Mạch đo nhiệt độ và cảnh báo
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (312.01 KB, 20 trang )
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
KHOA ĐIỆN TỬ VIỄN THÔNG
00O00
BÁO CÁO BÀI TẬP LỚN MÔN VI XỬ LÝ
ĐỀ TÀI
MẠCH ĐO NHIỆT ĐỘ VÀ CẢNH BÁO
Thầy giáo hướng dẫn: ThS. Hàn Huy Dũng
Sinh Viên thực hiện:
Nguyễn Thọ Lợi
Đặng Đình Tài
Nguyễn Huy Hoàng
Ngô Thanh Xuân
Đặng Đức Cường
Lớp : ĐT2-K48
Hà Nội 05-2006
Chc nng ca ti
o v hin th nhit ca mụi trng mt im bt k trong
khong -40
0
C n 100
0
C
Bỏo ng khi nhit ca mụi trng trong mt khong no ú m
ta chn
PHN M U
GII THIU VK 8 BT PIC16F877 V SO SNH
VI VK 8051
Ngày
nay,
các
bộ
vi
điều
khiển
đa
ng
có
ứng
dụng
ngày
càng
rộng
ri
trong
các
lĩnh
vực
kỹ
t
huậ
t
và
đời
sống
x
hội,
đặc
biệt
l
à
trong
kỹ
thuật
tự
động
hoá
và
điều
khiển
từ
xa.
Giờ
đây
với
nhu
cầu
chuyên
dụng
hoá,
tối
u
(thời
gian,
không
gian,
giá
thành),
bảo
mật,
tính
chủ
động
trong
công
vi
ệc...
ngày
càng
đòi
hỏi
khắt
khe.
Việc
đ
a
ra
công
nghệ
mới
trong
lĩnh
vự
c
chế
tạo
mạch
điện
tử
để
đáp
ứng
những
yêu
cầu
trên
là
hoàn
toàn
cấp
thiết
mang
tính
thực
tế
cao.
Khái
niệm
về
bộ
vi
đ
i
ều
khiển
Để
hiểu
khái
niệm
về
bộ
vi
điều
khiển
,
ta
có
thể
làm
phép
so
sánh
nó
với
bộ
vi
xử
lý
công
dụng
chung
nh
sau:
Ta
biết
rằng,
các
bộ
vi
xử
lý
công
dụng
chung
nh
họ
Intel
x86
(8086,
80286,
80386,
80486
và
Penti
um)
hoặc
họ
Motorola
680x0(6800,
68010,
68020,
68030,
68040
vv...)
không
có
RAM,
ROM
và
không
có
các
cổng
ra
v
à
o
trên
chip...
Với
lý
do
đó
mà
chúng
đ
ợc
gọi
l
à
các
bộ
vi
xử
lý
công
dụng
chung.
Một
nhà
thiết
kế
hệ
thống
sử
dụng
một
bộ
vi
xử
lý
công
dụng
chung
chẳng
hạn
nh
P
entium
hay
68040
sẽ
phải
bổ
xung
th
êm
RAM,
ROM,
các
cổng
vào
ra
và
các
bộ
định
thời
ngoài
để
làm
cho
chúng
hoạt
động
đ
ợc.
Mặc
dù
việc
bổ
xung
các
RAM,
ROM,
các
cổng
vào
ra
sẽ
làm
cho
hệ
thống cồng
kềnh
lên
nh
ng
nó
lại
có
u
đi
ểm
khi
sử
dụng
các
bộ
vi
xử
lý
này
là
rất
linh
hoạt
.
Chẳng
hạn
nh
ng
ời
th
iết
kế
có
thể
quyết
định
về
số
l
ợng
RAM,
ROM,
và
các
cổng
vào
ra
cần
thiết
sao
cho
p
hù
hợp
với
khả
năng,
mục
đích
sử
dụng
của
hệ
thống.
Điều
này
không
thể
có
đối
với
các
bộ
vi
điều
khiển.
Bởi
vì,
một
bộ
vi
đi
ều
khiển
đ
có
một
CPU
(một
bộ
vi
xử
lý)
cùng
với
một
số
l
ợng
RAM,
ROM,
các
cổng
vào
ra
và
một
bộ
định
thời
trên
c
ùng
một
chíp.
Hay
nói
cách
khác
là
bộ
vi
xử
lý,
RAM,
ROM,
các
cổng
vào
ra
và
một
bộ
định
thời
cùng
đ
ợc
nhúng
trê
n một
chip.
Do
vậy
ng
ời
thiết
kế
không
th
ể
bổ
xung
thêm
bộ
nhớ
ngoài,
số
các
cổng
vào
ra
hoặc
bộ
định
thời
cho
nó.
Với
số
l
ợng
RAM,
ROM
và
số
các
cổng
vào
ra
cố
định
nh
vậy
là
một
mặt
hạn
chế
(kém
linh
hoạt)
x
ong
nó
lại
thật
sự
lý t
ởng
đối
với
những
ứng
dụng
mang
tính
chuyên
bi
ệt,
tối
u
về
giá
thành,
tối
u
về
không
gian...
Hiện
nay
trên
thị
truờng
có
các
bộ
vi
đi
ều
khiển
8
bít
chính
là.
6811
của
Motorola,
8051
của
Intel,
Z8
của
Xilog
và
Pic16x
của
Microchip
Technology.
Mỗi
loại
trên
đây
đều
có
một
t
ập
lệnh
và
thanh
ghi
riêng
duy
nhất,
nên
chúng
đều
không
t
ơng
thíc
h
lẫn
nhau.
Cũng
có
những
bộ
vi
điều
khi
ển
16
bít
và
32
bít
đ
ợc
sản
xuất
ra
bởi
các
hng
sản
xuất
chíp
khác
nhau.
Những
yêu
cầu
để
lựa
chọn
một
bộ
vi
điều
khiển
là:
+
Đáp
ứng
nhu
cầu
tí
nh
toán
của
bài
toán
một
cách
hiệu
quả
về
mặt
giá
thành
và
đầy
đủ
chức
năng
có
thể
nhìn
thấy
đ
ợc,
(khả
dĩ).
+
Có
sẵn
các
công
cụ
phát
triển
phần
mềm
chẳng
hạn
nh
các
trình
biên dịch
trình
hợp
ngữ
và
gỡ
rối.
+
Nguồn
các
bộ
vi
điều
khiển
có
sẵn
nhiều
và
tin
cậy.
Các
tiêu
chuẩn
l
ựa
chọn
một
bộ
vi
điều
khiển:
Tiêu
chuẩn
đầu
tiên
và
tr
ớc
hết
trong
lựa
chọn
một
bộ
vi
đi
ều
khiển
là
nó
phải
đáp
ứng
nhu
cầu
bài
toán
về
mặt
công
suất
tí
nh
to
án,
giá
thành
và
hiệu
quả.
Trong
khi
phân
tích
các
nhu
cầu
của
một
dự
án
dựa
trên
bộ
vi
điều
khiển,
chúng
ta
tr
ớc
hết
phải
biết
là
bộ
vi
đi
ều
khiển
nà
o
là
8
bít,
16
bít
hay
32
bít
có
th
ể
đáp
ứng
tốt
nhất
nhu
cầu
tính
toán
của
bài
toán
một
cách
hiệu
quả
nhất.
+
Những
tiêu
chuẩn
đ
ợc
đ
a
ra
để
cân
nhắc
là:
+
Tốc
độ:
Tốc
độ
lớn
nhất
mà
bộ
vi
điều
khiển
hỗ
trợ
là
bao
nhiêu.
+
Kiểu
đóng
vỏ:
Đó
là
kiểu
40
chân
DIP
hay
QFP
hay
là
kiểu
đóng
vỏ
khá
c.
Đây
là
điều
quan
trọng
đối
với
yêu
cầu
về
không
gian,
kiểu
lắp
ráp
và
tạo
mẫu
thử
cho
sản
phẩm
cuối
cùng.
+
Công
suất
tiêu
thụ:
Điều
này
đặc
bi
ệt
khắt
khe
đối
với
những
sản
phẩm
dùng
pi
n,
ắc
quy.
+
Dung
l
ợng
bộ
nhớ
RAM
và
ROM
trên
chíp.
+
Số
chân
vào
ra,
bộ
định
thời,
số
ngắt
trên
chíp.
+
Khả
năng
dễ
dàng
nâng
cấp
cho
hiệu
su
ất
cao
hoặc
giảm
công
suất
tiêu
thụ.
+
Giá
thành
cho
một
đơn
vị:
Điều
này
quan
trọng
quyết
định
gi
á
thành
cuối
cùng
của
sản
phẩm
mà
một
bộ
vi
điều
khiển
đ
ợc
sử
dụng.
Bộ
Vi
điều
khiển
8
bit
PIC16F877
Đặc
tính
nổi
bật
của
bộ
vi
xử
lí.
+
Sử
dụng
công
nghệ
tích
hợp
cao
RISC
CPU.
+
Ng
ời
sử
dụng
có
thể
lập
trình
với
35
câu
lệnh
đơn
giản.
+
Tất
cả
các
câu
lệnh
thực
hiện
trong
một
chu
kì
lệnh
ngoại
trừ
một
số
câu
lệnh
rẽ
nhánh
thực
hiện
trong
2
chu
kì
lệnh.
+
Tốc
độ
hoạt
động
l
à
:
-
Xung
đồng
hồ
vào
là
DC-
20MHz
-
Chu
kỳ
lệnh
thực
hiện
trong
200ns
+
Bộ
nhớ
ch
ơng
trình
Flash
8Kx14
words
+
Bộ
nhớ
Ram
368x8
bytes
+
Bộ
nhớ
EFPROM
256x
8
bytes
Khả
năng
của
bộ
vi
xử
lí
này
+
Khả
năng
ngắt
(
lên
tới
14
ng
uồn
ngắt
trong
và
ngắt
ngoài
)
+
Ngăn
nhớ
Stack
đ
ợc
phân
chia
làm
8
mức
+
Truy
cập
bộ
nhớ
bằng
địa
chỉ
trực
tiếp
hoặc
gián
tiếp.
+
Nguồn
khởi
động
l
ạ
i
(POR)
+
Bộ
tạo
xung
thời
gian
(P
WRT)
và
bộ
tạo
dao
động
(OST)
+
Bộ
đếm
xung
thời
gian
(W
DT)
với
nguồn
dao
động
trên
chíp
(nguồn
dao
động
RC
)
hoạt
động
đáng
tin
cậy.
+
Có
m
ch
ơng
trình
bảo
vệ.
+
Ph
ơng
thức
cất
giữ
SLEEP
+
Có
bảng
lựa
chọn
dao
động.
+
Công
nghệ
CMOS
FLASH
/EEPRO
M
nguồn
mức
thấp
,tốc
độ
cao.
+
Thiết
kế
hoàn
toàn
tĩnh
.
+
M
ạ
ch
ch
ơng
trình
nối
tiếp
có
2
chân.
+
Xử
lý
đọc
/ghi
tới
bộ
nhớ
ch
ơng
trình
.
+
Dải
điện
thế
hoạt
động
rộng
:
2.0V
đến
5.5V
+
Nguồn
sử
dụng
hiện
tại
25
mA
+
Dy
nhiệt
độ
công
nghiệp
và
thuận
lợi
.
+
Công
suất
tiêu
thụ
thấp:
<
0.6mA
với
5V,
4MHz
20
u
A
với
nguồn
3V,
32
kHz
<
1
u
A
nguồn
dự
phòng.
Các
đặc
tí
nh
nổi
bật
của
thiết
b
ị
ngoại
vi
trên
chip
+
Timer0:
8
bít
của
bộ
định
thời,
bộ
đếm
với
hệ
số
tỷ
lệ
tr
ớc
+
Timer1:
16
bít
của
bộ
định
thời,
bộ
đếm
với
hệ
số
tỷ
lệ
tr
ớc,
có
khả
năng
tăng
trong
khi
ở
chế
độ
Sleep
qua
xung
đồng
hồ
đ
ợc
cung
cấp
bên
ngoài.
+
Timer
2:
8
bít
của
bộ
định
thời,
bộ
đếm
với
8
bít
của
hệ
số
tỷ
lệ
tr
ớc,
hệ
số
tỷ
lệ
sau
+
Có
2
chế
độ
bắt
giữ,
so
sánh,
điều
chế
độ
rộng
xung(PWM).
+
Chế
độ
bắt
giữ
với
16
bít,
với
tốc
độ
12.5
ns,
chế
độ
so
sánh
với
16
bít
,
tốc
độ
giải
quyết
cực
đại
là
200
ns,
chế
độ
điều
chế
độ
rộng
xung
với
10
bí
t.
+
Bộ
chuyển
đổi
tín
hiệu
số
sang
t
ơng
tự
với
10
bí
t
.
+
Cổng
truyền
thông
nối
tiếp
SSP
với
SPI
ph
ơng
thức
chủ
và
I
2
C(chủ/phụ)
+
Bộ
truyền
nhận
t
hông
tin
đồng
bộ,
dị
bộ(USAR
T/SCL)
có
khả
năng
phát
hiện
9
bít
địa
chỉ.
+
Cổng
phụ
song
song
(PSP)
với
8
bít
mở
rộng,
với
RD,
WR
và
CS
điều
khiển.
S¬
®å
c¸c
ch©n
PIC16F87X.
Sơ
đồ
khối
bộ
vi
điều
khiển
PIC16F87X
So
sánh
với
bộ
vi
điều
khiển
8051
* Bộ
vi
điề
u
khiển
8051
là
bộ
VĐK
đầu
tiên
thuộc
họ
VĐK
x51
đ
ợc
sản
xuất
bởi
công
ty
Intel,
Siemens,
Advanced
Micro
Devices,
Fujitsu,
Philips.
Các
đặc
điểm
chung
của
bộ
VĐK
này:
+
4KB
ROM
+
128
B
RAM
+
4
cổng
I/O
8
bit
+
2
Timer
16
bit
+
Có
khả
năng
quản
lý
đ
ợc
64
KB
bộ
nhớ
m
ch
ơng
trì
nh
ngoài
(ROM
ngoài).
+
Có
khả
năng
quản
lý
đ
ợc
64
KB
bộ
nhớ
dữ
liệu
ngoài
(RAM
ngoài)
+
Có
bộ
xử
lý
logic
riêng
(thao
tác
trên
các
bit)
+
Có
thể
thao
tác
trực
tiếp
đ
ợc
210
bit
(các
bit
này
đ
đ
ợc
địa
chỉ
hoá)
+
Có
5
ngắt
+
Dùng
nguồn
dao
động
ngoài
+
Dùng
điện
áp
5V
để
cho
chip
hoạt
động
*Cổng
P0:
Có
dạng
cực
máng
hở
và
có
8
chân
(8
bit)
là
cổng
vào/ra
hoặc
là
cổng
chuyển
dữ
li
ệu
và
địa
chỉ.
*Cổng
P1:
Là
cổng
vào/ra
có
8
chân
(8
bit).
*Cổng
P2:
Có
8
chân
(8
bit)
là
c
ổng
vào/ra
hoặc
là
cổng
chuyển
dữ
liệu
và
địa
chỉ.
*Cổng
P3:
Có
8
chân,
cổng
này
có
thể
là
cổng
vào/ra
8
bit
hay
còn
có
các
chức
năng
quan
trọng
khác
nh
phục
vụ
cho
ngắt,
các
bộ
định
thời,
việ
c
truyền
nhận
dữ
li
ệu
truyền
thông
nối
ti
ếp
,
đọc
và
ghi
các
bộ
nhớ
ngoài
Sơ
đồ
khối
của
VĐK
8051
Nh
vậy
có
thể
thấy
đặc
điểm
đầu
tiê
n
mà
PIC16F877
đem
lại
và
nổi
bật
so
với
VĐK
8051
là
dòng
PIC16F877
những
đ
ặc
tính
kĩ
thuậ
t
hơn
hẳn
so
với
bộ
VĐK
8051
thể
hiện
ở
những
đi
ểm
sau:
VĐK8051
VĐK
PIC16F877
Đặc
tí
nh
Số
l
ợng
Đặc
tính
Số
l
ợng
ROM
tr
ên
chíp
RAM
Bộ
định
thời
Các
chân
v
à
o
ra
Cổng
nối
ti
ếp
Nguồn
ngắt
4K
byte
128
byte
2
32
1
6
ROM
tr
ên
chíp
RAM
Bộ
định
thời
Các
chân
v
à
o
ra
Cổng
nối
ti
ếp
Nguồn
ngắt
8K
368
byte
3
40
2
14
Ngoài
những
đặc
tính
trên
thì
bộ
vi
đi
ều
khiển
PIC
16F877
còn
có
một
đặc
điểm
hơn
hẳn
so
với
8051
là
có
10
bít
chuyển
đổi
A/
D
trên
chíp
điều
này
sẽ
giúp
chúng
ta
không
phải
mất
một
bộ
chuyển
đổi
(s
ẽ
dẫn
đến
kết
nối
dây
trở
nên
phức
tạp).
Một
đặc
điểm
nữa
là
bộ
vi
điều
khiển
PIC16F877
có
bộ
tạo
dao
động
chủ
trên
chíp
điều
này
sẽ
tránh
đ
ợc
những
sai
số
không
cần
thi
ế
t
trong
việc
tạo xung
ng, VK
PIC16F877 cú kh nng t RESET bng b WT, v cú thờm 256 byte EEPROM
PHẦN I
THIẾT KẾ PHẦN CỨNG
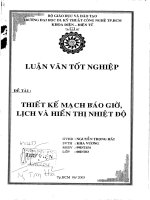
Sơ đồ khối của mạch
♣ Khối xử lý nhiệt độ và khối ADC : Là một sensor nhiệt LM335 và một bộ
ADC 10 bit
Sơ đồ của sensor nhiệt LM335
LM335 cố đầu vào là nhiệt độ môi trường và đầu ra là diện áp
Chân 1 là chân mang dấu “-”, thường được nối đất khi phân
cực
Chân 2 là chân mang dấu “+”, được nối với V+ thông qua một
điện trở và chân 2 cũng là đầu ra của LM335
Chân 3 là chân mang chữ “ADJ”, thường được nối với một
biến trở để điều chỉnh nhiệt độ ban đầu cho phù hợp
Người ta thường phân cực cho nó như sau:
Nhiệt độ
môi trường
Khối xử lý
nhiệt độ
Khối hiển
thị và cảnh
báo
Khối
ADC
Khối xử lý
vào ra
Khối xử lý chung