Điều khiển từ xa dùng sóng RF cho cầu trục phòng thực hành thí nghiệm tự động hóa trường ĐHCNTTTT
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.5 MB, 67 trang )
LỜI CẢM ƠN
Trên thực tế không có sự thành công nào mà không gắn liền với những sự
hỗ trợ, giúp đỡ dù ít hay nhiều, dù trực tiếp hay gián tiếp của người khác. Trong
suốt thời gian từ khi bắt đầu học tập ở giảng đường đại học đến nay, em đã nhận
được rất nhiều sự quan tâm, giúp đỡ của quý Thầy Cô, gia đình và bạn bè.
Với lòng biết ơn sâu sắc nhất, em xin gửi đến quý Thầy Cô ở khoa Công
nghệ kỹ thuật điều khiển tự động hóa - Đại học Công nghệ thông tin và truyền
thông – Đại học Thái Nguyên. Năm năm em là sinh viên học tập tại trường đã
được Thầy Cô cùng với tri thức và tâm huyết của mình để truyền đạt vốn kiến thức
quý báu cho chúng em, để chúng em có thể hoàn thành đồ án tốt nghiệp.
Trong thời gian làm đồ án tốt nghiệp, em đã nhận được nhiều sự giúp đỡ,
đóng góp ý kiến và chỉ bảo nhiệt tình của thầy cô, gia đình và bạn bè.
Em xin gửi lời cảm ơn chân thành đến thầy Th.s Lê Văn Chung, giảng viên
Bộ môn Công nghệ và thiết bị tự động khoa Công nghệ kỹ thuật điều khiển tự
động hóa - Đại học Công nghệ thông tin và truyền thông - Đại học Thái Nguyên
người đã tận tình hướng dẫn, chỉ bảo em trong suốt quá trình làm đồ án.
Cuối cùng, em xin chân thành cảm ơn gia đình và bạn bè, đã luôn tạo điều
kiện, quan tâm, giúp đỡ, động viên em trong suốt quá trình học tập và hoàn thành
đồ án tốt nghiệp.
Thái Nguyên, ngày … tháng …. năm 2016
Sinh viên
Nguyễn Thành Công
1
2
LỜI CAM ĐOAN
Em cam đoan các kết quả nghiên cứu đưa ra trong đồ án này dựa trên các
kết quả thu được trong quá trình nghiên cứu của riêng em, không sao chép bất kỳ
kết quả nghiên cứu nào của các tác giả khác. Nội dung của đồ án có tham khảo và
sử dụng một số thông tin, tài liệu từ các nguồn sách, tạp chí được liệt kê trong
danh mục các tài liệu tham khảo.
Nguyễn Thành Công
3
MỤC LỤC
LỜI CẢM ƠN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
LỜI CAM ĐOAN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
DANH MỤC HÌNH ẢNH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
LỜI NÓI ĐẦU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
TỔNG QUAN ĐỀ TÀI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
CHƯƠNG 1. CƠ SỞ LÝ THUYẾT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1 Hệ thống cầu trục. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.1 Giới thiệu về cầu trục . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.2 Phân loại cầu trục. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.3 Điều kiện an toàn của máy trục . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2. Sóng RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.1 Điều khiển từ xa bằng tần số vô tuyến (RF) . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.2 Hoạt động . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.3 Ưu Điểm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.4 Phân loại tần số sóng RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.5 Khuyết Điểm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.6 Khắc phục . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.2.7 Ứng dụng sóng RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3 Bộ điều khiển từ xa dùng sóng RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.1 IC PT2262 và PT2272 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.2 Relay YL E(yl303h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.3.3 Tụ điện . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.3.4 Điện trở . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.3.5 Diode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.3.6 Led Đơn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.2.7 Tranzitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4
CHƯƠNG 2. THIẾT KẾ BỘ ĐIỀU KHIỂN DÙNG SÓNG RF VÀ HỆ THỐNG
CẦU TRỤC ĐIỀU KHIỂN TỪ XA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.1 Hệ thống cầu trục điểu khiển từ xa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.1.1 Sơ đồ nguyên lý hoạt động của hệ thống cầu trục. . . . . . . . . . . . . . . . . . . . 41
2.1.2 Sơ đồ trạng thái của hệ thống cầu trục. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.1.3 Thiết kế Các nút bấm cầm tay bộ điều khiển RF. . . . . . . . . . . . . . . . . . . . . 43
2.1.4 Lưu đồ thuật toán điều khiển hệ thống cầu trục. . . . . . . . . . . . . . . . . . . . . . 43
2.2 Thiết kế mạch phần cứng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.2.1 Mạch phát thu có IC giải mã. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.2.2 Thiết lập 2 bộ modul thu/phát RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
CHƯƠNG 3: XÂY DỰNG MẠCH ĐIỀU KHIỂN TỪ XA DÙNG SÓNG RF VÀ
ĐIỀU KHIỂN HỆ THÔNG CẦU TRỤC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1 Bộ thu – phát RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1.1 Nguyên lý hoạt động. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2 Lưu đồ giải thuật. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3 Mạch nguyên lý bộ điều khiển từ xa dùng sóng RF . . . . . . . . . . . . . . . . . . . . . . 52
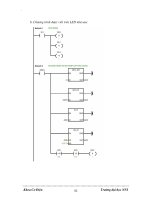
3.3.1 Bo mạch điều khiển từ xa dùng sóng RF với 8 relay chuyển mạch . . . 55
3.4 Mạch điều khiển từ dùng sóng RF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
KẾT LUẬN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
TÀI LIỆU THAM KHẢO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5
DANH MỤC HÌNH ẢNH
Hình 1.1 Cầu trục một dầm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Hình 1.2 Cầu trục 2 dầm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Hình 1.3 Cầu trục tựa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Hình 1.4 Cầu trục treo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Hình 1.5 Cầu trục dẫn động chung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Hình 1.6 Cầu trục dẫn động riêng . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Hình 1.7 Cầu trục dẫn động bằng tay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Hình 1.8 Các loại máy nâng hạ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Hình 1.9: Phân loại tần số sóng RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Hình 1.10 Sơ đồ chân PT 2262 và PT 2272. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Hình 1.11 Sơ đồ khối chức năng 2272 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Hình 1.12 Cách tạo xung nhịp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Hinh 1.13 Khối mạch phát . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Hình 1.14 Khối mạch nhận . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Hình 1.15 Cách tạo xung của cặp IC PT2262/2272 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Hình 1.16 Xung đồng bộ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Hình 1.17 Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Hình 1.18 Cuộn hút của relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Hình 1.19 Tụ điện. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Hình 1.20 Điện trở . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Hình 1.21 Đọc giá trị điện trở 4 vòng. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Hình 1.22 Điện trở 5 vòng màu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Hình 1.23 Diode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Hình 1.24 Tranzitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Hình 2.1 Nguyên lý cầu trục. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Hình 2.2 Sơ đồ trạng thái hệ thống cầu trục. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6
Hình 2.3 Thuật toán điều khiển hệ thống cầu trục từ xa dùng sóng RF . . . . . . . . . 43
Hình 2.4 Module thu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Hình 2.5 Module phát . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Hình 2.6 Sơ đồ mạch phát dùng IC PT 2262 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Hình 2.7 Sơ đồ mạch thu dùng IC PT 2272 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Hình 2.8 bảng tra tần số. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Hình 2.9 Bảng kết nối bit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Hình 2.10 Đặt bit bộ thu/nhận sóng RF 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Hinh 2.11 Đặt bit bộ thu/nhận sóng RF 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Hình 3.1 Bộ phát RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Hình 3.2 Bộ Thu RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Hình 3.3 Lưu đồ mạch thu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Hình 3.4 Lưu đồ mạch phát . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Hình 3.5 Mạch thu sóng RF sử dụng PT2272 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Hình 3.6 Mạch phát sóng RF 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Hình 3.7 Mạch phát sóng RF 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Hình 3.8 Sơ đồ mạch nguyên lý điều khiển xa dùng sóng RF. . . . . . . . . . . . . . . . . . 54
Hình 3.9 Bo mạch điều khiển từ xa dùng sóng RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Hình 3.10 Bộ thu/phát RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Hình 3.11 Mạch điều khiển từ xa dùng sóng RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7
LỜI NÓI ĐẦU
Truyền dữ liệu không dây là một mảng lớn trong điện tử thông tin, dữ liệu
được truyền đi có thể là tương tự cũng có thể là số. Trong truyền dữ liệu không
dây, hiệu quả nhất vẫn là truyền bằng sóng điện từ hay sóng Radio, bởi những ưu
điểm là truyền ở khoảng cách xa, đa hướng, tần số hoạt động cao.
Vì vậy em chọn đồ án tốt nghiệp là:
“Điều khiển từ xa dùng sóng RF cho cầu trục phòng thực hành thí nghiệm tự
động hóa trường ĐHCNTT&TT”
Đồ án tốt nghiệp của em gồm 3 chương:
Chương 1: Cơ Sở lý thuyết
Chương 2: Bộ điều khiển dùng sóng RF và hệ thống cầu trục điều khiển từ
xa.
Chương 3: Xây dựng mạch điều khiển từ xa dùng sóng RF và điều khiển hệ
thống cầu trục
Bằng sự cố gắng nỗ lực của bản thân và đặc biệt là sự giúp của thầy giáo
ThS.Lê Văn Chung, các thầy cô trong khoa Công nghệ kỹ thuật điều khiển tự động
hóa, cùng với em đã hoàn thành đồ án đúng thời hạn. Do thời gian làm đồ án có
hạn và trình độ còn nhiều hạn chế nên không thể tránh khỏi những thiếu sót. Em
rất mong nhận được sự đóng góp ý kiến của các thầy cô cũng như là của các bạn
sinh viên để bài đồ án này hoàn thiện hơn nữa. Em xin chân thành cảm ơn thầy
giáo Ths. Lê Văn Chung, các thầy cô giáo trong khoa Công nghệ kỹ thuật điều
khiển tự động hóa trường Đại học Công nghệ thông tin và truyền thông tỉnh Thái
Nguyên đã tạo điều kiện giúp đỡ em trong thời gian qua.
Thái Nguyên, ngày … tháng …. năm 2016
Sinh viên
Nguyễn Thành Công
8
9
TỔNG QUAN ĐỀ TÀI
1. Mục đích
Bằng các kiến thức đã học và tự tìm hiểu nghiên cứu, vận dụng chúng để
xây dựng mạch điều khiển từ xa dùng sóng RF. Qua đó giúp em rèn luyện và hiểu
thêm về thiết kế, xây dựng cũng như ứng dụng của thiết bị điều khiển từ xa vào
trong thực tế.
Điều khiển từ xa dùng sóng RF để điều khiển hệ thống cầu trục dễ dàng
hơn.
2. Nhiệm vụ
Tìm hiểu hệ thống cầu trục trên phòng thực hành thí nghiệm trường Đại
Học CNTT&TT.
Nghiên cứu được nguyên lý và thiết kế bộ điều khiển từ xa bằng sóng RF.
Xây dựng mạch điều khiển từ xa dùng sóng RF điều khiển hệ thống cầu trục
đảm bảo đơn giản, dễ dàng, hiệu quả.
3. Nội dung:
Ứng dụng được module thu phát RF điều khiển cho hệ thống cầu trục
phòng thực hành thí nghiệm trường ĐHCNTT&TT. Với 8 đầu ra relay điều khiển
hệ thống cầu trục.
Thiết kế và thi công mạch chạy thành công.
4. Phương pháp nghiên cứu:
Phương pháp nghiên cứu được áp dụng cho các khâu phân tích, thiết kế, là
thống nhất theo phương pháp vừa làm vừa nghiên cứu.
Dùng phương pháp đọc tài liệu kết hợp với so sánh để tìm hiểu lý thuyết về
các nội dung cần nghiên cứu.
Quá trình phân tích phải càng chi tiết càng tốt để sao cho phần cứng được
tối ưu, dễ dàng cho việc viết chương trình điều khiển.
Việc thiết kế là tổng hòa của các giải pháp để phần mềm của hệ thống được
mềm dẻo, đảm bảo các yêu cầu khi cần thay đổi hệ thống.
10
Đảm bảo tính mở và hướng phát triển cho hệ thống.
5. Dự kiến kết quả đạt được.
Hiểu được nguyên lý hoạt động của hệ thống cầu trục trên phòng thực hành
thí nghiệm trường ĐHCNTT&TT.
Xây dựng mạch điều khiển từ xa dùng sóng RF.
Dùng mạch điều khiển từ xa dùng sóng RF điều khiển thành công hệ thống
cầu trục trên phòng thực hành thí nghiệm trường ĐHCNTT&TT.
11
CHƯƠNG 1. CƠ SỞ LÝ THUYẾT
Hệ thống cầu trục.
1.1.1 Giới thiệu về cầu trục
Máy nâng chuyển là loại máy công tác dùng để thay đổi vị trí của đối tượng
công tác nhờ thiết bị mang vật trực tiêp như móc treo, hoặc thiết bị gian tiếp như
gầu ngoạm, nam châm điện, băng tải. Sự ra đời của nó gắn liền với yêu cầu kinh tế kỹ
thuật của ngành công nghiệp nhằm giảm tối đa sức người trong lao động .
Đặc điểm làm việc của các cơ cấu máy nâng là ngắn hạn, lặp đi lặp lại và có
thời gian dừng. Chuyển động chính của máy là nâng hạ vật theo phương thẳng
đứng, ngoài ra còn một số các chuyển động khác để dịch chuyển vật trong mặt
phẳng ngang như chuyển động quay quanh trục máy, di chuyển máy, chuyển động
lắc quanh trục ngang. Bằng sự phối hợp giữa các chuyển động, máy có thể dịch
chuyển vật đến bất cứ vị trí nào trong không gian làm việc của nó.
Để đáp ứng yêu cầu và đòi hỏi của các ngành công nghiệp khác nhau, kĩ
thuật nâng vận chuyển cũng xuất hiện nhiều loại máy nâng vận chuyển mới, luôn
cải tiến và hợp lí hóa phương pháp phục vụ, nâng cao hơn độ tin cậy làm việc, tự
động hóa các khâu điều khiển, tiện nghi và thỏa mãn yêu cầu của người sử dụng.
Tùy theo kết cấu và công dụng, máy nâng chuyển được chia thành các loại: kích,
bàn tời, palăng, cầu trục, cổng trục, thang nâng.v.v..
Cầu trục là loại máy trục kiểu cầu. Loại này di chuyển trên đường ray đặt
trên cao dọc theo nhà xưởng, xe con mang hàng di chuyển trên kết cấu thép kiểu
cầu, cầu trục có thể nâng hạ và vận chuyển hàng theo yêu cầu tại bất kì điểm nào
trong không gian của nhà xưởng. Cầu trục được sử dụng trong tất cả các lĩnh vực
của nền kinh tế quốc dân với các thiết bị mang vật rất đa dạng như móc treo, thiết
bị cặp, nam châm điện... Đặc biệt cầu trục được sử dụng phổ biến trong ngành
công nghiệp chế tạo máy và luyện kim với các thiết bị mang vật chuyên dùng.
1.1.2 Phân loại cầu trục
a. Theo công dụng
12
Theo công dụng có các loại cầu trục công dụng chung và cầu trục chuyên dung.
Cầu trục có công dụng chung có kết cấu tương tự như các loại cầu trục
khác, điểm khác biệt cơ bản của các loại cầu trục này là thiết bị mang vật đa dạng,
có thể nâng được nhiều loại hàng hóa khác nhau. Thiết bị mang vật chủ yếu của
cầu trục này là móc treo để xếp dỡ, lắp ráp và sữa chữa máy móc, loại cầu này có
tải trọc nâng không lớn và khi cần có thể dung với gầu ngoạm. Nam châm điện
hoặc thiết bị xếp dỡ một loại hàng hóa nhất định.
Cầu trục chuyên dùng là loại cầu trục mà thiết bị mang vật của nó chuyên
để nâng một loại hàng hóa nhất định. Cầu trục chuyên dùng được sử dụng chủ
trong công nghiệp luyện kim với các thiết bị mang vật chuyên dùng và có chế độ
làm việc rất nặng.
b. Theo kết cấu dầm cầu
Theo kết cấu dầm có loại cầu trục một dầm và cầu trục hai dầm
Cầu trục một dầm là loại máy trục kiểu cầu thường có một dầm chạy chữ I
hay tổ hợp với các dàn thép tăng cường cứng cho dầm cầu. Xe con cho palang di
chuyển trên cánh dưới dầm chữ I, hoặc mang cơ cấu nâng di chuyển phía tren dầm
chữ I, toàn bộ cầu trục có thể di chuyển dọc theo nhà xưởng trên đường ray chuyên
dụng ở trên cao. Tất các cầu trục một dầm đều dùng palang đã được chế tạo sẵn
theo tiêu chuẩn để làm cơ cấu nâng hạ hàng. Nếu nó được trang bị palang keo tay
thì gọi là cầu trục một dầm dẫn động bằng tay, nếu được trang bị palang điện thì
gọi là cầu trục một dầm dẫn động bằng điện.
Hình 1.1 Cầu trục một dầm
13
Bộ phận cấp điện lưới 3 pha.
6. Palang điện.
Trục truyền động.
7. Dầm chính.
Cơ cấu chuyển cầu.
8. Khung dàn thép.
Bánh xe di chuyển cầu.
9. Móc sâu
Dầm cuối.
10. Cabin điều khiển.
Cầu trục một dầm dẫn động bằng tay có kết cấu đơn giản và rẻ tiền nhất,
chúng được sử dụng trong công nghiệp sữa chữa, lắp đặt thiết bị với khối lượng
công việc ít, sức nâng của cầu trục loại này thường khoảng từ 0,5-5 tấn, tốc độ làm
việc chậm.
Cầu trục một dầm dẫn động bằng điện được trang bị palang điện nên sức
nâng có thể lên 10 tấn , khẩu độ đến 30 m, gồm có bộ phận cấp điện lưới 3 pha.
Cầu trục hai dầm:
Kết cấu tổng thể của cầu trục hai dầm gồm có: dầm hoặc dàn chủ, hai dầm
chủ liên kết với hai dầm đầu, trên dầm đầu lắp các bánh xe di chuyển cầu trục 6,
bộ máy dẫn động, bộ máy di chuyển hoạy động sẽ làm cho các bánh xe quay và
cầu trục chuyển động theo đường ray chuyên dùng đặt trên cao dọc theo nhà
xưởng, hướng chuyển động của cầu trục, chiều quay của động cơ điện.
Xe con mang hàng di chuyển dọc trên đường ray lắp trên hai dầm chủ, trên
xe con đặt các bộ phận máy của tời chính 10, tời phụ 9 và máy di chuyển xe con 2,
các dây cáp điện 8 có thể co dãn phụ hợp với trí của xe con, và cấp điện cho cầu
trục nhờ hệ thanh dẫn điện 12 đặt dọc theo tường nhà xưởng, các quẹt điện ba pha
tùy sát trên các thanh này, lồng thép 13 làm công tác kiểm tra theo dưới dầm cầu
trục .Các bộ phận của cầu trục thực hiện ba chức năng: nâng hạ hàng di chuyển xe
con và di chuyển cầu trục. Sức nâng của cầu trục hai dầm trong khoảng từ 5–30
tấn, khi có yêu cầu riêng có thể lên đên 500 tấn. Ở cầu trục có sức nâng trên 10 tấn,
thường được trang bị hai tời nâng cùng vơi hai móc câu chính và phụ, tời phụ
thường có sức nâng bằng một phần tư (0,25) sức nâng của tời chính, nhưng tốc độ
nâng thì lớn hơn.
14
Hình 1.2 Cầu trục 2 dầm
Dầm chính của cầu trục hai dầm được chế tạo dạng hộp hoặc giàn không
gian. Dầm giàn không gian tuy nhẹ hơn dầm hộp nhưng khó chế tạo và dùng cho cầu
làm dưới dạng hộp và được liên kết với các dầm chính bằng mối hàn hoặc bu lông.
c. Theo cách tựa của dầm chính
Theo cách tựa của dàm chính thì có loại cầu trục tựa và cầu trục treo
15
Hình 1.3 Cầu trục tựa
Cầu trục cầu là loại cầu trục có hai đầu của dầm chính rựa lên dầm cuối
,chúng được liên kết với nhau bởi đinh tán hoặc hàn, loại cầu trục này có kêta cấu
đơn giản nhưng vẫn đảm bảo được độ tin cậy cao nên cũng được dùng phổ biến.
Trên hình 1.6 là hình chung của cầu trục tụa loại 1 dầm phần kết cấu gồm dầm cầu
1 có hai đầu tựa lên các dầm cuối 5 với các bánh xe di chuyển dọc theo nhà xưởng.
Loại cầu trục này thường dùng phương án dẫn động chung, phía trên dầm chữ I là
khung thép 4 để đảm bảo độ cứng vững theo phương ngang của dầm cầu. Palăng
điện 3 có thể chạy dọc theo cánh thep phía dưới của dầm I nhờ cơ cấu di chuyển
palăng. Cabin điều khiển được treo vào kết cấu chịu lực của cầu trục.
Cầu trục treo là loại cầu trục mà toàn bộ phần kết cấu có thể chạy dọc theo
nhà xưởng nhờ hai ray treo hoặc nhiều ray treo. Do liên kết treo của các ray phức
tạp nên loại cầu trục này chỉ được dùng trong các trường hợp đặc biệt cần thiết so
với cầu trục tựa cầu trục treo có ưu điểm là có thể làm dầm cầu dài hơn, do đó có
thể phục vụ cả phần rìa mép của nhà xưởng thậm chí có thể chuyển hàng giữa hai
nhà xưởng song song đồng thời kết cấu của cầu trục treo nhẹ hơn cầu trục tựa. Tuy
nhiên cầu trục treo có chiều cao nâng thấp hơn cầu trục tựa.
Cầu trục treo có 2 loại: Loại 2 dây treo và 3 dây treo.
16
Hình 1.4 Cầu trục treo
a) Loại 2 dây treo. b) Loại 3 dây treo.
d. Theo cách bố trí cơ cấu cơ. cấu di chuyển cầu trục
Cầu trục dẫn động chung
Cầu trục dẫn động riêng.
Cơ cấu di chuyển của cầu trục có thể thực hiện theo 2 phương án dẫn động
chung và dẫn động riêng. Trong phương án dẫn động chung, động cơ động được
đặt ở giữa dầm cầu và truyền chuyển động đén các bánh xe chủ động ở hai bên ray
nhờ các trục truyền. Các trục truyền có thể là trục quay nhanh quay chậm, quay
trung bình.
17
Hình 1.5 Cầu trục dẫn động chung
Hình 1.6 Cầu trục dẫn động riêng
Cơ cấu di chuyển dẫn động riêng hình 1.6 gồm hai cơ cấu như nhau dẫn
động cho các bánh xe chủ động ở mỗi bên ray đặc biệt. Công suất của mỗi động cơ
thường lấy bằng 60% tổng công suất của yêu cầu. Phương án này tuy có sự xô lệnh
dầm cầu khi di chuyển do lực cản ở hay bên ray không đều song do nhỏ gọn, dễ lắp
đặt sử dụng và bảo dưỡng mà ngày càng được sử dụng phổ biến hơn, đặc biệt là
những cầu trục có khẩu độ trên 15 m.
e. Theo nguồn dẫn động
Cầu trục dẫn động bằng tay và cầu trục dẫn động bằng máy
18
Cầu trục dẫn động bằng tay: Được dùng chủ yếu trong lắp ráp sữa chữa nhỏ
và các công việc nân chuyển không cần tốc độ cao. Cơ cấu nâng của loại cầu trục
nầy thường là palăng kéo tay. Cơ cấu di chuyển palang xích và cầu trục cũng được
dẫn động bằng cách kéo xích từ dưới lên. Tuy là thiết bị thô sơ song giá thành rẻ
và dễ sử dụng nên cầu trục dẫn động bằng tay vẫn được sử dụng hiệu quả trong các
phân xưởng nhỏ.
Hình 1.7 Cầu trục dẫn động bằng tay
a) Loại 1 dầm.
b) loại 2 dầm.
Cầu trục dẫn động bằng động cỏ: Thường được sử dụng trong các phân
xưởng sữa chữa lắp ráp lớn và công việc yêu cầu khối lượng và tốc độ làm việc
cao. Cơ cấu nâng của loại cầu trục này là palăng điện. Cơ cấu di chuyển palang
điện, xe con và cầu cũng được dẫn động bằng động cơ điện. Loại cầu trục này
được sử dụng phổ biến nhất do có nhiều ưu điểm nổi bậc là khả năng tự động hóa,
thuận tiện cho người sử dụng và có thể sử dụng trong việc vận chuyển các loại
hàng có khối lượng lớn.
f. Theo vị trí điều khiển
Theo vị trí điều khiển có các loại điền khiển từ cabin gắn trên dầm cầu và
cầu trục điều khiển từ dưới nền nhờ nút bấm. Điều khiển từ dưới nền bằng hộp nút
bấm thường dùng cho các loại cầu trục 1 dầm có tải trọng nâng nhỏ.
19
Hình 1.8 Các loại máy nâng hạ.
1.1.3 Điều kiện an toàn của máy trục
Trong thực tế tần suất xảy ra tay nạn trong sử dụng máy nâng là lớn hơn rất
nhiều so với các loại máy khác. Do vậy vấn đề an toàn trong sử dụng máy nâng là
vấn đề quan trọng được đặt lên hàng đầu.
20
Với cầu trục lăn do có nhiều bộ phận máy lắp với nhau và được đặt trên cao
do vậy cần phải thường xuyên kiểm tra để kịp thời phát hiện những hư hỏng như
lỏng các mối ghép, rạn nứt tại các mối hàn do thời gian sử dụng lâu…..
Đối với các chi tiết máy chuyển động như bánh xe, trục quay phải có vỏ bọc
an toàn nhằm ngăn những mảnh vỡ văng ra nếu có sự cố khi chi tiết máy hoạt động
Toàn bộ hệ thống điện trong máy phải được nối đất. Với các động cơ đều có
phanh hãm tuy nhiên phải kiểm tra phanh thường xuyên không để xảy ra hiện
tượng kẹt phanh gây nguy hiểm khi sử dụng.
Tất cả những người điều khiển máy làm việc hay phục vụ máy trong phạm
vi làm việc của máy đều phải học tập các quy định về an toàn lao động có làm bài
kiểm tra và phải đạt kết quả.
Trong khi máy làm việc công nhân không được đứng trên vật nâng hoặc bộ
phận mang để di chuyển cùng với vật cùng như không được dùng dưới vật nâng
đang di chuyển.
Đối với máy không không hoạt động thường xuyên (nhiều ngày không sử
dụng) khi đưa vào sử dụng phải kiểm tra toàn bộ kết cấu máy. Để kiểm tra tiến
hành thử máy với hai bước là thử tĩnh và thử động.
Bước thử tĩnh: treo vật nâng có trọng lượng bằng 1,25 lần trọng lượng nâng
danh nghĩa của cầu trục thiết kế và để trong thời gian từ 10 đến 20 phút.
Theo dõi biến dạng của toàn bộ các cơ cấu máy. Nếu không có sự cố gì xảy
ra thì tiếp tục tiến hành thử động.
Bước thử động: Treo vật nâng có trọng lượng bằng 1,1 trọng lượng nâng
danh nghĩa sau đó tiến hành mở máy nâng, di chuyển, hạ vật, mở máy đột ngột,
phanh đột ngột. Nếu không có sự cố xảy ra thì đưa máy vào hoạt động.
Trong công tác an toàn sử dụng cầu trục người quản lý có thể cho lắp thêm
các thiết bị an toàn nhằm hạn chế tối đa tai nạn xảy ra cho công nhân khi làm việc.
Một số thiết bị an toàn có thể sử dụng đó là: Sử dụng các công tắc đặt trên
những vị trí cuối hành trình của xe lăn hay cơ cấu di chuyển cổng trục .Các công
21
tắc này được nối với các thiết bị đèn hoặc âm thanh báo hiệu nhằm báo cho người
sử dụng biết để dừng máy. Đồng thời cũng có thể nối trực tiếp với hệ thống điều
khiển để tự động ngắt thiết bị khi có sự cố xảy ra.
Như vậy để hạn chế tối đa tai nạn xảy ra đòi hỏi người công nhân sử dụng
máy phải có ý thức chấp hành nghiêm túc những yêu cầu đã nêu trên.
1.2. Sóng RF
1.2.1 Điều khiển từ xa bằng tần số vô tuyến (RF)
Sóng vô tuyến (RF) là một dạng dao động sóng, không nhìn thấy được và
được lan tỏa theo mọi hướng.
Là loại điều khiển từ xa xuất hiện đầu tiên và đến nay vẫn giữ một vai trò
quan trọng và phổ biến trong đời sống. Nếu điều khiển IR chỉ dùng trong nhà thì
điều khiển RF lại dùng cho nhiều vật dụng bên ngoài như các thiết bị mở cửa gara
xe, hệ thống báo hiệu cho xem các loại đồ chơi điện tử từ xa thậm chí kiểm soát vệ
tinh và các hệ thống máy tính xách tay và điện thoại thông minh…
1.2.2 Hoạt động
Với loại điều khiển này, nó cũng sử dụng nguyên lý tương tự như điều
khiển bằng tia hồng ngoại nhưng thay vì gửi đi các tín hiệu ánh sáng, nó lại truyền
sóng vô tuyến tương ứng với các lệnh nhị phân. Bộ phận thu sóng vô tuyến trên
thiết bị được điều khiển nhận tín hiệu và giải mã nó.
RF thường được xem là dao động điện chứ không phải là dao động cơ khí,
dù các hệ thống RF cơ khí vẫn tồn tại
Các dòng điện dao động ở các tần số vô tuyến có các tính chất đặc biệt khác
với dòng một chiều hay dòng xoay chiều dao động ở tần số thấp. Năng lượng trong
một dòng điện RF có thể lan truyền trong không gian như các sóng điện từ (sóng
vô tuyến); đây là cơ sở của công nghệ vô tuyến. Dòng điện RF không chạy trong
lòng dây dẫn mà phần lớn lại chạy trên bề mặt của dây dẫn; điều này được gọi
là hiệu ứng bề mặt. Vì lý do này, khi cơ thể con người tiếp xúc với các dòng điện
RF công suất lớn có thể gây bỏng bề mặt da và còn được gọi là bỏng RF.
22
Dòng điện RF có thể dễ dàng ion hóa không khí, tạo ra vùng dẫn điện qua
nó. Đặc tính này được áp dụng cho các khối "cao tần" trong hàn hồ quang điện,
cách hàn này sử dào điện ở tần số cao hơn so với phân bố công suất sử dụng. Đặc
tính khác là khả năng xuất hiện dòng điện qua nơi chứa vật liệu cách điện, như
chất li điện môi của một tụ điện. Khi dẫn điện bằng một dây cáp điện thông
thường, dòng điện RF có xu hướng phản xạ không liên tục trong cáp chẳng hạn
như trong các bộ đấu nối và phản xạ ngược trở lại nguồn, gây ra sóng đứng, do đó
dòng điện RF phải được truyền trên một loại cáp đặc biệt gọi là đường dây truyền
tải.
Khi sử dụng module phát sóng thì mọi dữ liệu của bạn sẽ được chuyển
thành tín hiệu điện và sẽ được gửi đi trong không trung thông qua ănten.
Sóng vô tuyến được truyền vào không trung, và càng đi xa nó càng rộng, vì
vậy nó sẽ càng yếu đi. Để thu được sóng vô tuyến, bạn cần phải có một mạch thu
sóng. Ănten của mạch thu sẽ dựa vào những dao động của sóng vô tuyến để tạo
thành tín hiệu điện mà điện tử có thể hiểu được rồi từ đó dịch mã ra các giá
trị.
Sóng có nhiều đại lượng đặc trưng cơ bản, đó là tần số. Tần số nghĩa là số
lần dao động trong 1 giây. Đại lượng này đặc trưng duy nhất cho mỗi mạch
thu/phát sóng, nghĩa là mỗi mạch chỉ có thể truyền phát lẫn nhau khi nó cũng tần
số. Ví dụ như xe điều khiển từ xa có tần số mạch phát = tần số mạch thu = 27MHz.
Tần số trong truyền sóng thường rất lớn (từ 27Mhz - 5GHz) nên có rất nhiều tần
số thoải mái cho bạn lựa chọn. Quay lại trọng tâm câu hỏi, nếu bạn sử dụng
nhiều mạch phát và nhiều mạch thu thì có thể xảy ra 1 trong 2 trường hợp
sau:
Nhiều mạch thu/phát khác tần số:
Khi mạch thu đúng tần số của mạch phát thì mới truyền tin được. Nếu bạn
có nhiều cặp thu phát vơi tần số khác nhau thì chẳng bao giờ bạn truyền tin
sai lệch.
23
Nhiều mạch thu/phát cùng tần số:
Lúc này thì lại có 2 vấn đề con nảy sinh, để khắc phục ta làm như sau.
Vấn đề 1: Nếu gửi tín hiệu cho mạch A và mạch B cùng tần số, nhưng lúc
thì mạch A, lúc thì mạch B ta chưa xác định được lỗi. Trong truyền sóng, bạn có
thể phát từ một module phát đến nhiều mạch thu. Thông thường, các module phát
sẽ được kết nối với Arduino thông qua một thư viện, còn các module thu có thể
dùng mạch thu có IC (không cần dùng Arduino, tự hoạt động độc lập), hoặc dùng
mạch thu không IC (phải dùng thông qua thư viện của Arduino). Với loại thu có IC
thì bạn có thể làm điều tôi vừa nói nhưng hơi phức tạp một tí, tôi sẽ nói ở bài sau,
còn với loại thu không IC bạn sẽ sử dụng thư viện của Arduino với cấu trúc rẻ
nhán để thực hiện các lệnh. Ví dụ: tôi sẽ gửi một dữ liệu là một số nguyên
kiểu byte và...
Mạch thu A sẽ làm đèn LED 13 của Arduino sáng nếu nó nhận giá trị
<=100, ngược lại là tắt
Mạch thu B sẽ làm đèn LED 13 của Arduino sáng nếu nó nhận giá trị >
100, ngược lại là tắt.
Như vậy, nếu tôi gửi giá trị 69 từ mạch thu thì đèn LED 13 của mạch A
sẽ sáng còn mạch B sẽ tắt. Còn nếu tôi gửi giá trị 169 thì mạch A tắt còn mạch B
tắt,...
Vấn đề 2: Nếu gửi từ 2 mạch phát đến 1 mạch thu thì không thể gửi được,
vì lúc này, nó sẽ gây ra hiện tượng nhiễu, chẳng hạn mạch phát A gửi dữ liệu là 69
còn mạch phát B gửi dữ liệu là 169, như vậy mạch thu hoặc sẽ nhận được 69 hoặc
sẽ nhận được 169 => nhiễu. Vì vậy, cần phải canh thời gian sao cho khi mạch A
gửi, bản mạch B không gửi và ngược lại, nghĩa là chúng ta phải gửi tuần tự, không
được gửi cùng một lúc.
Kết luận:
Để truyền phát thông tin qua sóng vô tuyến chúng ta cần 2 module: 1 là thu,
và 2 là phát. Tuỳ thuộc vào ứng dụng của ta mà ta lựa chọn tần số cho phù hợp.
24
Những module có tần số cao thường truyền rất xa nhưng không "xuyên tường"
được, trong khi đó các loại có tần số thấp hơn thì lại xuyên tường tốt.
1.2.3 Ưu Điểm
Tần số vô tuyến (RF) là dải tần số nằm trong khoảng 3 kHz tới 300 GHz,
tương ứng với tần số của các sóng vô tuyến và các dòng điện xoay chiều mang tín
hiệu vô tuyến.
Truyền xa hơn IR với khoảng cách khoảng 30m hoặc có thể lên tới
100m.
Truyền xuyên tường, kín, có thể truyền mọi loại dữ liệu, từ số, chữ cho đến
hình ảnh, âm thanh, video.
1.2.4 Phân loại tần số sóng RF
Hình 1.9: Phân loại tần số sóng RF
1.2.5 Khuyết Điểm
Bị nhiễu sóng do bên ngoài có rất nhiều các thiết bị máy móc sử dụng các
tần số khác nhau.
1.2.6 Khắc phục
25