bài tập lớn điều khiển số
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (135.49 KB, 7 trang )
CHƯƠNG 1. ĐỘNG CƠ MỘT CHIỀU
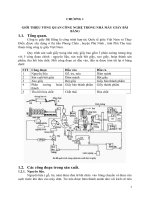
1. Sơ đồ khối của động cơ một chiều
Các tham số cơ bản động cơ:
Ra = 550 m
Ω
La = 4,2 mH
Km= 38
Ke = 236
J = 0,0122 kgm2
Ttb = 1,5 ms
φm
= 0,04
Phương trình toán :
U a = Ra .i a + La
dw
dt
mdc = mc + J
Trong đó :
e a = k e. ωϕ m
m dc = k m i a φ m
Ta =
Đặt :
di a
+ ea
dt
La
Ra
Hình 1.1 Sơ đồ khối của động cơ một chiều
Sau khi tổng hợp ta có hàm truyền của động cơ 1 chiều như sau
G(s)=
0, 018.1,52
0, 0027
0, 0122s.(0, 00764s + 1)
=
2
0, 018.1,52.9, 44
0, 000093s + 0, 0122s + 0, 0258
1+
0, 0122s.(0, 00764s + 1)
Đặc tính dòng điện và tôc độ của động cơ như sau:
Hình 1.2 Đặc tính tốc độ của động cơ
Hình 1.3 Đặc tính dòng điện của động cơ
Mạch vòng điều khiển tốc độ và dòng điện của động cơ:
Hình 1.4 Mạch vòng điều khiển tốc độ và dòng điện của động cơ một chiều.
2. Thiết kế khâu điều chỉnh dòng phần ứng theo phương pháp bù sao
cho tín hiệu ra bám tín hiệu đặt sau 3 chu kì trích mẫu với x1=0,5
Hàm truyền của đối tượng :
Với Tt = 0,001s
1
1
1
Tt s + 1 Ra Ta s + 1
Gi ( s ) =
Thay số ta được:
1
0.0000042s + 0, 00473s + 0,55
Gi ( s) =
2
Chuyển hàm truyền liên tục sang gián đoạn với chu kì T = 0,0003 s:
0.009594 z + 0.008572
z 2 − 1.703z + 0.7133
Gs ( z ) =
Chia cả tử và mẫu cho
z
2
ta được:
0.009594 z -1 - 0.008572z -2
1 - 1.703z -1 + 0.7133z -2
Gs ( z ) =
Gw ( z ) =
X ( z)
=
W( z )
( x1.z −1 + (1 − x1 ).z −2 )
1
1 − z −1
1
1 − z −1
= x1.z-1 + (1-x1).z-2
= 0,5.z-1 + 0,5.z-2
⇒ GR =
G ( z)
1
. w
Gs ( z ) 1 − Gw ( z )
=
1 - 1,703z -1 + 0,7133z -2
0,5z −1 + 0,5z −2
.
0,009594 z -1 - 0,008572z -2 1 − 0,5z −1 − 0,5z −2
0,5z −1 − 0,35z −2 − 0, 49z −3 + 0,36z −4
=
0, 009594z −1 − 0, 0135z −2 − 0, 0005z −3 + 0, 0043z −4
3, Thiết kế khâu điều chỉnh tốc độ quay theo phương pháp tiêu chuẩn tích
phân với Tw= 0,015s
0, 0027
0, 000093s + 0, 0122s + 0, 0258
2
Ta có G(s) =
Hàm truyền của bộ biến đổi công suất là:
Gbd ( s) =
0, 0092
1 + 3,333−5 s
⇒ Gs ( z ) =
0, 000025
0, 00000023s + 0, 000122s 2 + 0, 012263s + 0, 0258
3
Chuyển hàm truyền liên tục sang gián đoạn với chu kì T = 0,015 s:
1.33e − 005 z 2 + 1.279e − 005 z + 3.107e − 007
Gs ( z ) =
z 3 − 1.11z 2 + 0.1375 z − 0.0003504
Chia cả tử và mẫu cho
z3
ta được:
1.33e − 005 z −1 + 1.279e − 005 z −2 + 3.107e − 007 z −3
Gs ( z) =
1 − 1.11z −1 + 0.1375 z −2 − 0.0003504 z −3
Chọn sẵn p1= -1. Giả sử biên độ umax = 45 ta có r0 = 45
Với b1 = 0.00896 và điều kiện:
r1 ≤ −r0 (1 − r0 b1 )
thay số ta được:
r1 ≤ −26,86
N
I Q = ∑ ek2
Giả sử ta chọn:
Gs ( z ) =
Với :
k =0
1.33e − 005 z −1 + 1.279e − 005 z −2 + 3.107e − 007 z −3
1 − 1.11z −1 + 0.1375 z −2 − 0.0003504 z −3
G (r ) =
;
r0 + r1 z −1
1 - z -1
Ta tính được sai lệch :
E ( z) = W ( z) =
1
r0 + r1 z 1.33e − 005 z + 1.279e − 005 z −2 + 3.107e − 007 z −3
1 +
.
1-z -1
1 − 1.11z −1 + 0.1375 z −2 − 0.0003504 z −3
−1
−1
Viết sai lệch điều chỉnh dưới dạng sai phân :
e k = wk + ( a1 − 1) wk −1 + (a2 − a1 ) wk − 2 − (a2 + a3 ) wk −3 + a3 wk − 4 − (a1 − 1 + r0b1 )ek −1 − (a 2 -a1 + r0 b 2 + r1b1 )e k-2 −
(r1b2 + a3 + a2 + r0b3 )ek −3 − (a3 + r1b3 )ek − 4
Cho trước wk = 1k thay ek vào IQ tính thử với N = 3
e0 = 1
e1 = (1 − b1.r0 ) = 0,597
e2 = −e1.(a1 − 1 + r0b1 ) − (a1 + r0b2 + r1b1) = 1, 74 + 0, 00896r1
Ta tìm:
2
I Q = ∑ ek2 = e02 + e12 + e22 = 1 + 0, 597 2 + (1, 74 + 0, 00896 r1 ) 2 = 8, 03.10 −5 r12 + 0, 03r1 + 4,38
k =0
Phương trình bậc 2 của r1có điểm cực tiểu tại điểm
Bộ điều khiển có dạng:
45 − 187 z −1
GR =
1 − z −1
r1 ≈ −187
chọn
r1 = −187