f
cl
f
r
iLj
dt
id
LKiR
iRuu
So sánh với phương trình điện áp rotor của máy
điện 2 ở phương trình (6b) ta có:
f
rrr
f
r
r
f
rr
f
smr
f
s
mcl
f
rr
iLj
dt
id
LiR
iLj
dt
id
LKiR
0
2
2
0
2
2
0
2
2
1
1
1
1
0
2
2
)(
)
)(
.(.
=>
f
s
f
r
iKi
1
120
2
.
(với
rmcl
LLKK
21
12
/.
) (9)
Thay
f
s
f
r
iKi
1
120
2
.
vào phương trình điện áp stator
của máy phát (6a) nhận được:
70 Nguyễn Trọng Thắng, Nguyễn Tiến Ban
VCM2012
)10()
)(
.(
1
2
1
2
12
2 f
sms
f
s
m
f
s
iLj
dt
id
LKu
Nghiên cứu lại phương trình (3a) là phương trình
điện áp stator của máy điện 1:
)3(
)(
1
1
1
1
1
1
1
aiLj
dt
id
LiRu
f
sss
f
s
s
f
ss
f
s
Ta có nhận xét như sau:
f
s
u
1
chính điện áp của lưới điện
Máy điện 1 có rotor hở mạch nên không có từ
trường phần ứng, không có phản ứng phần ứng
và tất cả các đại lượng và thông số trong
phương trình (3a) đều là cố định nên độ lệch
pha của thành phần điện
áp:
f
sss
f
s
s
f
sl
iLj
dt
id
Lu
1
1
1
1
1
)(
.
so với điện
áp:
f
sss
f
s
s
f
ss
f
s
iLj
dt
id
LiRu
1
1
1
1
1
1
1
)(
của
lưới là cố định
So sánh thành phần điện áp
f
sss
f
s
s
f
sl
iLj
dt
id
Lu
1
1
1
1
1
)(
.
với điện áp đầu
ra của của máy điện 2:
)
)(
.(
1
2
1
2
12
2 f
sms
f
s
m
f
s
iLj
dt
id
LKu
Ta
thấy
constLLKuu
sm
f
sl
f
s
12
12
12
/./
, vậy
f
s
u
2
trùng pha với thành phần
f
sl
u
1
Tới đây ta có các kết quả quan trọng ở chế độ
không tải của máy phát như sau:
Điện áp đầu ra của máy phát luôn lệch pha so
với điện áp lưới một góc α=const và hoàn toàn
không phụ thuộc vào tốc độ lai của máy chính.
Vì độ lệch pha với góc α là cố định nên để giải
quyết việc triệt tiêu góc lệch pha này ta chỉ cần
xoay lệch trục máy điện 1 và máy điện 2 một
góc α để bù lại sự lệch pha hoặc thậm chí
thành phần
f
ss
iR
1
1
.
quá nhỏ so với điện áp lưới
nên ta có thể bỏ qua không cần hiệu chỉnh.
Biên độ điện áp đầu ra của máy phát có thể
điều chỉnh hoàn toàn tuyến tính thông qua K
cl
.
Giả thiết để biên độ đầu ra của máy phát trùng
với biên độ điện áp lưới ta phải chỉnh giá trị
K
cl
= K
0
, cụ thể có thể tìm K
0
từ hệ phương
trình
),.11(
/.
1/./
21
12
12
12
12
ba
LLKK
LLKuu
rmcl
sm
f
sl
f
s
=>
)12()./().(/.
212112
120 mmrsmr
LLLLLLKK
Như vậy có thể kết luận: trong trường hợp máy
phát chưa có tải, để điện áp đầu ra của máy phát
trùng pha, trùng biên độ, trùng tần số với lưới ta
thực hiện các khâu hiệu chỉnh và điều chỉnh sau:
Giải quyết vấn đề trùng tần số giữa điện áp ra
của máy phát với điện áp của lưới điện: ta thấy
luôn được thỏa mãn (theo phần 1).
Giải quyết vấn đề về trùng pha giữa điện áp
máy phát và điện áp lưới: ta xoay lệch trục
không gian giữa máy điện 1 và máy điện 2
một góc α để bù lại phần lệch pha.
Giải quyết vấn đề về trùng biên độ giữa điện áp
máy phát với điện áp lưới ta thực hiện 2 khâu
hiệu chỉnh:
Bù thành phần điện áp
f
rr
iR
0
2
2
.
của rotor máy
điện 2 để có mối quan hệ điện áp stato giữa
máy điện 1 và máy điện 2 là tuyến tính.
Chỉnh hệ số khuếch đại ở khâu đồng dạng
và cách ly với hệ số khuếch đại
)./().(
2121
0 mmrscl
LLLLKK
để biên độ
điện áp đầu ra của máy phát bằng biên độ
của điện áp lưới.
Thấy rằng, ba khâu hiệu chỉnh và điều chỉnh trên
đều là cố định. Sau khi thiết kế các mạch hiệu
chỉnh và điều chỉnh ở chế độ không tải, sẽ giữ
nguyên cấu trúc các khâu đó trong các chế độ có
tải sau này, gọi là các khâu hiệu chỉnh không tải.
Như vậy mô hình hệ thống ở chế độ không tải như
hình 2:
H.2 Sơ đồ khối mô hình hệ thống khi không có tải
với mạch công suất nguồn áp
Từ mô hình trên thấy rằng có khâu tạo dòng
f
r
i
0
2
,
cần phân tích cấu tạo của khâu tạo dòng
f
r
i
0
2
này.
Vì rotor máy điện 1 hở mạch nên không có dòng
chạy qua (hay
r
r
i
1
=0)=> Phương trình điện áp roto
của máy điện 1 trên tọa độ cuộn dây roto như sau
[3]:
)13(
)(
.
)(
.
1
1
1
1
1
1
dt
id
L
dt
d
iRu
r
s
m
r
r
r
rr
r
r
Từ phương trình (9)
120
21
/ Kii
r
r
r
s
, thay
120
21
/ Kii
r
r
r
s
vào phương trình (13) =>
Tuyển tập công trình Hội nghị Cơ điện tử toàn quốc lần thứ 6 71
Mã bài: 16
)14()(
1
1
12
0
2
dtu
L
K
i
r
r
m
r
r
Từ phương trình (11.b) =>
rmcl
LLKK
21
12
/.
thay
vào phương trình (14) =>
)15()(
1
).(
1
2
1
2
0
2
dtu
L
dtuK
L
i
r
cl
r
r
rcl
r
r
r
Vậy có được khâu tạo dòng
f
r
i
0
2
như sau:
H.3 Sơ đồ khối khâu tạo
f
r
i
0
2
Với khâu tích phân được thực hiện trên tọa độ
rotor, hay khâu tích phân được thực hiện trực tiếp
trên mạch điện rotor.
Trên đây là mô hình hệ thống trên cơ sở mạch
công suất là nguồn áp. Tuy nhiên, hệ thống với
mạch công suất nguồn áp sẽ gây một số khó khăn
trong quá trình tính toán điều khiển hệ thống sau
này, vì vậy dựa vào mô hình hệ thống với mạch
công suất nguồn áp, xây dựng mô hình trên cở sở
mạch công suất nguồn dòng như hình 4:
H.4 Sơ đồ khối mô hình hệ thống khi không có tải
với mạch công suất nguồn dòng
Vấn đề về công suất:
Phương trình điện áp stator của máy phát trên tọa
độ cuộn dây stato (bỏ qua thành phần điện áp rơi
trên điện trở) như sau [3]:
dt
d
u
s
s
s
s
)(
2
2
hoặc
)16(
22 s
s
s
s
s
ju
Phương trình (16) cho thấy từ thông stator luôn
chậm pha so với điện áp stator một góc khoảng
90
0
, và thành phần dòng
f
r
i
0
2
là thành phần tạo ra
từ thông chính sinh ra điện áp ở lưới ở stator
nên
f
r
i
0
2
trùng pha với từ thông chính hay
f
r
i
0
2
chậm
pha so với điện áp stator một góc 90
0
, vậy pha
của
)(
0
2 f
r
i
chính là pha của dòng điện rotor ngang
trục theo tọa độ điện áp lưới của máy điện 2 là
rq
i
2
, và pha của dòng điện rotor dọc trục theo tọa
độ điện áp lưới
rd
i
2
sẽ chính là pha của
)(
0
2 f
r
i
trừ đi góc π/2, hay là pha của
f
r
i
0
2
cộng góc π/2.
2.2 Chế độ có tải của máy phát
Giả sử yêu cầu của máy phát là phải bơm ra lưới
điện dòng điện tải là
f
s
i
2
, ta phải điều chỉnh dòng
rotor có giá trị như sau:
f
rt
f
r
f
r
iii
2
0
22
, với
f
r
i
0
2
là
thành phần dòng điện rotor ở chế độ không tải đã
được điều chế cố định ở phần 2.1 và luôn tồn tại
sẵn ở rotor.
Như vậy ta phải điều chế thành phần dòng rotor bổ
sung
f
rt
i
2
để stator của máy phát bơm ra lưới điện
dòng
f
s
i
2
mà vẫn đảm bảo điện áp ra các cực stator
của máy phát trùng pha, trùng tần số, trùng biên độ
với lưới điện.
Thay
f
rt
f
r
f
r
iii
2
0
22
và
f
s
i
2
vào phương trình (4c),
nhận được từ thông stator của máy điện 2 như sau:
)17().(.
2
2
0
2
2
22
m
f
rt
f
rs
f
s
f
s
LiiLi
Thay từ thông stator
f
s
2
vào phương trình (4a),
điện áp đầu ra stator của máy phát như sau:
)18(
)(
.
)(
.
)(
2
2
2
0
2
2
2
2
2
0
2
2
2
2
2
2
2
m
f
rt
sm
f
r
ss
f
s
s
f
rt
m
f
r
m
f
s
s
f
ss
f
s
LijLijLij
dt
id
L
dt
id
L
dt
id
LiRu
Vì điện áp rơi trên điện trở rotor
2
s
R
có thể bỏ qua
được so với tổng điện áp rơi trên các thành phần
còn lại nên:
)19(
)(
.
)(
.
)(
.
2
2
2
0
2
2
2
2
2
0
2
2
2
2
2
m
f
rtsm
f
rss
f
ss
f
rt
m
f
r
m
f
s
s
f
s
LijLijLij
dt
id
L
dt
id
L
dt
id
Lu
Vì điện áp ra của máy phát luôn phải đảm bảo bám
điện áp lưới nên không đổi => so sánh phương
trình (19) với phương trình (6b) có được:
m
f
rt
sm
f
r
ss
f
s
s
f
rt
m
f
r
m
f
s
sm
f
rs
f
r
m
f
s
LijLijLij
dt
id
L
dt
id
L
dt
id
LLij
dt
id
Lu
2
2
2
0
2
2
2
2
2
0
2
2
2
22
0
2
0
2
2
2
)(
.
)(
.
)(
)(
.
=>
)20()./(
2
22
2 f
sms
f
rt
iLLi
=>
),.21(
)/(
)/(
2222
2222
ba
iLLi
iLLi
rtqmmsq
rtdsmsd
Vấn đề về công suất:
Công suất tác dụng và công suất phản kháng của
máy phát là:
),.22(
sin 3
cos 3
22
22
ba
IUQ
IUP
ss
ss
Với
2
U
s
,
2
I
s
là điện áp và cường độ dòng điện hiệu
dụng một pha của máy phát, φ là độ lệch pha giữa
điện áp và dòng điện trên một pha của máy phát.
72 Nguyễn Trọng Thắng, Nguyễn Tiến Ban
VCM2012
Biểu diễn véc tơ điện áp và dòng điện stato của
máy phát trên tọa độ tựa theo điện áp lưới dq quay
với vận tốc góc
s
là
f
s
u
2
và
f
s
i
2
thì góc lệch pha
giữa
f
s
u
2
và
f
s
i
2
vẫn là φ (hình 5)
, theo [3] độ dài
của véc tơ
f
s
u
2
và
f
s
i
2
(ký hiệu là
||
2 f
s
u
và
||
2 f
s
i
)
chính là biên độ của điện áp và dòng điện tức
thời
)23(2.||;2.||
2
2
2
2
s
f
ss
f
s
IiUu
Từ hình 5 =>
),,.24(
sin.||
cos.||
||
2
2
2
2
2
2
cba
ii
ii
uu
f
s
sq
f
s
sd
f
s
sd
T
hay các phương trình (24.a,b,c) và các phương
trình (23) vào các phương trình (22.a,b) có:
),25(
.).2/3(
.).2/3(
22
22
ba
iuQ
iuP
sqsd
sdsd
H.5 Véc tơ dòng điện và điện áp stato máy điện 2
trên tọa độ tựa theo điện áp lưới
Thay
2
sd
i
ở phương trình (21a) và
2
sq
i
ở phương
trình (21b) vào các phương trình (25.a,b) có:
),.26(
)/.(.).2/3(
)/.(.).2/3(
2222
2222
ba
LLiuQ
LLiuP
smrtqsd
smrtdsd
T
heo phần 2.1 ta có:
),.27(
.
.
0
22
0
22
ba
iKi
iKi
rqqrtq
rdprtd
(Với tín hiệu đồng dạng
0
2
rq
i =
f
r
i
0
2
và
0
2
rd
i là
véc tơ
f
r
i
0
2
cộng thêm góc pha π/2 đã tạo được ở
mục 2.1)
Thay
2
rtd
i
và
2
rtq
i
để tính P và Q ta có:
),.28(
.)/.( ).2/3(
.)/.( ).2/3(
22
0
22
22
0
22
ba
YKLLiuKQ
XKLLiuKP
qsmrqsdq
psmrdsdp
Với X, Y là các thành phần cố định vì trong tọa độ
quay theo điện áp lưới thì các thành phần
2 2 2
0 0
, ,
sd rd rq
u i i
đều cố định.
Vậy để điều chỉnh công suất tác dụng P của máy
phát bơm ra lưới điện ta chỉ cần điều chỉnh hệ số
khuếch đại K
p
, điều chỉnh công suất phản kháng Q
của máy phát bơm ra lưới điện ta chỉ cần điều
chỉnh hệ số khuếch đại K
q
.
Sau đây là sơ đồ khối mô hình của hệ thống với
mạch công suất là nguồn dòng:
H.6 Mô hình hệ thống khi có tải với mạch công
suất rotor là nguồn dòng
Thấy rằng các thành phần công suất P, và Q hoàn
toàn tỉ lệ với các hệ số khuếch đại K
p
, và K
q
, như
vậy có thể điều chỉnh dễ dàng các thành phần công
suất của máy phát bơm ra tải bằng cách thay đổi
các hệ số K
p
, và K
q
.
3. Kết quả mô phỏng
Nhóm tác giả thực hiện chạy mô phỏng các tín
hiệu ở mạch stato trên hệ tọa độ stator và các tín
hiệu ở mạch rotor trên hệ tọa độ rotor, tức là các
tín hiệu điện áp và dòng điện thu được là tín hiệu
trực tiếp trên các cuộn dây stator và rotor.
3.1 Chế độ không tải
Khi không tải, stato của máy phát hở mạch, kết
quả mô phỏng chế độ không tải được thể hiện ở
hình 7. Khi tốc độ quay
r
của rotor (đường 1)
thay đổi từ 20 vòng/s, sang 30 vòng/s thì tín hiệu
điện áp đồng dạng rotor
cl
u của máy điện 1 (đường
2) thay đổi tần số từ 30 hz về 20 hz, đồng thời biên
độ cũng giảm theo. Dòng điện điều khiển không
tải của rotor pha a là
ar
i
0
2
(đường 3) có biên độ
không thay đổi, nhưng tần số thay đổi từ 30hz về
20hz và theo [2] thì
f
r
i
0
2
sẽ không thay đổi. Điện
áp pha a của máy phát
sa
u (đường 5) luôn đáp ứng
trùng pha, trùng tần số, trùng biên độ với điện áp
pha a của lưới
La
u (đường 4).
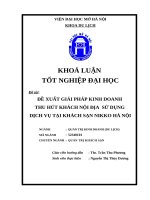
3.2 Chế độ có tải
Ở chế độ có tải, điện áp ra của máy phát được hòa
với lưới điện, kết quả mô phỏng được thể hiện ở
hình 8.
Tuyển tập công trình Hội nghị Cơ điện tử toàn quốc lần thứ 6 73
Mã bài: 16
Ta cho hệ số điều khiển công suất tác dụng K
p
(đường 1) thay đổi từ giá trị 0.5 sang 1 tại thời
điểm t = 0.4s và cho về 0 tại thời điểm t = 0.5s. Hệ
số điều khiển công suất phản kháng K
q
(đường 2)
cho thay đổi từ 0 lên 2 tại thời điểm t = 0.6s và lên
4 tại thời điểm t = 0.7s. Điện áp pha a của lưới
La
u (đường 3) có tần số f = 50hz, biên độ 220V.
Ta có kết quả dòng điện pha a của máy phát cung
cấp ra lưới
sa
i (đường 4) như sau:
Trong thời gian t < 0.5s : dòng điện pha a của
máy phát cung cấp ra lưới đồng pha với điện
áp lưới (tức là phát công suất tác dụng ra lưới)
và dòng tăng biên độ gấp đôi khi K
p
tăng giá
trị lên gấp đôi (tại t=0.4s).
Trong khoảng thời gian 0.5s < t < 0.6s: dòng
điện pha a của máy phát cung cấp ra lưới xấp
xỉ bằng 0 do các hệ số điều khiển công suất K
p
và K
q
đều bằng 0.
Trong thời gian t > 0.6s: Dòng điện pha a của
máy phát cung cấp ra lưới nhanh pha hơn điện
áp lưới 90
0
(tức là phát ra công suất phản
khảng ra lưới) và dòng tăng biên độ gấp đôi
khi K
q
tăng giá trị lên gấp đôi (tại t=0.7s).
H.7 Kết quả mô phỏng không tải
H.8 Kết quả mô phỏng có tải
Kết luận
Phương pháp kích từ mà nhóm tác giả đề xuất đã
đáp ứng được rất tốt các vấn đề trùng pha, trùng
biên độ, trùng tần số giữa điện áp ra của máy phát
với điện áp lưới.
74 Nguyễn Trọng Thắng, Nguyễn Tiến Ban
VCM2012
Trong quá trình khảo sát cho thấy tín hiệu điện áp
đồng dạng sẽ phản ứng tức thời khi điện áp lưới
hoặc tốc độ rotor thay đổi. Vì vậy, phương pháp
điều khiển dựa trên tín hiệu đồng dạng sẽ cho kết
quả điện áp đầu ra luôn bám theo điện áp lưới
ngay cả khi điện áp lưới hay tốc độ rotor của DFIG
thay đổi. Do đó, mô hình này rất phù hợp ứng
dụng trong máy phát đồng trục để hòa với lưới
điện trên tầu thủy vì lưới điện tầu thủy là lưới
“mềm”, điện áp thường xuyên bị đổi và tốc độ
máy chính ME cũng thường xuyên thay đổi theo
các tính huống trên biển.
Mô hình có các khâu điều khiển các thành phần
công suất cung cấp ra lưới điện rất đơn giản và
hiệu quả: thành phần công suất tác dụng P tỷ lệ với
hệ số K
p
, thành phần công suất phản kháng Q tỷ lệ
thuận với hằng số K
q
, vì vậy việc thiết kế bộ khiển
các thành phần công suất sau này sẽ rất đơn giản.
Bộ điều khiển trong mô hình không phải tính toán
nhiều nên không cần chọn chip điều khiển cấu
hình cao, dẫn đến hạ giá thành bộ điều khiển của
hệ thống.
Các mạch trong hệ thống đều là các mạch liên tục
nên kết quả điện áp ra của máy phát hoàn toàn liên
tục và sẽ có dạng sin chuẩn.
Tài liệu tham khảo
[1] GS.TSKH Thân Ngọc Hoàn; TS. Nguyễn Tiến
Ban, Trạm phát và lưới điện tàu thủy, Nhà xuất
bản Khoa học và kỹ thuật, 2008.
[2] GS.TSKH Thân Ngọc Hoàn, Mô phỏng hệ
thống điện tử công suất và truyền động điện,
Nhà xuất bản xây dựng, 2002.
[3] GS.TSKH Nguyễn Phùng Quang, Điều khiển tự
động truyền động điện xoay chiều ba pha, Nhà
xuất bản Giáo dục, 1998.
[4] Cao Xuân Tuyển, Tổng hợp các thuật toán phi
tuyến trên cơ sở phương pháp Backstepping để
điều khiển máy điện dị bộ nguồn kép trong hệ
thống máy phát điện sức gió, Luận án tiến sỹ kỹ
thuật, 2008.
[5] Đặng Danh Hoằng, Cải thiện chất lượng điều
khiển máy phát không đồng bộ nguồn kép dùng
trong hệ thống phát điện chạy sức gió bằng
phương pháp điều khiển phi tuyến, Luận án tiến
sỹ kỹ thuật 2012.
PGS.TS. Nguyễn Tiến Ban: Nhận bằng kỹ sư
Điện Tàu thủy tại trường Đại Học Hàng Hải Việt
nam 1981, Tiến sĩ Kỹ thuật tại Đại học Bách khoa
Hà Nội 2005. Hiện là Chủ nhiệm
khoa Khoa học Tự Nhiên Đại
học Hải Phòng. Lĩnh vực nghiên
cứu chính là Tự động hóa và
Điều khiển, lĩnh vực chuyên sâu:
Tàu thủy.
Nguyễn Trọng Thắng sinh năm
1982, nhận bằng Kỹ sư Điện
chuyên ngành Điều khiển tự
động tại Đại học Bách khoa Hà Nội năm 2005,
nhận bằng Thạc sỹ Kỹ thuật
ngành Tự động hóa tại Trường
Đại Học Hàng hải Việt Nam
năm 2009, bắt đầu làm Nghiên
cứu sinh ngành Tự động hóa tại
trường Đại học Giao thông vận
tải Hà Nội từ năm 2011. Hiện
đang là giảng viên khoa Điện-
Điện tử trường Đại học Dân lập Hải Phòng, lĩnh
vực nghiên cứu chính là Điều khiển tự động và các
trạm phát điện trên tầu thủy.