MÔ HÌNH ĐỘNG học lái và PHƯƠNG PHÁP điều KHIỂN kết hợp TRÊN XE tự HÀNH
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (5.15 MB, 9 trang )
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
MÔ HÌNH ĐỘNG HỌC LÁI VÀ PHƯƠNG PHÁP ĐIỀU KHIỂN KẾT HỢP
TRÊN XE TỰ HÀNH
DRIVING KINETIC MODEL AND COMBINING CONTROL METHOD ON
AUTONOMOUS CAR
Lê Phan Hưng1a, Nguyễn Trường Thịnh2b
1
Trường ĐH Cần Thơ
2
Trường ĐH Sư phạm Kỹ thuật TPHCM
a
;
TÓM TẮT
Trong bài báo này, chúng tôi đề cập đến việc thiết kế, mô hình hóa và phát triển một xe
tự hành (XTH) dựa trên cấu trúc của robot di động nhằm mục đích chuyên chở hành khách.
XTH này được thiết kế với khả năng lái tự động bằng động cơ điện và được mô hình hóa là hệ
thống động học non-holonomic với di chuyển là lăn và không trượt. Phương pháp điều khiển
bám theo quỹ đạo cho trước dựa trên mô hình hóa, động học, động lực học và phần điều khiển
bám theo quỹ đạo cho trước của xe cũng sẽ được đề cập trong bài báo này. Thực nghiệm để
đánh giá đáp ứng của xe dựa trên phương pháp điều khiển theo bài toán động học và động lực
học bám theo quỹ đạo cho trước.
Từ khóa: xe tự hành, robot di động, động học, động lực học, xe tự dẫn hướng.
ABSTRACT
In this paper, we mention about modelling and development of an autonomous car
based on the structure of mobile robot carrying passengers. This autonomous car is designed
to drive by electric motors automatically, and it is modeled as dynamical system of nonholonomic movement with rolling and non-sliding. Tracking method based on kinematics,
dynamics and controlling for tracking desired trajectories is also mention in this paper.
Experiments were implemented to evaluate the responding of controlling system based on
dynamics and kinematics controlling method for tracking desired trajectories.
Keywords: Autonomous xar, mobile robot, kinematics, dynamics, automatic guided vehicle.
Ký hiệu
Ký hiệu
Đơn vị
Ý nghĩa
Toạ độ trọng tâm của xe tự hành
G
L
mm
Khoảng cách của bánh trước và bánh sau
a, b
mm
Khoảng cách từ trọng tâm xe đến bánh trước và bánh sau
t
mm
Khoảng cách 2 bánh sau
φ
radian
Góc lái giữa bánh trước và trục của thân xe
θ
radian
Góc tạo bởi trục thân xe và trục x
β
radian
Góc giữa trục thân xe và vectơ vận tốc
Fu, Fw, Fd
N
Lực ma sát, lực tác động vuông góc lên mỗi bánh xe, lực
truyền động
m
kg
Khối lượng xe
τs, u
hằng số thời gian, biến điều khiển lái
30
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
Chữ viết tắt
PID
Proportional Integral Derivative
AC Alternating current
PWM
Pulse-width modulation
DC Direct current
1. GIỚI THIỆU
Ngày nay, với nhu cầu phát triển ngày càng mạnh mẽ của các phương tiện di chuyển
công cộng, đặc biệt là những phương tiện di chuyển thông minh không người lái chuyên chở
hành khách trong môi trường công cộng như công viên, khu vui chơi giải trí... Từ những nhu
cầu này, một robot dạng xe có thể di chuyển không người lái từ trạm này đến trạm khác đã
được thiết kế và phát triển. Các ứng dụng của robot di động cũng có thể được tìm thấy trong
nhiều lĩnh vực như công nghiệp, y tế, môi trường và thậm chí trong cả hộ gia đình. Các nghiên
cứu về robot di động đã gắn kết và thu hút rất nhiều sự chú ý trong những năm gần đây bởi
những ứng dụng rộng rãi. Bên cạnh đó, với sự phát triển ngày càng mạnh mẽ của việc nghiên
cứu robot di động thì một thành phần quan trọng trong việc nghiên cứu đó là nghiên cứu về
robot dưới dạng XTH [1]. XTH, còn được gọi là robot di động hay xe tự lái có khả năng thực
hiện việc chuyên chở và vận chuyển con người như một chiếc xe truyền thống. Là một robot di
động nên xe có khả năng cảm nhận môi trường xung quanh và điều hướng riêng của xe. Tuy
nhiên, một số nghiên cứu cũng đã chỉ ra các chủ đề liên quan đến đặc tính động lực học của
XTH là rất cần thiết để di chuyển bám theo quỹ đạo. Nó đã chỉ ra vấn đề của việc tính toán phù
hợp quỹ đạo trên các địa hình khác nhau và những hạn chế của việc bám theo quỹ đạo. Điều
này đòi hỏi tìm hiểu một số cơ chế để thích ứng với các kế hoạch lập quỹ đạo dưới bất kì điều
kiện nào. Bài viết cũng trình bày các công việc đã được thực hiện để khám phá những vấn đề
của mô hình động học và động lực học cũng như điều khiển chuyển động theo các điều kiện tải
khác nhau. Điều này dẫn đến sự phát triển của một mô hình động lực học cho XTH.
Động lực di chuyển của XTH có thể đạt được bằng cách áp dụng một số lực tác động tại
bất kỳ điểm nào và bất kỳ hướng nào. Nó có thể được sử dụng để có được động lực chung cho
xe chuyển động tự do. Điều này có thể được chia thành chuyển động lập quỹ đạo và chuyển
động học xoay motor theo quỹ đạo. Để thực hiện các đường đi chính xác, thì động cơ điều
hướng quỹ đạo phải xem xét cả hai hạn chế làm cho động cơ và động lực tải với những đặc
tính riêng [2]. Bài báo này bao gồm 5 phần, mô hình hóa XTH sẽ được trình bày ở phần 2.
Phần 3 bài báo tập trung vào phương pháp lập quỹ đạo và điều khiển chuyển động của xe.
Thực nghiệm cùng kết quả đạt được sẽ được nêu trong phần 4. Cuối cùng là kết luận về XTH.
2. MÔ HÌNH HÓA XE TỰ HÀNH
2.1. Mô hình động học lái
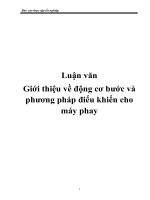
Hình 1. Động học lái của robot 4 bánh và mô hình hóa với xe 2 bánh
31
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
Mô hình của XTH được bắt nguồn từ những khống chế quan trọng trong hệ thống động
học non-holonomic. Khống chế về hệ thống động học non-holonomic của XTH thì không khả
tích và liên quan đến vận tốc của nó. Mô hình động học của hệ thống XTH gồm 4 bánh: 2
bánh lái trước và 2 bánh truyền động sau có thể mô hình như một chiếc xe đạp với góc lái
nhỏ. Mô hình xe đạp động học được biểu thị bằng cách lắp bánh xe bên trái và bên phải thành
một cặp bánh xe duy nhất tại trung tâm của trục trước và phía sau như thể hiện trong Hình 1.
Giả thuyết là các bánh xe không trượt và bánh trước là bánh lái của xe. G là trọng tâm của
XTH. Khoảng cách từ G đến bánh trước và bánh sau là a và b.
Với tốc độ thấp, động học của hệ thống lái được xác định là di chuyển với chuyển động
thuần túy của bánh xe. Vận tốc của tâm các bánh xe nằm trên mặt phẳng giữa. Với XTH
chúng ta có 4 bánh, 2 bánh lái. Mối liên hệ của động học lái với điều kiện vuông góc với các
mặt phẳng giữa của bánh trước phải giao với đường nối tâm của 2 bánh sau:
l
tan (φ1 ) =
R1 −
tan (φ2 ) =
t
2
(1)
t
2
(2)
l
R1 +
Với t là khoảng cách giữa 2 bánh sau, dựa vào Hình.1 chúng ta có mối quan hệ giữa φ1
và φ2 như sau:
t
cot (φ1 ) − cot (φ2 ) =
l
(3)
2.2. Mô hình động lực học
Mô hình động lực học của XTH được xác định với các giả thiết là: các bánh xe không
trượt, bánh xe sau không có thể lái và luôn cùng hướng với hướng của xe, lực và moment
truyền động được giả sử là tác động lên tâm của bánh sau. Lực tác động lên XTH được biểu
diễn như trên Hình 2.
Hướng U
v
Fuof
Fwof
θ
Fuif
Fwif
a
G
b
Hình 2. Mô hình bài toán động lực học của xe tự hành
32
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
Fu, Fw, Fd là lực ma sát, lực tác động vuông góc lên mỗi bánh xe, lực truyền động. Ký
hiệu m là khối lượng của xe [3]. Ký hiệu góc lệch θ là góc tạo bởi hướng của xe và trục
ngang. φ là góc lái giữa bánh trước và trục của thân xe. Cân bằng các lực dọc theo hướng u và
w chúng ta có:
(
)
m vu − vwθ =
− Fur + Fdr − Fuf cos φ − Fwf sin φ
(
)
m vw + vuθ =Fwr − Fuf sin φ + Fwf cos φ
(4)
(5)
Với
Fwir + Fwor =
Fwr
(6)
Fuir + Fuor =
Fur
(7)
Fwif + Fwof =
Fwf
(8)
Fuif + Fuof =
Fuf
(9)
Fdir + Fdor =
Fdr
(10)
Động lực học hệ thống lái XTH có thể mô hình biểu diễn bởi phương trình vi phân sau:
1
=
φ
(u − φ )
τs
(11)
Với τs, u là hằng số thời gian và biến điều khiển lái.
3. LẬP QUỸ ĐẠO DI CHUYỂN VÀ GIẢI THUẬT ĐIỀU KHIỂN XE TỰ HÀNH
Bài toán lập đường đi được đặt ra cho XTH là di chuyển trong điều kiện biết trước, việc
xác định trước môi trường hoạt động đóng vai trò rất lớn đến sự di chuyển của xe. Trong bài
báo này, phương pháp điều khiển đầu tiên dược xem xét là sử dụng bộ điều khiển vòng hở.
Tuy nhiên, điều khiển theo phương pháp vòng hở không có sử dụng hồi tiếp nên không thể
đảm bảo rằng XTH sẽ di chuyển dọc theo quỹ đạo mong muốn theo kế hoạch. Vì vậy xe sử
dụng bộ điều khiển vòng kín, nhánh phản hồi của vòng kín sẽ cải thiện tín hiệu đáp ứng của
hệ thống cho dù có những tín hiệu tác động bên ngoài như nhiễu hoặc sai số ban đầu. Trong
quá trình điều khiển này, hệ thống đo theo thời gian thực được sử dụng để xây dựng trạng thái
tức thời của xe. Khi xe di chuyển trong môi trường có cấu trúc như công viên hoặc khu giải trí
thì điều quan trọng là an toàn, vì vậy xe đi trong làn đường của riêng xe. XTH cấu trúc như
vậy rất hữu ích bởi vì nó hạn chế các hành động có sẵn của xe và làm giảm sự phức tạp của
nhiệm vụ điều hướng [4]. Nhiệm vụ của bộ điều khiển là đạt được các mục tiêu khác nhau và
các tính năng mong muốn cho việc di chuyển. Bộ điều khiển cũng được thiết kế để thực hiện
các trình tự di chuyển một cách chính xác khi xảy ra các sai số khác nhau.
XTH được thiết kế với cấu hình giống xe ô tô với 2 bậc tự do. Nguồn động lực chính
cho xe di chuyển là động cơ Servo AC truyền động cho 2 bánh chủ động thông qua cầu sau.
Bộ điều khiển sẽ nhận lệnh điều khiển, vị trí tương đối xe so với quỹ đạo và xuất tín hiệu điều
khiển động cơ servo DC kéo hệ thống lái cho xe đi đúng quỹ đạo như Hình 3a.
Trong quá trình điều khiển, XTH sử dụng cấu trúc của hệ thống điều khiển 2 tầng được
thiết kế để điều khiển bánh lái. Lớp điều khiển mức cao dựa vào bộ điều khiển logic mờ dựa
trên việc thu thập dữ liệu của cảm biến và so sánh nó với quỹ đạo tham chiếu để tạo ra lệnh
xoay bánh lái theo yêu cầu. Lớp cấp độ thấp hơn sử dụng một bộ điều khiển động cơ PID cổ
điển nhận lệnh xoay bánh lái từ tín hiệu ra của lớp cao và điều khiển động cơ lái đạt đến vị trí
yêu cầu. Cấu trúc 2 tầng (lớp) này còn gọi là cấu trúc điều khiển theo tầng (cascade control). Sơ
33
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
đồ điều khiển theo tầng đặc biệt thích hợp cho việc điều khiển bánh lái, có một khoảng thời gian
trễ đáng kể giữa biến tác động và biến điều khiển. Trong trường hợp này, sử dụng tín hiệu đo
tức có thể đáp ứng nhanh hơn so với tín hiệu điều khiển. 2 vòng điều khiển được ứng dụng
trong sơ đồ này như Hình 3b. Một vòng trong được biết như vòng thứ cấp và vòng ngoài là
vòng sơ cấp. Với vòng điều khiển sơ cấp sẽ xác định vị trí bánh lái cần đạt và vòng điều khiển
thứ cấp sẽ bám theo chuyển động xoay của động cơ để hướng tới vị trí mong muốn.
Quỹ đạo
yêu cầu
Bộ điều
khiển lái
Vị trí lái
yêu cầu
Góc
xoay
Bộ điều
PWM Động cơ Moment Bánh
khiển
DC
lái
PID
Vị trí lái
Vòng điều khiển trong
Vòng điều khiển ngoài
Hướng di
chuyển của xe
Xe tự
hành
a)
Vị trí đặt
Bộ điều
khiển
Hành khách
Vị trí và hướng mong muốn
Bộ điều
khiển
xd
Động cơ
DC
Động cơ
AC
Bánh lái
Bánh truyền
động
θd
yd
Quỹ đạo được tạo ra
Bộ điều khiển
xe tự hành
Bộ điều
khiển bánh
lái
Xe tự hành
b)
Bộ điều
khiển bánh
truyền động
c)
Hình 3. Sơ đồ khối bộ điều khiển của xe tự hành: a) Hệ thống điều khiển bánh lái và
bánh truyền động. b) Bộ điều khiển theo tầng. c) Bộ điều khiển chuyển động
Trong quá trình này, một thuật toán điều khiển thích ứng chuyển động dựa trên bộ điều
khiển lái của XTH được xem xét. Bộ điều khiển này đã được thiết kế với cấu trúc PID để ước
tính sự thay đổi của các tham số hệ thống động lực học. Cấu trúc điều khiển lái và truyền
động cung cấp một khuôn khổ tốt để ước tính các thông số mô hình. Điều này có thể đạt được
thông qua cơ chế dự toán. Sau đó, bộ điều khiển sẽ thực thi chống lại những thay đổi động lực
và có những điều khiển thích hợp kiểm soát các chuyển động. Tuy nhiên, bộ điều khiển này
không có khả năng kiểm soát khi có những thay đổi về địa hình di chuyển. Sơ đồ khối cơ bản
cho bộ điều khiển lái và truyền động thích ứng được chỉ ra trong Hình 3c.
4. THỰC NGHIỆM VÀ KẾT QUẢ
XTH được mô phỏng và tiến hành thực nghiệm như Hình 4. Để tiến hành thực nghiệm,
các thông số của XTH như kích thước cơ sở, tải trọng cho phép, hệ thống năng lượng… được
thể hiện tại Bảng 1. Đối với robot di động cũng như XTH, ngoài bộ điều khiển đóng vai trò khá
quan trọng thì hệ thống cảm biến cũng đóng vai trò quan trọng không kém. Máy tính gắn trên
xe được xem như là bộ điều khiển trung tâm của xe, nó có chức năng tính toán, phân tích các
thông số của xe hiện thời và xuất ra tín hiệu điều khiển cho xe. Máy tính chạy trên hệ điều hành
Windown XP và được cài đặt Visual studio C++.net. XTH tương tác với máy tính giám sát
thông qua máy tính gắn trên xe qua giao tiếp RS-232 không dây. Máy tính gắn trên xe giao tiếp
với các MCU qua giao tiếp RS-232. Hệ thống ra quyết định chính xuất phát từ máy tính từ trung
34
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
tâm điều khiển, nó sẽ điều khiển các phần cứng trên xe thông qua mạng truyền thông không
dây. Các tín hiệu điều khiển được phân tích, xử lý và truyền về máy tính trung tâm mỗi 100ms.
Ngoài ra máy tính còn làm nhiệm vụ thu thập dữ liệu từ cảm biến, la bàn số, GPS để định vị trí
của xe đồng thời gửi dữ liệu truyền lệnh cho vi điều khiển thực hiện những lệnh như điều khiển
động cơ trước nhằm bẻ hướng lái, hoặc cho vi điều khiển xuất tín hiệu điều khiển vận tốc động
cơ sau. Trong bài báo này, đối tượng nghiên cứu là XTH được trang bị với một số lượng lớn
cảm biến ở Hình 5 để xác định vị trí, tốc độ, hướng cũng như các cảm biến xác định sự hiện
diện của chướng ngại vật. Phần chuyển động của robot được trang bị 1 động cơ ba phase có sẵn
hộp giảm tốc và được truyền qua bánh sau nhờ cơ cấu vi sai, phần lái được trang bị động cơ
24VDC có qua hộp giảm tốc để điều khiển bánh lái. Đồng thời XTH cũng được trang bị 4 cảm
biến siêu âm SRF05, 1 la bàn số, 1 bộ thu phát GPS, có tất cả là 3MCU trên xe tự hành. Các
chức năng của MCU như sau: MCU 1 nhận tín hiệu từ các cảm biến sau đó xử lý và ra quyết
định, MCU 2 dùng cho quá trình điều khiển bánh sau, MCU 3 điều khiển bánh trước. Các MCU
trên xe tự hành dùng PIC16F887. Tất cả các cảm biến này đều được sử dụng để nhận diện môi
trường xung quanh cũng như điều khiển hệ thống các động cơ chấp hành.
Bảng 1. Bảng thông số cơ bản của xe tự hành
STT
Thông số
Giá trị
1
Kích thước (Dài x Rộng x Cao)
2750x1500x1700 (mm)
2
Kích thước cơ sở (Dài x Rộng)
2030x1230 (mm)
3
Khoảng cách gầm
300mm
4
Khối lượng
470kg (kể cả acquy)
5
Khả năng tải
4 người + hành lý (260kg)
6
Nguồn năng lượng
4 bình Acquy Đồng Nai: 2 bình 24V/12(Ah),1 bình
24V/100(Ah), 1 bình 12V/40(Ah)
7
Thời gian hoạt động
1 giờ
8
Số bậc tự do
2
9
Động cơ truyền động
AC servo 750 W
10
Động cơ lái
DC servo 200 W
11
Thắng
Cơ/điện
Hình 4. Mô hình hóa và thực tế xe tự hành
35
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
Truyền không dây
Máy tính điều
khiển mức cao
Hệ thống
camera
Vi điều khiển điều
khiển mức thấp
Hệ thống điều khiển
trung tâm
MCU 1
MCU 2
MCU 3
Các cảm
biến
Động cơ
DC
Động cơ
AC
Hình 5. Hệ thống điều khiển trên xe tự hành
Sử dụng phần mềm Matlab để tính toán và vẽ đồ thị các thông số thu được từ thực
nghiệm. Mô hình sẽ tính toán và chỉ ra các sai số xuất hiện trong quá trình di chuyển của xe,
đồng thời đánh giá việc kiểm soát hoạt động của bộ điều khiển sơ cấp và thứ cấp. Kết quả cho
thấy sự kết hợp giữa bộ điều khiển mức sơ cấp và thứ cấp bù đắp rất tốt những sai số sinh ra
trong quá trình xe di chuyển. Quá trình thực nghiệm đầu tiên được tiến hành là cho xe di
chuyển trên đường thẳng. Trong quá trình di chuyển theo đường thẳng cho trước, chúng tôi
kiểm tra các giải thuật điều khiển bám theo với các thiết bị cảm biến và thu thập dữ liệu như
đã đề cập trên. Đáp ứng của quá trình điều khiển bám theo quỹ đạo đường thẳng cho trước
như Hình 6.
Hình 6. Đáp ứng của xe tự hành khi đi theo đường thẳng
Trên hình chúng ta thấy quá trình bám theo quỹ đạo đường thẳng cho trước tương đối
tốt, tuy nhiên ở đoạn cuối quỹ đạo chuyển động của xe bị lệch ra khỏi quỹ đạo do việc điều
khiển có sai số của góc lái bánh xe. Sai số này do khe hở các bộ truyền ăn khớp như ly hợp,
bộ truyền thanh răng bánh răng của trục bánh lái làm cho việc lái không ổn định và gây ra sai
số cho quá trình bám theo quỹ đạo cho trước.
Sau khi tiến hành chạy thử nghiệm với việc bám theo đường thẳng, chúng tôi tiến hành
thử nghiệm chạy theo quỹ đạo nhiều lần khác nhau như trong Hình 7. Trong hình vẽ, nét liền
là quỹ đạo yêu cầu và cho trước, nét đứt là quỹ đạo đáp ứng. Các quỹ đạo này được chồng lên
36
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
bản đồ di chuyển để xác định vị trí chính xác của XTH trong môi trường tự nhiên. Nhận thấy
trong quá trình chuyển động thẳng ban đầu từ vị trí xuất phát đến điểm bắt đầu bẻ lái 90 độ thì
quá trình bám theo quỹ đạo cho trước khá tốt, sai số lệch không đáng kể so với vectơ chuyển
động. Quá trình xoay 90 độ cũng bám khá tốt như yêu cầu, tuy nhiên sau khi xoay xong xe
tiếp tục di chuyển thẳng, quá trình này bắt đầu xuất hiện sai số có thể nhận thấy. Việc xuất
hiện sai số lớn là do sau khi xoay, sai số các bộ truyền bắt đầu tích lũy làm cho hệ thống lái
tạo ra sai số và dao động xung quanh điểm 0 của vectơ lái. Như vậy, sai số gây ra trong quá
trình điều khiển không phải do giải thuật điều khiển tạo ra mà do sai số trong quá trình truyền
động cơ khí.
Start
Moving direction
End
Start
Moving direction
End
Hình 7. Đáp ứng của xe tự hành khi di chuyển theo quỹ đạo mong muốn lần 1 và 2
KẾT LUẬN
Bài báo đã đưa ra mô hình hóa động lực học và phát triển một robot di động dựa trên
cấu trúc của một chiếc XTH chuyên chở hành khách. Bài báo này cũng đã đánh giá được hệ
thống điều khiển theo tầng, bộ điều khiển kết hợp phát hiện những thay đổi và có những phản
ứng nhằm đáp ứng theo quỹ đạo mong muốn. Tất cả những vấn đề này rất quan trọng cho việc
kiểm soát chuyển động. Hệ thống điều khiển kết hợp đã được nghiên cứu và thử nghiệm trên
XTH để thấy được sự khác biết giữa các bánh lái và bánh truyền động. Kết quả thực nghiệm
cho thấy rằng đáp ứng của XTH theo hệ thống kết hợp đã được cải thiện và tính chính xác khi
đi theo quỹ đạo mong muốn cũng được cải thiện đáng kể, nó có thể được nhìn thấy từ kết quả
thực nghiệm. Bên cạnh đó, những kết quả thực nghiệm chỉ ra hiệu quả của phương pháp điều
khiển dựa trên các bài toán động học và động lực học của XTH trong môi trường thực tế.
37
Kỷ yếu hội nghị khoa học và công nghệ toàn quốc về cơ khí - Lần thứ IV
LỜI CẢM ƠN
Chân thành cảm ơn OPEN LAB, Bộ môn Cơ điện tử, Trường Đại học Sư phạm Kỹ
Thuật TP HCM đã giúp đỡ chúng tôi hoàn thành nghiên cứu này.
TÀI LIỆU THAM KHẢO
[1] Chris, U. et al., Autonomous Driving in Urban Environments: Boss and the Urban
Challenge. The DARPA Urban Challenge, Springer Tracts in Advanced Robotics, 2005,
Vol. 56, p. 1-59.
[2] Albagul, A., Dynamic modeling and adaptive traction control for mobile robots. Industrial
Electronics Society, 30th Annual Conference of IEEE, 2004, Vol. 1, p. 614-620.
[3] Ramaswamy, S.A.P., & Balakrishnan, S.N., Formation control of car-like mobile robots:
A Lyapunov function based approach. American Control Conference, 2008, p. 657-662.
[4] Kolski, S., Ferguson, D., Bellino, M., & Siegwart, R., Autonomous Driving in Structured
and Unstructured Environments. Intelligent Vehicles Symposium, IEEE, 2006, p. 558-563.
THÔNG TIN TÁC GIẢ
1.
Lê Phan Hưng. Khoa Công nghệ, Trường Đại học Cần Thơ.
Email: Phone number: +84982204560.
2.
Nguyễn Trường Thịnh. Khoa Cơ khí chế tạo máy, Trường Đại học Sư phạm Kỹ thuật
Thành phố Hồ Chí Minh.
Emai: Phone number: +84903675673.
38