Thiết kế động học toàn máy
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (245.42 KB, 21 trang )
CHƯƠNG II
THIẾT KẾ ĐỘNG HỌC TOÀN MÁY
2.1. Thiết kế hợp tốc độ (HTĐ) và hợp trục chính(HTC):
- Theo yêu cầu máy cần thiết kế là 12 cấp tốc độ. Đây là số cấp tốc
độ trung bình, công suất vừa phải. Để đảm bảo độ cứng vững thì
kết cấu của nó phải đủ lớn. Ta bố trí HTĐ và HTC tách rời
nhau( giống như máy chuẩn).
- Bố trí như vậy có những ưu điểm sau:
+ Khả năng chế tạo dễ.
+ Truyền động êm, HTC không bò ảnh hưởng rung động do HTĐ
truyền đến.
+ Dễ bố trí truyền động trong hộp
- Nhưng có những nhược điểm sau:
+ Giá thành chế tạo cao.
+ Máy cồng kềnh.
2.1.1 Thiết kế động học HTĐ
Công bội ϕ:
Ta có: (II-16-[1])
Trong đó: R
n
– Phạm vi điều chỉnh tốc độ.
Z – Số cấp tốc độ Z=12
Vậy: . Chọn theo tiêu chuẩn chọn ϕ=1,41
Chọn phương án không gian: (PAKG)
- Hộp tốc độ dùng bánh răng di trượt để thay đổi số vòng quay nên
có những ưu điểm sau:
+ Điều chỉnh vận tốc dễ dàng.
+ Có thể truyền được mô men xoắn và công suất lớn mà kích
thước tương đối nhỏ.
+ Hạn chế tiềng ồn, ít mòn, đỡ tốn năng lượng, nâng cao được
hiệu suất truyền động.
- Nhưng có những nhược điểm sau:
+ Chỉ dùng được bánh răng thẳng, rất khó dùng bánh răng
nghiêng và không dùng bánh răng chữ V.
+ Kích thước theo chiều trục tương đối lớn.
!"# $
1
−
=
Z
n
R
ϕ
427,150
112
==
−
ϕ
50
20
1000
min
max
===
n
n
R
n
a. Tính số nhơm truyền tối thiểu:
Ta có: (6-22, [ 1 ])
Do đó, lấy số nhóm truyền tối thiểu = 3
b. Chọn phương án không gian:
- Ta có thể phân bố phương án không gian trên cơ sở các nhóm
truyền bánh răng di trượt 2, 3 bậc.
Ta xét các phương án sau:
Z = 12 =3x2x2 = 2x3x2 = 2x2x3
- Để lựa chọn phương án tối ưu ta phân tích tính toán như sau:
+ Tổng số răng của hộïp: S
r
= 2(P
1
+P
2
+P
3
+...+P
n
)
PAKG: 3x2x2 có S
r
= 2(3+2+2)= 14 (Bánh răng)
PAKG: 2x3x2 có S
r
= 2(2+3+2)= 14 (Bánh răng)
PAKG: 2x2x3 có S
r
= 2(2+2+3)= 14 (Bánh răng)
+ Tổng số trục của phương án không gian S
tr
= x+1
PAKG: 3x2x2 có S
tr
= 3+1= 4 (Trục)
PAKG: 2x3x2 có S
tr
= 3+1= 4 (Trục)
PAKG: 2x2x3 có S
tr
= 3+1= 4 (Trục)
+ Chọn chiều dài sơ bộ của hộp tốc độ theo công thức: L
min
= Σb
+Σf
Trong đó: b - chiều rộng bánh răng. Chọn b = 15(mm)
f - Khoảng hở để lắp miếng gạt, rãnh để thoát dao
xọc răng của khối bánh răng di trượt nhiều bật hay để bảo vệ khi
gạt vào khớp và ra khớp(yêu cầu khối bánh răng di trượt phải ra
khớp hoàn toàn khối bánh răngn khớp với nó một khoảng bằng
khe hở f rồi mới được ghép gạt vào khớp sang cặp bánh răng
khác). f = 10 [mm].
Bảng 2.1: Lập bảng so sánh phương án không gian:
!"# %
&'''&'''&()*+,$$$()+-.$$$/
0
1
*234*234*2345*+,6+-.+&
7
8))
min
log6,1
n
n
x
dc
=
97,2
20
1440
log6,1
==
x
- Từ những điều kiện phân tích trên ta có sơ đồ động HTĐ như sau:
c. Chọn phương án thứ tự(PATT) và đồ thò vòng quay:
- Từ phương án không gian ta đã chọn, ta có số phương án thứ tự
là:
n! = 3! = 6
I-II-III; I-III-II; II-III-I; II-I-III; III-I-II; III-II-I
Bảng 2.2: Lập bảng so sánh PATT của PAKG đã chọn như sau:
PAKG 3x2x2 3x2x2 3x2x2 3x2x2 3x2x2 3x2x2
PATT I-II-III I-III-II II-III-I II-I-III III-II-I III-I-II
x
i
[1] [3]
[6]
[1] [6]
[3]
[2] [6]
[1]
[2] [1]
[6]
[4] [2]
[1]
[4] [2]
[1]
Lưới kết
cấu
nhóm 1 1 3
6
1 1 6
3
2 2 6
1
2 2 1
6
4 4 2
1
4 4 2
1
x
i
max 6 6 6 6 4 4
ϕ
(pi-1)xi
≤8 Thỏa
mãn
Thỏa
mãn
Thỏa
mãn
Thỏa
mãn
Không
thỏa
Không
thỏa
!"# 3
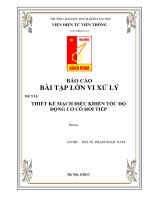
Hình 2.1 Sơ đồ động của hộp tốc độ tổng thể
0
' '
'
'
'''
- Từ bảng (2-2) ta thấy có 4 phương án phù hợp. Vậy ta chọn ra 1
phương án phù hợp nhất bằng cách vẽ lưới cấu:
- Dựa vào lưới kết cấu ta chọn PATT: I-II-III, có kết cấu dạng hình
rễ quạt. Vì lưới kết cấu có dạng này cho ta kết cấu hộp hỏ gọn, bố
trí các cơ cấu truyền động của hộp là chặc chẽ nhất. Ngoài ra
lượng mỡ tỷ số truyền bé trong miền tốc độ cao, đảm bảo điều
kiện làm việc tốt nhất của bánh răng.
- Để nối liền truyền động từ HTĐ đến HTC, dùng bộ truyền đai. Do
đó phương án bố trí không gian bò biến hình lần thứ nhất với
công thức kết cấu:
!"#
9
99
999
9"
&
$
%
3
:
;
9
99
999
9"
&<=9
<=9
<3=9
&
$
%
3
:
;
&<=
<&=
<3=
&
$
%
3
:
;
&<=
<3=
<&=
9
99
999
9"
&
$
%
3
:
;
9
99
999
9"
&<=
9
<=
9
<3=
9
Hình 2.2 Lưới kết cấu của các phương án thứ tự
&$%3:;
Hình 2.3 Kết cấu biến hình lần thứ nhất.
<;=
&<=
<&=
<;=
"9
"
9"
9
999
99
9
<3=
%
;
$
3
i
â
&
Z = 1[0] 3[1] 2[3] 1[0] 2[6]
- Vì HĐT có hệ số công bội ϕ = 1,41 nên phạm vi điều chỉnh tỷ số
truyền trong nhóm truyền động cuối cùng.
+ Trong trường hợp này cả hai tỷ số truyền: i
max
=i
7
, i
min
= i
6
đều
có giá trò giới hạn, tức là i
7
= 2; i
6
= ¼.
+ Để giới hạn kích thước bộ truyền đai ta lấy i
7
= 1, đồng thời
để đảm bảo phạm vi điều chỉnh số vòng quay yêu cầu, cần phải có
i6= 1/8. Vậy để đảm bảo điều kiện truyền động i ≥ ¼, ta dùng
thêm 1 trục trung gian để tách i6 thành 2 tỷ số truyền i
6
= i
6a
.i
6b
.
Do đó phương án bố trí không gian biến hình lần thứ 2 với công
thức kết cấu như sau: Z = 1 x 3 x 2 x (1+1 x 1).
Lưới kết cấu
trên ta thấy 12
cấp tốc độ của
hộp tốc độ truyền
đến trục chính
theo 2 đường
truyền trực tiếp
cho 6 cấp số vòng
quay cao. Đường
truyền gián tiếp
cho 6 cấp số vòng
quay thấp.
Đồ thò vòng quay :
- Chọn tỷ số truyền:
+ Nhóm I: Có 3 tỷ số truyền i
1
: i
2
: i
3
: = 1 : ϕ : ϕ
2
Ta chọn:
!"# :
841,1
66
6
7
====
ϕ
i
i
R
i
==
===
===
41,1
11
99,1
1
41,1
11
8,2
1
41,1
11
3
22
2
33
1
ϕ
ϕ
ϕ
i
i
i
&$%3:;
Hình 2.4 Đồ thò vòng quay
3*
3
>
$
;
&
"9
"99
"
9"
999
99
<;=
&<=
<&=
<;=
<&=
<&=
9
===
===
===
41,1
1
41,1
11
99,1
1
41,1
11
8,2
1
41,1
11
3
22
2
33
1
ϕ
ϕ
ϕ
i
i
i
Vậy , được thỏa mãn.
+ Nhóm II: Có23 tỷ số truyền i
4
: i
5
= 1 : ϕ
3
Ta chọn:
Vậy , được thỏa mãn.
+ Nhóm III: Có 2 tỷ số truyền i
6
: i
7
= 1 : ϕ
6
Ta chọn:
Vậy , được thỏa mãn.
• Vẽ đồ thò vòng quay với công bội ϕ=1,41 và số vòng quay
n
tc
=n
1
÷n
12
.
d. Tính số răng của các bánh răng:
- Trục động cơ đến trục II với tỷ số truyền i
o
:
- Số răng của các cặp bánh răng :
!"#
'
0
36
25
1440
1000
o
o
Z
Z
i
===
+
=
+
=
jj
j
j
jj
j
j
gf
g
kEZ
gf
f
kEZ
.
.
'
2
4
1
≤≤
i
==⇒===
=
79,2
1
41,1
11
.
1
66
66
666
7
baba
iiiii
i
ϕ
2
4
1
≤≤
i
==
==
41,1
99,1
11
5
2
4
ϕ
ϕ
i
i
2
4
1
≤≤
i
>.
&$%3:;
Hình 2.4 Đồ thò vòng quay
3*
3
>
$
;
&
Với f
j
, g
j
– là 2 thừa số nguyên, không có thừa số chung
k – Bội số chung nhỏ nhất của mọi tổng (f
j
+g
j
).
E – Số nguyên.
- Ta lần lượt tính số răng của các bánh răng.
+ Nhóm I: , cho nên f
1
+g
1
= 27 = 3
3
, cho nên f
2
+g
2
= 3 =3
, cho nên f
3
+g
3
= 12 = 3x2
2
Từ các thừa số trên ta có bội số chung nhỏ nhất (BSCNN)
K=3.4.9 =108
Trong nhóm truyền động này có i
min
=i
1
, i
max
=i
3
, tỷ số truyền i
1
có độ nghiên lớn hơn i
3
nên bánh răng nhỏ nhất nằm ở i
1
và
nghiêng sang trái, ta dùng công thức E
minc
để tính E
min
:
Ta chọn: E =1, do đó:ΣZ = E.k=108.1= 108
Vậy số răng trong nhóm I là:
+ Nhóm II: , cho nên f
4
+ g
4
= 3
, cho nên f
5
+ g
5
= 12 = 3.4
!"# ;
j
j
j
g
f
i
=
1
1
1
20
7
8,2
1
g
f
i =≈=
2
2
2
2
1
99,1
1
g
f
i =≈=
7
5
41,1
1
3
≈=
i
( )
x
xx
C
fk
gfZ
E
.
min
min
+
=
( )
( )
1
28
17
7.12
20717
.
1
11min
min
<=
+
=
+
=
fk
gfZ
E
C
28
207
7
108
11
1
1
=
+
=
+
Σ=
gf
f
ZZ
80
207
20
108
11
1
'
1
=
+
=
+
Σ=
gf
g
ZZ
72
21
2
108;36
21
1
108
'
22
=
+
==
+
=
ZZ
63
75
7
108;45
75
5
108
'
33
=
+
==
+
=
ZZ
4
4
4
2
1
99,1
1
g
f
i
=≈=
5
5
5
5
7
41,1
g
f
i
=≈=
Từ các thừa số trên ta có BSCNN: k= 3. 4 = 12
Trong nhóm truyền động này có i
min
= i
4
và i
max
= i
5
, tỷ số truyền i
4
có độ nghiêng lớn hơn i
5
nên bánh răng nhỏ nhất nằm ở i
4
nghiêng sang trái, ta dùng công thứcE
minc
để tính E
minc
:
Chọn E = 8, do đó: ΣZ = E.k = 8.12= 96
Ta có:
+ Nhóm III:
, cho nên f
6a
+g
6a
= f
6b
+g
6b
=
34.
Vậy BSCNN: k = 34.
Trong nhóm truyền động này có i6a và i6b nghiêng sang trái nên
ta dùng công thức E
minC
để tính E
min
:
Chọn E = 3, do đó: ΣZ = E.k = 34.3=102
Ta có:
i
7
= 1, cho nên ta chọn Z
7
= Z’
7
= 27.
Lập bảng 2.3:
e. Kiểm tra số vòng quay:
Ta tính số vòng quay thực tế n
tt
từ n
1
÷n
12
:
!"#
64
21
2
96;32
21
1
96
'
44
=
+
==
+
=
ZZ
( )
( )
9,1
9.34
25917
.
6
66min
min
=
+
=
+
=
a
aa
fk
gfZ
E
40
75
5
96;56
75
7
96
'
55
=
+
==
+
=
ZZ
b
b
a
a
ba
g
f
g
f
ii
6
6
6
6
25
9
79,2
1
==≈==
75
259
25
102;27
259
9
102
'
6
'
666
=
+
===
+
==
baaa
ZZZZ
( )
( )
25,4
1.12
2117
.
4
44min
min
=
+
=
+
=
fk
gfZ
E
c
'
6
6
'
6
6
'
4
4
'
1
1
'
66411
...........
b
b
a
a
d
o
o
obadoo
Z
Z
Z
Z
i
Z
Z
Z
Z
Z
Z
niiiiiinn
==
==
ph
vg
6,22
75
27
.
75
27
.1.
64
32
.
80
28
.
36
25
1140
===
ph
vg
Z
Z
Z
Z
i
Z
Z
Z
Z
Z
Z
nn
b
b
a
a
d
o
o
o
4,32
75
27
.
75
27
.1.
64
32
.
72
36
.
36
25
1440.....
'
6
6
'
6
6
'
4
4
'
2
2
'
2
?:
?
?$
?
%
@?$
?
?
@ABAC:B:;&3B$%B3&&B3$%3B$;B%B%BΣA;:3;%$
@
@
$
@
3
@
3*
@
&
@