BÁO CÁO VI ĐIỀU KHIỂN PIC 16F84A
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (382.63 KB, 18 trang )
TRƯỜNG ĐẠI HỌC MỎ - ĐỊA CHẤT
BỘ MÔN TỰ ĐỘNG HÓA XÍ NGHIỆP MỎ - DẦU KHÍ
ĐỒ ÁN MÔN HỌC
KỸ THUẬT VI ĐIỀU KHIỂN
Đề tài :
NGHIÊN CỨU VỀ VI ĐIỀU KHIỂN PIC VÀ ỨNG DỤNG TRONG
ĐIỀU KHIỂN LED 7 THANH
Giáo viên hướng dẫn:
Nhóm sinh viên thực hiện
Ths. Nguyễn Thế Lực
Hà Nội, 2017
Lời mở đầu
Ngày nay, khái niệm kỹ thuật số đã trở thành quen thuộc với nhiều người, bởi vì
sự phát triển của ngành kỹ thuật số này đã có ảnh hưởng rất lớn đến ngành kinh tế toàn
cầu. Có người đã nêu lên ý tưởng gọi nền kinh tế của thời đại chúng ta là “ nền kinh tế kỹ
thuật số “, “số hóa” đã gần như vượt khỏi ranh giới của một thuật ngữ kỹ thuật . Nhờ có
ưu điểm của xử lý số như độ tin cậy trong truyền dẫn, tính đa thích nghi và kinh tế của
nhiều phần mềm khác nhau, tính tiện lợi trong điều khiển và khai thác mạng.
Số hóa đang là xu hướng phát triển tất yếu của nhiều lĩnh vực kỹ thuật và kinh
tế khác nhau. Không chỉ trong lĩnh vực thông tin liên lạc và tin học. Ngày nay, kỹ thật số
đã và đang thâm nhập mạnh mẽ vào Kỹ thuật điện tử, Điều khiển tự động, phát thanh
truyền hình, y tế, nông nghiệp…và ngay cả trong các dụng cụ sinh hoạt gia đình.
Ngay từ những ngày đầu khai sinh, kỹ thuật số nói riêng và ngành điện tử nói
chung đã tạo ra nhiều bước đột phá mới mẽ cho các ngàng kinh tế khác và còn đảm bảo
được yêu cầu của người dùng cả về chất lượng và dịch vụ. Đồng thời kiến thức về kỹ
thuật số là không thể thiếu đối với mỗi sinh viên, nhất là sinh viên điện tử.
Và như mọi người nhận thấy rằng, ngày nay trật tự giao thông nước ta đang rối
ren. Vì vậy việc sử dụng đèn giao thông tại những giao lộ là rất cần thiết và để hiểu rõ
hơn về nguyên lý hoạt động và muốn phát triển thêm về mô hình này, em đã chọn đề tài
cho báo cáo chuyên nghành là: “Nghiên cứu về vi điều khiển PIC và ứng dụng trong
điều khiển led 7 thanh” .
Trong quá trình thực hiện đồ án môn học, với sự giúp đỡ tận tình của Th.S Nguyễn
Thế Lực và các bạn trong lớp, nhóm chúng em cố gắng thiết kế sao cho mô hình hoạt
động là hoàn thiện nhất, ổn định nhất. Tuy nhiên do kiến thức còn hạn chế và kinh
nghiệm làm việc không được nhiều nên sản phẩm làm ra còn gặp nhiều thiếu sót mong
được sự thông cảm của quý thầy cô. Chúng em chân thành cảm ơn.
Chương 1. NGUYÊN LÝ LÀM VIỆC CỦA MÔ HÌNH
Hình 1.1 Mô hình điều khiển led 7 thanh
1.1 Các thiết bị có trong mô hình
Trong mô hình có các nút bấm để điều khiển là start, stop, và led 7 thanh để hiển thị.
Ngoài ra còn có các chấu để nhận tín hiệu từ ngoài vào và xuất tín hiệu ra ngoài mô hình.
1.2 Nguyên lý hoạt động của led 7 thanh
1.3 Ý tưởng thiết kế hệ thống điều khiển đèn giao thông
Chương 2. THIẾT KẾ MẠCH ĐIỀU KHIỂN CHO MÔ HÌNH
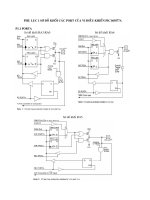
2.1 Sơ đồ khối
Sơ đồ khối của hệ thống bao gồm các khối sau: Khối đầu vào, Khối nguồn, Khối điều
khiển, Khối hiển thị.
Hình 2.1 Sơ đồ khối hệ thống điều khiển của mô hình
2.2 Chức năng của từng khối
• Khối đầu vào: Gồm các công tắc để điều chỉnh các chế độ hoạt động của hệ
thống.
• Khối nguồn: Cung cấp điện áp cho toàn bộ hệ thống và đảm bảo sự ổn định
điện áp.
• Khối điều khiển: Điều khiển mọi sự hoạt động của hệ thống, thực hiện chương
trình, xử lý các điều khiển đầu vào/ra và truyền thông với các thiết bị bên
ngoài.
• Khối hiển thị: Hiển thị hoạt động của các thiết bị thông qua led 7 thanh
2.3 Lựa chọn linh kiện
2.3.1 Danh sách linh kiện cơ bản
STT
1
2
3
4
5
TÊN LINH KIỆN
PIC 16F84A
74HC595
Led 7 thanh catot chung
Đèn led
7805
CHỨC NĂNG CHÍNH
Vi điều khiển, điều khiển hoạt động của mô hình
Ic ghi dịch
Hiển thị thời gian đếm lùi
Hiển thị đèn báo tín hiệu
IC ổn áp
2.3.2 Khối đầu vào
Đầu vào các thiết bị sẽ sử dụng các công tắc để điều khiển hoạt động của các hệ
thống:
Đầu vào các thiết bị sẽ sử dụng các công tắc để điều khiển hoạt động của các hệ
thống:
3.3 Module điều khiển
a, Vi điều khiển PIC16F84A
PIC (Peripheral Interface Controller) là nhóm các IC dùng để chấp hành câu lệnh
điều khiển theo các chương trình đã có trong bộ nhớ. Bộ nhớ và CPU có thể xem như bộ
óc của máy và PIC là các hệ thần kinh dùng để chấp hành các chương trình đã có trong
bộ nhớ.
PIC 16F84 là dòng PIC phổ biến nhất được khuyến khích cho những người mới học.
Đặc tính của PIC 16F84A:
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
Chỉ dùng 35 câu lệnh để viết tất cả các chương trình nguồn cho PIC16Fxx.
Tất cả các câu lệnh chỉ dùng 1 chu kỳ máy, các câu lệnh nhảy dùng 2 chu kỳ máy.
Tốc độ vận hành: Dùng xung nhịp là 4MHz và chu kỳ máy là 1s.
Có bộ nhớ chương trình (Flash Program Memory) 1024 Word (1K x 14).
Bộ nhớ RAM (RAM File Rigister) 68 byte.
Bộ nhớ dữ liệu EEPROM 64 byte.
Độ rộng câu lệnh là 1 Word 14 bit.
Xử lý dữ liệu dạng 8 bit (1 byte).
Có 15 thanh ghi chuyên dụng SFR (Special Function Register) trong RAM.
Dùng ngăn xếp có chiều xâu 8 lớp.
Có mode truy cập theo địa chỉ trực tiếp, gián tiếp và địa chỉ tương đối.
Có 4 dạng ngắt:
o Ngắt ngoài trên tín hiệu trên chân RB0/INT.
o Ngắt theo bit báo tràn của Timer 0.
o Ngắt theo sự thay đổi trên các chân RB4, RB5, RB6, RB7.
o Ngắt khi ghi xong dữ liệu vào bộ nhớ EEPROM.
Có 13 chân dùng xuất nhập dữ liệu (Ở Port A có 5 chân và Port B có 8 chân).
Có khả năng cấp dòng chảy vào/ra đủ lớn: 25mA, đủ cấp cho các Led chiếu sáng.
Có 1 đồng hồ Timer 0 (TMR0), dùng thanh đếm xung 8 bit, nên đếm được tối đa 256
nhịp.
Với bộ nhớ chương trình Flash Program Memory, có thể xóa ghi được 1.000 lần.
Với bộ nhớ EEPROM có thể xóa ghi dữ liệu đến 1.000.000 lần.
Dữ liệu cất giữ trong bộ nhớ EEPROM có thể an toàn tên 40 năm.
Có thể lập trình và nạp ngay trên bo (ICSP, In-Circuit Serial Programming) chỉ dùng
2 chân.
Có chức năng POR (Power On Reset), PWRT (Power-up Timer), OST (Oscillator
Start-up Timer).
Chức năng Watch-dog (WDT) làm việc với mạch dao động RC riêng trong IC.
Có mode bảo vệ mã. (Code Protection).
Có mode Sleep dùng tiết kiệm điện năng khi ở trạng thái chờ.
Có nhiều tùy chọn cho mạch dao động tạo xung nhịp chính.
Làm việc với mức nguồn trong khoảng 2V đến 5.5V.
Hình 2.3 Sơ đồ chân vi điều khiển PIC16F84A
Sơ đồ chân của vi điều khiển PIC16F84A:
− OSC1/CLKIN là chân ngõ vào của mạch dao động thạch anh, dùng để định tần cho
xung nhịp và cũng là một ngõ vào của mạch tạo xung nhịp.
− OSC2/CLKOUT là chân ngõ ra của mạch dao động thạch anh và đồng thơi cũng là
ngõ ra của xung nhịp.
− MCLR (Master Clear) là chân reset, tác dụng của lệnh reset là trả chương trình về
địa chỉ ban đầu và xác lập lại vị trí ban đầu của các thanh ghi có chức năng đặc biệt.
− RA0, RA1, RA2, RA3 là các chân xuất/nhập dữ liệu của Port A.
− RA4/TOCKI là chân đa nhiệm, vừa làm chân xuất/nhập của Port A và lại là chân lấy
xung cho bộ định thời Timer0.
− RB0/INT là chân đa nhiệm, vừa làm chân xuất/nhập của Port B và lại là chân phát
động theo ngắt ngoài, nó có thể được lập trình để có trở kháng lớn dùng để làm ngõ
vào, nhập trạng thái ngoài vào PIC.
− RB1, RB2, RB3 là các chân xuất/nhập của Port B.
− RB4, RB5 là các chân xuất/nhập của Port B và phát động ngắt theo sự thay đổi trên
các chân này.
− RB6 là chân xuất/nhập của Port B và phát động ngắt theo sự thay đổi trên chân này.
Nó còn có thể lập trình để dùng chân này phát xung nhịp dùng cho công năng truyền
dữ liệu nối tiếp.
− RB7 là chân xuất/nhập của Port B và phát động ngắt theo sự thay đổi trên chân này.
Nó còn có thể lập trình để dùng chân này trao đổi dữ liệu dùng cho công năng truyền
dữ liệu nối tiếp.
− là chân nối mass để lấy dòng.
− là chân nối vào nguồn dương từ 2V đến 5,5V.
Hình 2.4 Sơ đồ khối chức năng của PIC16F84A
Các khối chức năng của PIC16F84A:
− Flash Program Memory có dung lượng 1024 thanh nhớ, rộng 14 bit (1Kx14). Ở đây
Bạn cất giữ các mã lệnh của chượng trình nguồn. Các mã lệnh được truy cập theo mã
địa chỉ có trong thanh ghi PC (Program Counter). Mã lệnh xuất ra trên thanh ghi
Instruction Register.
− Thanh ghi Program Counter dùng ghi các địa chỉ của mã lệnh của bộ nhớ Flash
ROM. Trong hoạt động, khi dùng lệnh nhảy đến các chượng trình con, thì địa chỉ hiện
tại sẽ được tạm thời cho cất giữ trong các thanh ghi ngăn xếp, ở đây chiều xâu ngăn
xếp có 8 lớp (8 Level Stack).
− Ngăn xếp Level Stack dùng lưu giữ các mã địa chỉ của chương trình chính khi trong
chương trình có dùng lệnh nhảy. Địa chỉ cất vào ngăn xếp có thể hiểu như dùng lệnh
Push và địa chỉ lấy ra từ ngăn xếp có thể hiểu như dùng lệnh Pop.
− Instruction Register là thanh ghi mã lệnh. Ở ngõ ra, mã lệnh có thể chuyển đến khối
giải mã Instruction Decode & Control để tạo ra lệnh điều khiển hay chuyển đến khối
xử lý địa chỉ đa kênh Address Multiplex để truy cập các thanh nhớ trong bộ nhớ RAM
(File Register).
− Instruction Decode & Control là khối giải mã, xác định tính năng điều khiển trong
câu lệnh, nó tác dụng vào khối định trạng thái cho IC. Khối này gồm có các chức
năng: Power-up Timer, Oscillator Start-up Timer, Power-on Reset, Watchdog Timer.
o Power-up Timer dùng kích hoạt IC theo đồng hồ Timer.
o Oscillator Start-up Timer dùng kích hoạt mạch dao động theo đồng hồ Timer.
o Power-on Reset dùng reset các thanh ghi trong PIC khi nó mới được cấp nguồn.
o Watchdog Timer là bộ định thời dùng vào/ra mode theo đồng hồ Timer, có tính
năng dùng tiết kiệm điện.
− Timing Generation là khối tạo ra xung nhịp chính, tần số của xung nhịp được định
theo thạch anh.
− Đồng hồ Timer 0 (TMR0) dùng một thanh đếm 8 bit để tạo ra chức năng điều khiển
theo thời gian. Nó có thể đếm tối đa 256 xung nhịp, khi thanh đếm đầy, bit báo tràn sẽ
chuyển lên mức 1.
− I/O Port (gồm Port A có 5 chân và Port B có 8 chân) dùng xuất/nhập dữ liệu. Nhiều
chân còn có tính đa nhiệm, nên ngoài công năng xuất nhập dữ liệu nó còn có các công
năng khác.
− Bộ nhớ dữ liệu EEPROM Data Memory, đây là bộ nhớ xóa ghi được trên 1 triệu
lần, EEPROM có 64 thanh nhớ, với độ rộng 8 bit (1 byte). Để truy cập dữ liệu trong
các thanh nhớ, mã địa chỉ sẽ chuyển vào thanh ghi EEADR và dữ liệu xuất nhập trên
thanh ghi EEDATA.
− Bộ nhớ RAM File Register, đây là bộ nhớ RAM có 68 thanh nhớ, với độ rộng 8 bit,
trong đó có 12 thanh nhớ đặc dụng (SFR, Special Function Register), các thanh nhớ
còn lại được dùng làm thanh nhớ phổ dụng (GPR, General Purpose Register). Các
thanh nhớ đặc dụng xác định hoạt động của IC, các thanh nhớ phổ dụng dùng làm
thanh nhớ tạm. Khi IC mất nguồn, các dữ liệu trong các thanh nhớ RAM đều bị xóa
sạch. Người ta truy cập dữ liệu trong các thanh nhớ của RAM với bó nối mã địa chỉ
RAM Addr và xuất/nhập dữ liệu trên bó nối Data Bus.
− Thanh ghi FSR (File Select Register) dùng truy tìm dữ liệu theo mã địa chỉ gián tiếp
(Indirect Address), dùng bó nối Indirect Addr.
− Thanh ghi STATUS (Status Register) dùng chọn định các điều kiện làm việc cho IC
(Thanh ghi trạng thái này rất thường dùng).
− MUX (Multiplex) là khối xử lý đa nhiệm, nó cung cấp mã cho khối tính toán ALU.
− ALU (Arithmetic & Logic Unit) là khối thực hiện các phép toán số học và logic.
Không có bộ phận này, IC không được gọi là IC máy tính.
− Thanh ghi W reg (Work Register) là thanh ghi công tác (một thanh ghi cực kỳ quan
trọng của PIC), nó cất giữ các kết quả của khối toán ALU.
• Các cổng xuất/nhập của PIC 16F84A:
Cổng xuất/nhập chính là phương tiện mà vi điều khiển dung để tương tác với các
thiết bị bên ngoài. Sự tương tác này rất đa dạng và thông qua quá trình tương tác đó, chức
năng của vi điều khiển được thể hiện một cách rõ ràng.
Một cổng xuất/nhập của vi điều khiển bao gồm nhiều chân, tùy theo cách bố trí và
chức năng của vi điều khiển mà số lượng cổng xuất/nhập và số lượng chân trong mỗi
cổng có thể khác nhau. Bên cạnh đó, do vi điều khiển được tích hợp sẵn bên trong các
đặc tính giao tiếp ngoại vi nên bên cạnh chức năng là cổng xuất nhập thông thường, một
số chân xuất nhập còn có thêm các chức năng khác để thể hiện sự tác động của các đặc
tính ngoại vi nêu trên đối với các thiết bị bên ngoài. Chức năng của từng chân xuất/nhập
trong mỗi cổng hoàn toàn có thể được xác lập và điều khiển thông qua các thanh ghi SFR
liên quan đến chân xuất/nhập của nó.
Port A:
Port A bao gồm 5 chân xuất nhập dữ liệu RA0-RA4. Chức năng xuất/nhập dữ liệu
được điều khiển bởi thanh ghi TRISA (địa chỉ 85h). Muốn xác lập chức năng của một
chân trong Port A là input, ta “set” bit điều khiển tương ứng với chân đó trong thanh ghi
TRISA và ngược lại, muốn xác lập chức năng của một chân trong Port A là output, ta
“clear” bit điều khiển tương ứng với chân đó trong thanh ghi TRISA.
Riêng với chân RA4 được tích hợp thêm chức năng cung cấp xung clock ngoài cho
Timer0 (RA4/T0CKI)
Address
Name
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
05h
85h
PORTA
TRISA
-
-
-
RA4/T0CKI
TRISA4
RA3
TRISA3
RA2
TRISA2
RA1
TRISA1
RA0
TRISA0
Ghi chú: x-Giá trị không rõ, u-Giá trị không thay đổi,
Value on
Power-on
Reset
- - -x xxxx
- - -1 1111
Value on
all other
RESETS
- - -u uuuu
- - -1 1111
Các ô tô bóng không được dùng bởi PortA
Bảng 2.3 Các thanh ghi liên quan đến Port A
Port B:
Port B bao gồm 8 chân xuất/nhập dữ liệu RB0-RB7. Chức năng xuất/nhập dữ liệu
được điều khiển bởi thanh ghi TRISB (địa chỉ 86h). Muốn xác lập chức năng của một
chân trong Port B là input, ta “set” bit điều khiển tương ứng với chân đó trong thanh ghi
TRISB và ngược lại, muốn xác lập chức năng của một chân trong Port B là output, ta
“clear” bit điều khiển tương ứng với chân đó trong thanh ghi TRISB.
Đối với các chân RB4-RB7 là các chân đa nhiệm, có khả năng phát động ngắt khi có
sự thay đổi trạng thái trên các chân.
Address
Name
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
06h
86h
PORTB
TRISB
RB6
TRISB6
81h
0Bh,8Bh
OPTION_REG
INTCON
RB7
TRISB
7
RBPU
GIE
RB5
TRISB
5
T0CS
T0IE
RB4
TRISB
4
T0SE
INTE
RB3
TRISB
3
PSA
RBIE
RB2
TRISB
2
PS2
T0IF
RB1
TRISB
1
PS1
INTF
RB0
TRISB
0
PS0
RBIF
INTEDG
EEIE
Value on
Power-on
Reset
- - -x xxxx
- - -1 1111
Value on
all other
RESETS
- - -u uuuu
- - -1 1111
1111 1111
0000 000x
1111 1111
0000 000u
Ghi chú: x-Giá trị không rõ, u-Giá trị không thay đổi,
Các ô tô bóng không được dùng bởi PORTB
Bảng 2.4 Các thanh ghi liên quan đến PORTB
• Dao động thạch anh cho vi điều khiển PIC:
Mỗi vi điều khiển hoạt động điều cần một xung clock nhất định. Đối với PIC16F84A,
hai chân OSC1/CLKIN (chân 16) và OSC2/CLKOUT (chân 15) cung cấp dao động cho
vi điều khiển PIC hoạt động.
Hình 2.5 Mạch dao động thạch anh cho PIC 16F84A
Trong thiết kế mạch điều khiển bài toàn ở đây chúng ta sẽ sử dụng loại thạch anh ở
chế độ XT ( 4MHz). Thời gian một chu kỳ dao động của thạch anh:
Từ đó ta tính được thời gian hoạt động của một chu kỳ máy:
Việc mắc thêm các tụ lọc giúp tăng tính ổn định của bộ dao động, tuy nhiên giá trị
của tụ không quá lớn hay quá nhỏ để dao động ổn định và thời gian khởi động ngắn. Với
điện thế =5V thì ta sử dụng tụ có trị số 33pF.
b, IC 74HC595
IC 74HC595 là IC ghi dịch 8bit kết hợp chốt dữ liệu, đầu vào nối tiếp, đầu ra song
song.
Chức năng của IC 74HC595 trong mạch dùng để mở rộng chân của vi điều khiển.
Hình 2.6 Sơ đồ chân của IC 74HC595
Sơ đồ chân của IC 74HC595:
− Q0,Q1-Q7 (15,1,2,3,4,5,6,7) là các chân xuất dữ liệu khi chân chân EO tích cực ở
mức thấp và có một xung tích cực ở sườn âm tại chân chốt STCP.
− Q7S là chân dữ liệu nối tiếp. Nếu dùng nhiều IC 74HC595 mắc nối tiếp nhau thì chân
này đưa vào đầu vào của con tiếp theo khi đã dịch đủ 8bit.
− DS (Data Shift) là chân ngõ vào của IC (74HC595 là IC vào nối tiếp nên ta chỉ cần
một chân ngõ vào). Tại 1 thời điểm xung clock chỉ đưa vào được 1 bit
− là chân cấp nguồn dương cho IC (5V).
− GND là chân cực âm của nguồn cho IC.
− SHCP (Shift Clock Pulse) là chân đưa xung nhịp vào IC và khi có cạnh lên của xung
thì IC đưa tín hiệu ở ngõ vào bộ nớ của IC để chờ xử lý.
− STCP (Storage Clock Pulse) là chân đưa xung nhịp vào IC để khi có cạnh lên của
xung thì IC đưa toàn bộ 8bit dữ liệu đã được lưu ra ngõ ra của IC.
− MR (Master Reset) là chân reset IC (trả IC về trạng thái ban đầu). Khi chân này tích
cực thì toàn bộ bộ nhớ IC sẽ bị xóa về 0, tuy nhiên lúc này tín hiệu ở ngõ ra vẫn giữ
nguyên, không bị xóa. Chân này tích cực ở mức thấp (0V).
− OE (Output Enable) là chân cho phép ngõ ra, tích cực mức thấp. Mức 0 là cho phép
ngõ ra, mức 1 là không cho phép ngõ ra.
Hình 2.7 Cấu tạo chức năng của IC 74HC595
Phương thức hoạt động của IC 74HC595:
− Ta đặt dữ liệu vào chân DS, và tạo một xung SHCP thì dữ liệu tại chân DS sẽ được
dịch vào thanh ghi 8-STAGE SHIFT REGISTER.
− Dịch lần lượt 8bit dữ liệu cần tuyền, thì ta được 8 bit trong thanh ghi 8-STAGE
SHIFT REGISTER.
Sau đó ta tạo một xung trên STCP thì 8 bit trong thanh ghi 8-STAGE SHIFT
REGISTER sẽ được sao chép sang thanh ghi 8-BIT STORAGE REGISTER. Lúc
này nếu chân OE ở mức thấp thì ngõ ra sẽ bằng với giá trị thanh ghi 8-BIT
STORAGE REGISTER, còn nếu chân OE ở mức cao thì ngõ ra ở trạng thái tổng trở
cao.
Chú ý:
o Khi dịch dữ liệu vào thanh ghi 8-STAGE SHIFT REGISTER, và chưa tạo xung
STCP thì thanh ghi 8-BIT STORAGE REGISTER sẽ giữ nguyên trạng thái và
ngõ ra cũng giữ nguyên trạng thái.
o Khi chân MR ở mức 0 thì dữ liệu trên thanh ghi 8-STAGE SHIFT REGISTER
sẽ bị xóa, còn thanh ghi 8-BIT STORAGE REGISTER sẽ giữ nguyên trạng thái
và ngõ ra cũng giữ nguyên trạng thái.
2.3.4 Khối nguồn
Hình 2.8 Mạch nguồn 5v
Trên là mạch ổn áp 5V khá đơn giản sử dụng 7805 . Mạch có bảo vệ chống dòng
ngược, bảo vệ quá tải. Công suất đầu ra khá thấp (5W). Mạch được sử dụng nhiều
trong các mạch điều khiển, mạch cấp nguồn cho các mạch tín hiệu.
• Do mạch sử dụng linh kiện ổn áp 7805 nên hoạt động của mạch chính là sự
hoạt động bên trong của 7805.
Hình 2.9 7805
Điện áp vào từ 7-12 V DC được nối vào chân 1 (INPUT).
Điện áp ra 5V DC được lấy từ chân 3 (OUTPUT).
Chân 2 là chân chung nối âm
Trên thực tế thì linh kiện ổn áp 7805 được dùng rất nhiều trong các mạch điện điều
khiển dùng để cấp nguồn ổn định cho mạch. Với ưu điểm là dễ ghép nối , dễ thiết kế với
chi phí thấp, nguồn đầu ra ổn định. Nhược điểm của nó là công suất đầu ra khá thấp (1A)
và hoạt động không ổn định khi có nhiễu bên ngoài. Hoạt động được ở giải nhiệt độ khá
cao là 0-125 độ C
* 7805 có 3 chân cho ta kết nối với nó : Chân 1 là chân nguồn đầu vào, chân 2 là chân
GND , chân 3 là chân lấy điện áp ra.
* Đảm bảo tản nhiệt tốt cho 7805 khi chạy với tải. Khi công suất tăng lên thì do 7805 là
linh kiện bán dẫn công suất nên rất nóng khi tải lớn. Để tráng hỏng linh kiện và cho linh
kiện hoạt động trong nhiệt độ bình thường thì cần phải tản nhiệt tốt.
• Tụ C1 là lọc nguồn đầu vào cho 7805. Tụ này là tụ hóa phải có điện dung đủ
lớn để lọc phẳng điện áp đầu vào và điện áp tụ chịu đựng phải lớn hơn điện áp
đầu vào.
• Tụ C4 là lọc nguồn đầu ra cho 7805. Tụ này cũng là tụ hóa dùng để lọc nguồn
đầu ra cho bằng phẳng.
• Trong thành phần một chiều còn có các sóng điều hòa bậc 2, 3 , sóng nhấp
nhô có tần số cao, nhiễu bên ngoài. Các sóng này ảnh hưởng đến hoạt động
của 7805. Nếu trong mạch tồn tại những thành phần sóng này sẽ làm sai sót
khó phát hiện trong mạch làm cho mạch hoạt động không ổn định .Hai tụ lọc
nhiễu tần số cao C2 và C4. Tụ này phải là tụ không phân cực.
2.3.5 Khối hiển thị
Khối hiển thị có chức năng đưa ra thông tin hiển thị tương ứng với trạng thái hiện
thời của hệ thống. Khối này gồm 2 phần: đèn hiển thị tín hiệu đèn giao thông và đồng hồ.
Đèn hiển thị tín hiệu đèn giao thông bao gồm: Đèn dành cho các phương tiện tham
gia giao thông: xanh, đỏ, vàng.
Các linh kiện trong bộ hiển thị
Trong các thiết bị, để báo trạng thái hoạt động của thiết bị đó cho người sử dụng với
thông số chỉ là các dãy số đơn thuần, thường người ta sử dụng “ Led 7 đoạn ”. Led 7
đoạn được sử dụng khi các thông số không đòi hỏi quá phức tạp, chỉ cần hiển thị số là đủ,
chẳng hạn Led 7 đoạn được sử dụng để hiển thị nhiệt độ phòng, trong các đồng hồ trong
các đồng hồ treo tường bằng điện tử, hiển thị số lượng sản phẩm được kiểm tra sau một
công đoạn nào đó
Sơ đồ vị trí các Led :
Các điện trở 330Ω là các điện trở bên ngoài được kết nối để giới hạn dòng điện qua
Led nếu Led 7 đoạn được nối với nguồn 5V.
Hình 2.10 Sơ đồ chân 7 SEG-COM-CATHODE và hình ảnh minh họa
2.4 Nguyên lý hoạt động của mô hình
2.5 Mạch nguyên lý
Hình 2.11 Sơ đồ mô phỏng led 7 thanh
2.6 Mạch in
Hình 2.12 Mạch in
Hình 2.12 Mạch in 3D
Chương 3. XÂY DỰNG CHƯƠNG TRÌNH ĐIỀU KHIỂN
3.1 Lưu đồ thuật toán
Hình 3.1 Lưu đồ thuật toán chương trình chính
Hình 3.2 lưu đồ thuật toán chương trình ngắt
Hình 3.3 Delay
Hình3.4 Mảng mã led 7 thanh
Hình 3.5 Truyền 595
3.2 Chương trình chính
3.3 Kết quả thu được
Kết luận
Sau một thời gian nỗ lực học tập không ngừng cũng như được sự chỉ bảo
tận tình của Ths. Nguyễn Thế Lực cũng như các thầy cô giáo bộ
môn,nhóm chúng em đã hoàn thành được đề tài “Thiết kế và mô phỏng hệ
thống đèn giao cho thông ngã tư”.Trong thời gian thực hiện đề tài nhóm
em đã đúc kết ra nhiều kinh nghiệm cho bản thân để phục vụ cho học tập
và làm việc sau này.
Đề tài của chúng em có những ưu nhược điểm sau :
* Ưu điểm
-Ta có thể áp dụng mạch này vào thực tế
-Việc thiết kế đơn giản tiệt kiệm chi phí
* Nhược điểm
-Mạch thiết kế chưa tối ưu
-Tính khả dụng chưa cao
Cuối cùng chúng em xin một lần nữa gửi lời cám ơn chân thành đến các
thầy Ths. Nguyễn Thế Lực cùng các thầy cô giáo bộ môn đã giúp đỡ
chúng em rất nhiều trong quá trình thực hiện đề tài ,chúng em xin chân
thành cám ơn
Tài liệu tham khảo
[1].
[2].
Datasheet pic 16F84A
/>