Thiết kế hệ thống điều khiển cửa tự động sử dụng ATmega16
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.54 MB, 83 trang )
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
DANH MỤC TỪ VIẾT TẮT
Từ viết tắt
Tiếng Anh
Tiếng Việt
ADC
Analog – Digital Converter
Bộ chuyển đổi tín hiệu tương
tự sang tín hiệu số
ALU
Arithmetic Logic Unit
Bộ phận trong bộ xử lý trung
tâm
AVR
Automatic Voltage Regulator
Tự động điều áp
CISC
Complex Intruction Set Computer
Cấu trúc vi xử lý với tập lệnh
phức tạp
CPU
Central Processing Unit
Đơn vị xử lý trung tâm
I/O
Input/ Output
Vào/ Ra
IMR
Interrupt Mask Register
Thanh ghi mặt nạ ngắt
ISR
Interrupt Service Register
Thanh ghi phục vụ ngắt
LPM
Load Program Memory
Thanh ghi nhớ
MCU
OCR
Micro Control Unit
Output Compare Register
Bộ vi điều khiển
Giá trị so sánh đầu ra
PLC
Programmable Logic Controller
Bộ điều khiển logic lập trình
được
PWM
Pulse Width Modulation
Phương pháp điều chỉnh điện
áp ra tải
RAM
Random Access Memory
Bộ nhớ truy cập ngẫu nhiên
RISC
Reduced Intruction Set Computer
Cấu trúc vi xử lý với tập lệnh
đơn giản hóa
SDU
Serial Data Unit
Đơn vị dữ liệu/Byte dữ liệu
TCCR
Timer/Counter Control Register
TCNT
Timer/Counter Register
Thanh ghi điều khiển hoạt
động của Timer/Counter
Thanh ghi chứa giá trị vận
hành của Timer/Counter
1
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
TIFR
TIMSK
TTL
UART
USART
WGM
Lớp: CĐ ĐTVT – K8
Timer/Counter Interrupt Flag Register
Thanh ghi cờ ngắt cho T/C
Timer/Counter Interrupt Mask
Register
Transistor – Transistor Logic
Universal Asynchronous Receiver
Transmitter
Universal – Synchronous
Asynchronous serial Receiver &
Transmitter
Thanh ghi mặt nạ ngắt cho tất
cả Timer/Counter
Chuẩn giao tiếp nối tiếp
Bộ truyền nhận tín hiệu
không đồng bộ
Wave Generation Mode
Chế độ chọn dạng sóng
Bộ truyền nhận tín hiệu đồng
bộ và không đồng bộ
2
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
LỜI NÓI ĐẦU
Ngày nay, với sự phát triển của kinh tế, sự tiến bộ của khoa học kỹ thuật, các hệ
thống tự động điều khiển và giám sát thông minh đã được ứng dụng để phục vụ đời
sống con người. Trong đó hệ thống điều khiển cửa tự động là một trong những hệ
thống thông minh thường gặp nhất. Hiện nay thị trường cửa tự động đang được phát
triển mạnh mẽ với thiết kế đa dạng phong phú. Hệ thống cửa tự động thường được lắp
đặt tại các tòa nhà cao tầng, các trung tâm thương mại và trường học. Đó là những nơi
có đông người ra vào, vì vậy hoạt động của hệ thống điều khiển phải có tính thông
minh và tự động hóa cao. Trong các mạch điều khiển thì bộ phận không thể thiếu đó là
trung tâm điều khiển. Trung tâm điều khiển thường là các vi xử lý, vi điều khiển hay
PLC.
Trong quá học tập tại trường Đại học Thành Đô, em đã được biết đến các loại
vi điều khiển như: 8051, 8052, ATmega16…Với mong muốn tìm hiểu sâu hơn và tự
mình thiết kế hệ thống điều khiển cửa tự động nên em đã chọn đề tài “Thiết kế hệ
thống điều khiển cửa tự động sử dụng ATmega16”.
Nội dung của đồ án gồm những phần sau:
- Chương 1: Giới thiệu khái quát về hệ thống điều khiển cửa tự động.
- Chương 2: Phân tích và thiết kế phần cứng cho hệ thống điều khiển cửa tự
động.
- Chương 3: Lập trình điều khiển cho hệ thống cửa tự động.
Em xin được gửi lời cảm ơn đến các thầy cô trong khoa CNKT Điện Tử - Viễn
Thông, Trường Đại Học Thành Đô. Đặc biệt em xin gửi lời cảm ơn tới thầy giáo
hướng dẫn Th.S Lê Văn Thân đã tận tình hướng dẫn và định hướng cho em trong
suốt quá trình thực hiện đồ án này. Đồng thời em cũng xin gửi lời cảm ơn tới gia đình,
bạn bè đã cổ vũ, động viên, đóng góp ý kiến và giúp đỡ em rất nhiều trong thời gian
qua.
Em xin chân thành cảm ơn!
Hà Nội, ngày 01 tháng 06 năm 2014
Sinh viên thực hiện:
Nguyễn Thành Quân
3
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
CHƯƠNG 1: KHÁI QUÁT VỀ HỆ THỐNG ĐIỀU KHIỂN CỬA TỰ ĐỘNG
1.1. Giới thiệu về hệ thống cửa tự động
Với sự phát triển của kinh tế, sự tiến bộ của khoa học kỹ thuật, các hệ thống tự
động điều khiển và giám sát thông minh đã được ứng dụng để phục vụ đời sống con
người.
Các hệ thống thông minh như camera giám sát, hệ thống thang máy, hệ thống
cửa đóng mở tự động… chúng ta có thể bắt gặp chúng thường xuyên ở các tòa nhà cao
tầng, siêu thị, bệnh viện trường học… Trong đó hệ thống điều khiển cửa tự động là
một trong những hệ thống thông minh thường gặp nhất. Hiện nay thị trường cửa tự
động đang được phát triển mạnh mẽ với thiết kế đa dạng phong phú. Với mong muốn
tìm hiểu sâu hơn và tự mình thiết kế hệ thống điều khiển cửa tự động nên em đã chọn
đề tài “Thiết kế hệ thống điều khiển cửa tự động sử dụng ATmega16”.
Sau đây chúng ta sẽ tìm hiểu rõ hơn về một số hệ thống cửa tự động:
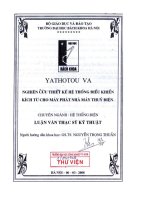
1.1.1. Cửa tự động xoay
Cửa tự động xoay tròn có 2 loại là cửa tự động xoay 3 hoặc 4 cánh được dùng
tại các ngân hàng, khách sạn, những tòa nhà có lưu lượng người qua lại lớn, tốc độ lưu
thông cao nhưng vẫn đảm bảo tách biệt giữa môi trường bên trong và bên ngoài, giữ
nhiệt và tránh gió bụi… Cửa có thể làm việc tự động hoàn toàn, trợ lực tự động (có sự
trợ giúp của động cơ điện để xoay cửa). Khung cửa được làm bằng nhôm hợp kim nên
bền, đẹp và nhẹ.
Cửa được gắn mắt thần cảm biến, khi có người tới gần cửa tự động hoạt động.
Khi không có người qua lại, cửa sẽ dừng ở trạng thái đóng để tiết kiệm năng lượng. Hệ
thống cảm biến đảm bảo an toàn cho người đi qua, khi vướng hành lý hoặc người đi
vào buồng cửa thì cửa sẽ dừng quay, sau khi hết vật cản thì cửa mới quay tiếp.
Hình 1.1: Hệ thống cửa tự động xoay 4 cánh
4
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Cửa có các chế độ làm việc thông minh như:
- Ban đêm: Tất cả các sensor đều không hoạt động, cửa được đóng và giữ bằng
lực của phanh điện.
- Thích nghi: Bình thường cửa quay liên tục với tốc độ chậm, khi có người vào
vùng phát hiện của radar thì cửa xoay theo tốc độ phù hợp với di chuyển của người (2
tốc độ này được cài đặt từ trước).
- Tự động: Bình thường cửa dừng, khi có người tới gần, cửa sẽ tự động quay để
người đi qua.
- Một chiều: Chỉ cho phép đi 1 chiều từ trong ra ngoài hoặc ngược lại.
- Bằng tay: Xoay cửa bằng tay, với tốc độ được kiểm soát không cho phép xoay
quá nhanh (tránh xoay tự nhiên quá nhanh bởi tác động của gió).
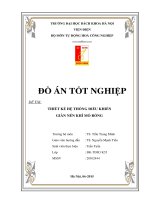
1.1.2. Cửa tự động trượt
Cửa trượt tự động được dùng nhiều ở những nơi đông người qua lại như trung
tâm thương mại hay các siêu thị lớn.
Hình 1.2: Hệ thống cửa tự động trượt 2 cánh
Cửa trượt tự động có loại 2 cánh và 4 cánh. Các chi tiết cơ khí chủ yếu được
làm bằng hợp kim nhôm chất lượng cao nên chịu lực tốt, bền, đẹp và nhẹ. Các vách
kính, cánh cửa trượt sử dụng kính an toàn, kính hộp (ở giữa các lớp kính được bơm khí
trơ) và hệ thống gioăng cho khung cánh nên có khả năng cách âm, cách nhiệt, tiết
kiệm năng lượng. Cửa trượt 4 cánh cho phép mở một lúc cả 4 cánh, sử dụng được
không gian mở lớn hơn so với cửa 2 cánh.
Cửa có các chế độ làm việc thông minh như:
- Tự động: cửa tự động mở khi có người qua rồi tự động đóng lại.
5
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
- Mở thường trực: cửa lúc nào cũng giữ mở.
- Mở một chiều: dành cho các cửa hàng, siêu thị. Khi đó chỉ cho phép người đi
qua một chiều từ bên trong ra.
- Ban đêm: khóa hoàn toàn chỉ mở được bằng chìa khóa.
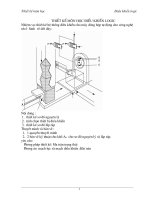
1.1.3. Hệ thống cửa tự động trượt gấp
Cửa tự động trượt gấp rất uốn lượn và mềm dẻo khi vận hành với sự đóng mở
từ 2 chiều, linh động dù người ra hay vào. Hệ thống trượt gấp giúp tiết kiệm không
gian trong nhà hơn.
Hình 1.3: Hệ thống cửa tự động gấp
Cửa tự động trượt gấp có các chức năng cơ bản sau:
- Tự động đóng mở cửa với những chế độ cài đặt trước.
- Tự động dò tìm hỏng hóc và thông báo khi có sự cố.
- Phát hiện ra chướng ngại vật theo hai hướng đóng và mở, mở cửa với một
khoảng thời gian dừng an toàn, giảm tốc độ khi cửa gần đóng lại hoàn toàn.
- Tự động mở cửa tối đa khi có dòng người đi từ hai phía.
- Điều khiển bằng Panel, cảm biến, nút bấm giúp người vận hành thao tác đơn
giản, dễ dàng.
Ưu điểm nổi bật của cửa tự động trượt gấp:
- Bộ truyền động có kích thước nhỏ gọn, công suất cao, không chiếm nhiều
không gian lắp đặt.
- Tốc độ đóng mở cao, êm và có thể điều chỉnh được, tăng hiệu quả sử dụng
- Hệ thống khung nhôm bảo vệ kính.
- Có hệ thống gioăng phớt làm kín cả phần giữa và lưng cửa giúp cách âm, cách
nhiệt tốt, tiết kiệm điện điều hòa hơn.
6
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
- Sensor cảm biến bằng chuyển động, bất kỳ người hay vật chuyển động, cửa
đều nhận biết được, tính năng cao và an toàn hơn.
- Thường có từ một đến hai bộ cảm biến an toàn để tránh đóng cửa khi có người
hay vật chưa qua khỏi cửa.
- Ray cửa có cao su lót ray để giảm ồn.
- Khung của bộ truyền động chính đồng nhất suốt chiều dài cửa.
1.1.4. Sơ đồ khối của hệ thống
Trong các hệ thống cửa tự động đã được trình bày ở trên, hệ thống điều khiển
sẽ phụ thuộc vào từng loại cửa và giá thành của chúng. Tuy nhiên về cơ bản thì hệ
thống điều khiển cửa gồm những khối cơ bản sau:
Khối công suất
(Mạch cầu H)
Khối chấp hành
(Motor DC, cơ khí)
Khối hiển thị
(LCD)
MCU
(Micro Control Unit)
Khối điều khiển
(Keypad)
Khối cảm biến
Khối nguồn
(Power)
Hình 1.4: Sơ đồ khối của hệ thống điều khiển
Chức năng của các khối:
Khối nguồn (Power): Tạo ra các mức điện áp khác nhau để cung cấp nguồn
điện cho các khối khác hoạt động.
Khối vi điều khiển MCU (Micro Control Unit): Thu nhận tín hiệu cảm biến và
điều khiển hoạt động của hệ thống theo các chương trình được lập trình sẵn.
Khối điều khiển (Keypad): Nhập tín hiệu điều khiển từ bàn phím vào trong chíp
vi điều khiển. Khối này thường được sử dụng để cài đặt các chế độ hoạt động cho hệ
thống
Khối cảm biến: Sử dụng ánh sáng phát ra từ bộ phận phát để phát hiện sự hiện
diện của vật thể, cấp tín hiệu điều khiển vào vi điều khiển. Khối này thường dùng các
cảm biến quang để phát hiện vật thể di chuyển, khi có vật thể đến lại gần thì sẽ có tín
7
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
hiệu gửi về cho vi điều khiển hoạt động. Ngoài ra, khối này còn có các công tắc hành
trình để phát hiện vị trí cửa cửa khi di chuyển hết hành trình.
Khối công suất (Mạch cầu H): Điều khiển hoạt động cho khối chấp hành (điều
khiển chiều quay và tốc độ cho động cơ DC).
Khối chấp hành (Motor DC và phần cơ khí): Làm việc theo tín hiệu đưa vào từ
khối công suất.
Phần tiếp theo của chương 1 sẽ giới thiệu cơ sở lý thuyết và nguyên lý hoạt
động của các thiết bị được sử dụng trong hệ thống.
1.2. Động cơ DC và cách điều khiển động cơ bằng xung PWM
Trong rất nhiều máy móc cần đến các loại động cơ điện một chiều với những
mức công suất to nhỏ khác nhau phù hợp với chức năng hoạt động của nó.
Động cơ điện một chiều dùng để biến đổi điện năng thành cơ năng, hay cơ năng
thành điện năng.
Động cơ điện một chiều có rất nhiều loại như: động cơ điện một chiều kích từ
độc lập, kích từ song song, kích từ nối tiếp, kích từ hỗn hợp hay kích từ bằng nam
châm vĩnh cửu. Hình 1.4 giới thiệu một số loại động cơ điện một chiều thường gặp.
Ngày nay động cơ điện một chiều được sử dụng rộng rãi và phổ biến trong các
dây truyền thiết bị, các cơ cấu vận hành như thang máy, máy nâng… Nó đóng vai trò
quan trọng và cần thiết trong quá trình công nghiệp hóa và hiện đại hóa. Với cấu tạo
không quá phức tạp và khó khăn cho chúng ta chế tạo và sửa chữa. Góp phần cải thiện
cuộc sống cũng như sức lao động của con người.
Hình 1.5: Một số loại động cơ điện một chiều
8
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
1.2.1. Cấu tạo của động cơ điện một chiều
Động cơ điện một chiều được cấu tạo gồm các phần chính: stato với cực từ,
roto với dây quấn và cổ góp với chổi than.
Hình 1.6: Cấu tạo của động cơ một chiều DC
a) Stato
Còn gọi là phần cảm, gồm lõi thép bằng thép đúc là mạch từ vừa là vỏ máy.
Các cực từ chính có dây quấn kích từ.
Hình 1.7: Cấu tạo của Stato
b) Roto
Roto của máy điện một chiều gọi là phần ứng, gồm lõi thép và dây quấn phần
ứng, lõi thép do các lá thép ghép lại, có dập lỗ và rãnh để đặt dây quấn và thông gió.
Mỗi phần tử dây quấn có nhiều vòng dây, hai đầu nối với hai phiến góp.
9
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Hình 1.8: Cấu tạo của Roto
c) Cổ góp và chổi điện
Cổ góp và chổi điện có vai trò nối khung dây của Roto với các điện cực cố định
trên thân động cơ để dễ dàng cung cấp dòng điện cho động cơ hoạt động hoặt lấy điện
ra khi hoạt động ở chế độ máy phát.
Hình 1.9: Cấu tạo cổ góp và chổi than
Cổ góp gồm nhiều phiến đồng ghép lại có cách điện, có dạng hình trụ, gắn ở
đầu trục roto. Chổi than làm bằng than graphit. Các chổi than tỳ sát lên cổ góp nhờ lò
xo và chổi than gắn trên nắp máy.
1.2.2. Nguyên lý hoạt động của động cơ điện một chiều
Động cơ điện một chiều thường hoạt động ở 2 chế độ hoạt động chính:
a) Chế độ máy phát
Khi động cơ sơ cấp quay phần ứng, các thanh dẫn của dây quấn phần ứng cắt từ
trường của cực từ, cảm ứng các sức điện động. Chiều sức điện động cảm ứng xác định
theo quy tắc bàn tay phải. Như hình vẽ từ trường hướng từ cực N đến cực S (từ trên
xuống dưới), chiều quay phần ứng ngược chiều kim đồng hồ, ở thanh dẫn phía trên,
sức điện động có chiều từ b đến a. Ở thanh dẫn phái dưới sức điện động có chiều từ d
10
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
đến c. Sức điện động phần tử bằng hai lần sức điện động thanh dẫn. Nếu nối hai chổi
than A và B với tải, trên tải có dòng điện, điện áp máy phát có cực dương ở chổi than
A và cực âm ở chổi than B.
Hình 1.10: Chiều của sức điện động cảm ứng
Khi phần ứng quay được nửa vòng, vị trí của phần tử thay đổi, thanh ab ở cực S,
thanh dc ở cực N, sức điện động thanh dẫn đổi chiều. Nhờ có chổi điện đứng yên chổi
điện A vẫn nối phiến góp phía trên, chổi than B nối phiên góp phía dưới, nên chiều
dòng điện ở mạch ngoài không đổi. Ta có máy phát điện một chiều với cực dương chổi
than A, cực âm chổi than B. Để điện áp lớn và ít đập mạch, dây quấn phải có nhiều
phần tử, nhiều phiến đổi chiều. Ở chế độ máy phát điện dòng điện phần ứng I ư cùng
chiều với sức điện động phần ứng Eư.
Phương trình cân bằng điện áp trên hai cực của máy phát sẽ là:
U = Eư - Iư.Rư (V)
(1.1)
Trong đó: Eư: sức điện động cảm ứng (V).
Iư: dòng điện cảm ứng (A).
Rư: điện trở cảm ứng (Ω).
b) Chế độ động cơ điện
Khi cho điện áp U vào chổi than A và B, trong dây quấn phần ứng có
dòng điện. Các thanh dẫn ab, cd có dòng điện nằm trong từ trường, sẽ chịu lực tác
dụng làm cho roto quay. Chiều lực từ xác định theo quy tắc bàn tay trái.
11
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Hình 1.11: Nguyên lý hoạt động ở chế độ động cơ điện
Pha 1: Từ trường của Roto cùng cực với Stato sẽ đẩy nhau tạo ra chuyển động
quay của Roto.
Pha 2: Roto tiếp tục quay.
Pha 3: Bộ phận chỉnh điện sẽ đổi cực sao cho từ trường giữa Stato và Roto cùng
chiều và trở lại pha 1.
Hình 1.12: Chiều quay của Roto
Khi phần ứng quay được nửa vòng, vị trí các thanh dẫn ab, cd đổi chỗ cho nhau,
do có phiến góp, đổi chiều dòng điện, giữ cho lực tác dụng không đổi, đảm bảo động
cơ có chiều không đổi.
Khi động cơ quay, các thanh dẫn cắt từ trường, sẽ cảm ứng sức điện động E ư.
Chiều sức điện động xác định theo quy tắc bàn tay phải. Ở chế độ động cơ điện chiều
sức điện động Eư ngược chiều với dòng điện Iư, nên Eư còn gọi là sức phản điện.
Phương trình cân bằng điện áp sẽ là:
U = Eư + RưIư (V)
(1.2)
Khi đó công suất điện từ và momen điện từ được xác định như sau:
p.N
.n.φ .I u ,
Pđt = Eư.Iư = 60.a
(W)
(1.3)
Trong đó: P: là công suất (W).
12
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
n: tốc độ quay (Vòng/phút).
ϕ : từ thông (H/m2).
a : số nhánh song song.
N: số vòng dây.
p: số đôi cực.
Iư: dòng điện cảm ứng (A).
Eư: sức điện động cảm ứng (V).
Pđt
p.N
2π .n
=
.I u , .φ = K M .I u , .φ (ω r =
)
ω
2
π
.
a
60
r
Momen điện từ: Mđt =
(N/m)
(1.4)
Trong đó: ω : tốc độ động cơ (rad/s).
P: công suất (W).
a: số nhánh song song.
N: số vòng dây.
KM: hằng số momen.
p.N
Mđt = KM.Iư.Φ (KM = 2π .a : phụ thuộc vào cấu tạo dây quấn)
Theo phân tích hoạt động của động cơ điện như trên ta thấy:
- Chiều quay của động cơ điện sẽ phụ thuộc vào dấu của điện áp đặt vào 2 đầu
của động cơ.
- Tốc độ quay sẽ phụ thuộc vào cường độ dòng điện qua khung dây của động cơ
hay nói cách khác là phụ thuộc vào công suất của dòng điện đi qua động cơ.
Phần tiếp theo của đồ án sẽ phân tích cách điều khiển động cơ bằng xung
PWM, đây là cách điều khiển động cơ bằng cách thay đổi công suất trung bình của
dòng điện qua động cơ.
1.2.3. Khái niệm xung PWM
Phương pháp điều xung PWM (Pulse Width Modulation) là phương pháp điều
chỉnh điện áp ra tải, hay nói cách khác, là phương pháp điều chế dựa trên sự thay đổi
độ rộng của chuỗi xung vuông, dẫn đến sự thay đổi điện áp ra.
Các PWM khi biến đổi thì có cùng 1 tần số và khác nhau về thời gian t on và thời
gian toff.
13
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Hình 1.13: Đồ thị dạng xung điều chế PWM
Trên đây là đồ thị dạng xung khi điều khiển bằng PWM. Với độ rộng xung đầu
ra tương ứng và được tính bằng %. Tùy thích do chúng ta điều khiển.
Một tín hiệu PWM thường có chu kỳ không đổi (trừ chế độ Phase Correct and
Frequency Correct PWM). Sự khác nhau giữa các tín hiệu thường do sự thay đổi thời
gian ton và toff. Dễ hiểu hơn là cứ thời gian ON tăng thì thời gian OFF sẽ phải giảm và
ngược lại để tổng thời gian ON và thời gian OFF là không đổi, đó là chu kỳ của PWM.
Một sự khác biệt của của tín hiệu sóng vuông và PWM là tín hiệu sóng vuông
có thời gian ON bằng thời gian OFF. Xung vuông là một trường hợp đặc biệt của
PWM khi thời gian ON bằng với thời gian OFF. Sau đây là một vài khái niệm cơ bản
về xung PWM:
(1.5)
ton: thời gian ON (ON time)
toff: thời gian OFF (OFF time)
Chu kỳ T (Time period) = thời gian ton (ON time) + thời gian toff (OFF time) và
là hằng số, một lần nữa ta có thể thấy trong công thức nếu thời gian ON tăng thì thời
gian OFF sẽ giảm để tổng của chúng là hằng số.
Và người ta đưa ra thêm một khái niệm là hiệu suất làm việc (duty cycle). Công
thức tính như trên. Nó có nghĩa là tỷ số thời gian xung ON trên chu kỳ. Thường thì
tính theo đơn vị phần trăm (%).
Xét tín hiệu xung như hình vẽ:
14
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Điện áp trung bình của tín hiệu là:
Nếu D (Duty Cycle) càng lớn thì điện áp trung bình càng cao.
Ứng dụng của xung PWM
PWM được sử dụng rất phổ biến trong các lĩnh vực điện tử, tự động hóa, viễn
thông…
Nguyên tắc điều khiển PWM là điều khiển năng lượng đầu ra (dòng điện, điện
áp) đi qua các thiết bị điện tử ví dụ như cường độ dòng điện đi qua động cơ, đi qua
LED…
Sau đây là ví dụ đóng cắt của một van bán dẫn. Dùng van đóng cắt bằng
Mosfet.
Hình 1.14: Sơ đồ đóng cắt bằng Mosfet
M: là động cơ DC, tốc độ quay phụ thuộc vào cường độ dòng điện chạy qua
cuộn dây trong động cơ (Id).
15
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Q1: là MOSFET kênh N, có tác dụng là khóa điện tử.
Khi: UGS > 0 thì Q1 đóng.
USS < 0 thì Q1 mở.
R1: là điện trở, có tác dụng bảo vệ Q1.
Khi đó nếu có xung PWM kích vào chân G, thì điện trở tại U GS như hình 1.14a
thì Id được mô tả như hình 1.14b.
Hình 1.14: Sơ đồ xung của van điều khiển và đầu ra
Trên đây là mạch nguyên lý điều khiển tải bằng PWM và giản đồ xung của
chân điều khiển và dạng điện áp đầu ra khi dùng PWM.
Nguyên lý: Trong khoảng thời gian 0 – t0 ta cho van G mở toàn bộ điện áp
nguồn Ud được đưa ra tải. Còn trong khoảng thời gian t 0 - T cho van G khóa, cắt
nguồn cung cấp cho tải. Vì vậy với t 0 thay đổi từ 0 cho đến T ta sẽ cung cấp toàn bộ,
một phần hay khóa hoàn toàn điện áp cung cấp cho tải.
Công thức tính giá trị trung bình của điện áp ra tải :
Gọi t1 là thời gian xung ở sườn dương (khóa mở) còn T là thời gian của cả sườn
âm và dương, Umax là điện áp nguồn cung cấp cho tải.
=> Ud = Umax.( t1/T) (V)
hay Ud = Umax.D
với D = t1/T là hệ số điều chỉnh và được tính bằng % tức là PWM.
Như vậy nhìn trên đồ thị dạng điều chế xung thì ta có: Điện áp trung bình trên
tải sẽ là :
+ Ud = 12.20% = 2.4V (với D = 20%)
+ Ud = 12.40% = 4.8V (với D = 40%)
+ Ud = 12.90% = 10.8V (với D = 90%)
1.3. Cảm biến quang
1.3.1. Khái niệm về cảm biến quang
Cảm biến là thiết bị dùng để cảm nhận biến đổi các đại lượng vật lý và các đại
lượng không có tính chất điện cần đo thành các đại lượng có thể đo và xử lý được.
16
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Các đại lượng đo (M) thường không có tính chất điện (như nhiệt độ, áp suất,
trọng lượng…) tác động lên cảm biến cho ta đại lượng đặc trưng (S) mang tính chất
điện như (như điện tích, điện áp, dòng điện hay trở kháng) chứa đựng thông tin cho
phép xác định giá trị của đại lượng đó.
Đặc trưng (s) là hàm của đại lượng cần đo (M)
S = f(M)
Để biểu diễn sự phụ thuộc của S vào M một cách trực quan hơn, người ta
thường sử dụng đường đặc trưng:
Hình 1.15: Đường đặc trưng
Hàm số S = f(M) thể hiện đường đặc trưng giúp người đo suy đoán và xác định
được giá trị của S
Người ta gọi (S) là đại lượng đầu ra hoặc phản ứng của cảm biến. (M) là đại
lượng đầu vào hay kích thích ( có nguồn gốc đại lượng cần đo). Thông qua đo đạc (S)
cho phép nhận biết giá trị (M).
Cảm biến quang điện có khả năng phát hiện nhiều dạng vật thể khác nhau: như
chai nhựa, chai thủy tinh, thùng giấy, linh kiện điện tử, vật thể kim loại, gỗ... Đây là
thiết bị được sử dụng phổ biến trong tự động hóa và điện tử công nghiệp.
Đặc điểm của cảm biến quang điện:
Phát hiện vật từ khoảng cách xa lên đến 20m, không bị hao mòn, có tuổi thọ
cao, thời gian đáp ứng nhanh, phát hiện mọi loại vật thể.
1.3.2. Cấu tạo của cảm biến quang điện
Cảm biến quang điện cấu tạo gồm 3 phần chính:
a) Bộ phát sáng:
Bộ phát sáng của cảm biến quang hiện nay thường dùng là các đèn LED. Ánh
sáng được phát ra theo xung. Tần số xung sẽ giúp cảm biến phân biệt được ánh sáng
của cảm biến phát ra và ánh sáng từ các nguồn khác. Các loại LED thông dụng nhất là
17
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
LED đỏ, LED hồng ngoại hoặc LED laze. Một số dòng cảm biến đặc biệt dùng LED
trắng hoặc xanh lá. Ngoài ra cũng có LED vàng.
b) Bộ thu sáng:
Bộ thu sáng là một transistor quang. Bộ phận này nhận ánh sáng và chuyển đổi
thành tín hiệu điện tỉ lệ, nó chính là IC mà có tất cả bộ phận quang, khuếch đại, mạch
xử lý. Bộ phận thu có thể nhận ánh sáng trực tiếp từ bộ phát (Cảm biến thu - phát).
c) Mạch tín hiệu ra:
Mạch đầu ra chuyển tín hiệu analog từ tansistor quang thành tín hiệu On/Off.
Khi lượng ánh sáng thu được vượt quá ngưỡng xác định, tín hiệu ra của cảm biến được
kích hoạt. Tùy theo nguồn cấp 1 chiều hay xoay chiều mà cảm biến có ngõ ra
NPN/PNP hoặc relay.
1.3.3. Các chế độ hoạt động của cảm biến quang
Cảm biến quang có 4 chế độ hoạt động cụ thể sau:
a) Chế độ thu phát
Cảm biến dạng thu phát có bộ phát và thu sáng tách riêng. Bộ phát truyền ánh
sáng đi và bộ thu nhận ánh sáng. Nếu có vật thể chắn nguồn sáng giữa hai phần này thì
sẽ có tín hiệu ra của cảm biến.
Ưu điểm:
Khoảng cách phát hiện xa (ví dụ E3Z-T82 được tới 30m), phát hiện tốt trong
môi trường nhiều bụi.
Khả năng xác định vị trí chính xác của vật thể.
Độ tin cậy cao, phát hiện được mọi loại vật thể (trừ loại trong suốt).
Nhược điểm:
Mất nhiều thời gian để chỉnh vị trí lắp đặt.
Mất nhiều thời gian nối dây vì có 2 dây riêng biệt.
Giá thành sản phẩm cao.
Ứng dụng:
Kiểm soát cổng ra vào: Thông thường cổng ra vào có kính mờ/tối che ngoài.
Bởi vậy cần loại thu phát có cường độ sáng cao để xuyên qua lớp kính. Cảm biến này
có thể dùng ở các môi trường khắc nghiệt: ví dụ trạm rửa xe, hoặc môi trường nhiều
bụi, cần có cảm biến cường độ sáng cao.
Các ứng dụng rộng rãi khác trong tự động hóa công nghiệp, đặc biệt trong
trường hợp cần xác định vị trí của vật thể.
18
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
b) Chế độ phản xạ gương
Các cảm biến trong chế độ này thì bộ phát truyền ánh sáng tới một gương phản
chiếu lăng kính đặc biệt, và phản xạ lại tới bộ thu sáng của cảm biến. Nếu vật thể xen
vào luồng sáng, cảm biến sẽ phát tín hiệu ra.
Cảm biến quang phản xạ gương là dạng cảm biến quang phổ biến nhất trong
công nghiệp. Loại này có sự kết hợp tốt các yếu tố như phát hiện tin cậy, khoảng cách
vừa đủ và giá thành hợp lý.
Ưu điểm:
- Giá thành thấp hơn loại thu phát.
- Lắp đặt dễ hơn loại thu phát.
- Chỉnh định dễ dàng.
- Với vật thể có bề mặt sáng bóng có thể làm cảm biến không phát hiện được,
có thể dùng kính lọc phân cực.
Nhược điểm:
- Khoảng cách phát hiện ngắn hơn loại thu phát (E3Z-R: chỉ được 4-5m).
- Vẫn cần 2 điểm lắp đặt cho cảm biến và gương.
- Cảm biến phản xạ gương loại 2 thấu kính thường không phát hiện được vật ở
một số khoảng cách ngắn nhất định.
Ứng dụng:
- Phát hiện vật trên băng chuyền.
- Các ứng dụng phổ cập trong nhà máy.
- Phát hiện chai nhựa trong (khi dùng loại thích hợp).
- Kiểm soát cửa/cổng ra vào trong các tòa nhà.
19
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
c) Chế độ phản xạ khuếch tán
Cảm biến dạng này truyền ánh sáng từ bộ phát tới vật thể. Vật này sẽ phản xạ
lại một phần ánh sáng (phản xạ khuếch tán) ngược trở lại bộ thu của cảm biến, kích
hoạt tín hiệu ra.
Ưu điểm: Lắp đặt đơn giản, dễ dàng, chỉ cần 1 điểm lắp đặt duy nhất.
Nhược điểm:
- Khoảng cách phát hiện ngắn (do chỉ phát hiện được một phần ánh sáng phản
xạ). Ví dụ loại E3Z-D: có khoảng cách phát hiện tối đa 1m.
- Tỉ lệ lỗi đen/trắng cao: khoảng cách phát hiện phụ thuộc nhiều vào màu sắc,
kích thước, tính chất bề mặt của vật thể. Bởi vậy việc phát hiện vật có thể khó khăn
nếu có nền màu đen sau vật. Độ nhạy và độ tin cậy kém hơn loại thu phát và phản xạ
gương.
- Thông thường, nếu không cần độ chính xác cao, hoặc khó khăn trong việc lắp
đặt gương, người ta sẽ dùng loại phản xạ khuếch tán.
Ứng dụng:
- Các ứng dụng phổ cập trong nhà máy: như phát hiện vật trên băng chuyền.
- Công nghiệp chế tạo gạch men (dùng loại nguồn sáng rộng).
d) Chế độ hạn chế nhiễu của nền (BGS)
Đây là cảm biến phản xạ khuếch tán đặc biệt. Trong khi loại thường phát hiện
tổng lượng ánh sáng nhận được, loại BGS phát hiện góc của ánh sáng phản xạ. Công
nghệ này có tên là triangulation (phép đạc tam giác). Bởi vậy, độ nhạy của cảm biến sẽ
không phụ thuộc vào màu sắc vật hay nền sau vật.
Để làm điều này, cảm biến dùng 2 điôt cho bộ thu hoặc 1 mạch điôt/PSD.
Ưu điểm: Chỉ cần 1 điểm lắp đặt duy nhất. Có độ chính xác và tin cậy cao hơn loại
phản xạ thường (bị lỗi trắng/đen). Có thể chỉnh khoảng cách phát hiện ở 1 mức nhất
định.
Nhược điểm:
- Khoảng cách phát hiện ngắn: ví dụ E3Z-LS: chỉ được tối đa 200mm
- Cảm biến BGS ngày càng phổ biến hơn trong các ứng dụng công nghiệp vì
không cần gương và phát hiện tin cậy. Thông thường cảm biến BGS lắp đặt bên cạnh
hoặc bên trên băng chuyền.
1.4. Giới thiệu về vi điều khiển ATmega16
Trong các mạch điều khiển thì bộ phận không thể thiếu đó là bộ điều khiển
trung tâm. Bộ điều khiển trung tâm có thể là các vi xử lý, vi điều khiển hoặc PLC.
Trong đồ án này, bộ điều khiển trung tâm được vi điều khiển ATmega16 đảm nhiệm.
20
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
1.4.1. Khái quát các tính năng
Hình 1.16: Sơ đồ cấu trúc của ATmega16
ATmega16 là vi điều khiển 8 bit dựa trên kiến trúc RISC. Với khả năng thực
hiện mỗi lệnh trong vòng 1 chu kỳ xung Clock, ATmega16 có thể đạt được tốc độ tối
đa 1MIPS/Mhz (1 triệu lệnh/s/MHz).
Atmega16 là bộ vi điều khiển CMOS 8 bit tiêu thụ điện năng dựa trên kiến trúc
RISC (Reduced Intruction Set Computer). Vào ra Analog – Digital và ngược lại. Với
công nghệ này cho phép các lệnh thực thi chỉ trong một chu kì xung nhịp, vì thế tốc độ
xử lý dữ liệu có thể đạt đến 1 triệu lệnh trên giây ở tần số 1 Mhz. Vi điều khiển này
cho phép người thiết kế có thể tối ưu hóa chế độ tiêu thụ năng lượng mà vẫn đảm bảo
tốc độ xử lý.
Atmega16 có tập lệnh phong phú về số lượng với 32 thanh ghi làm việc đa
năng. Toàn bộ 32 thanh ghi đều được nối trực tiếp với ALU (Arithmetic Logic Unit),
cho phép truy cập 2 thanh ghi độc lập bằng một chu kì xung nhịp. Kiến trúc đạt được
cố tốc độ xử lý nhanh gấp 10 lần vi điều khiển dạng CISC (Complex Intruction Set
Computer), thông thường.
21
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
o
o
o
o
o
o
o
Khi sử dụng vi điều khiển Atmega16, có rất nhiều phần mềm được dùng để lập
trình bằng nhiều ngôn ngữ khác nhau đó là: Trình dịch Assembly như AVR studio của
Atmel, trình dịch C như win AVR, CodeVisionAVR C, Atmel Studio… Trình dịch C
đã được nhiều người dùng và đánh giá tương đối mạnh, dễ tiếp cận đối với những
người bắt đầu tìm hiểu AVR, đó trình dịch CodeVisionAVR C. Phần mềm này hỗ trợ
rất nhiều ứng dụng và có nhiều hàm có sẵn nên việc lập trình tốt hơn.
1.4.2. Đặc trưng của Atmega16
Atmelga16L có đầy đủ tính năng của họ AVR, về giá thành so với các loại khác
thì giá thành là vừa phải khi nghiên cứu và làm các công việc ứng dụng tới vi điều
khiển.
Hiệu suất cao (high performance), là loại vi điều khiển AVR 8 bit công suất thấp.
Cấu trúc lệnh đơn giản, thời gian thực thi lệnh như nhau.
130 lệnh thực thi trong vòng 1 chu kì chip.
32x8 thanh ghi công dụng chung
Đầy đủ các xử lý tĩnh.
Hỗ trợ 16 MIPS khi hoạt động ở tần số 16 Mhz.
Tích hợp bộ nhân 2 thực hiện trong 2 chu kì chip.
Bộ nhớ chương trình và dữ liệu không bay hơi.
16K byte trong hệ thống flash khả trình có thể nạp và xóa 1000 lần.
Tùy chọn khởi động phần mã với các bit nhìn độc lập trong hệ thống bằng cách vào
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
chương trình khởi động chip.
512 byte EEPROM có thể ghi và xóa 100.000 lần.
Lập trình khóa cho phần mềm bảo mật.
Tính năng ngoại vi.
2 bộ timers/counters 8 bit với các chế độ đếm riêng rẽ và kiểu so sánh.
1 bộ timer/counter 16 bit với các chế độ đếm riêng rẽ, kiểu so sánh và kiểu bắt sự kiện.
Bộ đếm thời gian thực với máy tính dao động riêng rẽ.
4 kênh băm xung PWM.
8 kênh ADC 10 bit.
Byte định hướng 2 đường giao tiếp nối tiếp.
Giao tiếp USART nối tiếp khả trình.
Giao tiếp SPI nối tiếp chủ/tớ.
Bộ định thời khả trình giám sát xung nhịp của 1 chip 1 cách riêng rẽ.
Tích hợp bộ so sánh tín hiệu tương tự.
Giao tiếp JTAG.
Các tính năng đặc biệt của vi điều khiển.
Chế độ bật nguồn reset và phát hiện Brown – Out khả trình.
Tích hợp mạch dao động RC bên trong.
Các ngắt trong và ngoài.
6 chế độ nghỉ: rảnh rỗi, giảm nhiễu ADC, tiết kiệm năng lượng, nguồn thấp, Standby
và Extended Stanby.
Vào/ra và các gói dữ liệu.
22
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
o
o
o
Lớp: CĐ ĐTVT – K8
32 chân vào ra khả trình.
40 – pin PDIP và 44 lead TQFP.
Điện áp sử dụng.
4,5 – 5,5V dùng với Atmega16.
Tốc độ xung nhịp dùng cho chip: 0 – 16 Mhz cho Atmega16.
1.4.3. Sơ đồ chân của ATmega16
Hình 1.17: Sơ đồ chân của chip ATmega16.
Chức năng các chân:
Atmega16 gồm 40 chân chia làm 4 PORT A, B, C, D, mỗi PORT 8 chân và 8
chân còn lại làm chức năng đặc biêt. Các chân làm các nhiệm vụ cơ bản sau:
Chân 1 đến 8: Cổng nhập xuất dữ liệu song song B (PORTB) nó có thể được sử
dụng các chức năng đặc biệt thay vì xuất nhập dữ liệu.
Chân 1: (XCK/T0) T0 là ngõ vào của bộ đếm ngoài counter 0, XCK là chân I/0
Clock của USART.
Chân 2: (T1) ngõ vào của bộ đếm counter 1.
Chân 3: (AIN/INT2) AIN0: ngõ vào Prossitive của bộ so sánh analog, INT2:
ngõ ngắt ngoài 2.
Chân 4: OC0/AIN1: AIN1 là ngõ vào Negative của bộ so sánh analog, OC0 là
ngõ ra so sánh của Timer/Counter 0.
Chân 5: SS là ngõ vào chọn slave của SPI.
Chân 6: MOSI: Master output/ Slave input của SPI.
Chân 7: MISO: Master input/ Slave output của SPI.
Chân 8: SCK chân clock của SPI.
Chân 9: RESET để đưa chip về trạng thái ban đầu.
Chân 10: VCC cấp nguồn nuôi cho vi điều khiển.
Chân 11, 31: GND 2 chân này được nối với nhau và nối đất.
23
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
Chân 12, 13: 2 chân XTAL2 và XTAL1 dùng để đưa xung nhịp từ bên ngoài
vào chip.
Chân 14: RXD ngõ vào USART.
Chân 15: TXD ngõ ra USART.
Chân 16: INT0 ngõ vào ngắt ngoài 0.
Chân 17: INT1 ngõ vào ngắt ngoài 1.
Chân 18: OC1B ngõ ra so sánh B của Timer/Counter1.
Chân 19: OC1A ngõ ra so sánh A của Timer/Counter 1.
Chân 20: ICP1 chân bắt mẫu của Timer/Counter 1.
Chân 21: OC2 ngõ so sánh Timer/Counter 2.
Chân 22 đến 29: Cổng nhập xuất dữ liệu song song C (PORTC) nó có thể được
sử dụng các chức năng đặc biệt thay vì nhập xuất dữ liệu.
Chân 22: SCL chân Clock của giao thức Two – Wire.
Chân 23: SDA chân data I/O của giao thức Two – Wire.
Chân 24: TCK chân Clock test JTAG.
Chân 25: TMS chân chọn mode test JTAG.
Chân 26: TDO chân data out mode test JTAG.
Chân 27: TD1 chân data in mode test JTAG.
Chân 28: TOSC1 chân 1 bộ dao động Timer 1.
Chân 29: TOSC2 chân 2 bộ dao động Timer 2.
Chân 30: AVCC cấp điện áp so sánh cho bộ ADC.
Chân 32: AREF cấp điện áp so sánh tín hiệu vào ADC.
Chân 33 đến 40: Cổng vào ra dữ liệu song song A (PORTA) ngoài ra nó còn
được tích hợp bộ chuyển đổi tín hiệu tương tự sang tín hiệu số ADC (Analog to digital
converter).
24
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân
Khoa: CNKT Điện tử - Viễn thông
Lớp: CĐ ĐTVT – K8
1.5. Giới thiệu về Text LCD
Để giúp hệ thống thân thiện với người dùng thh hệ thống thường có các bộ phận
giao tiếp với người dùng như: màn hình cảm ứng hay text LCD.
LCD 16L là các loại màn hình tinh thể lỏng nhỏ dùng để hiển thị các dòng chữ
hoặc số trong bảng mã ASCII. Không giống các loại LCD lớn, LCD 16L được chia
sẵn thành từng ô và ứng với mỗi ô chỉ có thể hiển thị một ký tự ASCII. Cũng vì lý do
chỉ hiện thị được ký tự ASCII nên LCD 16L này được gọi là Text LCD (để phân biệt
với Graphic LCD có thể hiển thị hình ảnh). Mỗi ô của LCD 16L bao gồm các “chấm”
tinh thể lỏng, việc kết hợp “ẩn” và “hiện” các chấm này sẽ tạo thành một ký tự cần
hiển thị. Trong LCD 16L, các mẫu ký tự được định nghĩa sẵn. Kích thước của LCD
16L được định nghĩa bằng 16 ký tự có thể hiển thị trên 1 dòng và có tổng số 2 dòng.
Hình 1.18: LCD 16L.
Text LCD 16x2 khi sản xuất đã được tích hợp sẵn chip HD44780 của hãng
Hitachi. HD44780U là bộ điều khiển cho các Text LCD dạng ma trận điểm (dotmatrix), chip này có thể được dùng cho các LCD có 1 hoặc 2 dòng hiển thị.
HD44780U có 2 mode giao tiếp là 4 bit và 8 bit. Nó chứa sẵn 208 ký tự mẫu kích
thước font 5x8 và 32 ký tự mẫu font 5x10 (tổng cộng là 240 ký tự mẫu khác nhau).
1.6. Công cụ thiết kế mạch và lập trình cho vi điều khiển
1.6.1. Phần mềm thiết kế mạch Altium Designer
Phần mềm thiết kế mạch tự động Altium Designer là một môi trường thiết kế
điện tử đồng nhất, tích hợp cả thiết kế nguyên lý, thiết kế mạch in PCB, lập trình hệ
thống nhúng và FPGA.
25
Đồ án tốt nghiệp
Sv: Nguyễn Thành Quân